Ceech Board MOSFET Pin DIGITALWRITE Problem
-
Hi, I'm working with Ceech-Board for a pool sensor. I'm rewriting the code from V1.5 to 2.x. I encountered a problem with DIGITALWRITE which I can't explain.
Only if I set PINMODE unequal to the PIN for DIGITALWRITE, this output works.
void setup() { pinMode(5, OUTPUT); // Setzt den Digitalpin 13 als Outputpin } void loop() { digitalWrite(4, HIGH); // Setzt den Digitalpin 13 auf HIGH = "Ein" delay(1000); // Wartet eine Sekunde digitalWrite(4, LOW); // Setzt den Digitalpin 13 auf LOW = "Aus" delay(1000); // Wartet eine Sekunde }It worked with pin 3, 5 and 13 e.g.
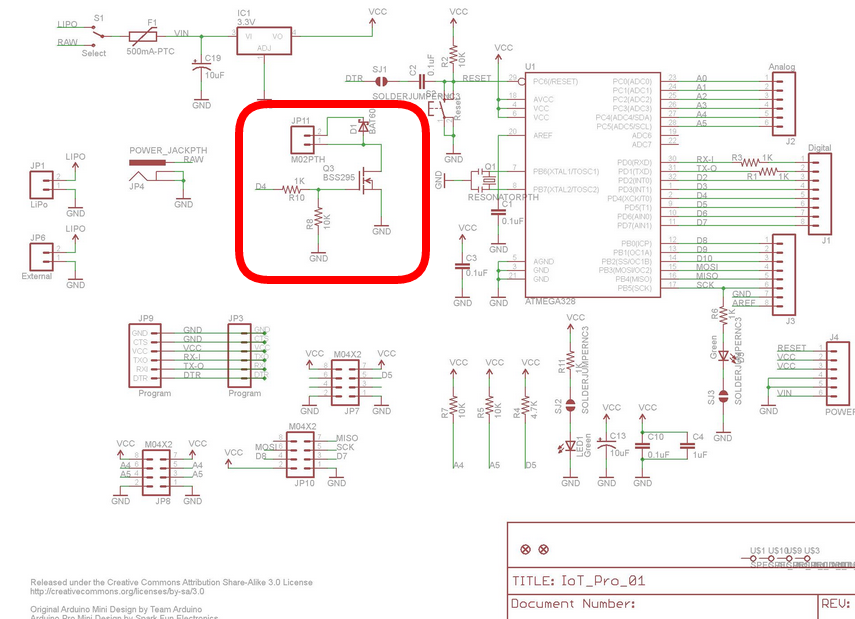
On the board the PIN D4 is followed by a MOSFET for switching. This worked once, once again not. No I seem to have found the problem, but what is the cause?
-
Hi, I'm working with Ceech-Board for a pool sensor. I'm rewriting the code from V1.5 to 2.x. I encountered a problem with DIGITALWRITE which I can't explain.
Only if I set PINMODE unequal to the PIN for DIGITALWRITE, this output works.
void setup() { pinMode(5, OUTPUT); // Setzt den Digitalpin 13 als Outputpin } void loop() { digitalWrite(4, HIGH); // Setzt den Digitalpin 13 auf HIGH = "Ein" delay(1000); // Wartet eine Sekunde digitalWrite(4, LOW); // Setzt den Digitalpin 13 auf LOW = "Aus" delay(1000); // Wartet eine Sekunde }It worked with pin 3, 5 and 13 e.g.
On the board the PIN D4 is followed by a MOSFET for switching. This worked once, once again not. No I seem to have found the problem, but what is the cause?
