Pls Help: Sensor value shows in Domoticz Hardware TAB, but wont show on Switches


-
Please Help needed I have a Node with Sonar sensor and an digitalRead(A0) value from Node to Gateway. The value shows on Domoticz Hardware TAB, but wont show on Switches. I have stayed up all night looking for solutions without much luck. I sketch is as follows.
// Example sketch showing how to control physical relays. // This example will remember relay state even after power failure. // Enable debug prints #define MY_DEBUG ON // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_RF24_PA_LEVEL RF24_PA_HIGH // Options MAX to reach the furthest #define MY_NODE_ID 4 // Set this to fix your Radio ID or use AUTO or 1 #define MY_REGISTRATION_FEATURE // Force registration #define MY_REGISTRATION_RETRIES 5 #include <Wire.h> #include <TimeLib.h> #include <SPI.h> #include <MySensors.h> #include <NewPing.h> // For Debug #ifdef DEBUG_ON #define DEBUG_PRINT(x) Serial.print(x) #define DEBUG_PRINTLN(x) Serial.println(x) #else #define DEBUG_PRINT(x) #define DEBUG_PRINTLN(x) #define SERIAL_START(x) #endif #define RELAY_PIN 2 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define NUMBER_OF_RELAYS 5 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define SKETCH_NAME "Generator Node" #define SKETCH_VERSION "1.3.1" #define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS); MyMessage msgTank1(1, V_VOLUME); MyMessage msgTank2(8, V_VOLUME); boolean sensorState, lastSensorState; //constant for the sonar HC-SR04 sensor #define TRIGGER_PIN 8 #define ECHO_PIN 7 #define MAX_DISTANCE 300 //distance max measured //constant to calculate the volume of the tank #define high_water_level 30 //tank depth from the lowest point to the max water level #define distance_sensor 10 //was 30 = distance in cm between the max water level and the sensor #define tank_volume 1000 //tank volume (10000 default) when it is fitted to the max water level unsigned long SLEEP_TIME = 5000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. int lastDist; bool metric = true; void setup() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins to output mode pinMode(pin, OUTPUT); // Set relay to last known state (using eeprom storage) digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Initialised Relay: ")); DEBUG_PRINT(F(sensor)); DEBUG_PRINT(F(" at pin ")); DEBUG_PRINT(F(pin)); DEBUG_PRINT(F(" (")); DEBUG_PRINT(F(loadState(sensor))); DEBUG_PRINTLN(F(")")); } pinMode(A0, INPUT); // Then set etra sensor pins to input mode pinMode(A1, INPUT); // Float Sensor for Gen fuel Tank pinMode(A2, INPUT); // Spare Sensor Readout DEBUG_PRINTLN(F("Initialize additional Sensor: ")); } void presentation() { sendSketchInfo(SKETCH_NAME, SKETCH_VERSION); // Manually present the additional 3 sensors present(0, S_BINARY); pinMode(A0, INPUT); // Then set relay pins in output mode boolean savedState = loadState(A0); // Set relay to last known state (using eeprom storage) digitalWrite(A0, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A0)); send(msg.set(savedState? 