[Tutorial] openHAB with serial gateway
-
Hi ,
I think the problem is this msg 3;255;4;0;0;FFFFFFFFFFFFFFFF0300 is this something with the OTA firmware? i think the rule dont recognise this msg and give an error (Error during the execution of rule 'Decode incoming MySensors data': 5). Can the author of the rule please confirm if this it the problem of the error??
@nikos1671 In case of unhandled messages (when there is no openhab item assigned to this
nodeID;childID;-combination in yoursensorToItemsMap), they will just be ignored (and print thedatafield).
This happens here in the code: https://gist.github.com/gersilex/13f39b3419427b35636a#file-default-rules-L211This will look like this:
3;255;4;0;0;FFFFFFFFFFFFFFFF0300 No item matches nodeId=3, childId=255. Data received: FFFFFFFFFFFFFFFF0300However, this was never tested with debugging enabled on the Gateway. This is why I asked you to disable debugging and recompile/reupload the code to your gateway arduino without the DEBUG flag inside
MyConfig.h.There is a know problem which is not catched currently:
- Data can only be decoded, if the String has exactly 6 fields, seperated by a semicolon.
Please go and try to disable the DEBUG on your gateway arduino.
-
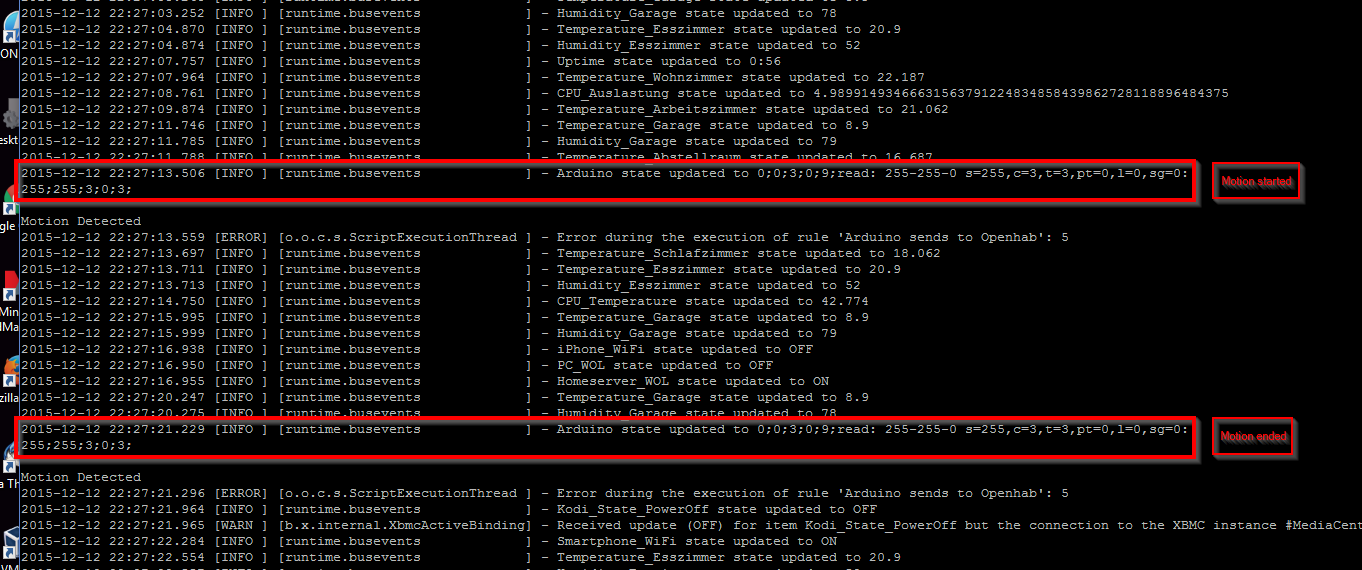
Can someone help me? I want to integrate a motion sensor in OpenHAB but I don't know how to distinguish between the motion start and end. here's my openhab console log:
-
Can somebody help..?
