Alarm Clock
-
Guys
Funny discovery tonight :
"alarm time" value in PaperUI can be set by clicking on it !! It is not a read-only value, it can also BE SET !!!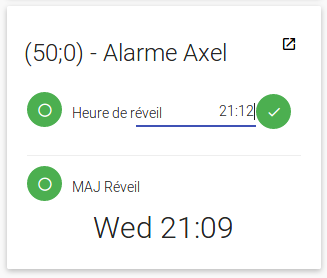
Now the big question is: how can my node retreive that new value ?
21:17:04.816 [DEBUG] [rsAbstractConnection$MySensorsReader] - 50;255;3;0;21;0 21:17:20.291 [INFO ] [smarthome.event.ItemCommandEvent ] - Item 'bedAlarm01' received command 21:12 21:17:20.296 [DEBUG] [rs.internal.gateway.MySensorsGateway] - Node 50 found in gateway 21:17:20.298 [DEBUG] [rs.internal.gateway.MySensorsGateway] - Child 0 found in node 50 21:17:20.299 [DEBUG] [rsAbstractConnection$MySensorsWriter] - Sending to MySensors: 50;0;1;0;47;21:12Looks like gateway sends a text message (47) towards node... so sketch needs to make a difference between "lock" messages and "alarm time" messages, right ?
/*** receive alarme state and time from controller ***/ void receive(const MyMessage & message) { if (message.type == V_LOCK_STATUS) { setAlarmState(message.getBool(), false); } if (message.type == V_TEXT) { do ( use strtok_r(message.data, ";", &p) to extract payload somehow extract hour and minute from that payload store them in int alarmHour int and alarmMin } }A clue to get me on the way ?
Thanks a lot for your input :)
-
Guys,
I need some help por favor :)
I am fighting against payload! The picture (a few posts above) shows that i can modify two values (seen under "Heure de réveil")
As i validate the new value, the gateway sends a message to the node
Sending to MySensors: 50;0;1;0;47;21:12Which is great, that's a new feature to me :)
Now on the node side : I have included
void receive(const MyMessage & message) { if (message.type == V_TEXT) Serial.print(message.data); // or Serial.print(message.getString()); // works fine too }Serial monitor of node shows
21:12Lovely jobly sounds good
I am now facing two major problems to me as a noob:
- what is the format of "message.data" ? string? whenever i try to play with it i get some "invalid conversion" from IDE...
- how to split that "message.data" into two integers (alarmHour and alarmMin) ?
Thanks for your help ! That should be the final shout for help as this project is nearly achieved...
-
Can someone please comment on this DIY mess (it's a mix of bits and pieces found here and there)
void receive(const MyMessage & message) { if (message.type == V_LOCK_STATUS) setAlarmState(message.getBool(), false); if (message.type == V_TEXT) { char *alarmTime = message.data; char* token = strtok(alarmTime, ":"); alarmHour = atoi(token); token= strtok(NULL, ""); alarmMin = atoi(token); }It works the way I need it but i guess it's a dirty way of getting there... your eyes might start bleeding :D i get this from compiler :
warning: invalid conversion from 'const char*' to 'char*' [-fpermissive] char *alarmTime = message.data;Any suggestion to make it neater?
-
Can someone please comment on this DIY mess (it's a mix of bits and pieces found here and there)
void receive(const MyMessage & message) { if (message.type == V_LOCK_STATUS) setAlarmState(message.getBool(), false); if (message.type == V_TEXT) { char *alarmTime = message.data; char* token = strtok(alarmTime, ":"); alarmHour = atoi(token); token= strtok(NULL, ""); alarmMin = atoi(token); }It works the way I need it but i guess it's a dirty way of getting there... your eyes might start bleeding :D i get this from compiler :
warning: invalid conversion from 'const char*' to 'char*' [-fpermissive] char *alarmTime = message.data;Any suggestion to make it neater?
@ben999 message.data is const char* which means its contents can not (or at least should not) be modified.
Then you set the alarmTime pointer to point to the same message.data, which means that if you modify the contents of alarmTime you will also modify the contents of message.data (they are not two copies of the same thing, they are the same thing)
The definition of strtok ischar *strtok(char *restrict source, const char *restrict delimiters);which means the first parameter must allow modification (no const), while the second does not need modification.
