Shunt motor/valve

-
My heating system was not putting out any heated water to our radiators. A friend gave the idea to put an accelerator-meter to the pin.
This is what I made.
https://youtu.be/dXlzkhmw8aUOn the monitor you see 2666, that is the raw value from the sensor, below that you see how much the shunt is opened in percent.
Grapg from Grafana, top graph shows raw value from accelerator-meter, bottom graph with percent opened and outdoor temp:
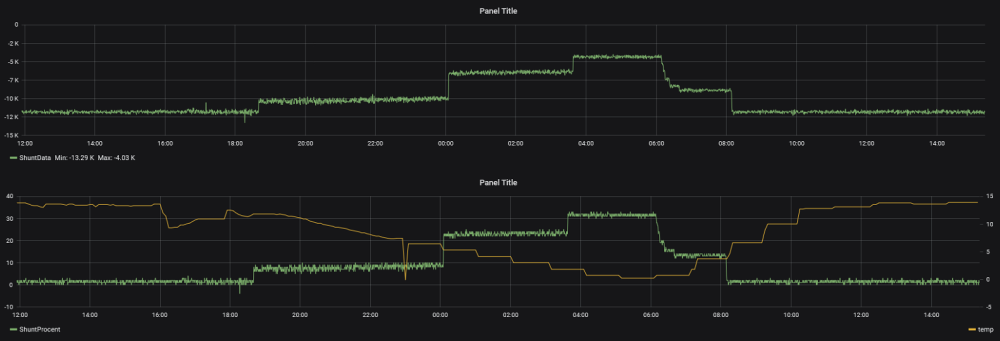
The code I am using:
// I2C device class (I2Cdev) demonstration Arduino sketch for MPU6050 class // 10/7/2011 by Jeff Rowberg <jeff@rowberg.net> // Updates should (hopefully) always be available at https://github.com/jrowberg/i2cdevlib // // Changelog: // 2013-05-08 - added multiple output formats // - added seamless Fastwire support // 2011-10-07 - initial release /* ============================================ I2Cdev device library code is placed under the MIT license Copyright (c) 2011 Jeff Rowberg Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE. =============================================== */ /** * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2015 Sensnology AB * Full contributor list: https://github.com/mysensors/Arduino/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* */ // Enable and select radio type attached #define MY_RADIO_RF24 // Enable debug prints to serial monitor #define MY_DEBUG #include <SPI.h> #include <MySensors.h> #include <Wire.h> #define CHILD_SHUNT 0 #define CHILD_SHUNTDATA 1 #define CHILD_FAILS 250 #define CHILD_PARENT 251 #define CHILD_DISTANCE 252 //NRF int Fails = 0; int OldFails = -1; int FailsLoopCount = 10; int OldParentNode = -1; int ParentNodeLoopCount = 10; int OldDistanceNode = -1; int DistanceLoopCount = 10; MyMessage msgShunt(CHILD_SHUNT, V_WATT); MyMessage msgShuntData(CHILD_SHUNTDATA, V_WATT); MyMessage msgFails(CHILD_FAILS, V_VA); MyMessage msgParent(CHILD_PARENT, V_VA); MyMessage msgDistance(CHILD_DISTANCE, V_VA); // I2Cdev and MPU6050 must be installed as libraries, or else the .cpp/.h files // for both classes must be in the include path of your project #include "I2Cdev.h" #include "MPU6050.h" // Arduino Wire library is required if I2Cdev I2CDEV_ARDUINO_WIRE implementation // is used in I2Cdev.h #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE #include "Wire.h" #endif // class default I2C address is 0x68 // specific I2C addresses may be passed as a parameter here // AD0 low = 0x68 (default for InvenSense evaluation board) // AD0 high = 0x69 MPU6050 accelgyro; //MPU6050 accelgyro(0x69); // <-- use for AD0 high int16_t ax, count; long axx; // uncomment "OUTPUT_READABLE_ACCELGYRO" if you want to see a tab-separated // list of the accel X/Y/Z and then gyro X/Y/Z values in decimal. Easy to read, // not so easy to parse, and slow(er) over UART. #define OUTPUT_READABLE_ACCELGYRO // uncomment "OUTPUT_BINARY_ACCELGYRO" to send all 6 axes of data as 16-bit // binary, one right after the other. This is very fast (as fast as possible // without compression or data loss), and easy to parse, but impossible to read // for a human. //#define OUTPUT_BINARY_ACCELGYRO void setup() { // join I2C bus (I2Cdev library doesn't do this automatically) #if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE Wire.begin(); #elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE Fastwire::setup(400, true); #endif // initialize serial communication // (38400 chosen because it works as well at 8MHz as it does at 16MHz, but // it's really up to you depending on your project) //Serial.begin(38400); // initialize device Serial.println("Initializing I2C devices..."); accelgyro.initialize(); // verify connection Serial.println("Testing device