MySensors weather station




-
@gohan I can't see those small panels delivering that much. Plus, at certain parts of the day a number of the panels will most likely be shaded lowering their output.
Vera Plus running UI7 with MySensors, Sonoffs and 1-Wire devices
Visit my website for more Bits, Bytes and Ramblings from me: http://dan.bemowski.info/ -
@gohan I can't see those small panels delivering that much. Plus, at certain parts of the day a number of the panels will most likely be shaded lowering their output.
@dbemowsk yup, actually there are 8 of them, each providing nominal 0,5 volts, so to power up the lipo charger for battery I need at least 4 volts, in direct sunlight I think this will not be problem, but as @dbemowsk says, it will not have ideal position to sun every day and for whole time. but there is big enough reserve at battery , providing power for few days to weeks even without solar panel.
and I am also checking voltage on solar panel so if there would be some problem with charging I can set notifications or something from home automation system. -
I did some wind speed and direction sensor boards that I use in my own weather station design. All solid state and high resolution with analog signal readout, voltage for direction, 8 pulse per rev for speed. For inspiration see http://wws.us.to. Gary
-
@dbemowsk yup, actually there are 8 of them, each providing nominal 0,5 volts, so to power up the lipo charger for battery I need at least 4 volts, in direct sunlight I think this will not be problem, but as @dbemowsk says, it will not have ideal position to sun every day and for whole time. but there is big enough reserve at battery , providing power for few days to weeks even without solar panel.
and I am also checking voltage on solar panel so if there would be some problem with charging I can set notifications or something from home automation system. -
@Luc3as if you put solar panels in series you will get resistance from the shaded ones (at least that is what I saw in some experiments) . It would be better to have a single one pointing south that gathers the most sunlight and that's it
@gohan said in MySensors weather station:
@Luc3as if you put solar panels in series you will get resistance from the shaded ones
That is correct, as far as what I have learned. Large monocrystaline and polycrystaline solar panels like the ones shown below have low to no output for the entire panel when one or more of the cells on a panel is shaded or covered.

Amorphous solar panels like these have closer to full output with less drop-off in shaded areas, but have a lower overall amperage output than monocrystaline and polycrystaline panels.

The cells that @Luc3as has in his pic appear to be monocrystaline cells. Each cell will produce about 0.5 volts, so depending on the batteries you are using and the charging circuit, you could put some of these in series to create a couple banks, and then put the banks in parallel, you may get some usable power to charge a battery.
-
I did some wind speed and direction sensor boards that I use in my own weather station design. All solid state and high resolution with analog signal readout, voltage for direction, 8 pulse per rev for speed. For inspiration see http://wws.us.to. Gary
@GaryStofer I was checking out your weather station design. Nice work. Out of curiosity, what did you use for your wind direction sensor?
-
@GaryStofer I was checking out your weather station design. Nice work. Out of curiosity, what did you use for your wind direction sensor?
@dbemowsk Initially I uses an AS5030 encoder, but then I switched to the EM-3242 as it's much cheaper and smaller and does the same. My board has an Op-amp inverter to change the sense of angle to voltage so that the magnet can run on the top of the chip rather than on the bottom. Only problem we had with the EM-3242 was that it has no hysteresis which shows up at the 360/0 junction.
-
So, I had put this project on hold for a bit, but I am back at it. One of the parts of the project that I will be talking about in this post is the rain gauge portion of this. I had started a thread on this part a while back, but decided that I would combine everything for the weather station in this thread.