-
Try removing DEBUG in the Serial GW and review messages.
I receive a 0 or 1 depending if the motion is detected or the sensor is resetting to normal status.
@Dave-Dan i tried it, but the motion sensor is still sending only zero's.... even if it is not triggered.
I got these motion sensors: http://www.amazon.de/Pyroelectrische-Infrarot-Bewegung-Sensor-Detektor/dp/B008AESDSY/ -
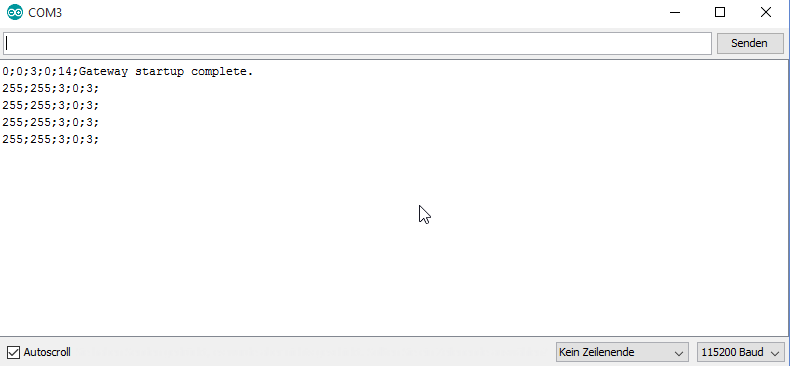
When I look at the serial monitor output for my motion sensor, it clearly gives me a "0" or "1" depending if movement is detected or not.
But when I look at the serial monitor of my gateway, it only receives the same message no matter if motion started (motion sensor serial monitor: 1) or ended (motion sensor serial monitor: 0)
-
@HenryWhite The node is requesting for an id and not sending any status. You'll need to define a static id in the sketch of your node:
http://www.mysensors.org/download/sensor_api_15#the-full-api
Look for "Starting up the library" and the "begin()" function.
-
@HenryWhite The node is requesting for an id and not sending any status. You'll need to define a static id in the sketch of your node:
http://www.mysensors.org/download/sensor_api_15#the-full-api
Look for "Starting up the library" and the "begin()" function.
@TimO thank you so much! it works now. Any idea why i had to assign a static id? i thought the gateway should tell the node a dynamic id automatically..
-
@HenryWhite You're welcome. The id is assigned by the controller, in your case OpenHAB. There is a post in the forum about how to add a rule for id assignment, but I don't use it myself.
-
I have a real noob question, and I am way better with the electronics that I am the software. I can see my motion detector show up in my gateway, and in the events.log, so I know that I am getting to the Raspberry Pi I deployed opneHAB on.
Here's some detail:
So I have build the MySensors.org motion detector (and a separate temp/humidity sensor), loaded up the NRF24l01+ and PIR.
I created a gateway out of a nano with NRF24l01+.
I followed the tutorial on how to do the serial bindings.
I see in the terminal window runtime.busevents that the motion detector is detecting movement, and later changing back to 0, along with the other sensor I have, which is the DHT11 for temp and humidity.2016-01-10 18:48:12 - Arduino state updated to 0;0;3;0;9;read: 4-4-0 s=1,c=1,t=0,pt=7,l=5:21.0
4;1;1;0;0;21.0
2016-01-10 18:48:12 - livingTemp01 state updated to 21.0
2016-01-10 18:49:32 - Arduino state updated to 0;0;3;0;9;read: 10-10-0 s=1,c=1,t=16,pt=0,l=1:1
10;1;1;0;16;1
2016-01-10 18:49:35 - Arduino state updated to 0;0;3;0;9;read: 10-10-0 s=1,c=1,t=16,pt=0,l=1:0
10;1;1;0;16;0My confusion is how this software all works to get just the information from the gateway to the screen.
