💬 Various bootloader files based on Optiboot 6.2
-
@Samuel235
Sorry for my english, your answer is ok Tanks you@mar.conte - Its okay, i understood you, just about ;)
Now just apply that description to all of the other bootloader varients that the great @Gertsanders has provided us with :)
-
I'm sorry, i don't understand the issue at hand.... Could you attempt to explain any clearer?
@Samuel235
Hy
My project is simple atmega328 with internal clock 8 mhz in powerdown mode end rfm69 hw which send to gateway when pir motion is high powered all with 2 aa battery.
The First test what i do is in breadboard atmega328 with optiboot 6.2 ( i have upload bootloader 8mhz internal , 38vk, bod 2v7) and simple sketch j gammon: result no microampere but around 2/5 mah in sleep mode; -
@Samuel235
Hy
My project is simple atmega328 with internal clock 8 mhz in powerdown mode end rfm69 hw which send to gateway when pir motion is high powered all with 2 aa battery.
The First test what i do is in breadboard atmega328 with optiboot 6.2 ( i have upload bootloader 8mhz internal , 38vk, bod 2v7) and simple sketch j gammon: result no microampere but around 2/5 mah in sleep mode;@mar.conte I'm not familiar with the sketch you mentioned. The best is to use the voltmeter and oscillograph to determine consumption.
Why do you have BOD 2.7v? I do not have any BOD - this would let a node to run on two batteries until voltage drops to below 1.9V
-
@mar.conte I'm not familiar with the sketch you mentioned. The best is to use the voltmeter and oscillograph to determine consumption.
Why do you have BOD 2.7v? I do not have any BOD - this would let a node to run on two batteries until voltage drops to below 1.9V
-
@alexsh1
I have only voltmeter extec, can i mesure ua?
Can you send simple sketch for deep sleep ?@mar.conte - Are you basically saying that your hardware is using too much power to enable you to run on battery for any substantial time?
MySensors 2.1.1
Controller - OpenHAB (Virtual Machine)
Gateway - Arduino Mega MQTT Gateway W5100 -
@mar.conte - Are you basically saying that your hardware is using too much power to enable you to run on battery for any substantial time?
-
@Samuel235
Yes, i want obtain few micro amp but its two month wich i try without result.....@mar.conte Which skecth did you use ?
Did you have radio errors in your log ? -
Could you please either include your sketch here or give us a link to the example sketch that you used please.
@Samuel235
Resolved
I have try with sketc j gammon https://www.gammon.com.au/forum/?id=11497
And the problem are pir input (model hrc-501)
Are ever high and the cpu dont go in sleep.
I have remove pir and all ok the atmega run 20 uah very good.
Can you advise a good pir wich run to 3,3 V for my project?
Tanks -
@Samuel235
Resolved
I have try with sketc j gammon https://www.gammon.com.au/forum/?id=11497
And the problem are pir input (model hrc-501)
Are ever high and the cpu dont go in sleep.
I have remove pir and all ok the atmega run 20 uah very good.
Can you advise a good pir wich run to 3,3 V for my project?
