MySensors weather station




-
I think I at least partially figured out the problem. As mentioned earlier, I may need to use transactions for this. Being that I have never used SPI, much less SPI transactions before, I have limited knowledge of how this works. My little understanding of what I have read about transactions, you call :
SPI.beginTransaction( [SPI SETTINGS HERE] ); {device SPI code} ... SPI.endTransaction();If I understand this, you can use SPI settings specific to a device with [SPI SETTINGS HERE] while leaving things alone for other devices, correct?
So I started looking at the library for the AS5047P sensor and I see this line in the constructor:
SPCR = (1<<SPE) | (1<<MSTR) | (1<<CPHA) | (1<<SPR1) | (1<<SPR0); // slow down clock speed, set up spiI am assuming that this defines the settings that I would need for the beginTransaction(). If so, how do I decipher this into the settings I need to include in the beginTransaction() call?
What I did as a test is to move the above SPCR... line into the read_register function of the library like this:
uint32_t AS5047::read_register(uint32_t thisRegister) { SPCR = (1<<SPE) | (1<<MSTR) | (1<<CPHA) | (1<<SPR1) | (1<<SPR0); // slow down clock speed, set up spi byte inByte = 0; // incoming byte from the SPI long result = 0; // result to return byte lowbyte = thisRegister & 0b0000000011111111; byte highbyte = (thisRegister >> 8); digitalWrite(_ss, LOW); SPI.transfer(highbyte); // first byte in result = SPI.transfer(lowbyte); // first byte out digitalWrite(_ss, HIGH); delayMicroseconds(10); digitalWrite(_ss, LOW); int bytesToRead = 2; while (bytesToRead-- > 0) { // shift the first byte left, then get the second byte: result = result << 8; inByte = SPI.transfer(0x00); // combine the byte with the previous one: result = result | inByte; } // take the chip select high to de-select: digitalWrite(_ss, HIGH); result = result & 0b0011111111111111; return(result); }Now I appear to be getting correct wind direction data, but I feel that this is not the correct approach to doing it.
Can anyone help?
@dbemowsk you're right about the need for spi transactions on this one.
The sensor's spi interface gets initialized in the constructor and is overwritten by the radio. I understand your 'fix' will work, as you reinitialize the SPI bus everytime, as the transactions do in a portable way.
I have no time atm but I'll try to figure out the transaction settings when possible. -
@dbemowsk you're right about the need for spi transactions on this one.
The sensor's spi interface gets initialized in the constructor and is overwritten by the radio. I understand your 'fix' will work, as you reinitialize the SPI bus everytime, as the transactions do in a portable way.
I have no time atm but I'll try to figure out the transaction settings when possible.@Yveaux Thanks. I have been trying to research it in the mean time, buy as of yet have not figured out how to do it. If you know of any websites that explain how to do it, it would help.I try to figure things out on my own because then I understand them better.
Thanks for all of the help you have given me on this.
-
@Yveaux Thanks. I have been trying to research it in the mean time, buy as of yet have not figured out how to do it. If you know of any websites that explain how to do it, it would help.I try to figure things out on my own because then I understand them better.
Thanks for all of the help you have given me on this.
@dbemowsk Let's break that line down, using the ATmega328P datasheet (pg. 221,222):
SPCR = (1<<SPE) | (1<<MSTR) | (1<<CPHA) | (1<<SPR1) | (1<<SPR0)- SPCR : SPI Control Register 0
- Bits not explicitly stated are 0, and can be read as (0<<xxx)
- (1<<SPE) : Enable SPI
- (0<<DORD) : Data order; here 0 to indicate MSB first
- (1<<MSTR) : Master/slave select; here 1 to indicate master
- (0<<CPOL): Clock polarity; here 0 to indicate SCK is low when idle
- (1<<CPHA) : Clock phase; here 1 to indicate sample on trailing edge
- (1<<SPR1) | (1<<SPR0) : Clock rate select; here 011 indicating Fosc/128
The SPISettings is used as follows:
SPISettings(clockrate, order, mode)- Let's start with the easy one: clockrate.
The driver above uses Fosc/128, which is 16000000/128=125000 for a 16MHz crystal. This seems a safe value as the AS5047 datasheet states tclk=100ns, so it can handle 10MHz. - Order is just the DORD parameter, so MSBFIRST.
- Then the tricky one: SPI_MODE
Here's an extensive explanation. It's a combination of clock phase and clock polarity. Luckily the datasheet states explicitly: "The AS5047D SPI uses mode=1 (CPOL=0, CPHA=1) to exchange data.", so use SPI_MODE1
Putting things together and wrapping SPI communication with transactions the result should be be:
uint32_t AS5047::read_register(uint32_t thisRegister) { .... SPI.beginTransaction( SPISettings(125000, MSBFIRST, SPI_MODE1) ); .... digitalWrite(_ss, LOW); SPI.transfer(highbyte); // first byte in .... digitalWrite(_ss, HIGH); SPI.endTransaction() .... }The clockrate can be increased if you like.
