Thanks to http://quo.vadis.stojkovic.ch/hacking-a-weighing-scale/ and http://troels.leegaard.org/misc/grundtal20047/ I hacked Momert 5848-9 bathroom scale http://momert.eu/index.php/en/products?page=shop.product_details&flypage=flypage.tpl&category_id=16&product_id=158
Pin arrangement the same as on IKEA Grundtal scales http://troels.leegaard.org/misc/grundtal20047/grundtal20047.pdf
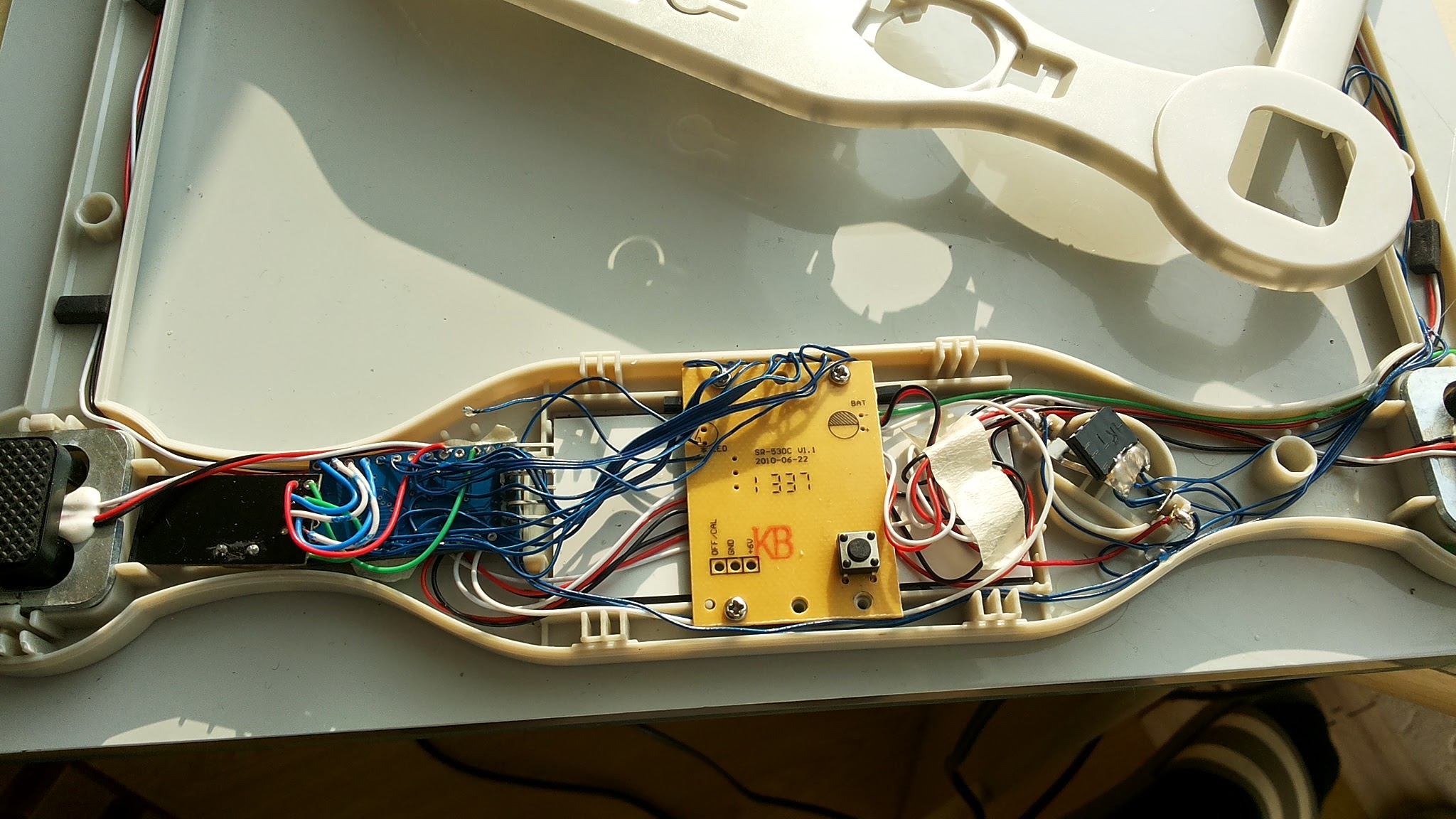