Tanks@mar.conte
im not sure why pir with simple test like this http://playground.arduino.cc/Code/PIRsense is ok
but with my sketch the cpu reset forever#include <Arduino.h> // assumes Arduino IDE v1.0 or greater #include <avr/sleep.h> #include <avr/wdt.h> #include <avr/power.h> #include <avr/io.h> ISR (PCINT2_vect) { // handle pin change interrupt for D0 to D7 here } // end of PCINT2_vect const unsigned long WAIT_TIME = 4000; const byte LED =8 ; const byte LED2 =9 ; int wakepin =3 ; unsigned long lastSleep; volatile boolean motionDetected=false; float batteryVolts = 5; char BATstr[10]; //longest battery voltage reading message = 9chars char sendBuf[32]; byte sendLen; void checkBattery(void); #include <RFM69.h> //get it here: https://www.github.com/lowpowerlab/rfm69 #include <SPI.h> //********************************************************************************************* // *********** IMPORTANT SETTINGS - YOU MUST CHANGE/ONFIGURE TO FIT YOUR HARDWARE ************* //********************************************************************************************* #define NETWORKID 100 // The same on all nodes that talk to each other #define NODEID 2 // The unique identifier of this node #define RECEIVER 1 // The recipient of packets //Match frequency to the hardware version of the radio on your Feather //#define FREQUENCY RF69_433MHZ //#define FREQUENCY RF69_868MHZ #define FREQUENCY RF69_868MHZ #define ENCRYPTKEY "sampleEncryptKey" //exactly the same 16 characters/bytes on all nodes! #define IS_RFM69HW true // set to 'true' if you are using an RFM69HCW module //********************************************************************************************* #define SERIAL_BAUD 115200 #define RFM69_CS 10 #define RFM69_IRQ 2 #define RFM69_IRQN 0 // Pin 2 is IRQ 0! #define RFM69_RST 9 int16_t packetnum = 0; // packet counter, we increment per xmission RFM69 radio = RFM69(RFM69_CS, RFM69_IRQ, IS_RFM69HW, RFM69_IRQN); void setup () { pinMode (wakepin,INPUT); pinMode(LED, OUTPUT); pinMode(LED2, OUTPUT); digitalWrite(wakepin,HIGH); char buff[50]; Serial.begin(SERIAL_BAUD); Serial.println("Arduino RFM69HCW Transmitter"); // Hard Reset the RFM module pinMode(RFM69_RST, OUTPUT); digitalWrite(RFM69_RST, HIGH); delay(100); digitalWrite(RFM69_RST, LOW); delay(100); // Initialize radio radio.initialize(FREQUENCY,NODEID,NETWORKID); if (IS_RFM69HW) { radio.setHighPower(); // Only for RFM69HCW & HW! } radio.setPowerLevel(31); // power output ranges from 0 (5dBm) to 31 (20dBm) radio.encrypt(ENCRYPTKEY); pinMode(LED, OUTPUT); Serial.print("\nTransmitting at "); Serial.print(FREQUENCY==RF69_433MHZ ? 433 : FREQUENCY==RF69_868MHZ ? 868 : 915); Serial.println(" MHz"); } uint16_t batteryReportCycles=0; void loop () { //rf(); sleepNow(); rf(); //radio.sleep(); // sleep function called here radio.sleep(); } void wake () { // cancel sleep as a precaution //sleep_disable(); // precautionary while we do other stuff detachInterrupt (1); } // end of wake void sleepNow() { if (millis () - lastSleep >= WAIT_TIME) { lastSleep = millis (); byte old_ADCSRA = ADCSRA; // disable ADC ADCSRA = 0; // pin change interrupt (example for D0) PCMSK2 |= bit (PCINT16); // want pin 0 PCIFR |= bit (PCIF2); // clear any outstanding interrupts PCICR |= bit (PCIE2); // enable pin change interrupts for D0 to D7 set_sleep_mode (SLEEP_MODE_PWR_DOWN); power_adc_disable(); power_spi_disable(); power_timer0_disable(); power_timer1_disable(); power_timer2_disable(); power_twi_disable(); //PORTB = 0x00; UCSR0B &= ~bit (RXEN0); // disable receiver UCSR0B &= ~bit (TXEN0); // disable transmitter sleep_enable(); noInterrupts (); attachInterrupt (1, wake,HIGH); digitalWrite (LED, LOW); interrupts (); sleep_cpu (); digitalWrite (LED, HIGH); sleep_disable(); power_all_enable(); ADCSRA = old_ADCSRA; PCICR &= ~bit (PCIE2); // disable pin change interrupts for D0 to D7 UCSR0B |= bit (RXEN0); // enable receiver UCSR0B |= bit (TXEN0); // enable transmitter } // end of time to sleep } void rf() { char radiopacket[20] = "Hello World #"; itoa(packetnum++, radiopacket+13, 10); Serial.print("Sending "); Serial.println(radiopacket); if (!radio.sendWithRetry(RECEIVER, radiopacket, strlen(radiopacket))) { //target node Id, message as string or byte array, message length Serial.println("OK"); } radio.receiveDone(); //put radio in RX mode Serial.flush(); //make sure all serial data is clocked out before sleeping the MCU } -
Firstly, i can't read the structure the way you have posted your sketch. You should use the code function in the reply, the icon looks like "</>" above where you make your reply. Put your code in there for us to have any chance of reading it at all.
Secondly, I don't think that this is the place to be posting this issue. For a start, this isn't an issue relevant to the bootloader in this thread and secondly, it doesn't even have anything to do with MySensors.
-
@alexsh1
I have only voltmeter extec, can i mesure ua?