@paqor I recently converted the sketch to 2.x . Here it goes:
/** * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2015 Sensnology AB * Full contributor list: https://github.com/mysensors/Arduino/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * REVISION HISTORY * Version 1.0 - Initial Version by rvendrame * ****************************** * DESCRIPTION * Floating Swiming pool sensor based on ceech's arista board * (see https://www.tindie.com/products/ceech/astri-arista/ ) * Solar-powered (+Li-ion 18650 battery backup) * PH Measurement via A3 pin, using DFrobot SEN0161 PH sensor * (see https://www.dfrobot.com/wiki/index.php/PH_meter(SKU:_SEN0161) * ORP Measurement via A1 pin, using Phidgets 1130_0 board + 3556_0 Electrode * (see http://www.phidgets.com/products.php?product_id=1130) * (see http://www.phidgets.com/products.php?product_id=3556) * Temp sensor via D4 pin, using DS18B20 sensor * (see https://create.arduino.cc/projecthub/TheGadgetBoy/ds18b20-digital-temperature-sensor-and-arduino-9cc806 ) * * Revisions: * 1.0 ( ??? 2017 ) - Initial version * 1.1 ( Jan 2020 ) - MySensors 2.x port */ // Enable debug prints to serial monitor //#define MY_DEBUG // CEECH BOARD #define CEECH // Define a static node address, AUTO or 1-255 fixed #define MY_NODE_ID AUTO #define MY_PARENT_NODE_ID AUTO // Enable and select radio type attached #define MY_RADIO_RF24 // MY_RADIO_RFM69 // MySensors #define SN "myPoolWater" #define SV "1.2" #ifdef CEECH #define MY_RF24_CE_PIN 7 // Ceech Arista board #define MY_RF24_CS_PIN 8 // Ceech Arista board #endif // Includes ------------------------------------------- #include <MySensors.h> #include <SPI.h> #include <OneWire.h> #include <DallasTemperature.h> // External IO Pins #define PH_PIN A3 // pH Sensor dfrobot SKU SEN0161 #define ORP_PIN A1 // ORP Sensor phidgets ASR2801 (3556_0) + 1103_0 #define ONE_WIRE_BUS 5 // One wire bus // Runtime constants #define day 86400000L // 86400000 milliseconds in a day #define hour 3600000L // 3600000 milliseconds in an hour #define minute 60000L // 60000 milliseconds in a minute #define second 1000L // 1000 milliseconds in a second // Ceech-Arista Internal connections #define current A6 // Charging current from Solar Panel #define cell A2 // Voltage at Solar Panel #define lipo A0 // Voltage at Battery #define CHRG A7 // Charge indicator ( 0 means 'charging' ) #define POWER 4 // MOSFET driver on 5V Step up (to power the sensors) #define R1 47000.0 // resistance of R1 #define R2 10000.0 // resistance of R2 // mySensors objects MyMessage ph_msg( 2, V_PH ), orp_msg( 3, V_ORP ), temp_msg( 1, V_TEMP ), bat_msg( 199 , V_VOLTAGE ), var1_msg( 0 , V_VAR1 ), var2_msg( 0 , V_VAR2 ), var3_msg( 0 , V_VAR3 ); // Setup a oneWire instance to communicate with any OneWire devices // (not just Maxim/Dallas temperature ICs) OneWire oneWire(ONE_WIRE_BUS); // Pass our oneWire reference to Dallas Temperature. DallasTemperature dallas(&oneWire); // Misc #define pHOffset 0.00 // pH deviation compensate #define samplingInterval 20 // in miliseconds #define arrayLenth 40 // times of collection // PH / ORP / Temp Reading static unsigned long samplingTime = millis(); static float temp, ph, orp, voltage; static float aux, dif, old_ph=999, old_orp=999, old_temp=999; int battery, counter = -1, old_bat=999, old_volt=9999; int readings[arrayLenth]; //Store the average value of the sensor feedback int arrayIndex = 0; // Misc float vout = 0.0; float vin = 0.0; int value = 0; //// SETUP void setup() { Serial.begin( MY_BAUD_RATE ); Serial.println(F("Init...")); // IO PINS pinMode( POWER , OUTPUT ); pinMode( PH_PIN , INPUT ); pinMode( ORP_PIN , INPUT ); } //// PRESENTATION void presentation() { sendSketchInfo(SN, SV); present( 1, S_TEMP ); // Temperature present( 2, S_WATER_QUALITY ); // PH present( 3, S_WATER_QUALITY ); // ORP } //// LOOP void loop() { // Force a refresh on each hour... if ( ++counter == 5 ) { old_ph = old_orp = old_temp = -999; old_bat = old_volt = -999; counter = 0; } // Internal board/battery status digitalWrite( POWER , true ); Serial.println("5V Power ON - Wait 5s"); wait(5000); float napetost = readVcc(); Serial.println("*Internal:"); value = analogRead(cell); vout = (value * napetost) / 1024.0; vin = vout / (R2 / (R1 + R2)); if (vin < 0.09) vin = 0.0; float tok = ((analogRead(current) * napetost / 1024 ) * 250) / 3.3; // convert the ADC value to miliamps float baterija = ( analogRead(lipo) * napetost / 1024 ) * 2; // measuring battery voltage int polnjenje = analogRead(CHRG); Serial.print("Vcc = "); Serial.print(napetost); Serial.println("V"); //delay(400); Serial.print("Charge current = "); Serial.print(tok); Serial.println("mA"); //delay(400); Serial.print("Solar cell voltage = "); Serial.print(vin); Serial.println("V"); //delay(400); Serial.print("Battery voltage = "); Serial.print(baterija); Serial.print("V "); aux = constrain( map( baterija*1000 , 2200 , 4000 , 0 , 100 ) , 0 , 100 ); Serial.print( aux , 0 ); Serial.println("%"); dif = aux - old_bat; if ( abs( dif ) > 0 ) { old_bat = aux; send( bat_msg.set(baterija,2) ); sendBatteryLevel( aux) ; send ( var3_msg.set(vin,2) ); } //delay(400); Serial.print("CHRG = "); Serial.println(polnjenje); Serial.println("*External:"); //////// Temp Reading dallas.begin(); // Start up the library dallas.requestTemperatures(); temp = dallas.getTempCByIndex(0); Serial.print( "Temperature: "); Serial.println( temp , 2 ); dif = old_temp - temp; if ( abs( dif ) > 0.01 ) { old_temp = temp; send( temp_msg.set( temp , 2 ) ) ; } //////// PH Reading arrayIndex = 0; while ( arrayIndex < arrayLenth ) if (millis() - samplingTime > samplingInterval) { readings[arrayIndex++] = analogRead(PH_PIN); samplingTime = millis(); } voltage = avergearray( readings, arrayLenth ) * 3.30 / 1024.0; ph = 3.5 * ( voltage + pHOffset ); Serial.print("PH Probe voltage:"); Serial.print(voltage, 4); Serial.print(" pH value: "); Serial.println( ph , 2); dif = old_ph - ph; if ( abs( dif ) > 0.005 ) { old_ph = ph; send( ph_msg.set( ph , 2 ) ) ; send( var1_msg.set( voltage, 4) ); } /////////// ORP arrayIndex = 0; while ( arrayIndex < arrayLenth ) if (millis() - samplingTime > samplingInterval) { readings[arrayIndex++] = analogRead(ORP_PIN); samplingTime = millis(); } voltage = avergearray( readings, arrayLenth ) * 3.31 / 1024.0; orp = ( 2.5 - voltage ) / 1.037 ; Serial.print("ORP Probe voltage:"); Serial.print( voltage, 4); Serial.print(" ORP value: "); Serial.println( orp, 2 ); dif = old_orp - orp; if ( abs( dif ) > 0.005 ) { old_orp = orp; send( orp_msg.set( orp , 2 ) ) ; send( var2_msg.set( voltage, 4) ); } /////////// Sleep digitalWrite( POWER , false ); Serial.println("5V Power OFF"); Serial.print("Runtime: "); time(); Serial.println("Pausing..."); Serial.println("----------------------------"); //delay(715000); wait(500); sleep( 715000U ); // Sleeps for 12m } double avergearray(int* arr, int number) { int i; int max, min; double avg; long amount = 0; if (number <= 0) { Serial.println("Error number for the array to avraging!