💬 Building a Raspberry Pi Gateway
-
-
For me, my electronics is not as good as my development skills ;-). But I gave it a try. According to the datasheet the NRF24 will consume about 14 mA max. My cable is 2 m max, so then the resistance is 0,16ohms. So if I understand correctly the voltage drop would be 0,00224 volt. Sounds neglegtable to me? Also; can't I just measure the voltage at the end of the cable once it's connected to the RPI?
-
At the stackoverflow page somebody says: "In an answer on a Microchip forum, Jan Axelson, author of 'Serial Port Complete', claims a maximum cable length of 10' for the SPI bus. Other posts have mentioned the same figure.". So 10" is about 3 metres, so I am within that range. I do understand though that this isn't a preferred thing to do.
Which makes me wonder how other people handle this. I mean; I think ideally you'd want the radio that is connected to the controller in the most 'center' way of the home, right? So do people just hange the Pi and the whole shebang to the ceiling? ;-) I'd rather put the controller in the closet where my modem and router are, and then only wire the receiver to outside the closet. Isn't there a better way to do this?
-
-
-
For me, my electronics is not as good as my development skills ;-). But I gave it a try. According to the datasheet the NRF24 will consume about 14 mA max. My cable is 2 m max, so then the resistance is 0,16ohms. So if I understand correctly the voltage drop would be 0,00224 volt. Sounds neglegtable to me? Also; can't I just measure the voltage at the end of the cable once it's connected to the RPI?
-
At the stackoverflow page somebody says: "In an answer on a Microchip forum, Jan Axelson, author of 'Serial Port Complete', claims a maximum cable length of 10' for the SPI bus. Other posts have mentioned the same figure.". So 10" is about 3 metres, so I am within that range. I do understand though that this isn't a preferred thing to do.
Which makes me wonder how other people handle this. I mean; I think ideally you'd want the radio that is connected to the controller in the most 'center' way of the home, right? So do people just hange the Pi and the whole shebang to the ceiling? ;-) I'd rather put the controller in the closet where my modem and router are, and then only wire the receiver to outside the closet. Isn't there a better way to do this?
Nice work @rolandow
You can measure the voltage drop, if you put a load of 14mA on the cable. But without load, there will be no voltage drop.One small adjustment on your calculation: there will be 4m cable (2m to the radio and 2m back). But the drop will still be negligable for a normal nrf24.
-
-
Please edit the image used in this tutorial:
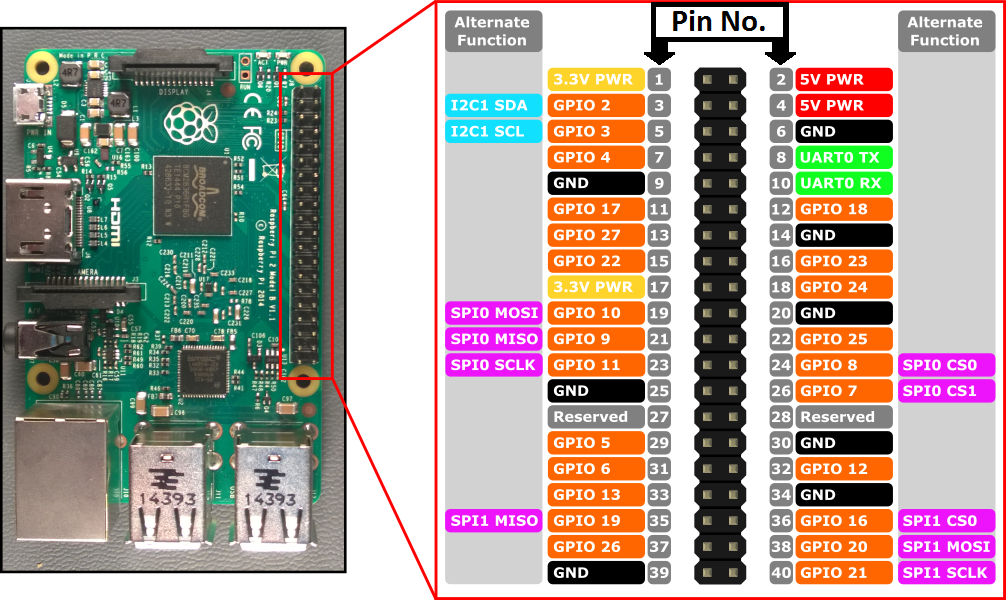
It is wrong and misleading, as it says that pin36 is SPI1 CS0. In fact SPI1 CS0 by default is pin12. To be able to use pin36 as SPI1 CS0 one have to follow implicit steps which can be found on this forum thread: https://www.raspberrypi.org/forums/viewtopic.php?t=203776.