Can you send simple sketch for deep sleep ?@mar.conte yes, you can measure consumption (should be in uA) while sleeping with a good voltmeter.
However, I really fail to understand what has Nick's sketch you mentioned to do with MySensors? I suppose some people here may be aware of sleeping issues, but again your problem has nothing to do with MySensors.
Please see the following - it may help you troubleshoot your issue
https://www.mysensors.org/build/battery -
Firstly, i can't read the structure the way you have posted your sketch. You should use the code function in the reply, the icon looks like "</>" above where you make your reply. Put your code in there for us to have any chance of reading it at all.
Secondly, I don't think that this is the place to be posting this issue. For a start, this isn't an issue relevant to the bootloader in this thread and secondly, it doesn't even have anything to do with MySensors.
@Samuel235
I wanted to build my projects with mysensors, first of all I started with bootloader found in this section to try them with examples that I know because I do not know yet mysensors, I wanted to learn it so I took the liberty to insert code in your section. if you can figure out my problem thank you or I apologize for the trouble thanks -
I get why you done it, but i don't understand why. You don't need to 'know' mysensors.... There is a getting started page, i suggest you take a few hours and read through everything. I'm not helping with an issue that is completely not related to mysensors while on the mysensors forum. Just simply for future readers of this thread that come here to solve their issue, if this thread is bloated out with over 10/20 replies that is not related to the question at hand its much harder for them to find their resolution here. I suggest contacting the author of the code himself as i'm pretty sure that your issue is not the bootloader.
MySensors 2.1.1
Controller - OpenHAB (Virtual Machine)
Gateway - Arduino Mega MQTT Gateway W5100 -
I get why you done it, but i don't understand why. You don't need to 'know' mysensors.... There is a getting started page, i suggest you take a few hours and read through everything. I'm not helping with an issue that is completely not related to mysensors while on the mysensors forum. Just simply for future readers of this thread that come here to solve their issue, if this thread is bloated out with over 10/20 replies that is not related to the question at hand its much harder for them to find their resolution here. I suggest contacting the author of the code himself as i'm pretty sure that your issue is not the bootloader.
Thanks anyway, this section introduced me to some very interesting bootloader, at least with these bootloader I can get a few microamperes for my projects, I will take note of your good day and thank you tips
-
Hi guys,
I am getting an errror when trying to burn the bootloader, any idea what´s wrong? Im using Arduino IDE 1.6.10 and these settings:
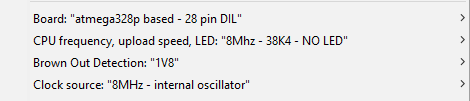
and that´s the error:
avrdude: Version 6.3, compiled on Jun 22 2016 at 16:05:21 Copyright (c) 2000-2005 Brian Dean, http://www.bdmicro.com/ Copyright (c) 2007-2014 Joerg Wunsch System wide configuration file is "T:\Programme\Arduino 1.6.10\hardware\tools\avr/etc/avrdude.conf" Using Port : COM10 Using Programmer : stk500v1 Overriding Baud Rate : 19200 AVR Part : ATmega328P Chip Erase delay : 9000 us PAGEL : PD7 BS2 : PC2 RESET disposition : dedicated RETRY pulse : SCK serial program mode : yes parallel program mode : yes Timeout : 200 StabDelay : 100 CmdexeDelay : 25 SyncLoops : 32 ByteDelay : 0 PollIndex : 3 PollValue : 0x53 Memory Detail : Block Poll Page Polled Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack ----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- --------- eeprom 65 20 4 0 no 1024 4 0 3600 3600 0xff 0xff flash 65 6 128 0 yes 32768 128 256 4500 4500 0xff 0xff lfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 hfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 efuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 lock 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00 signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00 Programmer Type : STK500 Description : Atmel STK500 Version 1.x firmware Hardware Version: 2 Firmware Version: 1.18 Topcard : Unknown Vtarget : 0.0 V Varef : 0.0 V Oscillator : Off SCK period : 0.1 us avrdude: AVR device initialized and ready to accept instructions Reading | ################################################## | 100% 0.06s avrdude: Device signature = 0x1e950f (probably m328p) avrdude: erasing chip avrdude: reading input file "0x3F" avrdude: writing lock (1 bytes): Writing | ################################################## | 100% 0.03s avrdude: 1 bytes of lock written avrdude: verifying lock memory against 0x3F: avrdude: load data lock data from input file 0x3F: avrdude: input file 0x3F contains 1 bytes avrdude: reading on-chip lock data: Reading | ################################################## | 100% 0.02s avrdude: verifying ... avrdude: 1 bytes of lock verified avrdude: reading input file "0x06" avrdude: writing efuse (1 bytes): Writing | ***failed; ################################################## | 100% 0.16s avrdude: 1 bytes of efuse written avrdude: verifying efuse memory against 0x06: avrdude: load data efuse data from input file 0x06: avrdude: input file 0x06 contains 1 bytes avrdude: reading on-chip efuse data: Fehler beim Brennen des Bootloaders. Reading | ################################################## | 100% 0.02s avrdude: verifying ... avrdude: verification error, first mismatch at byte 0x0000 0xfe != 0x06 avrdude: verification error; content mismatch avrdude done. Thank you.still learning...