The man page of strtok also says this (my emphasis):
The strtok function returns a pointer to the beginning of each subsequent token in the string, after replacing the separator character itself with a null character. When no more tokens remain, a null pointer is returned.
which explains why the parameter must allow modification.
That's why you can't doconst char *alarmTime = message.data;I am not a c expert, but I think you should do this instead:
void receive(const MyMessage & message) { if (message.type == V_LOCK_STATUS) setAlarmState(message.getBool(), false); if (message.type == V_TEXT) { char alarmTime[MAX_MESSAGE_LENGTH]; strncpy(alarmTime, message.data, MAX_MESSAGE_LENGTH); char* token = strtok(alarmTime, ":"); alarmHour = atoi(token); token = strtok(NULL, ""); alarmMin = atoi(token); } }MAX_MESSAGE_LENGTH is provided by the MySensors library.
-
@ben999 message.data is const char* which means its contents can not (or at least should not) be modified.
Then you set the alarmTime pointer to point to the same message.data, which means that if you modify the contents of alarmTime you will also modify the contents of message.data (they are not two copies of the same thing, they are the same thing)
The definition of strtok ischar *strtok(char *restrict source, const char *restrict delimiters);which means the first parameter must allow modification (no const), while the second does not need modification.
The man page of strtok also says this (my emphasis):
The strtok function returns a pointer to the beginning of each subsequent token in the string, after replacing the separator character itself with a null character. When no more tokens remain, a null pointer is returned.
which explains why the parameter must allow modification.
That's why you can't doconst char *alarmTime = message.data;I am not a c expert, but I think you should do this instead:
void receive(const MyMessage & message) { if (message.type == V_LOCK_STATUS) setAlarmState(message.getBool(), false); if (message.type == V_TEXT) { char alarmTime[MAX_MESSAGE_LENGTH]; strncpy(alarmTime, message.data, MAX_MESSAGE_LENGTH); char* token = strtok(alarmTime, ":"); alarmHour = atoi(token); token = strtok(NULL, ""); alarmMin = atoi(token); } }MAX_MESSAGE_LENGTH is provided by the MySensors library.
@mfalkvidd thank you very much for your detailed explanation !
It does make a lot of sense
And it compiles perfectly
Thanks again for taking the time to correct and explain :)
-
@mfalkvidd thank you very much for your detailed explanation !
It does make a lot of sense
And it compiles perfectly
Thanks again for taking the time to correct and explain :)
Full sketch
Some mods to come:- stop alarm while ringing
- snoze
//#define MY_DEBUG // Enable debug prints #define MY_RADIO_NRF24 // Enable and select radio type attached #define MY_PARENT_ID 0 #define MY_NODE_ID 50 #include <SPI.h> #include <Adafruit_GFX.h> #include <Adafruit_PCD8544.h> #include <MySensors.h> #include <Time.h> #include <Wtv020sd16p.h> #define ALARM_ID 0 // Id of TimeOfAlarm value #define ACTIV_ID 1 // Id of ActivateAlarm switch int resetPin = 5; // The pin number of the reset pin. int clockPin = 6; // The pin number of the clock pin. int dataPin = 7; // The pin number of the data pin. int busyPin = 8; // The pin number of the busy pin. static int pinA = 2; // Our first hardware interrupt pin is digital pin 2 static int pinB = 3; // Our second hardware interrupt pin is digital pin 3 static int enSW = 4; // Rotary switch push-button volatile byte aFlag = 0; // let's us know when we're expecting a rising edge on pinA to signal that the encoder has arrived at a detent volatile byte bFlag = 0; // let's us know when we're expecting a rising edge on pinB to signal that the encoder has arrived at a detent (opposite direction to when aFlag is set) volatile uint16_t encoderPos = 0; //this variable stores our current value of encoder position. Change to int or uin16_t instead of byte if you want to record a larger range than 0-255 volatile uint16_t oldEncPos = 0; //stores the last encoder position value