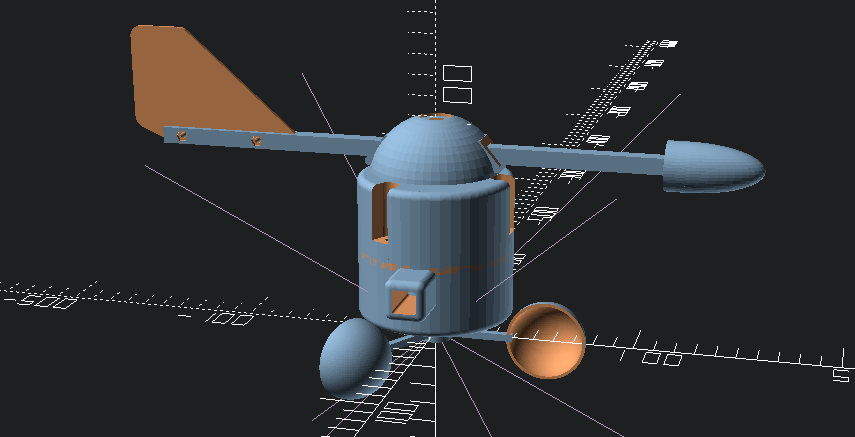
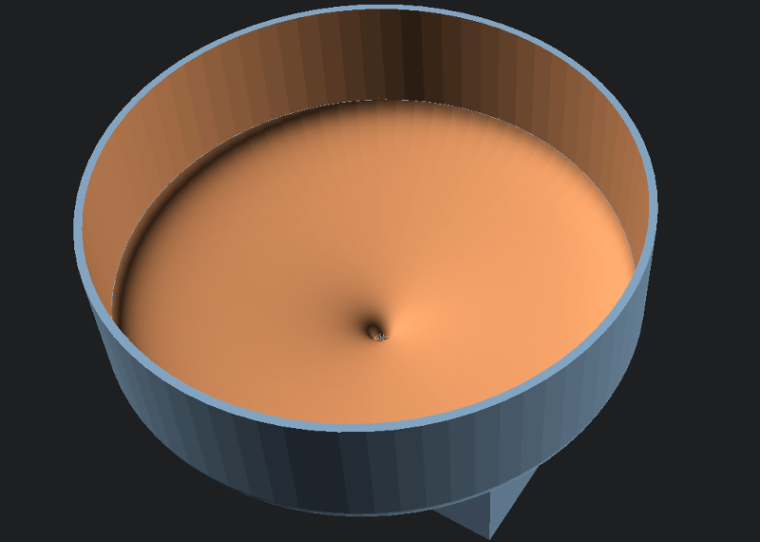
So one of the things with this rain gauge was that I wanted to make it fairly accurate. In my "tipping bucket rain gauge" thread, @BulldogLowell had mentioned that an 8 inch opening on the funnel is typical for what is used commercially, so I went with that and designed this:
Before I could print this on the 3D printer, I needed to print some different parts for my printer to allow for it to print the large size of the funnel. I also did some research on what type of plastic I should use before printing this monstrous part. Something I should have looked into more before printing the wind direction vane and wind speed rotor. Being that this will be outdoors in the sun it will need to have some UV resistance. I ended up settling on e-sun PETG filament. According to this review that I read, there was this statement that sold me on it:"It can also maintain the finished product's toughness and prevent it from turning into a yellowish color. PETG also contains UV absorber and can serve as a protective layer from the influence of ultraviolet light."
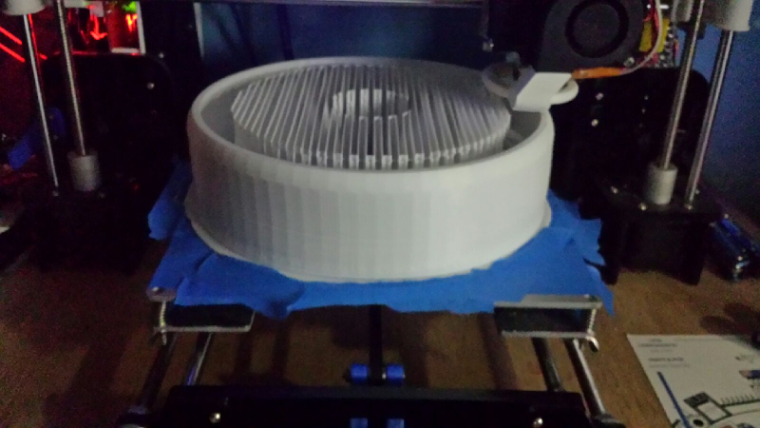
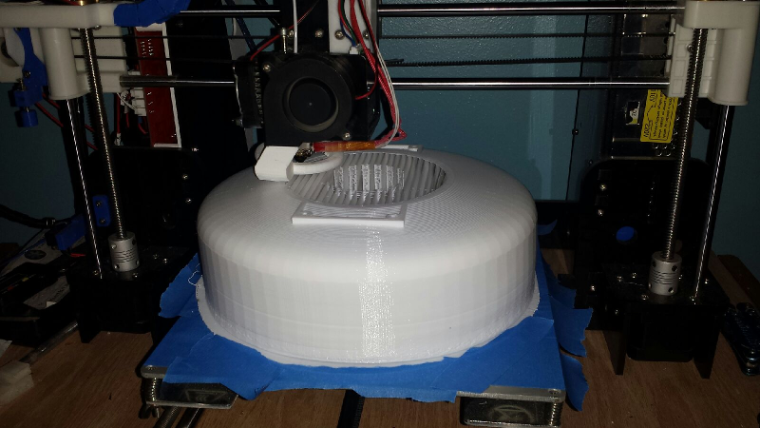
At any rate, I just got my brand new roll of white and started the print:
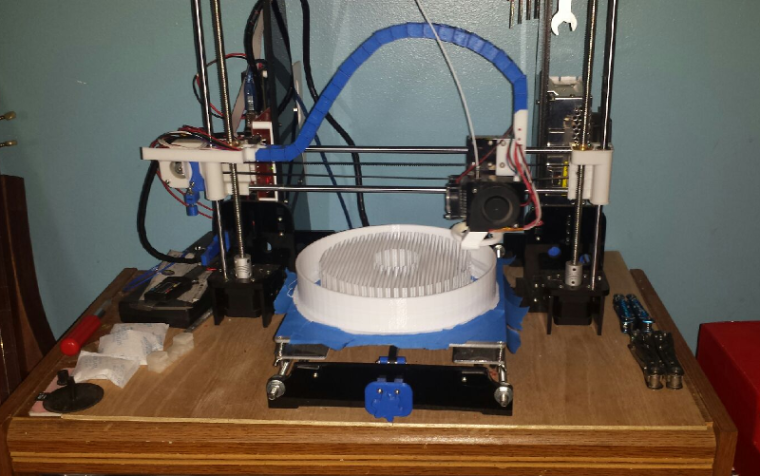
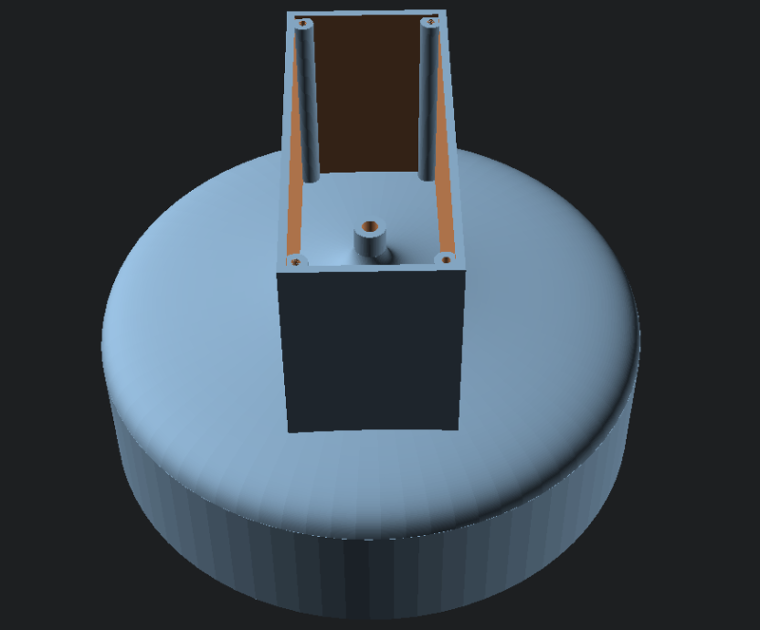
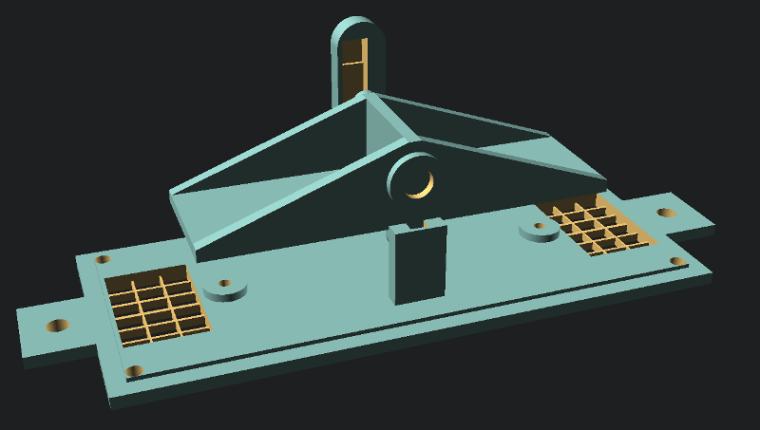
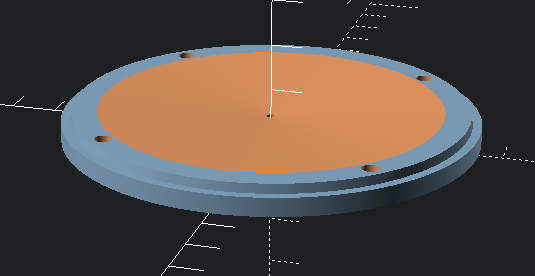
I am running at a 0.24 layer height which should be fine for this. I am printing at 30 mm/s. Cura says 44 hours 40 minutes for the print, but the times from cura are usually a bit short. I am betting on about 48 hours total print time. This will be the largest print job I have ever had the printer do. The picture is at about 17 to 18 hours into the print.Tonight I will be tweaking the design of the base that will hold the tipping bucket and sensor. I did some test prints a while back of the basic parts of this to see how they would function, and I think they worked well. This is the basic design that I have as of now:
A few tweaks to this and it should be good. The main thing is going to be figuring out how I want this to mount/attach to the rest of the system with the wind sensors and the arduino. Since this will just have the reed sensor, I will need to account for how it will get wired to the arduino. I am open for any suggestions on how to attach this to the rest of the sensors. My plan was to have some PVC pipes as the supports and mount things to that. I will need to watch out for the drain holes when mounting.All in all I think the project is coming along despite having to put it on hold for a while. As always, I am open to any feedback or suggestions that anyone can give.
Thanks for reading.
-
thanks for this
one of my cups on my anemometer is broken might be able to tweak that file instead of starting from scratch now -
thanks for this
one of my cups on my anemometer is broken might be able to tweak that file instead of starting from scratch now@MasterCATZ the anemometer that I used was one that I found on thingiverse. The link is in the beginning of the thread, but I am sure you found that already. You may want to just create a whole new cup rotor for yours.
-
So, I had put this project on hold for a bit, but I am back at it. One of the parts of the project that I will be talking about in this post is the rain gauge portion of this. I had started a thread on this part a while back, but decided that I would combine everything for the weather station in this thread.
So one of the things with this rain gauge was that I wanted to make it fairly accurate. In my "tipping bucket rain gauge" thread, @BulldogLowell had mentioned that an 8 inch opening on the funnel is typical for what is used commercially, so I went with that and designed this:
