openHAB 2.5 binding and V_VARx
-
Hello.
I hope someone can help me with an issue I'm facing while using mySensors binding for rolling shutters and using V_VAR channels.
My Setup:
Software:
openHAB 2.5.5 stable release
MySensors openHAB binding 2.5.0.202002161928
Hardware:
MySensors Ethernet gateway
Rollershutters with functions UP/DOWN and TILT UP/TILT DOWN (7 TILT positions, like horizontal blinds) (no KNX!)The plan:
Whenever openHAB starts I want openHAB to request the status of my rollershutter positions (UP or DOWN) and blind positions (1/7, 2/7 ... 7/7).
Whenever the rollershutter position or blind position changes the node is supposed to send the new status to the controller/openHAB.Implementation:
On the mySensors node I keep variables for rollershutter positions (0% = open to 100% = closed) and tilt-position (1/7 = min tilt to 7/7 fully tilt).
The node sends both positions either when a command has been executed to change them (UP/DOWN or TILT-UP/TILT-DOWN) or when the controller requests them (via request command = message type = C_REQ).
I've implemented an openHAB rule which priodically (for testing purposes every minute) requests the positions of the rollershutters and blind-position from the node, the node responds with both positions using V_VAR3 (rollershutter position) and V_VAR4 (tilt position).
These requests cprrectly arrive at the node and the node responds with its position-values.Problem:
When replying with the rollershutter position to the openhab rule request with e.g. 100 I get error "value must be between 0 and 100.
When replying with the tilt position to the openhab rule request with e.g. 1 (for 1/7) or 0.14 (for 1/7th) the openHAB log shows error "value must be between 0 and 100.
Whenever the node sends values 0 or 1 openhab accepts the values!What I tried so far:
I assumed openHAB expects a percent value hence requiring a value between 0 and 1 (even though it says it must be between 0 and 100) so I tried to adjust my mySensors code to send decimals bt. 0 and 1 to represent values bt. 0 and 100 (percent) - no luck though!
The log only shows 1.0 or 0.0 being received from node eventhough the node sends float(shutter position) / 100.0 for rollershutter position or float(tilt position) / 7.0 for tilt position.
I've tried different formatting in the items file ([%.2f], [%d], none and many others) - no help!Is it possible that there is a bug in the binding implementation of V_VAR1 to V_VAR4 ?
It seems to only accept values 0 and 1 for the V_VAR channels.
Is it me? Am I missing anything here?Any help is highly appreciated!
Thanks,
Ralph...Things:
Bridge mysensors:bridge-eth:gateway @ "Wohnzimmer" [ ipAddress="10.0.0.11", tcpPort=5003, startupCheckEnabled=true, imperial=false, sendDelay=200, networkSanCheckSendHeartbeat=false, networkSanCheckInterval=3, networkSanCheckSendHeartbeatFailAttempts=10, networkSanCheckEnabled=true, networkSanCheckConnectionFailAttempts=3 ] { cover BueroRalphJalousie "Jalousie" @ "Büro Ralph" [ nodeId=7, childId=4, requestAck=false ] }Items:
Rollershutter BueroRalphJalousieAufAb "Auf/ab" { channel="mysensors:cover:gateway:BueroRalphJalousie:cover" } Number BueroRalphJalousieStatusAufAb "Status Auf/ab [%d]" { channel="mysensors:cover:gateway:BueroRalphJalousie:var3" } Number BueroRalphJalousieStatusTilt "Status Tilt [%.2f]" { channel="mysensors:cover:gateway:BueroRalphJalousie:var4" }Rule:
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// // Stati von Node erfragen: rule HoleUnbekannteStati when Time cron "0 0/1 * 1/1 * ? *" //alle 1 Minuten then // Jalousiesteuerung - UG: if ( BueroRalphJalousieStatusAufAb.state == NULL || BueroRalphJalousieStatusTilt.state == NULL ) { // make the node send in positions for rollershutters and blinds (yes it sends both even though only one (V_VAR3) is being requested!): sendCommand(mySMsg01, "7;4;2;0;26"); //erfrage Jalousie-AufAb-Status Buero Ralph von Node 7, Child 4, 2=request, 0 = kein acknowlege, 26 = V_VAR3 if ( DebugLogger.state == ON ) { logInfo( "Jalousien.Rules.HoleUnbekannteStati", "Jalousie-Stati Buero Ralph werden von Node erfragt") } } endmySensors code (excerpt):
void receive(const MyMessage &IncomingMessage) { // Eingehende Anfrage: if (IncomingMessage.destination == MY_NODE_ID && IncomingMessage.getCommand() == C_REQ ) //Wert fuer ein Child wird abgefragt! { for (byte i = 1; i <= AnzahlRaeume; i++) { if (i == IncomingMessage.sensor) { if (IncomingMessage.type == V_VAR3 || IncomingMessage.type == V_VAR4) { send(Jalousien[i - 1].MessageStatusAufAb.set(Jalousien[i - 1].StatusAufAb, 1), false); send(Jalousien[i - 1].MessageStatusTilt.set(Jalousien[i - 1].StatusTilt, 1), false); } } } } }mySensors code (full copy):
#include <Arduino.h> //#define MY_DEBUG #define MY_RADIO_RF24 #define MY_NODE_ID 7 #define MY_REPEATER_FEATURE #include <MySensors.h> #define MY_RF24_PA_LEVEL RF24_PA_HIGH //#define ACTIVE_LOW // comment out this line if your relays are active high #ifdef ACTIVE_LOW #define BitShiftRelaisNummer ~(1U << (RelaisNummer-1)) #define AlleRelaisAus 0xFFFF #else #define BitShiftRelaisNummer (1U << (RelaisNummer-1)) #define AlleRelaisAus 0U #endif int RelaisNummer; #define AnzahlRaeume 8 // Anzahl der Raeume //Setup Shift Register: const int clockPin = 4; const int outputEnablePin = 6; const int dataPin = 7; const int latchPin = 8; typedef enum { V_TILT_UP = 90, V_TILT_DOWN = 91, V_TILT_UP3 = 92, V_TILT_DOWN3 = 93, } custom_mysensors_data_t; typedef struct Jalousie { uint8_t RaumNummer; char *RaumName; int RelaisNummerAuf; int RelaisNummerAb; int Fahrzeit; int TiltSchritte; int Command; uint8_t StatusAufAb; // (0=UP, 100=DOWN, 99=unknown), StatusTilt (0=UP) uint8_t StatusTilt; // (0=OPEN, 7=CLOSE, 