0 : 1)); // Fetch relay status for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); } // DEBUG_PRINTLN(F("Sensor Presentation Complete")); // Manually present the additional 2 sensors present(6, S_WATER); pinMode(A1, INPUT); // Then set relay pins in output mode savedState = loadState(A1); // Set relay to last known state (using eeprom storage) digitalWrite(A1, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A1)); send(msg.set(savedState? 0 : 1)); } void loop() { // Alway process incoming messages whenever possible // Sleep until interrupt comes in on motion sensor. Send update every two minute. // sleep(digitalPinToInterrupt(DIGITAL_INPUT_SENSOR), CHANGE, SLEEP_TIME); Serial.print("Fuel Level: "); Serial.print(tank_level("liters")); Serial.print("L"); Serial.print("("); Serial.print(tank_level("percent")); Serial.println("%)"); send(msgTank1.set(tank_level("liters"))); if(digitalRead(A0) == LOW){ DEBUG_PRINTLN(F("There is no Light")); Serial.println(sensorState? "Light On" : "Light Off"); send(msgNEPA.set(sensorState?"0":"0")); // Update gateway on change of state } else { DEBUG_PRINTLN(F("Up NEPA!")); Serial.println(sensorState? "Light Off" : "Light On"); send(msgNEPA.set(sensorState?"1":"1")); // Update gateway on change of state } wait(2000); // use for debuging } void receive(const MyMessage &message){ // Change relay state if message is received if (digitalRead(A0) == HIGH){ // Sensor says tank is full do something // DEBUG_PRINTLN(F("Float Sensor High, 'Tank is Full'")); // digitalWrite(3, LOW); // Switch off tank pump saveState(message.sensor, message.getBool()); bool send(MyMessage &msgNEPA, bool ack); } if (message.type == V_STATUS){ // digitalWrite(message.sensor, !digitalRead(message.sensor)); if (message.getBool() == 0) { digitalWrite(message.sensor, LOW); // Store state in eeprom saveState(message.sensor, message.getBool()); } else //getBool() == 1 digitalWrite(message.sensor, HIGH); // Store state in eeprom saveState(message.sensor, message.getBool()); // digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Write some debug info Serial.print("Incoming change for sensor ID: "); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } int tank_level(String unit) //function to measure and convert the tank volume { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; // int level_liters,level_percent, echo_us, echo_cm, water_level_cm; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * (tank_volume / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }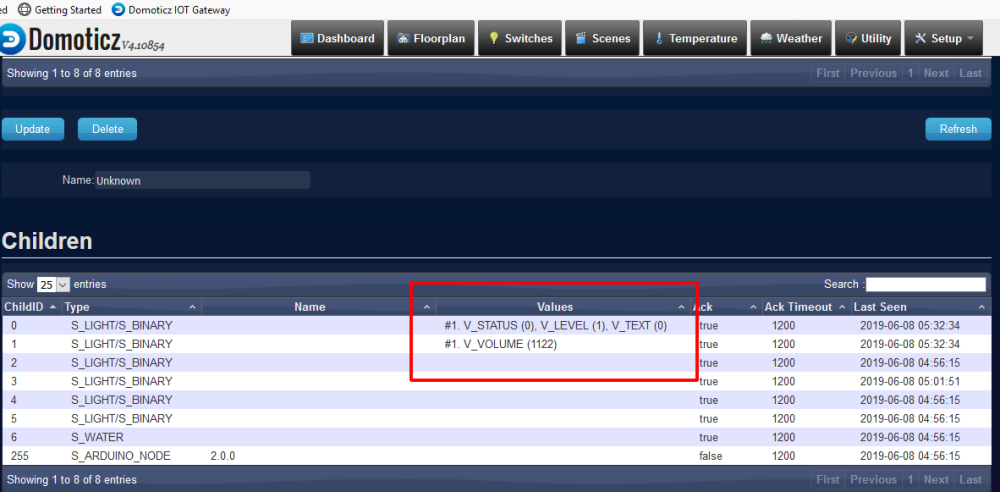
-
Please Help needed I have a Node with Sonar sensor and an digitalRead(A0) value from Node to Gateway. The value shows on Domoticz Hardware TAB, but wont show on Switches. I have stayed up all night looking for solutions without much luck. I sketch is as follows.