I know you have to declare an item in the demo.items file, and that item needs to be in the sitemap to display. but I do not understand how you get the status from the gateway? Can someone point me to some simple examples that include the mysensor.org PIR sensor? How does the item declaration get the knowledge of the change that the gateway is receiving from the sensor? I have read through several documents and tutorials, but I am missing this bit of information. -
@poeml more precisely, the Nano's FTDI chip connects to the booting Raspberry, but instead of registering a single device there are 4 (!) log lines claiming registering 4 devices (very funny), and none of the devices are bound.
May 23 23:16:21 bramble kernel: [ 3.738087] usb 1-1.5: new full-speed USB device number 5 using dwc_otg May 23 23:16:21 bramble kernel: [ 4.283520] usb 1-1.5: new full-speed USB device number 6 using dwc_otg May 23 23:16:21 bramble kernel: [ 4.768136] usb 1-1.5: new full-speed USB device number 7 using dwc_otg May 23 23:16:21 bramble kernel: [ 5.268161] usb 1-1.5: new full-speed USB device number 8 using dwc_otgI don't find a way to trigger re-registering the device, or power-cycle the USB port, via software. I can only power-cycle the whole USB bridge, which means that the LED goes out (the Ethernet chip is switched off as well...) and LED goes on again, but with the same faulty registering as when booting.
# cat reset-usb #!/bin/bash echo 0 > /sys/bus/usb/devices/1-1/authorized sleep 1 echo 1 > /sys/bus/usb/devices/1-1/authorizedUnplugging and replugging always works.
For the record: Raspberry Pi version 2 with the 4 USB ports, just updated to Debian 8.0 (Jessie). I didn't check with Debian Wheezy if it worked then. The Nano was linked from MySensors store I believe and works great otherwise. I have two of them and both have the same problem (or the Raspi's USB stack has the problem, who knows).
-
It just took me 2 hours to realize that you should not use
import java.util.*when you want to use timer operations like
if (timer=! null) { ... }Without importing java.util.* , everything works as expected. Someone has an idea why this is the case? Can you reproduce my problem?
-
Can someone please assist me regarding this serial connection setup.
I can see in my event log that I receive updates of the Arduino state as below:Arduino state updated to 99;1;1;0;0;23.7 99;0;1;0;1;37.2And also in the openhab.log file I get the following types of messages:
[DEBUG] [b.serial.internal.SerialDevice:225 ] - Received message '99;0;1;0;1;37.6 ' on serial port /dev/ttyUSB99But the rule is for some reason not initiated I guess as the println and logInfo i I've added to the top of the rule is absent from the logs. I can see from the tutorial and your posts that you get log information like below but these I cant find in any log.
[INFO ] [runtime.busevents ]Possibly I'm missing something in my logback.xml settings or perhaps there is some other reason to this which also might explain why my rule is not started. Perhaps its because I'm using a newer binding for the serial connection? (org.openhab.binding.serial-1.8.3.jar)
Any help would be much appreciated!
Update 1: Perhaps I'll try the mysensors binding and if I'm more successful with that approach I'll skip this serial binding altogether.
Update 2: Ok, I will be using the mysensors binding for the serial connection. I tried it last night and it just worked! And this serial binding approach also demands some quite extensive rule handling of the incoming messages which is not the case with mysensors binding. I think I read somewhere that the mysensors binding will also be available for Openhab 2.0 so hopefully I can continue using it also in the future.
My recommendation for new users of the serial gateway (who also uses openhap as a controller) is to go for the mysensors binding!
-
This post is deleted!
-
@TimO is it possible to send commands to actuators with this method? I have a LED Dimmer Actuator and don't know what I have to do in OpenHAB to send commands to this actuator over the serial gateway..
-
@HenryWhite: Yes it is possible.
Look at this example: https://forum.mysensors.org/topic/655/serial-gateway-connection-to-openhab/70 -
@HenryWhite: Yes it is possible.
Look at this example: https://forum.mysensors.org/topic/655/serial-gateway-connection-to-openhab/70Great! Thank you!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login