9=unknown), StatusTilt (0=UP) MyMessage MessageStatusAufAb; MyMessage MessageStatusTilt; } JalousieTyp; JalousieTyp Jalousien[AnzahlRaeume] = //RaumNummer, RaumName, RalaisNummer Funktion "AUF", RelaisNummer Funktion "AB", Fahrzeit in Sek., TiltSchritte, Command, StatusAufAb (0=UP, 100=DOWN, 99=unknown), StatusTilt (0=UP, 100=DOWN, 99=unknown) { { 1, "Büro Christine", 1, 2, 45, 7, 0, 99, 0 }, { 2, "Spielzimmer", 3, 4, 65, 7, 0, 99, 0 }, { 3, "Nebenküche", 5, 6, 45, 7, 0, 99, 0 }, { 4, "Büro Ralph", 7, 8, 45, 7, 0, 99, 0 }, { 5, "Esszimmer", 9, 10, 65, 7, 0, 99, 0 }, { 6, "Wohnzimmer Terrasse", 11, 12, 65, 7, 0, 99, 0 }, { 7, "Wohnzimmer Garten", 13, 14, 65, 7, 0, 99, 0 }, { 8, "Küche", 15, 16, 65, 7, 0, 99, 0 } }; //////////////////////////////////////////////////////////////////////////////// void setup() { #ifdef DEBUG_ON Serial.println(); Serial.println("SETUP - BEGIN"); #endif // BitShiftRegister vorbereiten: pinMode(latchPin, OUTPUT); pinMode(clockPin, OUTPUT); pinMode(dataPin, OUTPUT); pinMode(outputEnablePin, OUTPUT); digitalWrite(outputEnablePin, LOW); // BitShiftRegister auf "alles aus" schalten: digitalWrite(latchPin, LOW); //DatenPipeline fuer BitShiftRegister "lahm" legen shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); //DatenPipeline in das BitShiftRegister laden: shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); digitalWrite(latchPin, HIGH); //neue Daten im BitShiftRegister aktivieren: // Jalousie-Messages vorbereiten: #ifdef DEBUG_ON Serial.println(); Serial.println("RaumNummer, RelaisName, RelaisNr-AUF, RelaisNr-AB, Fahrzeit, Command, StatusAufAb, StatusTilt"); #endif for (byte i = 1; i <= AnzahlRaeume; i++) { Jalousien[i - 1].MessageStatusAufAb.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusAufAb.setType(V_VAR3); Jalousien[i - 1].MessageStatusTilt.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusTilt.setType(V_VAR4); #ifdef DEBUG_ON Serial.println(Jalousien[i - 1].RaumNummer + ", " + Jalousien[i - 1].RaumName, + ", " + Jalousien[i - 1].RelaisNummerAuf + ", " + Jalousien[i - 1].RelaisNummerAb + ", " + Jalousien[i - 1].Fahrzeit + ", " + Jalousien[i - 1].Command + ", " + Jalousien[i - 1].StatusAuf + ", " + Jalousien[i - 1].StatusAb); #endif } #ifdef MY_DEBUG Serial.println(); Serial.println("SETUP - END"); #endif } ////////////////////////////////////////////////////////////////////////////////////// void presentation() { #ifdef MY_DEBUG Serial.println(); Serial.println("PRESENTATION - BEGIN"); #endif sendSketchInfo("Jalousie-Controller EG", "1.1"); for (byte i = 1; i <= AnzahlRaeume; i++) { present(Jalousien[i - 1].RaumNummer, S_COVER, Jalousien[i - 1].RaumName, false); //Jalousie } #ifdef MY_DEBUG Serial.println(); Serial.println("PRESENTATION - END"); #endif } ////////////////////////////////////////////////////////////////////////////// void JalousieBewegen(int RaumNummer, uint8_t Command) { const int DauerTilt = 150; const int DauerFahren = 1100; int Signaldauer = DauerTilt; int cycles = 1; #ifdef MY_DEBUG Serial.println(); Serial.println("JalousieFahren - BEGIN"); Serial.print("Command: "); Serial.println(Command); #endif // RelaisNummer (Funktion also AUF- oder AB-Relais) ermitteln und Signaldauer (Fahren oder TILT) festlegen: switch (Command) { case V_UP: RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; Signaldauer = DauerFahren; Jalousien[RaumNummer - 1].StatusAufAb = 0; Jalousien[RaumNummer - 1].StatusTilt = 0; break; case V_DOWN: RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAb; Signaldauer = DauerFahren; Jalousien[RaumNummer - 1].StatusAufAb = 100; Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].TiltSchritte; break; case V_STOP: RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; Jalousien[RaumNummer - 1].StatusAufAb = 99; break; case V_PERCENTAGE: // Hole Prozentsatz (0-100 oder STOP): // to be implemented RelaisNummer = 0; break; case V_TILT_UP: //90 TILT-UP RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; if (Jalousien[RaumNummer - 1].StatusTilt >= cycles) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt - cycles; } break; case V_TILT_DOWN: //"91 TILT-DOWN" RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAb; if (Jalousien[RaumNummer - 1].StatusTilt <= ( Jalousien[RaumNummer - 1].TiltSchritte - cycles )) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt + 1; } break; case V_TILT_UP3: //"92 TILT-UP3" RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; cycles = 3; if (Jalousien[RaumNummer - 1].StatusTilt >= cycles) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt - cycles; } break; case V_TILT_DOWN3: //"93 TILT-DOWN3" RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAb; cycles = 3; if (Jalousien[RaumNummer - 1].StatusTilt <= (Jalousien[RaumNummer - 1].TiltSchritte - cycles)) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt + cycles; } break; }; #ifdef MY_DEBUG Serial.print("Raumnummer: "); Serial.println(RaumNummer); Serial.print("JalousieRelaisNummer: "); Serial.println(RelaisNummer); Serial.print("BitShift-Relais-Nummer: "); Serial.println(BitShiftRelaisNummer); #endif // Relais (FunktionsNummer) fuer Signaldauer schalten: if (RelaisNummer != 0) { for (int i = 1; i <= cycles; i++) { // Relais einschalten: #ifdef MY_DEBUG Serial.println("Schaltet ein"); #endif digitalWrite(latchPin, LOW); //DatenPipeline fuer BitShiftRegister "lahm" legen shiftOut(dataPin, clockPin, MSBFIRST, highByte(BitShiftRelaisNummer)); //DatenPipeline in das BitShiftRegister laden shiftOut(dataPin, clockPin, MSBFIRST, lowByte(BitShiftRelaisNummer)); digitalWrite(latchPin, HIGH); //neue Daten im BitShiftRegister aktivieren // Relais "gedrueckt" lassen: #ifdef MY_DEBUG Serial.print("wartet "); Serial.print(Signaldauer); Serial.println(" ms"); #endif wait(Signaldauer); // Relais ausschalten: #ifdef MY_DEBUG Serial.println("Schaltet aus"); #endif digitalWrite(latchPin, LOW); //DatenPipeline fuer BitShiftRegister "lahm" legen shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); //DatenPipeline in das BitShiftRegister laden shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); //doppelt??? digitalWrite(latchPin, HIGH); //neue Daten im BitShiftRegister aktivieren if (cycles > 1) { wait(750); } } } // Neuen Zustand an Controller melden: send(Jalousien[RaumNummer - 1].MessageStatusAufAb.set(Jalousien[RaumNummer - 1].StatusAufAb, 1), false); send(Jalousien[RaumNummer - 1].MessageStatusTilt.set(Jalousien[RaumNummer - 1].StatusTilt, 1), false); #ifdef MY_DEBUG Serial.println("JalousieFahren - END"); #endif } ///////////////////////////////////////////////////////////////////////////////////////////////////// void loop() { #ifdef MY_DEBUG Serial.println(); Serial.println("LOOP - BEGIN"); #endif for (byte i = 1; i <= AnzahlRaeume; i++) { #ifdef MY_DEBUG Serial.print('RaumNummer / Kommando: '); Serial.print(' '); Serial.print(i); Serial.print(' / '); Serial.println(Jalousien[i-1].Command); #endif if (Jalousien[i - 1].Command != 0) { JalousieBewegen(Jalousien[i - 1].RaumNummer, Jalousien[i - 1].Command); //RaumNummer, Kommando Jalousien[i - 1].Command = 0; } } #ifdef MY_DEBUG Serial.println(); Serial.println("LOOP - END"); wait(4000); #endif } //////////////////////////////////////////////////////////////////////////////// void receive(const MyMessage &IncomingMessage) { String Payload; Payload = IncomingMessage.getString(); #ifdef MY_DEBUG Serial.println(); Serial.println("RECEIVE - BEGIN"); Serial.println(); Serial.println("Nachricht empfangen"); Serial.print("f�r Sensor: "); Serial.println(IncomingMessage.sensor); Serial.print("Typ: "); Serial.println(IncomingMessage.type); Serial.print("Sender: "); Serial.println(IncomingMessage.sender); Serial.print("Command: "); Serial.println(IncomingMessage.getCommand() + "(1 = SET, 2 = REQUEST)"); Serial.print("IsAcknowledge: "); Serial.println(IncomingMessage.isAck()); Serial.print("Payload als String: "); Serial.println(Payload); Serial.print("Message data: "); Serial.println(IncomingMessage.data); #endif // Eingehendes Kommando: if (IncomingMessage.destination == MY_NODE_ID && IncomingMessage.getCommand() == C_SET ) //Wert fuer ein Child soll gesetzt werden! { Jalousien[IncomingMessage.sensor - 1].Command = IncomingMessage.type; // �ndere Command f�r % AUF/AB auf jeweils 0%, 100% bzw. STOP: if ( IncomingMessage.type == V_PERCENTAGE and Payload == "0") { Jalousien[IncomingMessage.sensor - 1].Command = V_UP; //29 }; if ( IncomingMessage.type == V_PERCENTAGE and Payload == "100") { Jalousien[IncomingMessage.sensor - 1].Command = V_DOWN; //30 }; if ( IncomingMessage.type == V_PERCENTAGE and Payload == "STOP") { Jalousien[IncomingMessage.sensor - 1].Command = V_STOP; //31 }; //�ndere Command f�r TILT-AUF/TILT-AB jeweils mit 0%, 100% und STOP: if ( IncomingMessage.type == V_VAR1 and ( Payload == "0" || Payload == "UP" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_UP; //90 TILT-UP }; if ( IncomingMessage.type == V_VAR1 and ( Payload == "100" || Payload == "DOWN" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_DOWN; //91 TILT-DOWN }; if ( IncomingMessage.type == V_VAR1 and Payload == "STOP") { Jalousien[IncomingMessage.sensor - 1].Command = V_STOP; //31 }; //�ndere Command f�r 3xTILT-AUF/3xTILT-AB jeweils mit 0%, 100% und STOP: if ( IncomingMessage.type == V_VAR2 and ( Payload == "0" || Payload == "UP" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_UP3; //92 3xTILT-UP }; if ( IncomingMessage.type == V_VAR2 and ( Payload == "100" || Payload == "DOWN" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_DOWN3; //93 3xTILT-DOWN }; if ( IncomingMessage.type == V_VAR2 and Payload == "STOP") { Jalousien[IncomingMessage.sensor - 1].Command = V_STOP; //31 }; #ifdef MY_DEBUG Serial.print("Aus Message-Type abgeleitetes Jalousie-Kommando: "); Serial.println(Jalousien[IncomingMessage.sensor - 1].Command); Serial.println(); #endif } // Eingehende Anfrage: if (IncomingMessage.destination == MY_NODE_ID && IncomingMessage.getCommand() == C_REQ ) //Wert fuer ein Child wird abgefragt! { for (byte i = 1; i <= AnzahlRaeume; i++) { if (i == IncomingMessage.sensor) { if (IncomingMessage.type == V_VAR3 || IncomingMessage.type == V_VAR4) { send(Jalousien[i - 1].MessageStatusAufAb.set(Jalousien[i - 1].StatusAufAb, 1), false); send(Jalousien[i - 1].MessageStatusTilt.set(Jalousien[i - 1].StatusTilt, 1), false); } } } } #ifdef MY_DEBUG Serial.println("RECEIVE - END"); #endif } -
Hello.
I hope someone can help me with an issue I'm facing while using mySensors binding for rolling shutters and using V_VAR channels.
My Setup:
Software:
openHAB 2.5.5 stable release
MySensors openHAB binding 2.5.0.202002161928
Hardware:
MySensors Ethernet gateway
Rollershutters with functions UP/DOWN and TILT UP/TILT DOWN (7 TILT positions, like horizontal blinds) (no KNX!)The plan:
Whenever openHAB starts I want openHAB to request the status of my rollershutter positions (UP or DOWN) and blind positions (1/7, 2/7 ... 7/7).
Whenever the rollershutter position or blind position changes the node is supposed to send the new status to the controller/openHAB.Implementation:
On the mySensors node I keep variables for rollershutter positions (0% = open to 100% = closed) and tilt-position (1/7 = min tilt to 7/7 fully tilt).
The node sends both positions either when a command has been executed to change them (UP/DOWN or TILT-UP/TILT-DOWN) or when the controller requests them (via request command = message type = C_REQ).