Before I could print this on the 3D printer, I needed to print some different parts for my printer to allow for it to print the large size of the funnel. I also did some research on what type of plastic I should use before printing this monstrous part. Something I should have looked into more before printing the wind direction vane and wind speed rotor. Being that this will be outdoors in the sun it will need to have some UV resistance. I ended up settling on e-sun PETG filament. According to this review that I read, there was this statement that sold me on it:"It can also maintain the finished product's toughness and prevent it from turning into a yellowish color. PETG also contains UV absorber and can serve as a protective layer from the influence of ultraviolet light."
At any rate, I just got my brand new roll of white and started the print:
I am running at a 0.24 layer height which should be fine for this. I am printing at 30 mm/s. Cura says 44 hours 40 minutes for the print, but the times from cura are usually a bit short. I am betting on about 48 hours total print time. This will be the largest print job I have ever had the printer do. The picture is at about 17 to 18 hours into the print.Tonight I will be tweaking the design of the base that will hold the tipping bucket and sensor. I did some test prints a while back of the basic parts of this to see how they would function, and I think they worked well. This is the basic design that I have as of now:
A few tweaks to this and it should be good. The main thing is going to be figuring out how I want this to mount/attach to the rest of the system with the wind sensors and the arduino. Since this will just have the reed sensor, I will need to account for how it will get wired to the arduino. I am open for any suggestions on how to attach this to the rest of the sensors. My plan was to have some PVC pipes as the supports and mount things to that. I will need to watch out for the drain holes when mounting.All in all I think the project is coming along despite having to put it on hold for a while. As always, I am open to any feedback or suggestions that anyone can give.