// Example sketch showing how to control physical relays. // This example will remember relay state even after power failure. // Enable debug prints #define MY_DEBUG ON // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_RF24_PA_LEVEL RF24_PA_HIGH // Options MAX to reach the furthest #define MY_NODE_ID 4 // Set this to fix your Radio ID or use AUTO or 1 #define MY_REGISTRATION_FEATURE // Force registration #define MY_REGISTRATION_RETRIES 5 #include <Wire.h> #include <TimeLib.h> #include <SPI.h> #include <MySensors.h> #include <NewPing.h> // For Debug #ifdef DEBUG_ON #define DEBUG_PRINT(x) Serial.print(x) #define DEBUG_PRINTLN(x) Serial.println(x) #else #define DEBUG_PRINT(x) #define DEBUG_PRINTLN(x) #define SERIAL_START(x) #endif #define RELAY_PIN 2 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define NUMBER_OF_RELAYS 5 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define SKETCH_NAME "Generator Node" #define SKETCH_VERSION "1.3.1" #define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS); MyMessage msgTank1(1, V_VOLUME); MyMessage msgTank2(8, V_VOLUME); boolean sensorState, lastSensorState; //constant for the sonar HC-SR04 sensor #define TRIGGER_PIN 8 #define ECHO_PIN 7 #define MAX_DISTANCE 300 //distance max measured //constant to calculate the volume of the tank #define high_water_level 30 //tank depth from the lowest point to the max water level #define distance_sensor 10 //was 30 = distance in cm between the max water level and the sensor #define tank_volume 1000 //tank volume (10000 default) when it is fitted to the max water level unsigned long SLEEP_TIME = 5000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. int lastDist; bool metric = true; void setup() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins to output mode pinMode(pin, OUTPUT); // Set relay to last known state (using eeprom storage) digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Initialised Relay: ")); DEBUG_PRINT(F(sensor)); DEBUG_PRINT(F(" at pin ")); DEBUG_PRINT(F(pin)); DEBUG_PRINT(F(" (")); DEBUG_PRINT(F(loadState(sensor))); DEBUG_PRINTLN(F(")")); } pinMode(A0, INPUT); // Then set etra sensor pins to input mode pinMode(A1, INPUT); // Float Sensor for Gen fuel Tank pinMode(A2, INPUT); // Spare Sensor Readout DEBUG_PRINTLN(F("Initialize additional Sensor: ")); } void presentation() { sendSketchInfo(SKETCH_NAME, SKETCH_VERSION); // Manually present the additional 3 sensors present(0, S_BINARY); pinMode(A0, INPUT); // Then set relay pins in output mode boolean savedState = loadState(A0); // Set relay to last known state (using eeprom storage) digitalWrite(A0, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A0)); send(msg.set(savedState? 0 : 1)); // Fetch relay status for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); } // DEBUG_PRINTLN(F("Sensor Presentation Complete")); // Manually present the additional 2 sensors present(6, S_WATER); pinMode(A1, INPUT); // Then set relay pins in output mode savedState = loadState(A1); // Set relay to last known state (using eeprom storage) digitalWrite(A1, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A1)); send(msg.set(savedState? 0 : 1)); } void loop() { // Alway process incoming messages whenever possible // Sleep until interrupt comes in on motion sensor. Send update every two minute. // sleep(digitalPinToInterrupt(DIGITAL_INPUT_SENSOR), CHANGE, SLEEP_TIME); Serial.print("Fuel Level: "); Serial.print(tank_level("liters")); Serial.print("L"); Serial.print("("); Serial.print(tank_level("percent")); Serial.println("%)"); send(msgTank1.set(tank_level("liters"))); if(digitalRead(A0) == LOW){ DEBUG_PRINTLN(F("There is no Light")); Serial.println(sensorState? "Light On" : "Light Off"); send(msgNEPA.set(sensorState?"0":"0")); // Update gateway on change of state } else { DEBUG_PRINTLN(F("Up NEPA!")); Serial.println(sensorState? "Light Off" : "Light On"); send(msgNEPA.set(sensorState?"1":"1")); // Update gateway on change of state } wait(2000); // use for debuging } void receive(const MyMessage &message){ // Change relay state if message is received if (digitalRead(A0) == HIGH){ // Sensor says tank is full do something // DEBUG_PRINTLN(F("Float Sensor High, 'Tank is Full'")); // digitalWrite(3, LOW); // Switch off tank pump saveState(message.sensor, message.getBool()); bool send(MyMessage &msgNEPA, bool ack); } if (message.type == V_STATUS){ // digitalWrite(message.sensor, !digitalRead(message.sensor)); if (message.getBool() == 0) { digitalWrite(message.sensor, LOW); // Store state in eeprom saveState(message.sensor, message.getBool()); } else //getBool() == 1 digitalWrite(message.sensor, HIGH); // Store state in eeprom saveState(message.sensor, message.getBool()); // digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Write some debug info Serial.print("Incoming change for sensor ID: "); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } int tank_level(String unit) //function to measure and convert the tank volume { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; // int level_liters,level_percent, echo_us, echo_cm, water_level_cm; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * (tank_volume / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }
@eme look at the debug log from the node and the gateway.
My guess is that they will show messages with st=fail, showing that the message didn't get through.
If you haven't already, see https://forum.mysensors.org/topic/666/debug-faq-and-how-ask-for-help/ for a list of the most common problems and a troubleshooting flowchart.
-
Please Help needed I have a Node with Sonar sensor and an digitalRead(A0) value from Node to Gateway. The value shows on Domoticz Hardware TAB, but wont show on Switches. I have stayed up all night looking for solutions without much luck. I sketch is as follows.