so we can compare to the current reading and see if it has changed (so we know when to print to the serial monitor) volatile byte reading = 0; //somewhere to store the direct values we read from our interrupt pins before checking to see if we have moved a whole detent // Software SPI (slower updates, more flexible pin options): // pin 7 - Serial clock out (SCLK) // pin 6 - Serial data out (DIN) // pin 5 - Data/Command select (D/C) // pin 4 - LCD chip select (CS) // pin 8 - LCD reset (RST) Adafruit_PCD8544 display = Adafruit_PCD8544(A4, A3, A2, A1, A0); // Create an instance of the Wtv020sd16p class. // 1st parameter: Reset pin number. // 2nd parameter: Clock pin number. // 3rd parameter: Data pin number. // 4th parameter: Busy pin number. Wtv020sd16p wtv020sd16p(resetPin, clockPin, dataPin, busyPin); //Declare the Menus you need. char menu[][20] = {"ActiverAlarme", "Regler Alarme" , "Contra-ste", "Volume", "MusiqueAlarme", "EcouterMusique", "Retour" }; byte itemCount = 6; int itemSelected; byte runOnceAWeek = 1; //allow for time update once a week char dataBuffer[20]; // for sprintf function bool alarmStatus; // Alarm set/unset status int alarmHour = 0; int alarmMin = 0; int alarmTune = 1; unsigned int alarmVolume = 5; int contrast = 50; int backlightFlag = 0; int backlightCountdown = 10000; // switch off backlight after XX millisec int loopTime = 0; int prevMillis = 0; byte smallFont = 1; byte bigFont = 2; MyMessage textMsg(ALARM_ID, V_TEXT); // Initialize clock messages MyMessage alarmMsg(ACTIV_ID, V_LOCK_STATUS); // Initialize switch messages void presentation() { sendSketchInfo("Loulou's Clock", "25.07.2017"); present(ALARM_ID, S_INFO); present(ACTIV_ID, S_LOCK); } void setup() { wtv020sd16p.reset(); //MP3 player delay(1000); wtv020sd16p.setVolume(alarmVolume); pinMode(A5, OUTPUT); //5110 screen backlight digitalWrite(A5, LOW); display.begin(); pinMode(enSW, INPUT_PULLUP); pinMode(pinA, INPUT_PULLUP); pinMode(pinB, INPUT_PULLUP); attachInterrupt(0, PinA, RISING); attachInterrupt(1, PinB, RISING); Serial.begin(115200); display.setContrast(contrast); display.display(); display.clearDisplay(); display.setTextColor(BLACK); int clockCounter = 0; while (timeStatus() == timeNotSet && clockCounter < 60) { requestTime(); clockCounter++; wait(1000); /* Serial.print("état reception:"); Serial.println(timeStatus()); */ if (clockCounter > 16) { /* Serial.print(F("**Failed Clock**")); Serial.print(F("*Syncronization*")); */ break; } } alarmStatus = loadState(0); // Read last lock status from eeprom setAlarmState(alarmStatus, true); // Now set the last known state and send it to controller sendTime(); } void loop() { /*** ALARM !!! ***/ while (hour() + 2 == alarmHour && minute() == alarmMin) { digitalWrite(A5, LOW); // switch backlight ON when entering menu display.clearDisplay(); display.setTextSize(1); display.setCursor(2, 2); display.print("Debout Axou"); display.display(); display.setCursor(2, 20); display.print("Faut y aller"); display.display(); display.setCursor(2, 40); sprintf(dataBuffer, "Il est %02u:%02u ", hour() + 2, minute()); display.print(dataBuffer); display.display(); wtv020sd16p.playVoice(alarmTune - 1); } /*** synchronise clock node with controller from time to time... ***/ if (weekday() == 5 && runOnceAWeek == 1) { requestTime(); runOnceAWeek = 0; } if (weekday() != 5) runOnceAWeek = 1; /*** switch off backlight function ***/ loopTime = millis() - prevMillis; prevMillis = millis(); backlightFlag = backlightFlag + loopTime; if (backlightFlag > backlightCountdown) { digitalWrite(A5, HIGH); backlightFlag = backlightCountdown + 1; // to avoid overflow } else digitalWrite(A5, LOW); /*** Show time on the default Screen ***/ display.clearDisplay(); display.setTextSize(2); display.setCursor(14, 2); sprintf(dataBuffer, "%02u:%02u ", hour() + 2, minute()); display.print(dataBuffer); //display.display(); display.setTextSize(1); display.setCursor(14, 22); sprintf(dataBuffer, "%02u-%02u-%04u ", day(), month(), year()); display.print(dataBuffer); display.display(); if (alarmStatus == 0) { //Show whether alarm