-
Hi guys,
I am getting an errror when trying to burn the bootloader, any idea what´s wrong? Im using Arduino IDE 1.6.10 and these settings:
and that´s the error:
avrdude: Version 6.3, compiled on Jun 22 2016 at 16:05:21 Copyright (c) 2000-2005 Brian Dean, http://www.bdmicro.com/ Copyright (c) 2007-2014 Joerg Wunsch System wide configuration file is "T:\Programme\Arduino 1.6.10\hardware\tools\avr/etc/avrdude.conf" Using Port : COM10 Using Programmer : stk500v1 Overriding Baud Rate : 19200 AVR Part : ATmega328P Chip Erase delay : 9000 us PAGEL : PD7 BS2 : PC2 RESET disposition : dedicated RETRY pulse : SCK serial program mode : yes parallel program mode : yes Timeout : 200 StabDelay : 100 CmdexeDelay : 25 SyncLoops : 32 ByteDelay : 0 PollIndex : 3 PollValue : 0x53 Memory Detail : Block Poll Page Polled Memory Type Mode Delay Size Indx Paged Size Size #Pages MinW MaxW ReadBack ----------- ---- ----- ----- ---- ------ ------ ---- ------ ----- ----- --------- eeprom 65 20 4 0 no 1024 4 0 3600 3600 0xff 0xff flash 65 6 128 0 yes 32768 128 256 4500 4500 0xff 0xff lfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 hfuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 efuse 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 lock 0 0 0 0 no 1 0 0 4500 4500 0x00 0x00 calibration 0 0 0 0 no 1 0 0 0 0 0x00 0x00 signature 0 0 0 0 no 3 0 0 0 0 0x00 0x00 Programmer Type : STK500 Description : Atmel STK500 Version 1.x firmware Hardware Version: 2 Firmware Version: 1.18 Topcard : Unknown Vtarget : 0.0 V Varef : 0.0 V Oscillator : Off SCK period : 0.1 us avrdude: AVR device initialized and ready to accept instructions Reading | ################################################## | 100% 0.06s avrdude: Device signature = 0x1e950f (probably m328p) avrdude: erasing chip avrdude: reading input file "0x3F" avrdude: writing lock (1 bytes): Writing | ################################################## | 100% 0.03s avrdude: 1 bytes of lock written avrdude: verifying lock memory against 0x3F: avrdude: load data lock data from input file 0x3F: avrdude: input file 0x3F contains 1 bytes avrdude: reading on-chip lock data: Reading | ################################################## | 100% 0.02s avrdude: verifying ... avrdude: 1 bytes of lock verified avrdude: reading input file "0x06" avrdude: writing efuse (1 bytes): Writing | ***failed; ################################################## | 100% 0.16s avrdude: 1 bytes of efuse written avrdude: verifying efuse memory against 0x06: avrdude: load data efuse data from input file 0x06: avrdude: input file 0x06 contains 1 bytes avrdude: reading on-chip efuse data: Fehler beim Brennen des Bootloaders. Reading | ################################################## | 100% 0.02s avrdude: verifying ... avrdude: verification error, first mismatch at byte 0x0000 0xfe != 0x06 avrdude: verification error; content mismatch avrdude done. Thank you.@siod what board are you using? Windows or Mac?
I would suggest update Arduino IDE - you are running an old versionMany people experience similar issues when using a wrong version of IDE:
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login