💬 Building a Orange Pi Gateway
-
@Tag i use same files that use for raspberry. for raspberry worked. is this different between mysensors for raspberry and orange? i must download again ?
-
@Reza <- Yes do all the procedure from the beginning :
-
@SdeWeb i do all steps that is orangepi page. but just i dont run this :
git clone https://github.com/mysensors/MySensors.gitand copy this files from flash memory . is this incorrect ?
-
@SdeWeb i do all steps that is orangepi page. but just i dont run this :
git clone https://github.com/mysensors/MySensors.gitand copy this files from flash memory . is this incorrect ?
-
@SdeWeb
armbian for orangepi one
now i add this line :
#define MY_RADIO_NRF24so i think ok but :
root@orangepione:~/MySensors# make gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o g++ -MT build/drivers/Linux/SerialSimulator.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialSimulator.cpp -o build/drivers/Linux/SerialSimulator.o g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o examples_linux/mysgw.cpp:31:0: warning: "MY_RADIO_NRF24" redefined #define MY_RADIO_NRF24 ^ <command-line>:0:0: note: this is the location of the previous definition g++ -MT build/drivers/SPIDEV/SPI.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/SPIDEV/SPI.cpp -o build/drivers/SPIDEV/SPI.o g++ -pthread -o bin/mysgw build/drivers/Linux/log.o build/drivers/Linux/noniso.o build/drivers/Linux/GPIO.o build/drivers/Linux/Print.o build/drivers/Linux/EthernetClient.o build/drivers/Linux/SerialPort.o build/drivers/Linux/Stream.o build/drivers/Linux/IPAddress.o build/drivers/Linux/compatibility.o build/drivers/Linux/interrupt.o build/drivers/Linux/SerialSimulator.o build/drivers/Linux/SoftEeprom.o build/drivers/Linux/EthernetServer.o build/examples_linux/mysgw.o build/drivers/SPIDEV/SPI.o root@orangepione:~/MySensors# sudo ./bin/mysgw -d mysgw: Config file /etc/mysensors.dat does not exist, creating new config file. mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=1 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=2 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=3 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=4 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=5 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=6 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=7 mysgw: TSM:FAIL:PDT -
@SdeWeb
armbian for orangepi one
now i add this line :
#define MY_RADIO_NRF24so i think ok but :
root@orangepione:~/MySensors# make gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o g++ -MT build/drivers/Linux/SerialSimulator.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialSimulator.cpp -o build/drivers/Linux/SerialSimulator.o g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o examples_linux/mysgw.cpp:31:0: warning: "MY_RADIO_NRF24" redefined #define MY_RADIO_NRF24 ^ <command-line>:0:0: note: this is the location of the previous definition g++ -MT build/drivers/SPIDEV/SPI.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/SPIDEV/SPI.cpp -o build/drivers/SPIDEV/SPI.o g++ -pthread -o bin/mysgw build/drivers/Linux/log.o build/drivers/Linux/noniso.o build/drivers/Linux/GPIO.o build/drivers/Linux/Print.o build/drivers/Linux/EthernetClient.o build/drivers/Linux/SerialPort.o build/drivers/Linux/Stream.o build/drivers/Linux/IPAddress.o build/drivers/Linux/compatibility.o build/drivers/Linux/interrupt.o build/drivers/Linux/SerialSimulator.o build/drivers/Linux/SoftEeprom.o build/drivers/Linux/EthernetServer.o build/examples_linux/mysgw.o build/drivers/SPIDEV/SPI.o root@orangepione:~/MySensors# sudo ./bin/mysgw -d mysgw: Config file /etc/mysensors.dat does not exist, creating new config file. mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=1 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=2 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=3 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=4 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=5 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=6 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=7 mysgw: TSM:FAIL:PDT -