Putting 3V to each lcd pin you can figure out what is each pin for. I used 13 lcd pins from 16. https://www.youtube.com/watch?v=yGe3wtwzqf0
Some photos 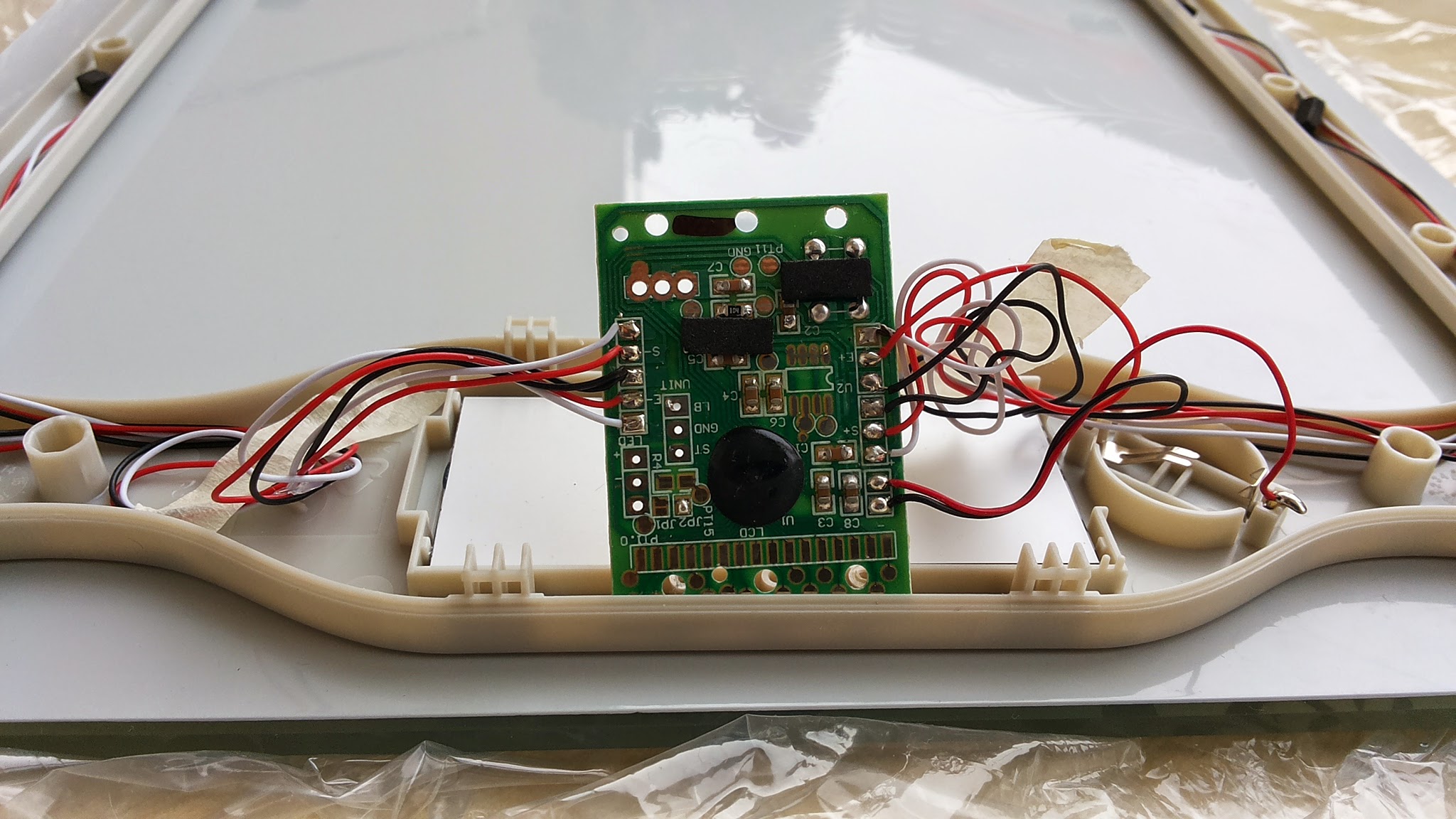

CODE:
#include <Sleep_n0m1.h>
#include <SPI.h>
#include <EEPROM.h>
#include <RF24.h>
#include <Sensor.h>
#define DIGITAL_INPUT_SENSOR 3 // The digital input you attached your motion sensor. (Only 2 and 3 generates interrupt!)
