New nrf24l01+ smd
-
@Sweebee Very nice indeed!
I'm very surprised btw that you're using 2xAA to power the PIR. Will it work reliably (no false detections), even when the batteries are running out?
I use 2xAA to power Pro Mini + nRF and an extra AA to power the PIR. This way the supply to the PIR will stay > 3V over time.http://yveaux.blogspot.nl
-
@Sweebee Very nice indeed!
I'm very surprised btw that you're using 2xAA to power the PIR. Will it work reliably (no false detections), even when the batteries are running out?
I use 2xAA to power Pro Mini + nRF and an extra AA to power the PIR. This way the supply to the PIR will stay > 3V over time.@Yveaux the pirs work fine if you only have interrupts with CHANGE. I don't use a sleep timer. If you wake it up every minute or so its unreliable yes. but only with interrupts from the pir it works fine. I have 10 pirs like this. Oldest one is from march 2015 and still running.
-
@Yveaux the pirs work fine if you only have interrupts with CHANGE. I don't use a sleep timer. If you wake it up every minute or so its unreliable yes. but only with interrupts from the pir it works fine. I have 10 pirs like this. Oldest one is from march 2015 and still running.
-
@Yveaux the pirs work fine if you only have interrupts with CHANGE. I don't use a sleep timer. If you wake it up every minute or so its unreliable yes. but only with interrupts from the pir it works fine. I have 10 pirs like this. Oldest one is from march 2015 and still running.
You have an excellent setup - I ordered those adapter as well at oshpark.
@Yveaux has got a point - I have been struggle to build a reliable PIR on 2xAA batteries. I have just started building it now. 1 year battery life and counting is impressive.@Sweebee Would you care to share your code? Maybe there is anything there which gives us some clues though I believe this is more a hardware issue.
-
You have an excellent setup - I ordered those adapter as well at oshpark.
@Yveaux has got a point - I have been struggle to build a reliable PIR on 2xAA batteries. I have just started building it now. 1 year battery life and counting is impressive.@Sweebee Would you care to share your code? Maybe there is anything there which gives us some clues though I believe this is more a hardware issue.
@alexsh1 said:
Would you care to share your code? Maybe there is anything there which gives us some clues though I believe this is more a hardware issue.
Agree. Apparently @Sweebee made modifications to the PIR (mainly to move some capacitors, judging from the photos) but maybe you did some more to improve battery life/stability?
-
I removed the left capacitor since it's not needed in 3.3v hack. And I moved the right one because otherwise it didn't fit into the case.
My sketch:
#include <MySensor.h> #include <SPI.h> #include <readVcc.h> // ********** CONFIG ********************************** #define NODE_ID AUTO // ID of node #define CHILD_ID 1 // ID of sensor #define PIR_PIN 3 // Pin connected to the PIR #define MIN_V 2000 // empty voltage (0%) #define MAX_V 3200 // full voltage (100%) // **************************************************** MyMessage msg(CHILD_ID, V_TRIPPED); MySensor node; int oldBatteryPcnt; int sentValue; int forceSend = 0; void setup() { node.begin(NULL, NODE_ID, false); node.sendSketchInfo("PIR Sensor", "1.2"); node.present(CHILD_ID, S_MOTION); pinMode(PIR_PIN, INPUT); digitalWrite(PIR_PIN, HIGH); } void loop() { // Get PIR int value = digitalRead(PIR_PIN); // Get value of PIR if (value != sentValue) { // If status of PIR has changed resend(msg.set(value), 5); // Send PIR status to gateway sentValue = value; } // Send batterylevel sendBattery(); // Sleep until something happens with the sensor node.sleep(PIR_PIN-2, CHANGE); } // FUNCTIONS void sendBattery() // Send battery percentage to GW { forceSend++; int batteryPcnt = min(map(readVcc(), MIN_V, MAX_V, 0, 100), 100); // Get VCC and convert to percentage if (batteryPcnt != oldBatteryPcnt || forceSend >= 20) { // If battery percentage has changed node.sendBatteryLevel(batteryPcnt); // Send battery percentage to gateway oldBatteryPcnt = batteryPcnt; forceSend = 0; } } void resend(MyMessage &msg, int repeats) // Resend messages if not received by GW { int repeat = 0; int repeatDelay = 0; boolean ack = false; while ((ack == false) and (repeat < repeats)) { if (node.send(msg)) { ack = true; } else { ack = false; repeatDelay += 100; } repeat++; delay(repeatDelay); } } -
I removed the left capacitor since it's not needed in 3.3v hack. And I moved the right one because otherwise it didn't fit into the case.