@SdeWeb
armbian for orangepi one
now i add this line :
#define MY_RADIO_NRF24so i think ok but :
root@orangepione:~/MySensors# make gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o g++ -MT build/drivers/Linux/SerialSimulator.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialSimulator.cpp -o build/drivers/Linux/SerialSimulator.o g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o examples_linux/mysgw.cpp:31:0: warning: "MY_RADIO_NRF24" redefined #define MY_RADIO_NRF24 ^ <command-line>:0:0: note: this is the location of the previous definition g++ -MT build/drivers/SPIDEV/SPI.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/SPIDEV/SPI.cpp -o build/drivers/SPIDEV/SPI.o g++ -pthread -o bin/mysgw build/drivers/Linux/log.o build/drivers/Linux/noniso.o build/drivers/Linux/GPIO.o build/drivers/Linux/Print.o build/drivers/Linux/EthernetClient.o build/drivers/Linux/SerialPort.o build/drivers/Linux/Stream.o build/drivers/Linux/IPAddress.o build/drivers/Linux/compatibility.o build/drivers/Linux/interrupt.o build/drivers/Linux/SerialSimulator.o build/drivers/Linux/SoftEeprom.o build/drivers/Linux/EthernetServer.o build/examples_linux/mysgw.o build/drivers/SPIDEV/SPI.o root@orangepione:~/MySensors# sudo ./bin/mysgw -d mysgw: Config file /etc/mysensors.dat does not exist, creating new config file. mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=1 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=2 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=3 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=4 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=5 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=6 mysgw: TSM:FAIL:PDT mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=7 mysgw: TSM:FAIL:PDT -
Seems you are not able to communicate with your radio..... you need to figure out which GPIO pins you need to use, and which SPI channel.....
The steps from the OrangePI page are based on the OrangePI zero model
-
@Reza
Your GW is OK, so exit debug mode by use Ctrl + C command, then follow the end of the procedure to install and auto start GW services.Regards.
-
@SdeWeb so now my problem is related to GPIO and configure this ? can you help me that how i can configure this ?
I do not have the OPI One HW available..... so that will be a problem.
you need to start reading the OPI documentation, and see if the pinout you are using is correct, I know for example that OPI Zero used the SPI1 channel since SPI0 is used for the NAND flash. now it might be that the OPI One does not have the NAND flash so you can use the SPI0 channel.Try to start here
or here
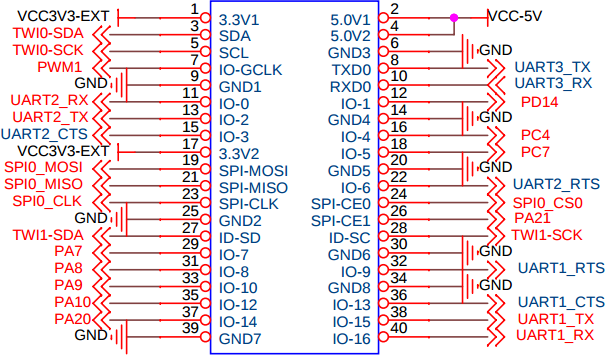
If you read carefully you will see that pin 19-21-23 are on the opi ONE SPI0, and on the OPI Zero SPI1.....
This is the OPI Zero page: http://linux-sunxi.org/Orange_Pi_Zero#Orientation_of_the_GPIO_header
ANd the OPI One page:
http://linux-sunxi.org/Orange_Pi_One#Orientation_of_the_GPIO_header@marceloaqno helped build this for the OPI Zero.... and SPI was an important part to get this working...
Try this:
./configure --spi-spidev-device=/dev/spidev0.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=3worth a try if you use SPI0, and GPIO3 for the CE pin (on the ONE the ce SPI0 pin is 3 according to the wiki page)
-
I do not have the OPI One HW available..... so that will be a problem.
you need to start reading the OPI documentation, and see if the pinout you are using is correct, I know for example that OPI Zero used the SPI1 channel since SPI0 is used for the NAND flash. now it might be that the OPI One does not have the NAND flash so you can use the SPI0 channel.Try to start here
or here
If you read carefully you will see that pin 19-21-23 are on the opi ONE SPI0, and on the OPI Zero SPI1.....