/n"); return 0; } if (number < 5) { //less than 5, calculated directly statistics for (i = 0; i < number; i++) { amount += arr[i]; } avg = amount / number; return avg; } else { if (arr[0] < arr[1]) { min = arr[0]; max = arr[1]; } else { min = arr[1]; max = arr[0]; } for (i = 2; i < number; i++) { if (arr[i] < min) { amount += min; //arr<min min = arr[i]; } else { if (arr[i] > max) { amount += max; //arr>max max = arr[i]; } else { amount += arr[i]; //min<=arr<=max } }//if }//for avg = (double)amount / (number - 2); }//if return avg; } void time() { long timeNow = millis(); int days = timeNow / day ; //number of days int hours = (timeNow % day) / hour; //the remainder from days division (in milliseconds) divided by hours, this gives the full hours int minutes = ((timeNow % day) % hour) / minute ; //and so on... int seconds = (((timeNow % day) % hour) % minute) / second; // digital clock display of current time Serial.print(days, DEC); printDigits(hours); printDigits(minutes); printDigits(seconds); Serial.println(); } void printDigits(byte digits) { // utility function for digital clock display: prints colon and leading 0 Serial.print(":"); if (digits < 10) Serial.print('0'); Serial.print(digits, DEC); } /* Read internal Vcc reference * */ float readVcc() { signed long resultVcc; float resultVccFloat; // Read 1.1V reference against AVcc ADMUX = _BV(REFS0) | _BV(MUX3) | _BV(MUX2) | _BV(MUX1); delay(10); // Wait for Vref to settle ADCSRA |= _BV(ADSC); // Convert while (bit_is_set(ADCSRA, ADSC)); resultVcc = ADCL; resultVcc |= ADCH << 8; resultVcc = 1126400L / resultVcc; // Back-calculate AVcc in mV resultVccFloat = (float) resultVcc / 1000.0; // Convert to Float return resultVccFloat; } -
Oh, thank you so much. I had to make some small changes though. Maybe it's the newer Ceech Board version.
// IO PINS pinMode( 13 , OUTPUT ); //unclear why this is so ... present(0, S_MULTIMETER); present(0, S_CUSTOM); ... digitalWrite( POWER , HIGH ); ... digitalWrite( POWER , LOW ); -
Hi, I'm working with Ceech-Board for a pool sensor. I'm rewriting the code from V1.5 to 2.x. I encountered a problem with DIGITALWRITE which I can't explain.
Only if I set PINMODE unequal to the PIN for DIGITALWRITE, this output works.
void setup() { pinMode(5, OUTPUT); // Setzt den Digitalpin 13 als Outputpin } void loop() { digitalWrite(4, HIGH); // Setzt den Digitalpin 13 auf HIGH = "Ein" delay(1000); // Wartet eine Sekunde digitalWrite(4, LOW); // Setzt den Digitalpin 13 auf LOW = "Aus" delay(1000); // Wartet eine Sekunde }It worked with pin 3, 5 and 13 e.g.
On the board the PIN D4 is followed by a MOSFET for switching. This worked once, once again not. No I seem to have found the problem, but what is the cause?
@paqor said in Ceech Board MOSFET Pin DIGITALWRITE Problem:
You have to set pinMode for the same pin as you want to use as a output.. That is, if you use
pinMode(5, OUTPUT);you also need to usedigitalWrite(5, HIGH);See documentation hereIf you do not set pinMode for a particular pin, then that pin will be set as input by default. And then digitalWrite() will enable / disable the internal pullup on that particular pin.
I also suggest that you use a #define to make sensible names for your pins, that will make your code more readable:
#define RELAY_PIN 5 void setup() { pinMode(RELAY_PIN, OUTPUT); // Setzt den Digitalpin 13 als Outputpin } void loop() { digitalWrite(RELAY_PIN, HIGH); // Setzt den Digitalpin 13 auf HIGH = "Ein" delay(1000); // Wartet eine Sekunde digitalWrite(RELAY_PIN, LOW); // Setzt den Digitalpin 13 auf LOW = "Aus" delay(1000); // Wartet eine Sekunde }