connections..."); Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); // use the code below to change accel/gyro offset values /* Serial.println("Updating internal sensor offsets..."); // -76 -2359 1688 0 0 0 Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76 Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359 Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688 Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0 Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0 Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0 Serial.print("\n"); accelgyro.setXGyroOffset(220); accelgyro.setYGyroOffset(76); accelgyro.setZGyroOffset(-85); Serial.print(accelgyro.getXAccelOffset()); Serial.print("\t"); // -76 Serial.print(accelgyro.getYAccelOffset()); Serial.print("\t"); // -2359 Serial.print(accelgyro.getZAccelOffset()); Serial.print("\t"); // 1688 Serial.print(accelgyro.getXGyroOffset()); Serial.print("\t"); // 0 Serial.print(accelgyro.getYGyroOffset()); Serial.print("\t"); // 0 Serial.print(accelgyro.getZGyroOffset()); Serial.print("\t"); // 0 Serial.print("\n"); */ } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Shuntventil", "20190505"); // Register all sensors to gateway (they will be created as child devices) present(CHILD_SHUNT, S_POWER, "Procent"); present(CHILD_SHUNTDATA, S_POWER, "ShuntData"); present(CHILD_FAILS, S_POWER, "Fails"); present(CHILD_PARENT, S_POWER, "Parent"); present(CHILD_DISTANCE, S_POWER, "Distance"); } void loop() { for (count = 0 ; count < 10 ; count++) { // read raw accel/gyro measurements from device //accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // these methods (and a few others) are also available //accelgyro.getAcceleration(&ax, &ay, &az); //accelgyro.getRotation(&gx, &gy, &gz); ax = accelgyro.getAccelerationX(); #ifdef OUTPUT_READABLE_ACCELGYRO // display tab-separated accel/gyro x/y/z values //Serial.print("a/g:\t"); //Serial.print(ax);// Serial.print("\t"); //Serial.println(axa);// Serial.print("\t"); //Serial.print(az); Serial.print("\t"); //Serial.print(gx); Serial.print("\t"); //Serial.print(gy); Serial.print("\t"); //Serial.println(gz); #endif axx = axx + ax; } axx = axx / 10; //Serial.println(axx); resend((msgShuntData.set(axx)),3); long y = map(axx,-12300,12500,0,100); //Serial.println(y); resend((msgShunt.set(y)),3); axx = 0; if ((OldParentNode != _transportConfig.parentNodeId) | (ParentNodeLoopCount >= 10)) { resend((msgParent.set(_transportConfig.parentNodeId)),3); OldParentNode = _transportConfig.parentNodeId; ParentNodeLoopCount = 0; } if ((OldDistanceNode != _transportConfig.distanceGW) | (DistanceLoopCount >= 10)) { resend((msgDistance.set(_transportConfig.distanceGW)),3); OldDistanceNode = _transportConfig.distanceGW; DistanceLoopCount = 0; } if ((OldFails != Fails) | (FailsLoopCount >= 3)) { failsend((msgFails.set(Fails)),3); OldFails = Fails; FailsLoopCount = 0; } ParentNodeLoopCount++; DistanceLoopCount++; FailsLoopCount++; sleep(30000); } //skicka axx(som är delat på 10) till DZ, så man kan kalibrera värden void resend(MyMessage & msg, int repeats) { int repeat = 0; int repeatdelay = 0; boolean sendOK = false; while ((sendOK == false) and(repeat < repeats)) { if (send(msg)) { sendOK = true; } else { Fails++; sendOK = false; Serial.print("Error "); Serial.println(repeat); repeatdelay += 250; repeat++; sleep(repeatdelay); } } } void failsend(MyMessage &msg, int repeats) { int repeat = 1; int repeatdelay = 0; boolean sendOK = false; while ((sendOK == false) and (repeat < repeats)) { if (send(msg)) { Fails = 0; sendOK = true; } else { Fails++; sendOK = false; Serial.print("Error "); Serial.println(repeat); repeatdelay += 250; repeat++; sleep(repeatdelay); } } }
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login