I've implemented an openHAB rule which priodically (for testing purposes every minute) requests the positions of the rollershutters and blind-position from the node, the node responds with both positions using V_VAR3 (rollershutter position) and V_VAR4 (tilt position).
These requests cprrectly arrive at the node and the node responds with its position-values.Problem:
When replying with the rollershutter position to the openhab rule request with e.g. 100 I get error "value must be between 0 and 100.
When replying with the tilt position to the openhab rule request with e.g. 1 (for 1/7) or 0.14 (for 1/7th) the openHAB log shows error "value must be between 0 and 100.
Whenever the node sends values 0 or 1 openhab accepts the values!What I tried so far:
I assumed openHAB expects a percent value hence requiring a value between 0 and 1 (even though it says it must be between 0 and 100) so I tried to adjust my mySensors code to send decimals bt. 0 and 1 to represent values bt. 0 and 100 (percent) - no luck though!
The log only shows 1.0 or 0.0 being received from node eventhough the node sends float(shutter position) / 100.0 for rollershutter position or float(tilt position) / 7.0 for tilt position.
I've tried different formatting in the items file ([%.2f], [%d], none and many others) - no help!Is it possible that there is a bug in the binding implementation of V_VAR1 to V_VAR4 ?
It seems to only accept values 0 and 1 for the V_VAR channels.
Is it me? Am I missing anything here?Any help is highly appreciated!
Thanks,
Ralph...Things:
Bridge mysensors:bridge-eth:gateway @ "Wohnzimmer" [ ipAddress="10.0.0.11", tcpPort=5003, startupCheckEnabled=true, imperial=false, sendDelay=200, networkSanCheckSendHeartbeat=false, networkSanCheckInterval=3, networkSanCheckSendHeartbeatFailAttempts=10, networkSanCheckEnabled=true, networkSanCheckConnectionFailAttempts=3 ] { cover BueroRalphJalousie "Jalousie" @ "Büro Ralph" [ nodeId=7, childId=4, requestAck=false ] }Items:
Rollershutter BueroRalphJalousieAufAb "Auf/ab" { channel="mysensors:cover:gateway:BueroRalphJalousie:cover" } Number BueroRalphJalousieStatusAufAb "Status Auf/ab [%d]" { channel="mysensors:cover:gateway:BueroRalphJalousie:var3" } Number BueroRalphJalousieStatusTilt "Status Tilt [%.2f]" { channel="mysensors:cover:gateway:BueroRalphJalousie:var4" }Rule:
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// // Stati von Node erfragen: rule HoleUnbekannteStati when Time cron "0 0/1 * 1/1 * ? *" //alle 1 Minuten then // Jalousiesteuerung - UG: if ( BueroRalphJalousieStatusAufAb.state == NULL || BueroRalphJalousieStatusTilt.state == NULL ) { // make the node send in positions for rollershutters and blinds (yes it sends both even though only one (V_VAR3) is being requested!): sendCommand(mySMsg01, "7;4;2;0;26"); //erfrage Jalousie-AufAb-Status Buero Ralph von Node 7, Child 4, 2=request, 0 = kein acknowlege, 26 = V_VAR3 if ( DebugLogger.state == ON ) { logInfo( "Jalousien.Rules.HoleUnbekannteStati", "Jalousie-Stati Buero Ralph werden von Node erfragt") } } endmySensors code (excerpt):
void receive(const MyMessage &IncomingMessage) { // Eingehende Anfrage: if (IncomingMessage.destination == MY_NODE_ID && IncomingMessage.getCommand() == C_REQ ) //Wert fuer ein Child wird abgefragt! { for (byte i = 1; i <= AnzahlRaeume; i++) { if (i == IncomingMessage.sensor) { if (IncomingMessage.type == V_VAR3 || IncomingMessage.type == V_VAR4) { send(Jalousien[i - 1].MessageStatusAufAb.set(Jalousien[i - 1].StatusAufAb, 1), false); send(Jalousien[i - 1].MessageStatusTilt.set(Jalousien[i - 1].StatusTilt, 1), false); } } } } }mySensors code (full copy):
#include <Arduino.h> //#define MY_DEBUG #define MY_RADIO_RF24 #define MY_NODE_ID 7 #define MY_REPEATER_FEATURE #include <MySensors.h> #define MY_RF24_PA_LEVEL RF24_PA_HIGH //#define ACTIVE_LOW // comment out this line if your relays are active high #ifdef ACTIVE_LOW #define BitShiftRelaisNummer ~(1U << (RelaisNummer-1)) #define AlleRelaisAus 0xFFFF #else #define BitShiftRelaisNummer (1U << (RelaisNummer-1)) #define AlleRelaisAus 0U #endif int RelaisNummer; #define AnzahlRaeume 8 // Anzahl der Raeume //Setup Shift Register: const int clockPin = 4; const int outputEnablePin = 6; const int dataPin = 7; const int latchPin = 8; typedef enum { V_TILT_UP = 90, V_TILT_DOWN = 91, V_TILT_UP3 = 92, V_TILT_DOWN3 = 93, } custom_mysensors_data_t; typedef struct Jalousie { uint8_t RaumNummer; char *RaumName; int RelaisNummerAuf; int RelaisNummerAb; int Fahrzeit; int TiltSchritte; int Command; uint8_t StatusAufAb; // (0=UP, 100=DOWN, 99=unknown), StatusTilt (0=UP) uint8_t StatusTilt; // (0=OPEN, 7=CLOSE, 9=unknown), StatusTilt (0=UP) MyMessage MessageStatusAufAb; MyMessage MessageStatusTilt; } JalousieTyp; JalousieTyp Jalousien[AnzahlRaeume] = //RaumNummer, RaumName, RalaisNummer Funktion "AUF", RelaisNummer Funktion "AB", Fahrzeit in Sek., TiltSchritte, Command, StatusAufAb (0=UP, 100=DOWN, 99=unknown), StatusTilt (0=UP, 100=DOWN, 99=unknown) { { 1, "Büro Christine", 1, 2, 45, 7, 0, 99, 0 }, { 2, "Spielzimmer", 3, 4, 65, 7, 0, 99, 0 }, { 3, "Nebenküche", 5, 6, 45, 7, 0, 99, 0 }, { 4, "Büro Ralph", 7, 8, 45, 7, 0, 99, 0 }, { 5, "Esszimmer", 9, 10, 65, 7, 0, 99, 0 }, { 6, "Wohnzimmer Terrasse", 11, 12, 65, 7, 0, 99, 0 }, { 7, "Wohnzimmer Garten", 13, 14, 65, 7, 0, 99, 0 }, { 8, "Küche", 15, 16, 65, 7, 0, 99, 0 } }; //////////////////////////////////////////////////////////////////////////////// void setup() { #ifdef DEBUG_ON Serial.println(); Serial.println("SETUP - BEGIN"); #endif // BitShiftRegister vorbereiten: pinMode(latchPin, OUTPUT); pinMode(clockPin, OUTPUT); pinMode(dataPin, OUTPUT); pinMode(outputEnablePin, OUTPUT); digitalWrite(outputEnablePin, LOW); // BitShiftRegister auf "alles aus" schalten: digitalWrite(latchPin, LOW); //DatenPipeline fuer BitShiftRegister "lahm" legen shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); //DatenPipeline in das BitShiftRegister laden: shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); digitalWrite(latchPin, HIGH); //neue Daten im BitShiftRegister aktivieren: // Jalousie-Messages vorbereiten: #ifdef DEBUG_ON Serial.println(); Serial.println("RaumNummer, RelaisName, RelaisNr-AUF, RelaisNr-AB, Fahrzeit, Command, StatusAufAb, StatusTilt"); #endif for (byte i = 1; i <= AnzahlRaeume; i++) { Jalousien[i - 1].MessageStatusAufAb.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusAufAb.setType(V_VAR3); Jalousien[i - 1].MessageStatusTilt.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusTilt.setType(V_VAR4); #ifdef DEBUG_ON Serial.println(Jalousien[i - 1].RaumNummer + ", " + Jalousien[i - 1].RaumName, + ", " + Jalousien[i - 1].RelaisNummerAuf + ", " + Jalousien[i - 1].RelaisNummerAb + ", " + Jalousien[i - 1].Fahrzeit + ", " + Jalousien[i - 1].Command + ", " + Jalousien[i - 1].StatusAuf + ", " + Jalousien[i - 1].StatusAb); #endif } #ifdef MY_DEBUG Serial.println(); Serial.println("SETUP - END"); #endif } ////////////////////////////////////////////////////////////////////////////////////// void presentation() { #ifdef MY_DEBUG Serial.println(); Serial.println("PRESENTATION - BEGIN"); #endif sendSketchInfo("Jalousie-Controller EG", "1.1"); for (byte i = 1; i <= AnzahlRaeume; i++) { present(Jalousien[i - 1].RaumNummer, S_COVER, Jalousien[i - 1].RaumName, false); //Jalousie } #ifdef MY_DEBUG Serial.println(); Serial.println("PRESENTATION - END"); #endif } ////////////////////////////////////////////////////////////////////////////// void JalousieBewegen(int RaumNummer, uint8_t Command) { const int DauerTilt = 150; const int DauerFahren = 1100; int Signaldauer = DauerTilt; int cycles = 1; #ifdef MY_DEBUG Serial.println(); Serial.println("JalousieFahren - BEGIN"); Serial.print("Command: "); Serial.println(Command); #endif // RelaisNummer (Funktion also AUF- oder AB-Relais) ermitteln und Signaldauer (Fahren oder TILT) festlegen: switch (Command) { case V_UP: RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; Signaldauer = DauerFahren; Jalousien[RaumNummer - 1].StatusAufAb = 0; Jalousien[RaumNummer - 1].StatusTilt = 0; break; case V_DOWN: RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAb; Signaldauer = DauerFahren; Jalousien[RaumNummer - 1].StatusAufAb = 100; Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].TiltSchritte; break; case V_STOP: RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; Jalousien[RaumNummer - 1].StatusAufAb = 99; break; case V_PERCENTAGE: // Hole Prozentsatz (0-100 oder STOP): // to be implemented RelaisNummer = 0; break; case V_TILT_UP: //90 TILT-UP RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; if (Jalousien[RaumNummer - 1].StatusTilt >= cycles) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt - cycles; } break; case V_TILT_DOWN: //"91 TILT-DOWN" RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAb; if (Jalousien[RaumNummer - 1].StatusTilt <= ( Jalousien[RaumNummer - 1].TiltSchritte - cycles )) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt + 1; } break; case V_TILT_UP3: //"92 TILT-UP3" RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAuf; cycles = 3; if (Jalousien[RaumNummer - 1].StatusTilt >= cycles) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt - cycles; } break; case V_TILT_DOWN3: //"93 TILT-DOWN3" RelaisNummer = Jalousien[RaumNummer - 1].RelaisNummerAb; cycles = 3; if (Jalousien[RaumNummer - 1].StatusTilt <= (Jalousien[RaumNummer - 1].TiltSchritte - cycles)) { Jalousien[RaumNummer - 1].StatusTilt = Jalousien[RaumNummer - 1].StatusTilt + cycles; } break; }; #ifdef MY_DEBUG Serial.print("Raumnummer: "); Serial.println(RaumNummer); Serial.print("JalousieRelaisNummer: "); Serial.println(RelaisNummer); Serial.print("BitShift-Relais-Nummer: "); Serial.println(BitShiftRelaisNummer); #endif // Relais (FunktionsNummer) fuer Signaldauer schalten: if (RelaisNummer != 0) { for (int i = 1; i <= cycles; i++) { // Relais einschalten: #ifdef MY_DEBUG Serial.println("Schaltet ein"); #endif digitalWrite(latchPin, LOW); //DatenPipeline fuer BitShiftRegister "lahm" legen shiftOut(dataPin, clockPin, MSBFIRST, highByte(BitShiftRelaisNummer)); //DatenPipeline in das BitShiftRegister laden shiftOut(dataPin, clockPin, MSBFIRST, lowByte(BitShiftRelaisNummer)); digitalWrite(latchPin, HIGH); //neue Daten im BitShiftRegister aktivieren // Relais "gedrueckt" lassen: #ifdef MY_DEBUG Serial.print("wartet "); Serial.print(Signaldauer); Serial.println(" ms"); #endif wait(Signaldauer); // Relais ausschalten: #ifdef MY_DEBUG Serial.println("Schaltet aus"); #endif digitalWrite(latchPin, LOW); //DatenPipeline fuer BitShiftRegister "lahm" legen shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); //DatenPipeline in das BitShiftRegister laden shiftOut(dataPin, clockPin, MSBFIRST, AlleRelaisAus); //doppelt??? digitalWrite(latchPin, HIGH); //neue Daten im BitShiftRegister aktivieren if (cycles > 1) { wait(750); } } } // Neuen Zustand an Controller melden: send(Jalousien[RaumNummer - 1].MessageStatusAufAb.set(Jalousien[RaumNummer - 1].StatusAufAb, 1), false); send(Jalousien[RaumNummer - 1].MessageStatusTilt.set(Jalousien[RaumNummer - 1].StatusTilt, 1), false); #ifdef MY_DEBUG Serial.println("JalousieFahren - END"); #endif } ///////////////////////////////////////////////////////////////////////////////////////////////////// void loop() { #ifdef MY_DEBUG Serial.println(); Serial.println("LOOP - BEGIN"); #endif for (byte i = 1; i <= AnzahlRaeume; i++) { #ifdef MY_DEBUG Serial.print('RaumNummer / Kommando: '); Serial.print(' '); Serial.print(i); Serial.print(' / '); Serial.println(Jalousien[i-1].Command); #endif if (Jalousien[i - 1].Command != 0) { JalousieBewegen(Jalousien[i - 1].RaumNummer, Jalousien[i - 1].Command); //RaumNummer, Kommando Jalousien[i - 1].Command = 0; } } #ifdef MY_DEBUG Serial.println(); Serial.println("LOOP - END"); wait(4000); #endif } //////////////////////////////////////////////////////////////////////////////// void receive(const MyMessage &IncomingMessage) { String Payload; Payload = IncomingMessage.getString(); #ifdef MY_DEBUG Serial.println(); Serial.println("RECEIVE - BEGIN"); Serial.println(); Serial.println("Nachricht empfangen"); Serial.print("f�r Sensor: "); Serial.println(IncomingMessage.sensor); Serial.print("Typ: "); Serial.println(IncomingMessage.type); Serial.print("Sender: "); Serial.println(IncomingMessage.sender); Serial.print("Command: "); Serial.println(IncomingMessage.getCommand() + "(1 = SET, 2 = REQUEST)"); Serial.print("IsAcknowledge: "); Serial.println(IncomingMessage.isAck()); Serial.print("Payload als String: "); Serial.println(Payload); Serial.print("Message data: "); Serial.println(IncomingMessage.data); #endif // Eingehendes Kommando: if (IncomingMessage.destination == MY_NODE_ID && IncomingMessage.getCommand() == C_SET ) //Wert fuer ein Child soll gesetzt werden! { Jalousien[IncomingMessage.sensor - 1].Command = IncomingMessage.type; // �ndere Command f�r % AUF/AB auf jeweils 0%, 100% bzw. STOP: if ( IncomingMessage.type == V_PERCENTAGE and Payload == "0") { Jalousien[IncomingMessage.sensor - 1].Command = V_UP; //29 }; if ( IncomingMessage.type == V_PERCENTAGE and Payload == "100") { Jalousien[IncomingMessage.sensor - 1].Command = V_DOWN; //30 }; if ( IncomingMessage.type == V_PERCENTAGE and Payload == "STOP") { Jalousien[IncomingMessage.sensor - 1].Command = V_STOP; //31 }; //�ndere Command f�r TILT-AUF/TILT-AB jeweils mit 0%, 100% und STOP: if ( IncomingMessage.type == V_VAR1 and ( Payload == "0" || Payload == "UP" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_UP; //90 TILT-UP }; if ( IncomingMessage.type == V_VAR1 and ( Payload == "100" || Payload == "DOWN" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_DOWN; //91 TILT-DOWN }; if ( IncomingMessage.type == V_VAR1 and Payload == "STOP") { Jalousien[IncomingMessage.sensor - 1].Command = V_STOP; //31 }; //�ndere Command f�r 3xTILT-AUF/3xTILT-AB jeweils mit 0%, 100% und STOP: if ( IncomingMessage.type == V_VAR2 and ( Payload == "0" || Payload == "UP" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_UP3; //92 3xTILT-UP }; if ( IncomingMessage.type == V_VAR2 and ( Payload == "100" || Payload == "DOWN" ) ) { Jalousien[IncomingMessage.sensor - 1].Command = V_TILT_DOWN3; //93 3xTILT-DOWN }; if ( IncomingMessage.type == V_VAR2 and Payload == "STOP") { Jalousien[IncomingMessage.sensor - 1].Command = V_STOP; //31 }; #ifdef MY_DEBUG Serial.print("Aus Message-Type abgeleitetes Jalousie-Kommando: "); Serial.println(Jalousien[IncomingMessage.sensor - 1].Command); Serial.println(); #endif } // Eingehende Anfrage: if (IncomingMessage.destination == MY_NODE_ID && IncomingMessage.getCommand() == C_REQ ) //Wert fuer ein Child wird abgefragt! { for (byte i = 1; i <= AnzahlRaeume; i++) { if (i == IncomingMessage.sensor) { if (IncomingMessage.type == V_VAR3 || IncomingMessage.type == V_VAR4) { send(Jalousien[i - 1].MessageStatusAufAb.set(Jalousien[i - 1].StatusAufAb, 1), false); send(Jalousien[i - 1].MessageStatusTilt.set(Jalousien[i - 1].StatusTilt, 1), false); } } } } #ifdef MY_DEBUG Serial.println("RECEIVE - END"); #endif }I missed to append the log excerpt with the error message:
2020-05-26 10:21:35.268 [DEBUG] [rs.internal.gateway.MySensorsGateway] - Child 4 found in node 7 2020-05-26 10:21:35.273 [DEBUG] [ensors.handler.MySensorsThingHandler] - **Updating channel: var4(V_VAR4) value to: 3** 2020-05-26 10:21:35.277 [ERROR] [nternal.event.MySensorsEventRegister] - Event broadcasting throw an exception java.lang.IllegalArgumentException: **Value must be between 0 and 100** at org.eclipse.smarthome.core.library.types.PercentType.validateValue(PercentType.java:57) ~[?:?] at org.eclipse.smarthome.core.library.types.PercentType.<init>(PercentType.java:52) ~[?:?] at org.eclipse.smarthome.core.library.types.DecimalType.as(DecimalType.java:152) ~[?:?] at org.eclipse.smarthome.core.internal.items.ItemStateConverterImpl.convertToAcceptedState(ItemStateConverterImpl.java:64) ~[?:?] at org.eclipse.smarthome.core.thing.internal.profiles.ProfileCallbackImpl.sendUpdate(ProfileCallbackImpl.java:134) ~[?:?] at org.eclipse.smarthome.core.thing.internal.profiles.SystemDefaultProfile.onStateUpdateFromHandler(SystemDefaultProfile.java:53) ~[?:?] at org.eclipse.smarthome.core.thing.internal.CommunicationManager.lambda$9(CommunicationManager.java:467) ~[?:?] at org.eclipse.smarthome.core.thing.internal.CommunicationManager.lambda$11(CommunicationManager.java:487) ~[?:?] at java.lang.Iterable.forEach(Iterable.java:75) ~[?:1.8.0_252] at org.eclipse.smarthome.core.thing.internal.CommunicationManager.handleCallFromHandler(CommunicationManager.java:483) ~[?:?] at org.eclipse.smarthome.core.thing.internal.CommunicationManager.stateUpdated(CommunicationManager.java:465) ~[?:?] at org.eclipse.smarthome.core.thing.internal.ThingManagerImpl$1.stateUpdated(ThingManagerImpl.java:168) ~[?:?] at org.eclipse.smarthome.core.thing.binding.BaseThingHandler.updateState(BaseThingHandler.java:245) ~[?:?] at org.eclipse.smarthome.core.thing.binding.BaseThingHandler.updateState(BaseThingHandler.java:264) ~[?:?] at org.openhab.binding.mysensors.handler.MySensorsThingHandler.handleChildUpdateEvent(MySensorsThingHandler.java:305) ~[?:?] at org.openhab.binding.mysensors.handler.MySensorsThingHandler.sensorUpdateEvent(MySensorsThingHandler.java:221) ~[?:?] at org.openhab.binding.mysensors.internal.event.MySensorsEventRegister.lambda$4(MySensorsEventRegister.java:130) ~[?:?] at java.lang.Iterable.forEach(Iterable.java:75) ~[?:1.8.0_252] at org.openhab.binding.mysensors.internal.event.MySensorsEventRegister.notifyNodeUpdateEvent(MySensorsEventRegister.java:126) ~[?:?] at org.openhab.binding.mysensors.internal.gateway.MySensorsGateway.handleSetReqMessage(MySensorsGateway.java:564) ~[?:?] at org.openhab.binding.mysensors.internal.gateway.MySensorsGateway.handleIncomingMessage(MySensorsGateway.java:462) ~[?:?] at org.openhab.binding.mysensors.internal.gateway.MySensorsGateway.messageReceived(MySensorsGateway.java:375) ~[?:?] at org.openhab.binding.mysensors.internal.event.MySensorsEventRegister.lambda$1(MySensorsEventRegister.java:87) ~[?:?] at java.lang.Iterable.forEach(Iterable.java:75) [?:1.8.0_252] at org.openhab.binding.mysensors.internal.event.MySensorsEventRegister.notifyMessageReceived(MySensorsEventRegister.java:83) [bundleFile:?] at org.openhab.binding.mysensors.internal.protocol.MySensorsAbstractConnection$MySensorsReader.run(MySensorsAbstractConnection.java:362) [bundleFile:?] at java.util.concurrent.Executors$RunnableAdapter.call(Executors.java:511) [?:1.8.0_252] at java.util.concurrent.FutureTask.run(FutureTask.java:266) [?:1.8.0_252] at java.util.concurrent.ThreadPoolExecutor.runWorker(ThreadPoolExecutor.java:1149) [?:1.8.0_252] at java.util.concurrent.ThreadPoolExecutor$Worker.run(ThreadPoolExecutor.java:624) [?:1.8.0_252] at java.lang.Thread.run(Thread.java:748) [?:1.8.0_252] -
It's getting more and more wierd:
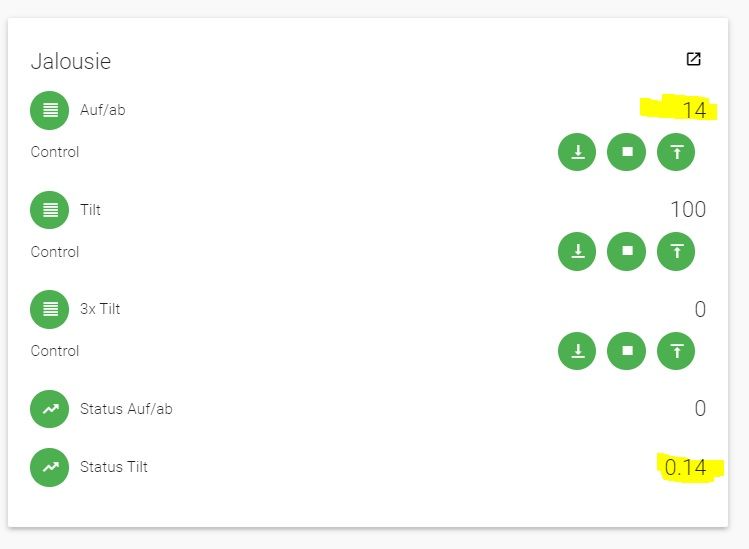
Just changed the mySensors code to send a fixed value e.g. 0.14 on V_VAR4send(Jalousien[i - 1].MessageStatusTilt.set(float(0.14), 2), false);Result in openHAB is that the rollershutter value shows as 14 and the item connected to channel VAR4 shows as 0.14 (see screen shot).
Apprently all the VAR channels are connected to the cover channel in the openHAB mySensors binding.
That doesn't seem correct to me.
??
-
Solved it by changing the definition (typeId) of both V_VAR1 and V_VAR2 in the binding file for S_Cover (.XML file in folder /usr/share/openhab -> org.openhab.binding.mysensors-2.5.0-SNAPSHOT.jar -> ESH-INF/thing/S_Cover.xml) from "var1-channel" resp. "var2-channel" to "cover-channel" (see XML excerpt below).