-
@dbemowsk Let's break that line down, using the ATmega328P datasheet (pg. 221,222):
SPCR = (1<<SPE) | (1<<MSTR) | (1<<CPHA) | (1<<SPR1) | (1<<SPR0)- SPCR : SPI Control Register 0
- Bits not explicitly stated are 0, and can be read as (0<<xxx)
- (1<<SPE) : Enable SPI
- (0<<DORD) : Data order; here 0 to indicate MSB first
- (1<<MSTR) : Master/slave select; here 1 to indicate master
- (0<<CPOL): Clock polarity; here 0 to indicate SCK is low when idle
- (1<<CPHA) : Clock phase; here 1 to indicate sample on trailing edge
- (1<<SPR1) | (1<<SPR0) : Clock rate select; here 011 indicating Fosc/128
The SPISettings is used as follows:
SPISettings(clockrate, order, mode)- Let's start with the easy one: clockrate.
The driver above uses Fosc/128, which is 16000000/128=125000 for a 16MHz crystal. This seems a safe value as the AS5047 datasheet states tclk=100ns, so it can handle 10MHz. - Order is just the DORD parameter, so MSBFIRST.
- Then the tricky one: SPI_MODE
Here's an extensive explanation. It's a combination of clock phase and clock polarity. Luckily the datasheet states explicitly: "The AS5047D SPI uses mode=1 (CPOL=0, CPHA=1) to exchange data.", so use SPI_MODE1
Putting things together and wrapping SPI communication with transactions the result should be be:
uint32_t AS5047::read_register(uint32_t thisRegister) { .... SPI.beginTransaction( SPISettings(125000, MSBFIRST, SPI_MODE1) ); .... digitalWrite(_ss, LOW); SPI.transfer(highbyte); // first byte in .... digitalWrite(_ss, HIGH); SPI.endTransaction() .... }The clockrate can be increased if you like.
-
@Yveaux I cannot thank you enough. I tried these transaction settings and this worked perfectly. My hat is off to you.
-
@dbemowsk great to hear!
I hope I managed to explain to you how to get to these values, as you wanted to learn from the process :+1: -
Hello
A friend send me an old weather station in 868mhz, I want to hack it for using it in domoticz
Your project is similar as I want, where can I find your code?
Thank's -
Hello
A friend send me an old weather station in 868mhz, I want to hack it for using it in domoticz
Your project is similar as I want, where can I find your code?
Thank's@nicofly974 Unfortunately I put this on hold for a while as I have been having a bit of trouble with my power option for the node. I am actually working on a solar power setup with a small charge controller and a 2x18650 battery pack. The solar panel setup will be on a servo controlled solar tracker that I will run from a separate pro mini. My two issues right now are that I am having some issues with the charge controller, possibly user error. The other issue is designing and 3D printing the parts that will hold the charge controller, battery pack and tracker. If this cheap charge controller is an issue and I have to get a different one, it may alter my design. Shipping on this controller took forever to come on the boat from China.
I haven't looked at my code for the sensors in a while, but maybe in the next day or two I'll post what I have with the understanding that it is in Alpha stage.
-
@nicofly974 Unfortunately I put this on hold for a while as I have been having a bit of trouble with my power option for the node. I am actually working on a solar power setup with a small charge controller and a 2x18650 battery pack. The solar panel setup will be on a servo controlled solar tracker that I will run from a separate pro mini. My two issues right now are that I am having some issues with the charge controller, possibly user error. The other issue is designing and 3D printing the parts that will hold the charge controller, battery pack and tracker. If this cheap charge controller is an issue and I have to get a different one, it may alter my design. Shipping on this controller took forever to come on the boat from China.
I haven't looked at my code for the sensors in a while, but maybe in the next day or two I'll post what I have with the understanding that it is in Alpha stage.