Also it would be useful to add instructions to enable SPI1 in /boot/config.txt to the tutorial. -
I want to run this gateway with another networkid (RFM69) but can't find how to do this. The option --my-rfm69-networkid=105 in the config line is ignored. So maybe it should go in the mysensnsors.conf file, but what is the syntax of this option?
Thanks. -
I want to run this gateway with another networkid (RFM69) but can't find how to do this. The option --my-rfm69-networkid=105 in the config line is ignored. So maybe it should go in the mysensnsors.conf file, but what is the syntax of this option?
Thanks.@rolo6442u where did you find
my-rfm69-networkid? I don't think such an option has ever existed. If you found it somewhere we probably need to update that documentation.Follow the instructions at https://www.mysensors.org/build/raspberry#advanced to set defines.
-
@rolo6442u where did you find
my-rfm69-networkid? I don't think such an option has ever existed. If you found it somewhere we probably need to update that documentation.Follow the instructions at https://www.mysensors.org/build/raspberry#advanced to set defines.
-
@mfalkvidd
I did not found it, I kind of made it up, following the syntax of other options.
Looks like there is no way of changing the ID at this moment for the PI gateway. -
@rolo6442u ok. Well, making things up will usually not add them to the code ;-)
There is a way. Two actually. Set the define in one of the two ways described on the link I provided.
@mfalkvidd
Thanks, will take a look at that. -
Might be nice to know it compilation still seems to works fine on Raspbian Buster on a Raspberry Pi 4.
// Update: unlike on the Pi 3 I now had to activate SPI. Might be good to make that more prominent in the explanation now.
-
Might be nice to know it compilation still seems to works fine on Raspbian Buster on a Raspberry Pi 4.
// Update: unlike on the Pi 3 I now had to activate SPI. Might be good to make that more prominent in the explanation now.
@alowhum to my knowledge, activating SPI has always been required, unless the user has already activated SPI by some other means.
Do you have a suggestion on how to make it more prominent that what it is now? Preferably without contributing too much to the pileup of notices that scare users - everything is super-important to at least 1 person.
-
@alowhum to my knowledge, activating SPI has always been required, unless the user has already activated SPI by some other means.
Do you have a suggestion on how to make it more prominent that what it is now? Preferably without contributing too much to the pileup of notices that scare users - everything is super-important to at least 1 person.
@mfalkvidd I don't know, perhaps mention it as something that has to be done upfront instead of something that might need to be done if there is an error?
I'm not having any luck actually getting the radio to work. I now noticed this warning during compilation:
g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -DMY_RADIO_RF24 -DMY_GATEWAY_LINUX -DMY_GATEWAY_MQTT_CLIENT -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_MQTT_CLIENT_ID=\"mygateway1\" -DMY_MQTT_SUBSCRIBE_TOPIC_PREFIX=\"mysensors-in\" -DMY_MQTT_PUBLISH_TOPIC_PREFIX=\"mysensors-out\" -DMY_CONTROLLER_IP_ADDRESS=127,0,0,1 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o drivers/Linux/GPIO.cpp: In constructor ‘GPIOClass::GPIOClass()’: drivers/Linux/GPIO.cpp:53:18: warning: ‘%s’ directive writing up to 255 bytes into a region of size 48 [-Wformat-overflow=] sprintf(file, "/sys/class/gpio/%s/base", de->d_name); ^~~~~~~~~~~~~~~~~~~~~~~~~ drivers/Linux/GPIO.cpp:53:11: note: ‘sprintf’ output between 22 and 277 bytes into a destination of size 64 sprintf(file, "/sys/class/gpio/%s/base", de->d_name); ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ drivers/Linux/GPIO.cpp:62:18: warning: ‘%s’ directive writing up to 255 bytes into a region of size 48 [-Wformat-overflow=] sprintf(file, "/sys/class/gpio/%s/ngpio", de->d_name); ^~~~~~~~~~~~~~~~~~~~~~~~~~ drivers/Linux/GPIO.cpp:62:11: note: ‘sprintf’ output between 23 and 278 bytes into a destination of size 64 sprintf(file, "/sys/class/gpio/%s/ngpio", de->d_name); ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ -
Could this be an issue?