#define INTERRUPT DIGITAL_INPUT_SENSOR-2 // Usually the interrupt = pin -2 (on uno/nano anyway)
#define DI_ID 1 // Id of the sensor child
#define SA_ID 2 // Id of the sensor child
#define VI_ID 3 // Id of the sensor child
#define ALL_ID 4 // Id of the sensor child
#define DEBUG 1
int pa,pb,pc,pd;
int lcdA=0,lcdB=0,lcdC=0,lcdD=0;
bool lcd1,lcd2,lcd3,lcd4,lcd5,lcd6,lcd7,lcd8,lcd9;
unsigned int SAn, SBn, SCn, SDn;
unsigned int SA[9], SB[9], SC[9], SD[9];
bool A[9], B[9], C[9], D[9];
double weight;
double oldweight=0;
Sensor gw;
Sleep sleep;
//calculate weight
int getDigit(int d)
{
// d=0,1,2,3
int i = 2*d+0;
int j = 2*d+1;
if ( A[i] && A[j] && !B[i] && B[j] && C[i] && C[j] && D[i]) return 0; //ok
if (!A[i] && !A[j] && !B[i] && B[j] && !C[i] && C[j] && !D[i]) return 1; //ok
if (!A[i] && A[j] && B[i] && B[j] && C[i] && !C[j] && D[i]) return 2; //ok
if (!A[i] && A[j] && B[i] && B[j] && !C[i] && C[j] && D[i]) return 3; //ok
if ( A[i] && !A[j] && B[i] && B[j] && !C[i] && C[j] && !D[i]) return 4; //ok
if ( A[i] && A[j] && B[i] && !B[j] && !C[i] && C[j] && D[i]) return 5; //ok
if ( A[i] && A[j] && B[i] && !B[j] && C[i] && C[j] && D[i]) return 6; //ok
if (!A[i] && A[j] && !B[i] && B[j] && !C[i] && C[j] && !D[i]) return 7; //ok
if ( A[i] && A[j] && B[i] && B[j] && C[i] && C[j] && D[i]) return 8; //ok
if ( A[i] && A[j] && B[i] && B[j] && !C[i] && C[j] && D[i]) return 9; //ok
return 0;
}
void setup()
{
gw.begin();
// Send the sketch version information to the gateway and Controller
gw.sendSketchInfo("Weight Meter", "1.0");
pinMode(DIGITAL_INPUT_SENSOR, INPUT); // sets the motion sensor digital pin as input
// Register all sensors to gw (they will be created as child devices)
gw.sendSensorPresentation(DI_ID, S_WEIGHT);
gw.sendSensorPresentation(SA_ID, S_WEIGHT);
gw.sendSensorPresentation(VI_ID, S_WEIGHT);
gw.sendSensorPresentation(ALL_ID, S_WEIGHT);
}
void loop()
{
getweightnow();
#if DEBUG
Serial.println("Sleeping.");
#endif
delay(400); //delay to allow serial to fully print before sleep
gw.powerDown();
sleep.pwrDownMode(); //set sleep mode
sleep.sleepInterrupt(INTERRUPT,CHANGE);
}
void getweightnow() {
lcdA = analogRead(A0);
lcdB = analogRead(A1);
lcdC = analogRead(A2);
lcdD = analogRead(A3);
// waiting for display (interruption will continue from here)
#if DEBUG
Serial.println("Stepped on scale");
#endif
// make sure that LCD is active
// starts measuring
#if DEBUG
Serial.println("Mesuring");
#endif
SAn = SBn = SCn = SDn = 0;
for (int i=0; i<9; i++)
SA[i] = SB[i] = SC[i] = SD[i] = 0;
int i=0;
//run while backplanes are active
while ((lcdA!=0 || lcdB!=0 || lcdC!=0 || lcdD!=0)) {
lcdA = analogRead(A0);
lcdB = analogRead(A1);
lcdC = analogRead(A2);
lcdD = analogRead(A3);