This allows me to setup two additional rollershutter items to control the tilt of the cover blade (V_VAR1 = single tilt and V_VAR2 = tripple tilt at a time) and to send back the position of the tilt blades stored in the node to openHAB.Items:
Rollershutter BueroRalphJalousieAufAb "Auf/ab" { channel="mysensors:cover:gateway:BueroRalphJalousie:cover", Rollershutter BueroRalphJalousieTilt "Tilt" { channel="mysensors:cover:gateway:BueroRalphJalousie:var1" } Rollershutter BueroRalphJalousieTilt3X "3x Tilt" { channel="mysensors:cover:gateway:BueroRalphJalousie:var2" }**Binding .XML file in folder /usr/share/openhab -> org.openhab.binding.mysensors-2.5.0-SNAPSHOT.jar -> ESH-INF/thing/S_Cover.xml
I changed from:<channel id="var1" typeId="var1-channel" /> <channel id="var2" typeId="var2-channel" />**to
<channel id="var1" typeId="cover-channel" /> <channel id="var2" typeId="cover-channel" />like this:
<thing:thing-descriptions bindingId="mysensors" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xmlns:thing="https://openhab.org/schemas/thing-description/v1.0.0" xsi:schemaLocation="https://openhab.org/schemas/thing-description/v1.0.0 https://openhab.org/schemas/thing-description-1.0.0.xsd"> <thing-type id="cover"> <supported-bridge-type-refs> <bridge-type-ref id="bridge-ser" /> <bridge-type-ref id="bridge-eth" /> <bridge-type-ref id="bridge-mqtt" /> </supported-bridge-type-refs> <label>RollerShutter</label> <description>RollerShutter</description> <channels> <channel id="cover" typeId="cover-channel" /> <channel id="var1" typeId="cover-channel" /> <channel id="var2" typeId="cover-channel" /> <channel id="var3" typeId="var3-channel" /> <channel id="var4" typeId="var4-channel" /> <channel id="var5" typeId="var5-channel" /> <channel id="battery" typeId="battery-channel" /> <channel id="lastupdate" typeId="lastupdate-channel" /> </channels> <config-description> <parameter name="nodeId" typ...mySensors code (excerpt):
// Prepare Messages: Jalousien[i - 1].MessageStatusAufAb.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusAufAb.setType(V_PERCENTAGE); //UpDown-Position Jalousien[i - 1].MessageStatusTilt.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusTilt.setType(V_VAR1); //Tilt-Position Jalousien[i - 1].MessageStatusTilt3X.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusTilt3X.setType(V_VAR2); //Tilt3x-Position ... ... // Neuen Zustand an Controller melden / Send cover and tilt positions back to controller: send(Jalousien[i - 1].MessageStatusTilt.set((Jalousien[i - 1].StatusTilt / Jalousien[i - 1].TiltSchritte), 2), false); send(Jalousien[i - 1].MessageStatusTilt3X.set((Jalousien[i - 1].StatusTilt / Jalousien[i - 1].TiltSchritte), 2), false); send(Jalousien[i - 1].MessageStatusAufAb.set(Jalousien[i - 1].StatusAufAb, 0), false);Make sure to send the V_PERCENTAGE last since V_VAR1 and V_VAR2 for some unknown reason (and as far as I feel totally unnecessarily) still updates V_PERCENTAGE!
Result:
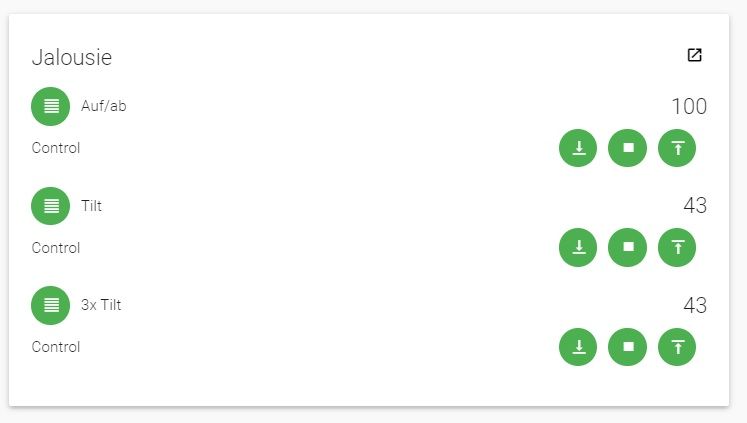
-
Solved it by changing the definition (typeId) of both V_VAR1 and V_VAR2 in the binding file for S_Cover (.XML file in folder /usr/share/openhab -> org.openhab.binding.mysensors-2.5.0-SNAPSHOT.jar -> ESH-INF/thing/S_Cover.xml) from "var1-channel" resp. "var2-channel" to "cover-channel" (see XML excerpt below).
This allows me to setup two additional rollershutter items to control the tilt of the cover blade (V_VAR1 = single tilt and V_VAR2 = tripple tilt at a time) and to send back the position of the tilt blades stored in the node to openHAB.Items:
Rollershutter BueroRalphJalousieAufAb "Auf/ab" { channel="mysensors:cover:gateway:BueroRalphJalousie:cover", Rollershutter BueroRalphJalousieTilt "Tilt" { channel="mysensors:cover:gateway:BueroRalphJalousie:var1" } Rollershutter BueroRalphJalousieTilt3X "3x Tilt" { channel="mysensors:cover:gateway:BueroRalphJalousie:var2" }**Binding .XML file in folder /usr/share/openhab -> org.openhab.binding.mysensors-2.5.0-SNAPSHOT.jar -> ESH-INF/thing/S_Cover.xml
I changed from:<channel id="var1" typeId="var1-channel" /> <channel id="var2" typeId="var2-channel" />**to
<channel id="var1" typeId="cover-channel" /> <channel id="var2" typeId="cover-channel" />like this:
<thing:thing-descriptions bindingId="mysensors" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xmlns:thing="https://openhab.org/schemas/thing-description/v1.0.0" xsi:schemaLocation="https://openhab.org/schemas/thing-description/v1.0.0 https://openhab.org/schemas/thing-description-1.0.0.xsd"> <thing-type id="cover"> <supported-bridge-type-refs> <bridge-type-ref id="bridge-ser" /> <bridge-type-ref id="bridge-eth" /> <bridge-type-ref id="bridge-mqtt" /> </supported-bridge-type-refs> <label>RollerShutter</label> <description>RollerShutter</description> <channels> <channel id="cover" typeId="cover-channel" /> <channel id="var1" typeId="cover-channel" /> <channel id="var2" typeId="cover-channel" /> <channel id="var3" typeId="var3-channel" /> <channel id="var4" typeId="var4-channel" /> <channel id="var5" typeId="var5-channel" /> <channel id="battery" typeId="battery-channel" /> <channel id="lastupdate" typeId="lastupdate-channel" /> </channels> <config-description> <parameter name="nodeId" typ...mySensors code (excerpt):
// Prepare Messages: Jalousien[i - 1].MessageStatusAufAb.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusAufAb.setType(V_PERCENTAGE); //UpDown-Position Jalousien[i - 1].MessageStatusTilt.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusTilt.setType(V_VAR1); //Tilt-Position Jalousien[i - 1].MessageStatusTilt3X.setSensor(Jalousien[i - 1].RaumNummer); //ChildID Jalousien[i - 1].MessageStatusTilt3X.setType(V_VAR2); //Tilt3x-Position ... ... // Neuen Zustand an Controller melden / Send cover and tilt positions back to controller: send(Jalousien[i - 1].MessageStatusTilt.set((Jalousien[i - 1].StatusTilt / Jalousien[i - 1].TiltSchritte), 2), false); send(Jalousien[i - 1].MessageStatusTilt3X.set((Jalousien[i - 1].StatusTilt / Jalousien[i - 1].TiltSchritte), 2), false); send(Jalousien[i - 1].MessageStatusAufAb.set(Jalousien[i - 1].StatusAufAb, 0), false);Make sure to send the V_PERCENTAGE last since V_VAR1 and V_VAR2 for some unknown reason (and as far as I feel totally unnecessarily) still updates V_PERCENTAGE!
Result:
@syntacrsc good job man
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login