This is the OPI Zero page: http://linux-sunxi.org/Orange_Pi_Zero#Orientation_of_the_GPIO_header
ANd the OPI One page:
http://linux-sunxi.org/Orange_Pi_One#Orientation_of_the_GPIO_header@marceloaqno helped build this for the OPI Zero.... and SPI was an important part to get this working...
Try this:
./configure --spi-spidev-device=/dev/spidev0.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=3worth a try if you use SPI0, and GPIO3 for the CE pin (on the ONE the ce SPI0 pin is 3 according to the wiki page)
-
I do not have the OPI One HW available..... so that will be a problem.
you need to start reading the OPI documentation, and see if the pinout you are using is correct, I know for example that OPI Zero used the SPI1 channel since SPI0 is used for the NAND flash. now it might be that the OPI One does not have the NAND flash so you can use the SPI0 channel.Try to start here
or here
If you read carefully you will see that pin 19-21-23 are on the opi ONE SPI0, and on the OPI Zero SPI1.....
This is the OPI Zero page: http://linux-sunxi.org/Orange_Pi_Zero#Orientation_of_the_GPIO_header
ANd the OPI One page:
http://linux-sunxi.org/Orange_Pi_One#Orientation_of_the_GPIO_header@marceloaqno helped build this for the OPI Zero.... and SPI was an important part to get this working...
Try this:
./configure --spi-spidev-device=/dev/spidev0.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=3worth a try if you use SPI0, and GPIO3 for the CE pin (on the ONE the ce SPI0 pin is 3 according to the wiki page)
-
@Tag thank you. but i can not setup this . very complicated :) perhaps @marceloaqno can setup this.
thank youCan imagine that it is complicated, assuming you used the OPI zero pinout, try the configure example from my previous post. might work.
Another option you have is get an arduino with the radio attached and just plug it into usb, your messages will appear on i.e /dev/ttyUSB0
-
try this:
./configure --spi-spidev-device=/dev/spidev0.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=3See this page for your header pinout: http://linux-sunxi.org/Orange_Pi_One#Orientation_of_the_GPIO_header
the --my-rf24-cs-pin= is key to have it right on your system
-
-
try this:
./configure --spi-spidev-device=/dev/spidev0.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=3See this page for your header pinout: http://linux-sunxi.org/Orange_Pi_One#Orientation_of_the_GPIO_header
the --my-rf24-cs-pin= is key to have it right on your system
-
@Tag my-rf24-cs-pin=3 . 3 is pin15 ? i do it. cs is connect to pin15 (GPIO3) and configre again .but dont work
-
@Reza Try to connect like mine, look above in this thread, then use my own ./configure setup.
If it's not work, try to use the .fex file for your Orange PI download it here :
http://linux-sunxi.org/Orange_Pi_One#Sunxi.2FLegacy_Kernel@SdeWeb said in 💬 Building a Orange Pi Gateway:
If it's not work, try to use the .fex file for your Orange PI download it here :
sorry i cannot understand what is say in this link. thank you .perhaps other friend can found this for orange pi one or lite . i cannot understand really.
-
@Tag my-rf24-cs-pin=3 . 3 is pin15 ? i do it. cs is connect to pin15 (GPIO3) and configre again .but dont work
Did you also change the SPI channel?
--spi-spidev-device=/dev/spidev0.0if you use the OPIzero pinout, SPI1 will be SPI0 on the OPI one......
Your other option will be using a serial gateway: https://www.mysensors.org/build/serial_gateway
This works for sure on the OPI One -
Did you also change the SPI channel?
--spi-spidev-device=/dev/spidev0.0if you use the OPIzero pinout, SPI1 will be SPI0 on the OPI one......
Your other option will be using a serial gateway: https://www.mysensors.org/build/serial_gateway
This works for sure on the OPI One