// Example sketch showing how to control physical relays. // This example will remember relay state even after power failure. // Enable debug prints #define MY_DEBUG ON // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_RF24_PA_LEVEL RF24_PA_HIGH // Options MAX to reach the furthest #define MY_NODE_ID 4 // Set this to fix your Radio ID or use AUTO or 1 #define MY_REGISTRATION_FEATURE // Force registration #define MY_REGISTRATION_RETRIES 5 #include <Wire.h> #include <TimeLib.h> #include <SPI.h> #include <MySensors.h> #include <NewPing.h> // For Debug #ifdef DEBUG_ON #define DEBUG_PRINT(x) Serial.print(x) #define DEBUG_PRINTLN(x) Serial.println(x) #else #define DEBUG_PRINT(x) #define DEBUG_PRINTLN(x) #define SERIAL_START(x) #endif #define RELAY_PIN 2 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define NUMBER_OF_RELAYS 5 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define SKETCH_NAME "Generator Node" #define SKETCH_VERSION "1.3.1" #define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS); MyMessage msgTank1(1, V_VOLUME); MyMessage msgTank2(8, V_VOLUME); boolean sensorState, lastSensorState; //constant for the sonar HC-SR04 sensor #define TRIGGER_PIN 8 #define ECHO_PIN 7 #define MAX_DISTANCE 300 //distance max measured //constant to calculate the volume of the tank #define high_water_level 30 //tank depth from the lowest point to the max water level #define distance_sensor 10 //was 30 = distance in cm between the max water level and the sensor #define tank_volume 1000 //tank volume (10000 default) when it is fitted to the max water level unsigned long SLEEP_TIME = 5000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. int lastDist; bool metric = true; void setup() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins to output mode pinMode(pin, OUTPUT); // Set relay to last known state (using eeprom storage) digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Initialised Relay: ")); DEBUG_PRINT(F(sensor)); DEBUG_PRINT(F(" at pin ")); DEBUG_PRINT(F(pin)); DEBUG_PRINT(F(" (")); DEBUG_PRINT(F(loadState(sensor))); DEBUG_PRINTLN(F(")")); } pinMode(A0, INPUT); // Then set etra sensor pins to input mode pinMode(A1, INPUT); // Float Sensor for Gen fuel Tank pinMode(A2, INPUT); // Spare Sensor Readout DEBUG_PRINTLN(F("Initialize additional Sensor: ")); } void presentation() { sendSketchInfo(SKETCH_NAME, SKETCH_VERSION); // Manually present the additional 3 sensors present(0, S_BINARY); pinMode(A0, INPUT); // Then set relay pins in output mode boolean savedState = loadState(A0); // Set relay to last known state (using eeprom storage) digitalWrite(A0, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A0)); send(msg.set(savedState? 0 : 1)); // Fetch relay status for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); } // DEBUG_PRINTLN(F("Sensor Presentation Complete")); // Manually present the additional 2 sensors present(6, S_WATER); pinMode(A1, INPUT); // Then set relay pins in output mode savedState = loadState(A1); // Set relay to last known state (using eeprom storage) digitalWrite(A1, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A1)); send(msg.set(savedState? 0 : 1)); } void loop() { // Alway process incoming messages whenever possible // Sleep until interrupt comes in on motion sensor. Send update every two minute. // sleep(digitalPinToInterrupt(DIGITAL_INPUT_SENSOR), CHANGE, SLEEP_TIME); Serial.print("Fuel Level: "); Serial.print(tank_level("liters")); Serial.print("L"); Serial.print("("); Serial.print(tank_level("percent")); Serial.println("%)"); send(msgTank1.set(tank_level("liters"))); if(digitalRead(A0) == LOW){ DEBUG_PRINTLN(F("There is no Light")); Serial.println(sensorState? "Light On" : "Light Off"); send(msgNEPA.set(sensorState?"0":"0")); // Update gateway on change of state } else { DEBUG_PRINTLN(F("Up NEPA!")); Serial.println(sensorState? "Light Off" : "Light On"); send(msgNEPA.set(sensorState?"1":"1")); // Update gateway on change of state } wait(2000); // use for debuging } void receive(const MyMessage &message){ // Change relay state if message is received if (digitalRead(A0) == HIGH){ // Sensor says tank is full do something // DEBUG_PRINTLN(F("Float Sensor High, 'Tank is Full'")); // digitalWrite(3, LOW); // Switch off tank pump saveState(message.sensor, message.getBool()); bool send(MyMessage &msgNEPA, bool ack); } if (message.type == V_STATUS){ // digitalWrite(message.sensor, !digitalRead(message.sensor)); if (message.getBool() == 0) { digitalWrite(message.sensor, LOW); // Store state in eeprom saveState(message.sensor, message.getBool()); } else //getBool() == 1 digitalWrite(message.sensor, HIGH); // Store state in eeprom saveState(message.sensor, message.getBool()); // digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Write some debug info Serial.print("Incoming change for sensor ID: "); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } int tank_level(String unit) //function to measure and convert the tank volume { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; // int level_liters,level_percent, echo_us, echo_cm, water_level_cm; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * (tank_volume / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }
@eme
I am not sure if Domoticz can know, what you want.