My sketch:
#include <MySensor.h> #include <SPI.h> #include <readVcc.h> // ********** CONFIG ********************************** #define NODE_ID AUTO // ID of node #define CHILD_ID 1 // ID of sensor #define PIR_PIN 3 // Pin connected to the PIR #define MIN_V 2000 // empty voltage (0%) #define MAX_V 3200 // full voltage (100%) // **************************************************** MyMessage msg(CHILD_ID, V_TRIPPED); MySensor node; int oldBatteryPcnt; int sentValue; int forceSend = 0; void setup() { node.begin(NULL, NODE_ID, false); node.sendSketchInfo("PIR Sensor", "1.2"); node.present(CHILD_ID, S_MOTION); pinMode(PIR_PIN, INPUT); digitalWrite(PIR_PIN, HIGH); } void loop() { // Get PIR int value = digitalRead(PIR_PIN); // Get value of PIR if (value != sentValue) { // If status of PIR has changed resend(msg.set(value), 5); // Send PIR status to gateway sentValue = value; } // Send batterylevel sendBattery(); // Sleep until something happens with the sensor node.sleep(PIR_PIN-2, CHANGE); } // FUNCTIONS void sendBattery() // Send battery percentage to GW { forceSend++; int batteryPcnt = min(map(readVcc(), MIN_V, MAX_V, 0, 100), 100); // Get VCC and convert to percentage if (batteryPcnt != oldBatteryPcnt || forceSend >= 20) { // If battery percentage has changed node.sendBatteryLevel(batteryPcnt); // Send battery percentage to gateway oldBatteryPcnt = batteryPcnt; forceSend = 0; } } void resend(MyMessage &msg, int repeats) // Resend messages if not received by GW { int repeat = 0; int repeatDelay = 0; boolean ack = false; while ((ack == false) and (repeat < repeats)) { if (node.send(msg)) { ack = true; } else { ack = false; repeatDelay += 100; } repeat++; delay(repeatDelay); } }@Sweebee Only real difference I see compared to my sketch is that I'm using a timeout when sleeping, so the watchdog stays enabled while sleeping.
According to the datasheet, the AtMega power consumption is roughly 4.7uA vs 0.6uA in powerdown mode with/without watchdog enabled: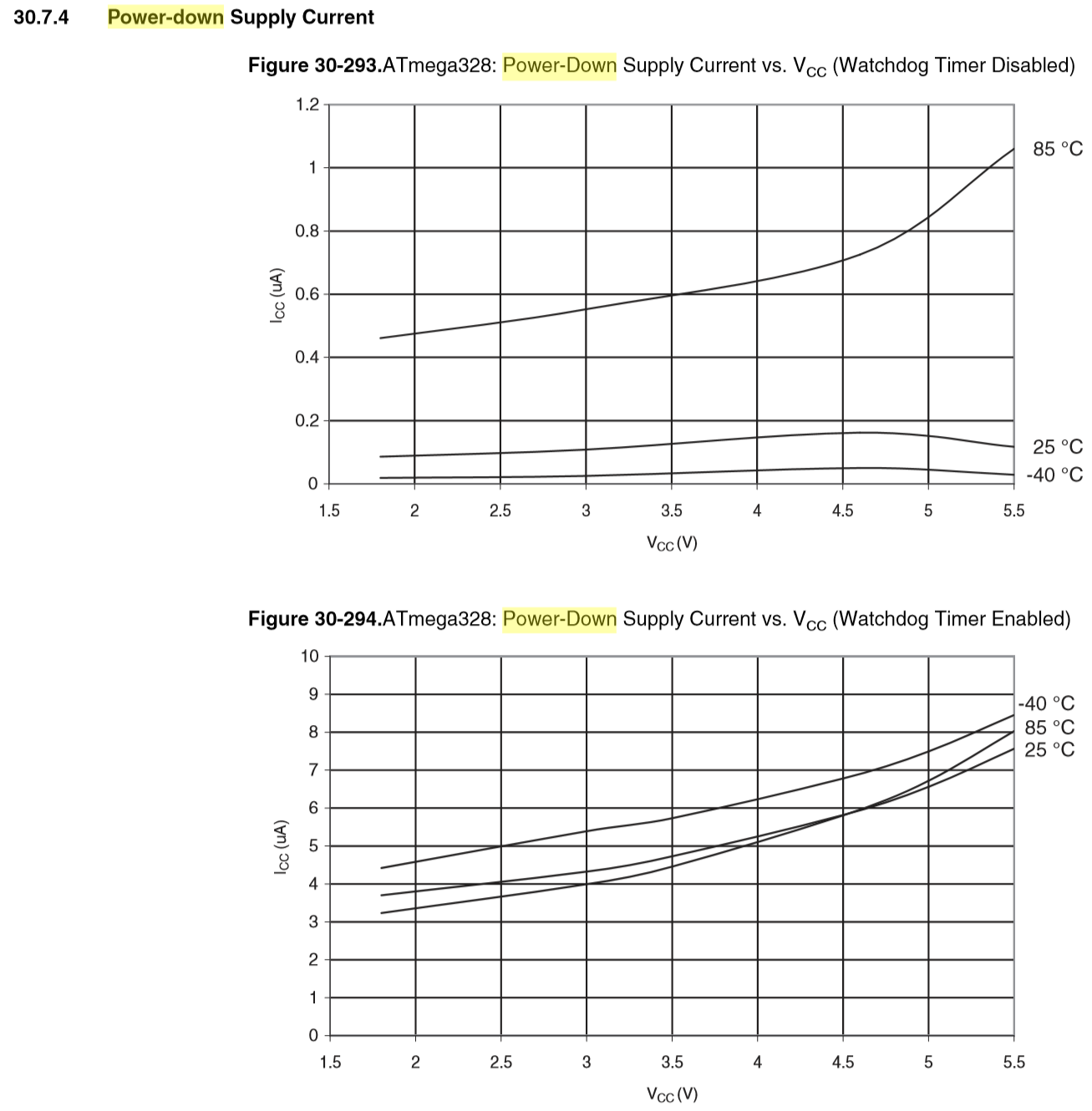
This is a significant difference, but when including the PIR & nRF in the total power consumption it is only a small part.
-
I removed the left capacitor since it's not needed in 3.3v hack. And I moved the right one because otherwise it didn't fit into the case.
My sketch:
#include <MySensor.h> #include <SPI.h> #include <readVcc.h> // ********** CONFIG ********************************** #define NODE_ID AUTO // ID of node #define CHILD_ID 1 // ID of sensor #define PIR_PIN 3 // Pin connected to the PIR #define MIN_V 2000 // empty voltage (0%) #define MAX_V 3200 // full voltage (100%) // **************************************************** MyMessage msg(CHILD_ID, V_TRIPPED); MySensor node; int oldBatteryPcnt; int sentValue; int forceSend = 0; void setup() { node.begin(NULL, NODE_ID, false); node.sendSketchInfo("PIR Sensor", "1.2"); node.present(CHILD_ID, S_MOTION); pinMode(PIR_PIN, INPUT); digitalWrite(PIR_PIN, HIGH); } void loop() { // Get PIR int value = digitalRead(PIR_PIN); // Get value of PIR if (value != sentValue) { // If status of PIR has changed resend(msg.set(value), 5); // Send PIR status to gateway sentValue = value; } // Send batterylevel sendBattery(); // Sleep until something happens with the sensor node.sleep(PIR_PIN-2, CHANGE); } // FUNCTIONS void sendBattery() // Send battery percentage to GW { forceSend++; int batteryPcnt = min(map(readVcc(), MIN_V, MAX_V, 0, 100), 100); // Get VCC and convert to percentage if (batteryPcnt != oldBatteryPcnt || forceSend >= 20) { // If battery percentage has changed node.sendBatteryLevel(batteryPcnt); // Send battery percentage to gateway oldBatteryPcnt = batteryPcnt; forceSend = 0; } } void resend(MyMessage &msg, int repeats) // Resend messages if not received by GW { int repeat = 0; int repeatDelay = 0; boolean ack = false; while ((ack == false) and (repeat < repeats)) { if (node.send(msg)) { ack = true; } else { ack = false; repeatDelay += 100; } repeat++; delay(repeatDelay); } } -
@Sweebee I see in the sketch, that you are enabling internal pull-up on PIR input. This means, that if PIR is not detecting movement and its output is set to zero, this pull-up resistor consumes 60uA (in the best case).
@Maciej-Kulawik in my calculations it is 6uA. The pirs use around 15-20 uA in sleep.
-
@Maciej-Kulawik in my calculations it is 6uA. The pirs use around 15-20 uA in sleep.
-
@Sweebee Depending on value of these pull-up resistors. I have read that they have about 50k, so with vcc=3v you will get 60u.
@Maciej-Kulawik removed the pull-up and they are all working fine :) Don't know why i have added it, in one of my oldest sketches i havent enabled it.