Thanks for reading.
-
@gohan I agree, but I wanted to play it safe for when it got to the main funnel part. I opted to set the structure type to lines instead of a grid to at least keep the waste down some.
Just over 24 hours into the print. As you can see in this updated pic, it is just starting to get to what will be the top part of the funnel where it is tapering in.
-
Hello,
I found this in the forum. Perhaps it helps for the wind direction detection.
https://forum.mysensors.org/post/17825
Especially here
http://www.philpot.me/weatherinsider.html -
Hello,
I found this in the forum. Perhaps it helps for the wind direction detection.
https://forum.mysensors.org/post/17825
Especially here
http://www.philpot.me/weatherinsider.html@marco4711 Thanks for the links. I still have a few more things that I want to try to get my setup working If it comes down to it, I may use MasterCATZ' idea of using a magnetic rotational sensor. I don't give up easily.
-
Well, the part finally finished. Roughly 46 hours. Overall, I think it will work good. It was a bit of a job clearing out all of the support material though.

The bottom turned out well.
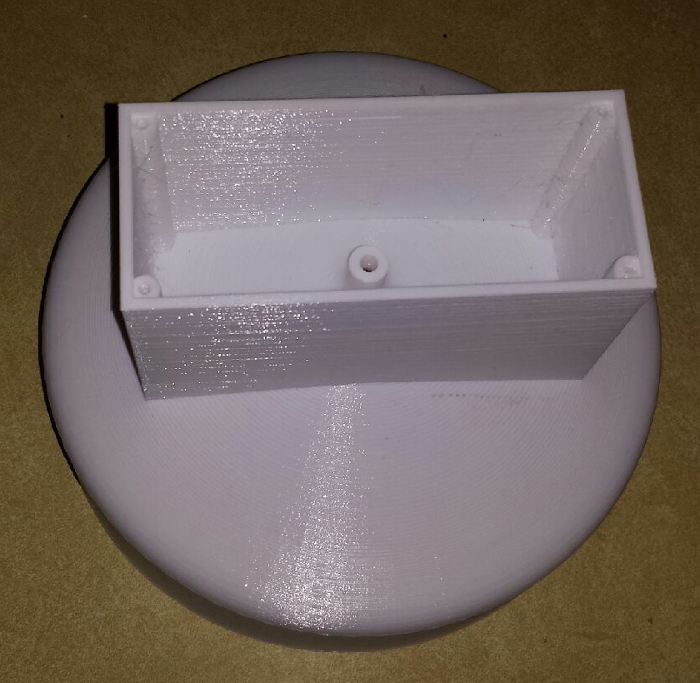
The first few layers had some issues, but really nothing that will defeat it's purpose. Had me worried for a short time though, but I gave it the benefit of the doubt.

-
So, for the latest addition to my weather station, I decided to make a radiation shield to house a DHT22 temp and humidity sensor. I figured that I would also need a place to put the arduino to be used as a connection hub for everything and I figured this would be as good a place as any. This is my design for it:
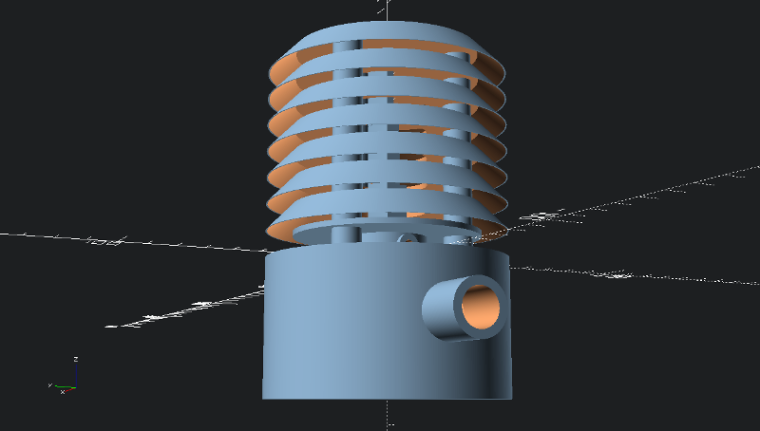
The under side of the base is where the electronics will be mounted. I have designed the standoffs to mount an easy newbie board. and should have plenty of room for wire connections as these will be fairly basic.