is on or off display.setCursor(14, 35); sprintf(dataBuffer, "Alarme OFF"); } else { display.setCursor(7, 35); char alarmText[7] = "Alarme"; sprintf(dataBuffer, "%s %02u:%02u", alarmText, alarmHour, alarmMin); } display.print(dataBuffer); display.display(); /*** Enter the settings menu if select Switch is pressed ***/ if (digitalRead(enSW) == 0) { while (digitalRead(enSW) == 0); //wait till switch is released. encoderPos = 0; digitalWrite(A5, LOW); // switch backlight ON when entering menu switch (encoderPos) { //Enter main program case 0: display.clearDisplay(); display.setTextSize(2); display.setCursor(0, 10); display.println(menu[encoderPos]); display.display(); while (digitalRead(enSW)) { encoderPos = constrain(encoderPos, 0, itemCount); display.clearDisplay(); display.setCursor(0, 0); display.println(menu[encoderPos]); if (encoderPos < 0) encoderPos = itemCount; if (encoderPos > itemCount) encoderPos = 0; display.display(); } while (digitalRead(enSW) == 0); itemSelected = encoderPos; default: break; } switch (itemSelected) { case 0: display.clearDisplay(); //ACTIVATE ALARME display.setTextSize(bigFont); display.setCursor(0, 10); display.println(menu[itemSelected]); display.display(); encoderPos = alarmStatus; while (digitalRead(enSW)) { encoderPos = constrain(encoderPos, 0, 1); display.clearDisplay(); display.setCursor(0, 0); display.print(menu[itemSelected]); display.setCursor(16, 34); display.print(encoderPos); if (encoderPos == 0) { sprintf(dataBuffer, "OFF"); } else { sprintf(dataBuffer, "ON"); } display.setCursor(45, 34); display.print(dataBuffer); display.display(); } if (encoderPos != alarmStatus) { alarmStatus = encoderPos; send(alarmMsg.set(alarmStatus)); } while (digitalRead(enSW) == 0); break; case 1: display.clearDisplay(); //SET ALARME TIME display.setTextSize(bigFont); display.setCursor(0, 10); display.print(menu[itemSelected]); display.display(); encoderPos = alarmHour; while (digitalRead(enSW)) { //SET ALARME HOUR encoderPos = constrain(encoderPos, 00, 23); display.clearDisplay(); display.setCursor(0, 0); display.print(menu[itemSelected]); display.setCursor(10, 34); //HOUR LOCATION display.print(encoderPos); if (encoderPos < 0) encoderPos = 23; if (encoderPos > 23) encoderPos = 0; display.setCursor(35, 34); // ":" LOCATION display.print(":"); display.setCursor(50, 34); //MINUTE LOCATION display.print(alarmMin); display.display(); } if (encoderPos != alarmHour) { alarmHour = encoderPos; sendTime(); } encoderPos = alarmMin; while (digitalRead(enSW)) { //SET ALARME MINUTE encoderPos = constrain(encoderPos, 00, 59); display.clearDisplay(); display.setCursor(0, 0); display.print(menu[itemSelected]); display.setCursor(10, 34); //HOUR LOCATION display.print(alarmHour); display.setCursor(35, 34); //":" LOCATION display.print(":"); display.setCursor(50, 34); //MINUTE LOCATION display.print(encoderPos); if (encoderPos < 0) encoderPos = 59; if (encoderPos > 59) encoderPos = 0; display.display(); } if (encoderPos != alarmMin) { alarmMin = encoderPos; sendTime(); } while (digitalRead(enSW) == 0); break; case 2: display.clearDisplay(); //CONTRAST display.setTextSize(bigFont); display.setCursor(0, 10); display.print(menu[itemSelected]); display.display(); encoderPos = contrast; while (digitalRead(enSW)) { encoderPos = constrain(encoderPos, 0, 100); display.clearDisplay(); display.setCursor(0, 0); display.print(menu[itemSelected]); display.setCursor(16, 16); display.print(encoderPos); if (encoderPos < 0) encoderPos = 100; if (encoderPos > 100) encoderPos = 0; display.setContrast(encoderPos); display.display(); } if (encoderPos != contrast) contrast = encoderPos; while (digitalRead(enSW) == 0); break; case 3: display.clearDisplay(); //VOLUME display.setTextSize(smallFont); display.setCursor(0, 10); display.print(menu[itemSelected]); display.display(); encoderPos = alarmVolume; while (digitalRead(enSW)) { encoderPos = constrain(encoderPos, 0, 7); display.clearDisplay(); display.setCursor(0, 0); display.print(menu[itemSelected]); display.setCursor(16, 34); display.print(encoderPos); if (encoderPos < 