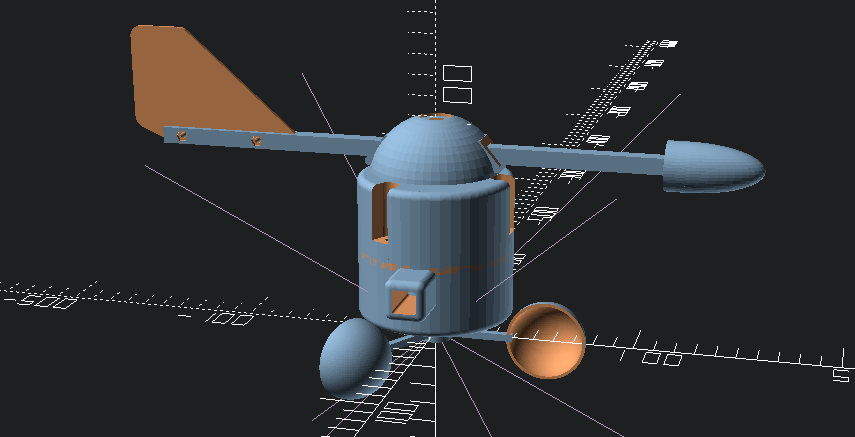
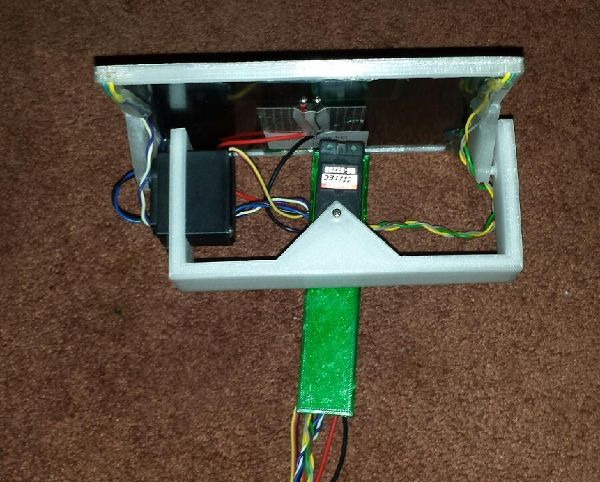
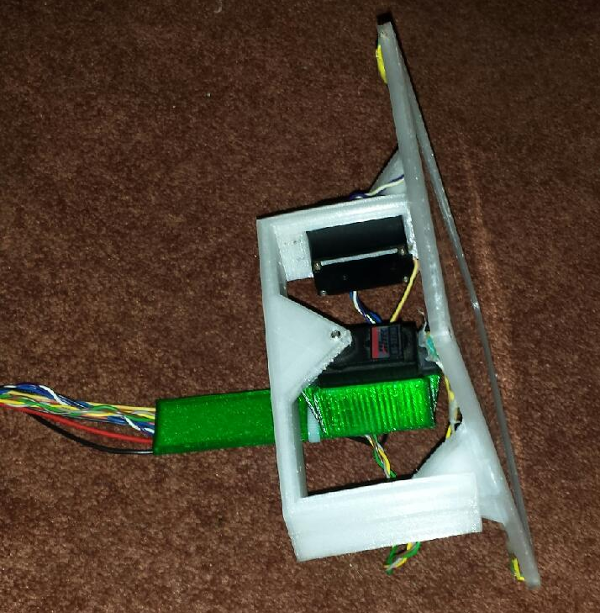
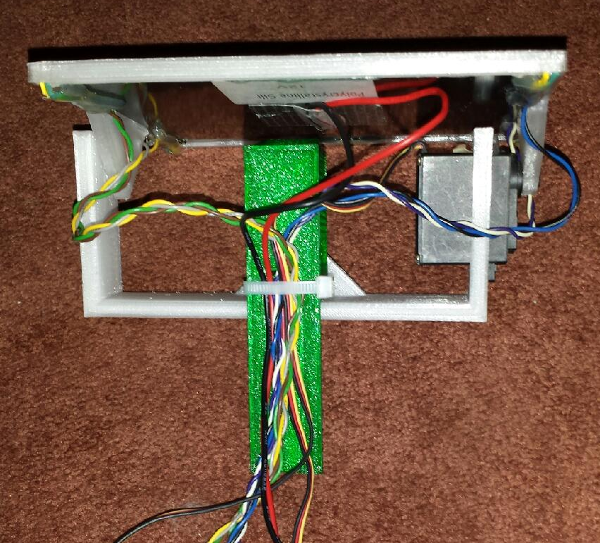
@dbemowsk Here are some pics of the dual axis solar tracker that I am working on for the weather station. In the 4 corners are the CDS photo cells for the tracker.


Vera Plus running UI7 with MySensors, Sonoffs and 1-Wire devices
Visit my website for more Bits, Bytes and Ramblings from me: http://dan.bemowski.info/ -
@dbemowsk Here are some pics of the dual axis solar tracker that I am working on for the weather station. In the 4 corners are the CDS photo cells for the tracker.
-
Hello,
For a project wtih a fablab, we have using a Li-Polymer Charge Management Controllers MCP73831
You can have free "sample" for prototype if you ask directly to the factory, perhaps it could be faster.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login