I am not MySensors expert, but there are some weird things in your code:#define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS);msg and msgNEPA are identical, but you use it in different ways ....
MyMessage msgTank1(1, V_VOLUME);For CHILD ID 1 type of message V_VOLUME, but in loop:
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); }You present CHILID ID 1 like S_BINARY
And then you set to this binary sensor volume value:
send(msgTank1.set(tank_level("liters")));And in the same presentation loop you send value only to child id 0, because msg.set send to ID 0
-
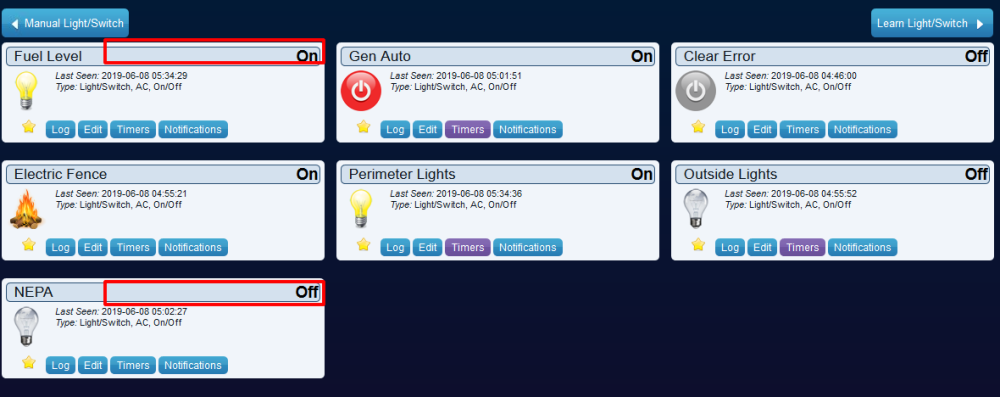
Did you activate the child(ren) through the "Setup" > "Devices" list? If yes, the arrow on the child(ren) should be oriented to the left side. If not, activate them, giving a name. You'll then see them on the associated tabs. Note that device type depends on the type sent during presentation (so don't expect being able to declare device as a switch if you don't use the right child type)
-
In addition to the remark on declaring sensor to Domoticz, the sketch itself seems to me a bit confusing.
Normally, you should do setup into setup function (stuff like pin mode, even eventually reading saved config and setting relay in correct state), presentation should contain only sendsketchinfo() & present(), loop should do the repetitive job.
You should avoid blocking the loop, especially if you want to receive messages (as you did).
You're using relay from pin 2 to 6 but sensor 1 to 5, but when receiving an order to set sensor x, you set pin x (instead of x+1). Result may not exactly be what you want/imagine.
You're turning pump off only when receiving a message (as the test is done here), instead in the loop.
You're using digitalWrite() on some analog pin (A1) ;-)
You're sending udpdates every 2 seconds, while sending either changes or data at larger interval may fit better.
In addition, you may also want to simplify:
send(msgNEPA.set(sensorState?"0":"0")) by send(msgNEPA.set(0)) (in addition, this will send numeric value instead of string, don't think that sending a string is what you want)and
send(msgNEPA.set(sensorState?"1":"1")) by send(msgNEPA.set(1))
May I suggest you explain what you have, and what you want to do, for us to guide you setting the sensors properly?