0) encoderPos = 7; if (encoderPos > 7) encoderPos = 0; display.display(); wtv020sd16p.setVolume(encoderPos); } alarmVolume = encoderPos; while (digitalRead(enSW) == 0); break; case 4: display.clearDisplay(); //ALARM TUNE display.setTextSize(bigFont); display.setCursor(0, 10); display.print(menu[itemSelected]); display.display(); encoderPos = alarmTune; while (digitalRead(enSW)) { encoderPos = constrain(encoderPos, 1, 10); display.clearDisplay(); display.setCursor(0, 0); display.print(menu[itemSelected]); display.setCursor(16, 34); display.print(encoderPos); if (encoderPos < 1) encoderPos = 10; if (encoderPos > 10) encoderPos = 0; display.display(); } alarmTune = encoderPos; while (digitalRead(enSW) == 0); break; case 5: display.clearDisplay(); //PLAYER display.setTextSize(bigFont); display.setCursor(0, 10); display.print(menu[itemSelected]); display.display(); encoderPos = 0; while (digitalRead(enSW)) { encoderPos = constrain(encoderPos, 0, 10); display.clearDisplay(); display.setCursor(0, 0); display.print(menu[itemSelected]); display.setCursor(16, 34); display.print(encoderPos); if (encoderPos < 0) encoderPos = 10; if (encoderPos > 10) encoderPos = 0; display.display(); } if (encoderPos == 0) wtv020sd16p.stopVoice(); else wtv020sd16p.playVoice(encoderPos - 1); while (digitalRead(enSW) == 0); break; default: break; } } } /*** receive a new time value ***/ void receiveTime(unsigned long controllerTime) { setTime(controllerTime); } /*** send alarm time to controller ****/ void sendTime() { sprintf(dataBuffer, "%02u:%02u ", alarmHour, alarmMin); send(textMsg.set(dataBuffer)); wait(1000); } /*** Activate alarm ***/ void setAlarmState(bool state, bool doSend) { if (doSend) send(alarmMsg.set(state)); saveState(0, state); alarmStatus = state; } /*** receive alarme state from controller ***/ void receive(const MyMessage & message) { if (message.type == V_LOCK_STATUS) setAlarmState(message.getBool(), false); if (message.type == V_TEXT) { char alarmTime[MAX_MESSAGE_LENGTH]; strncpy(alarmTime, message.data, MAX_MESSAGE_LENGTH); char* token = strtok(alarmTime, ":"); alarmHour = atoi(token); token = strtok(NULL, ""); alarmMin = atoi(token); } } /*** rotary encoder interrupt function ***/ void PinA() { cli(); //stop interrupts happening before we read pin values reading = PIND & 0xC; // read all eight pin values then strip away all but pinA and pinB's values if (reading == B00001100 && aFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge encoderPos --; //decrement the encoder's position count bFlag = 0; //reset flags for the next turn aFlag = 0; //reset flags for the next turn backlightFlag = 0; } else if (reading == B00000100) bFlag = 1; //signal that we're expecting pinB to signal the transition to detent from free rotation sei(); //restart interrupts } void PinB() { cli(); //stop interrupts happening before we read pin values reading = PIND & 0xC; //read all eight pin values then strip away all but pinA and pinB's values if (reading == B00001100 && bFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge encoderPos ++; //increment the encoder's position count bFlag = 0; //reset flags for the next turn aFlag = 0; //reset flags for the next turn backlightFlag = 0; } else if (reading == B00001000) aFlag = 1; //signal that we're expecting pinA to signal the transition to detent from free rotation sei(); //restart interrupts }``` -
Hi I need your help, I created this clock and complied the sketch, looked like it worked but when adding it to very I get the error message that D_LcdText1.xml is not available. Where do I find that and how do i add it to the Vera Plus?
Excellent project and can't wait to have it up and running.
-
Hi I need your help, I created this clock and complied the sketch, looked like it worked but when adding it to very I get the error message that D_LcdText1.xml is not available. Where do I find that and how do i add it to the Vera Plus?
Excellent project and can't wait to have it up and running.
@Newzwaver you can find the needed files here
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login