./configure without any additional parameters gives:
[SECTION] Detecting target machine. [OK] machine detected: SoC=unknown, Type=unknown, CPU=armv7l.The rest looks fine:
[SECTION] Checking GPIO Sysfs. [OK] /sys/class/gpio/export found. [SECTION] Detecting SPI driver. [OK] SPI driver detected:SPIDEV. [SECTION] Gateway configuration. [OK] Type: ethernet. [OK] Transport: rf24. [OK] Signing: Disabled. [OK] Encryption: Disabled. [OK] CPPFLAGS: -DMY_RADIO_RF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV [SECTION] Detecting init system. [OK] Init system detected: systemd. [SECTION] Saving configuration. [OK] Saved. [SECTION] Cleaning previous builds. [OK] Finished.Same thing happens with the dev version
-
Hi All
I'm just venturing into this world of building my own sensors - but perhaps i am a tad late? Two months since last update.. Typically me - showing up to the party when everybody else has left.
My main issue is, i am running the Raspberry Pi 4 - and when trying to build (i've tried both the development and master builds) i get from 4 (master build) to A BUNCH (development) of errors. First of all, the autodetect of SoC does not work for me either (just like @alowhum, and with the same warnings), and when using --help the actual SoC is not listed either, so should i just assume it does not work for Raspberry Pi 4?
Is there any chance the 4 will be supported soon?
Just a note - i can actually complete the configure and then make - but unfortunately i just get a TSP error when trying to fire up the radio.
Hope i can get this working as it was the main reason for upgrading my RaspberryPi version 1 to a version 4 :man-facepalming:
Thanks in advance for any and all help!
-
Hi All
I'm just venturing into this world of building my own sensors - but perhaps i am a tad late? Two months since last update.. Typically me - showing up to the party when everybody else has left.
My main issue is, i am running the Raspberry Pi 4 - and when trying to build (i've tried both the development and master builds) i get from 4 (master build) to A BUNCH (development) of errors. First of all, the autodetect of SoC does not work for me either (just like @alowhum, and with the same warnings), and when using --help the actual SoC is not listed either, so should i just assume it does not work for Raspberry Pi 4?
Is there any chance the 4 will be supported soon?
Just a note - i can actually complete the configure and then make - but unfortunately i just get a TSP error when trying to fire up the radio.
Hope i can get this working as it was the main reason for upgrading my RaspberryPi version 1 to a version 4 :man-facepalming:
Thanks in advance for any and all help!
Thanks for sharing your experience @swedchef
From the problems reported by users (you included), it seems like the rpi4 is quite different fom the earlier rpis. To add support, the following ingredients are needed in one person
- person needs to have sufficient knowledge and skills to figure out how to support the rpi4
- person needs to have sufficient time to do the work
- person needs to have a rpi4
- person needs to be sufficiently interested/motivated to do the work
It seems like, so far, we haven't found this person (or this person hasn't found us).
-
Thanks for sharing your experience @swedchef
From the problems reported by users (you included), it seems like the rpi4 is quite different fom the earlier rpis. To add support, the following ingredients are needed in one person
- person needs to have sufficient knowledge and skills to figure out how to support the rpi4
- person needs to have sufficient time to do the work
- person needs to have a rpi4
- person needs to be sufficiently interested/motivated to do the work
It seems like, so far, we haven't found this person (or this person hasn't found us).
Re: 💬 Building a Raspberry Pi Gateway
Hi all,
i compile with success the gateway in Raspberry PI 4 (with some code modification)
this is not perfect.. but it works.
if someone wants to try, i upload the gateway compiled with this options :
--my-transport=rf24 --my-gateway=ethernet --my-port=5003 -
Re: 💬 Building a Raspberry Pi Gateway
Hi all,
i compile with success the gateway in Raspberry PI 4 (with some code modification)
this is not perfect.. but it works.
if someone wants to try, i upload the gateway compiled with this options :
--my-transport=rf24 --my-gateway=ethernet --my-port=5003@phildefer could you please share what you changed? The security concerned might not be comfortable running a binary with unspecified changes that manages their home automation setup. Especially not a project supposed to be open source.
-
Re: 💬 Building a Raspberry Pi Gateway
Hi all,
i compile with success the gateway in Raspberry PI 4 (with some code modification)
this is not perfect.. but it works.
if someone wants to try, i upload the gateway compiled with this options :
--my-transport=rf24 --my-gateway=ethernet --my-port=5003 -
@phildefer would you mind sharing the code modifications that were needed?
@mfalkvidd @Anticimex : yes i sharing the code perhaps this week end. I need to find time to make a PR to GITHUB
As I said, my code may not be as clean as you'd like, but it works.