@yveaux I think it's convenient to connect many different sensors through fieldbus, and the camera itself is one kind of sensor.
D
dukelec
@dukelec
Posts
-
RS-485 Prevent Fake Cat Invasion (Peer-to-peer network video surveillance) -
RS-485 Prevent Fake Cat Invasion (Peer-to-peer network video surveillance)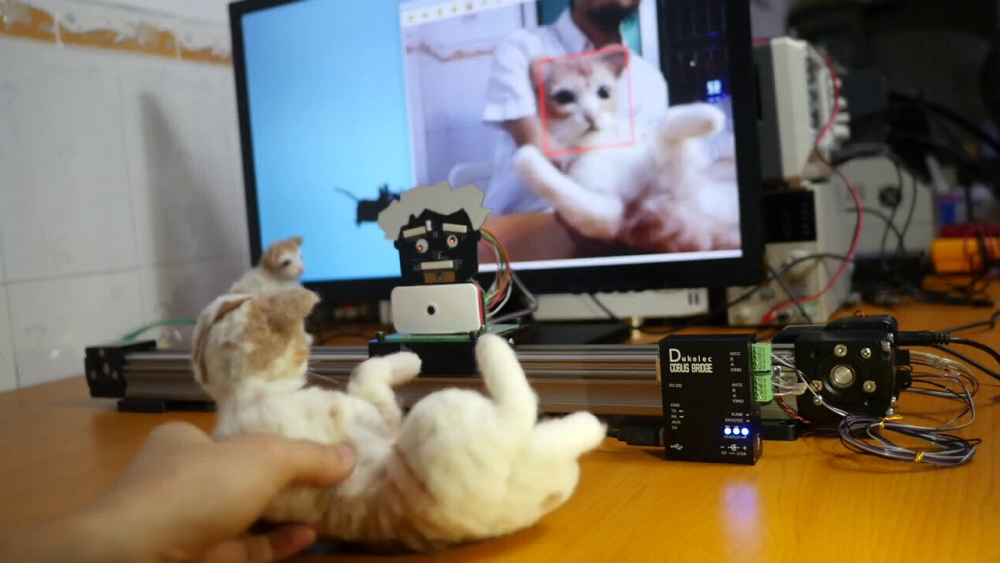
Full video:
https://youtu.be/qX5dh4wcfSkThe Raspberry Pi can output preview video and control command at the same time. We can monitor the recognition process on the PC. When problems are encountered, it is convenient to know the reason and adjust the parameters, and disconnecting the PC will not affect the demo operation.
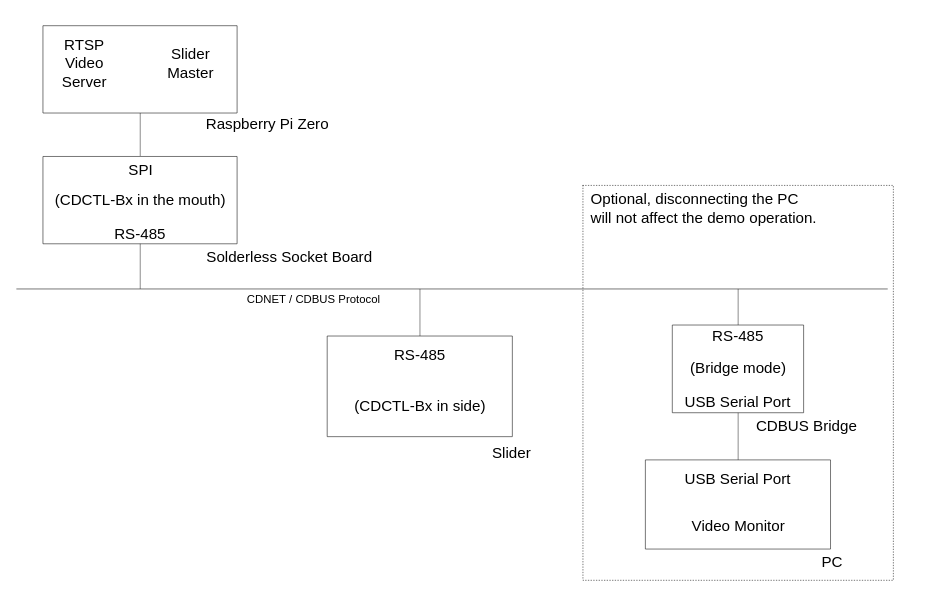
In addition, the Raspberry Pi can access the internet at any time through the PC, and it is easy to update software and for remote control.
This demo is base on the CDBUS protocol, which introduces an arbitration mechanism that automatically avoids conflicts like the CAN bus, more details please visit:
https://github.com/dukelec/cdbus_doc (Introduction)
https://github.com/dukelec/cdbus_ip (Protocol Details & FPGA IP core) -
CAN bus transport implementation for MYS@kimot
Much agree with you, I don't like CAN bus, let's return to RS485 bus, I already create a stand alone RS485 controller chip (CDCTL-Bx) which support arbitration (as same as CAN) and user data in packet is up to 253 bytes, the baud rate is also higher than CAN or CAN FD, and it's much more easy to use than the CAN:
https://github.com/dukelec/cdbus_doc (Open Source Project)