lcd1 = digitalRead(A4);
lcd2 = digitalRead(A5);
lcd3 = digitalRead(2);
lcd4 = digitalRead(3);
lcd5 = digitalRead(4);
lcd6 = digitalRead(5);
lcd7 = digitalRead(6);
lcd8 = digitalRead(7);
lcd9 = digitalRead(8);
// decode A, B, C and D signals to -1, 0, 1
pa = 0;
if (lcdA < 300) pa=-1; else if (lcdA > 600) pa=1;
pb = 0;
if (lcdB < 300) pb=-1; else if (lcdB > 600) pb=1;
pc = 0;
if (lcdC < 300) pc=-1; else if (lcdC > 600) pc=1;
pd = 0;
if (lcdD < 300) pd=-1; else if (lcdD > 600) pd=1;
lcdA = pa; lcdB = pb; lcdC = pc; lcdD = pd;
if (lcdA!=0 && lcdB==0 && lcdC==0 && lcdD==0 ||
lcdA==0 && lcdB!=0 && lcdC==0 && lcdD==0 ||
lcdA==0 && lcdB==0 && lcdC!=0 && lcdD==0 ||
lcdA==0 && lcdB==0 && lcdC==0 && lcdD!=0)
{
if (lcdA==1 || lcdB==1 || lcdC==1 || lcdD==1)
{
lcd1 = 1-lcd1;
lcd2 = 1-lcd2;
lcd3 = 1-lcd3;
lcd4 = 1-lcd4;
lcd5 = 1-lcd5;
lcd6 = 1-lcd6;
lcd7 = 1-lcd7;
lcd8 = 1-lcd8;
lcd9 = 1-lcd9;
}
if (lcdA != 0)
{
SA[0] += lcd1;
SA[1] += lcd2;
SA[2] += lcd3;
SA[3] += lcd4;
SA[4] += lcd5;
SA[5] += lcd6;
SA[6] += lcd7;
SA[7] += lcd8;
SA[8] += lcd9;
SAn++;
}
if (lcdB != 0)
{
SB[0] += lcd1;
SB[1] += lcd2;
SB[2] += lcd3;
SB[3] += lcd4;
SB[4] += lcd5;
SB[5] += lcd6;
SB[6] += lcd7;
SB[7] += lcd8;
SB[8] += lcd9;
SBn++;
}
if (lcdC!=0)
{
SC[0] += lcd1;
SC[1] += lcd2;
SC[2] += lcd3;
SC[3] += lcd4;
SC[4] += lcd5;
SC[5] += lcd6;
SC[6] += lcd7;
SC[7] += lcd8;
SC[8] += lcd9;
SCn++;
}
if (lcdD!=0)
{
SD[0] += lcd1;
SD[1] += lcd2;
SD[2] += lcd3;
SD[3] += lcd4;
SD[4] += lcd5;
SD[5] += lcd6;
SD[6] += lcd7;
SD[7] += lcd8;
SD[8] += lcd9;
SDn++;
}
i++;
}
if (lcdA==-1 && lcdB==-1 && lcdC==-1 && lcdD==-1 && lcd9==0 && (SA[0]+SA[1]+SA[2]+SA[3]+SA[4]+SA[5]+SA[6]+SA[7]+SA[8]>0)) {
// measuring is done
#if DEBUG
Serial.println("Done");
#endif
// finding the average of signals values during measuring period
// not 100% correct, but the fastest way I could think of
for (int i=0;i<9;i++)
{
A[i] = (1.0 * SA[i] / SAn >0.5);
B[i] = (1.0 * SB[i] / SBn >0.5);
C[i] = (1.0 * SC[i] / SCn >0.5);
D[i] = (1.0 * SD[i] / SDn >0.5);
}
// decoding
float weight = 100.0*getDigit(0) + 10.0*getDigit(1) + 1.0*getDigit(2) + 0.1*getDigit(3);
#if DEBUG
Serial.print("Weight is: ");
Serial.println(weight);
#endif
if (weight != oldweight) {
gw.sendVariable(DI_ID, V_WEIGHT, weight,3); // Send volume value to gw
#if DEBUG
Serial.println("Sent");
#endif
oldweight = weight;
}
break;
} //end of if
} //end of while
}
And now is the question S_WEIGHT sensor-type are working on MySensors Arduino Library (v1.3) and VERA Lite as controller. Or do i need *Sensor1.json *Sensor1.xml files for it working? Because when i included scales node to Vera and restarted Luup, after that all nodes stoped working. Only restoring VERA from backup are helped.