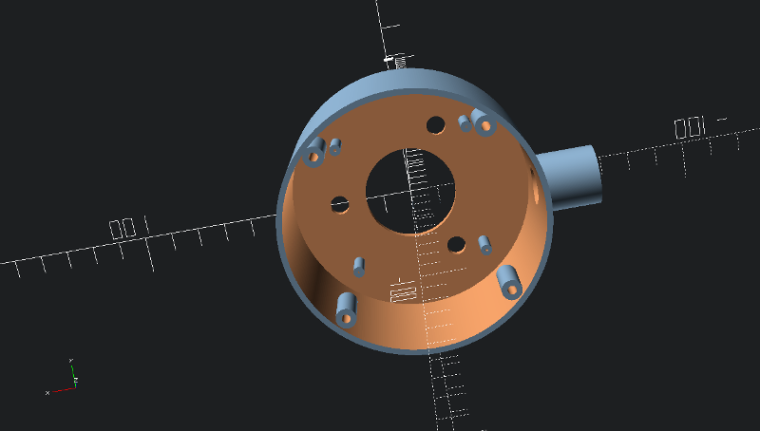
In the event that water should get inside of the unit due to wind or other factors, I have designed the bottom cover with a tapered center going to a drain hole.
I have the radiation shield and rain gauge partially assembled for now for programming and testing. I will get some better pictures of that tomorrow and post them to the thread.
One other change that I decided on was for the wind direction sensor. Since I had a bit of trouble with the other designs that I tested using reed switches and IR phototransistors, I decided to try an AS5047P magnetic direction sensor. I ordered this one off of ebay. It was a bit expensive at $16 US plus $3.39 for shipping, but the person selling it mentioned that it comes with an extra chip. These sell on Digikey for $17 plus $7 and change for shipping, and the chips alone sell for around $9, so I didn't think it was that bad of a deal. I should have that later this week.

Once I get this assembled I think the last thing will be to figure out all of the programming, which I have a bit of a start on using the rain gauge code from the build section of the site. I have been researching the code for the anemometer, and that may take a bit of planning with everything else that I have running, but I think it can be done. With the new direction sensor module, that should be pretty straight forward as far as connection and code, I just need to decide if I want to connect it with SPI or straight analog. I am thinking though that this project is nearing completion. It was a bit of a learning curve building all of the parts, but I think it was a good journey.
As mentioned, I'll post more pics tomorrow.
-
looking good
I need to beef up my solar panels
I get 1 week before the low battery indicator switches on and I loose half my distance
instead of using 2x AA 1.5v batteries ( or 1.2v rechargeables )
I am just going to run 18650 cells and use a 4v solar panel
-
looking good
I need to beef up my solar panels
I get 1 week before the low battery indicator switches on and I loose half my distance
instead of using 2x AA 1.5v batteries ( or 1.2v rechargeables )
I am just going to run 18650 cells and use a 4v solar panel
@MasterCATZ I had actually thought of getting a small 6 volt SLA or AGM battery and connecting a small solar panel to it. I can knock out an easy battery box with a solar panel mount on my 3D printer. These are the solar panels I was looking at as possibilities:
https://www.amazon.com/Sunnytech-333ma-Module-System-Charger/dp/B00HQXQOIQ/ref=sr_1_28?ie=UTF8&qid=1499001654&sr=8-28&keywords=6+volt+solar+panel+charger
https://www.amazon.com/Portable-Module-System-Battery-Charger/dp/B01JLPM81I/ref=sr_1_39?ie=UTF8&qid=1499001192&sr=8-39&keywords=6+volt+solar+panel+charger
I just need enough power from the panel to power the arduino and sensors during the day plus a little extra to top off the battery. I figured if I ever decide to add more sensors to the station I'll have all the power I need to handle whatever I put on it. I have my Easy Newbie board set up with a 5V pro mini and power coming into the RAW input. I think I'll be set.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login