MySensors weather station




-
@dbemowsk
I am using 8 digital inputs, with pinmode(x,INPUT_PULLUP) on all of them, A0, A1 and A2 i use as digital input because I am using UNO so all the digitals was occupied with NRf and Rain, Wind speed.@flopp I just didn't want to use up all the IO lines if I didn't have to. The designs that I was showing with the resistors allows you to detect multiple switch triggers with 1 or 2 I/O lines depending how you want that detection done. I want to add a few other sensors to the setup, so I want to keep as many IO lines free as I can.
-
Just got my phototransistors. The ebay auction said that it was for 10 sensors. I got 15..... BONUS. :^)
-
OK, so I am doing some testing on the new wind direction sensor board I am building. My problem is that the infrared LED that I have, which was scavanged from an old remote, has good IR pointing forward. but when I try to direct it sideways to the IR sensors, I appear to not be getting enough IR light to trigger the sensors. If I shine a flashlight at each of the sensors, they register, but not when O Does anyone know of either a different IR diode, or a way that I can get the existing diode to shine more in a sideways direction? Here is what the board is looking like. I currently only have one set of 4 sensors connected for testing. You can kind of see that the IR LED is lit.
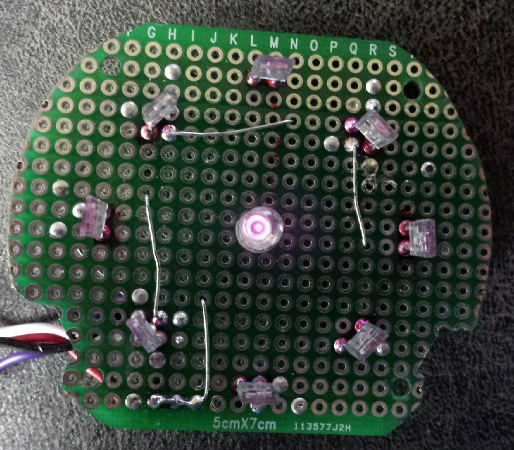
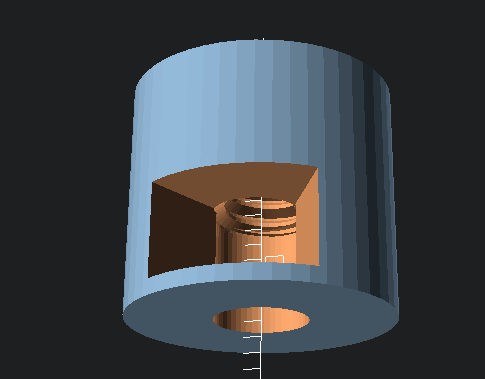
This is the design of the IR rotor that directs the light which gets screwed to the end of the bolt that is the shaft of the wind direction vane. The majority of the IR light gets directed at the end of the bolt.
 .
.I am up for any suggestions.
Vera Plus running UI7 with MySensors, Sonoffs and 1-Wire devices
Visit my website for more Bits, Bytes and Ramblings from me: http://dan.bemowski.info/ -
Just got my phototransistors. The ebay auction said that it was for 10 sensors. I got 15..... BONUS. :^)
-
OK, so I am doing some testing on the new wind direction sensor board I am building. My problem is that the infrared LED that I have, which was scavanged from an old remote, has good IR pointing forward. but when I try to direct it sideways to the IR sensors, I appear to not be getting enough IR light to trigger the sensors. If I shine a flashlight at each of the sensors, they register, but not when O Does anyone know of either a different IR diode, or a way that I can get the existing diode to shine more in a sideways direction? Here is what the board is looking like. I currently only have one set of 4 sensors connected for testing. You can kind of see that the IR LED is lit.
This is the design of the IR rotor that directs the light which gets screwed to the end of the bolt that is the shaft of the wind direction vane. The majority of the IR light gets directed at the end of the bolt.
.I am up for any suggestions.
@dbemowsk i have an led flashlight in the shape of a lantern, it has a shape like cone that has been dehydrated, so there is a concave curve from the base to the tip. Sort of like a golf tee but different proportions.

I guess it it like a regular flashlight reflector inside out
-
@dbemowsk 15 is metric for 10.*
- If you received 16, then I could have said you ordered in hex, and this would actually have been funny.
@wallyllama That would have been funny. There are 10 types of people in this world, Those that understand binary, and those that don't.
-
@dbemowsk i have an led flashlight in the shape of a lantern, it has a shape like cone that has been dehydrated, so there is a concave curve from the base to the tip. Sort of like a golf tee but different proportions.
I guess it it like a regular flashlight reflector inside out
@wallyllama My only problem with this is that the hole that the LED fits in is slightly larger than 5mm, so that cone would need to be tiny.
-
OK, so I am doing some testing on the new wind direction sensor board I am building. My problem is that the infrared LED that I have, which was scavanged from an old remote, has good IR pointing forward. but when I try to direct it sideways to the IR sensors, I appear to not be getting enough IR light to trigger the sensors. If I shine a flashlight at each of the sensors, they register, but not when O Does anyone know of either a different IR diode, or a way that I can get the existing diode to shine more in a sideways direction? Here is what the board is looking like. I currently only have one set of 4 sensors connected for testing. You can kind of see that the IR LED is lit.
This is the design of the IR rotor that directs the light which gets screwed to the end of the bolt that is the shaft of the wind direction vane. The majority of the IR light gets directed at the end of the bolt.
.I am up for any suggestions.
@dbemowsk actually, you only have to illuminate the sensors that your slot faces, a 45° mirror or a reflector opposite the slot should help.
-
Maybe a steel sphere? A white piece of plastic? Remember that you can use the smartphone camera to see the ir light coming from the led, in case you would like to see the result before assembling it
-
Hello all,
I'd like to add to this discussion my bit,
here is code from my older project of arduino based, battery operated, solar panel charged weather station
https://github.com/Luc3as/MySensors-WeatherStation
I must finish all documentation, I have PCBs ready and manufactured and tested, and models ready for 3d prints too.
I am not measuring wind so I am also interested in nice work above.
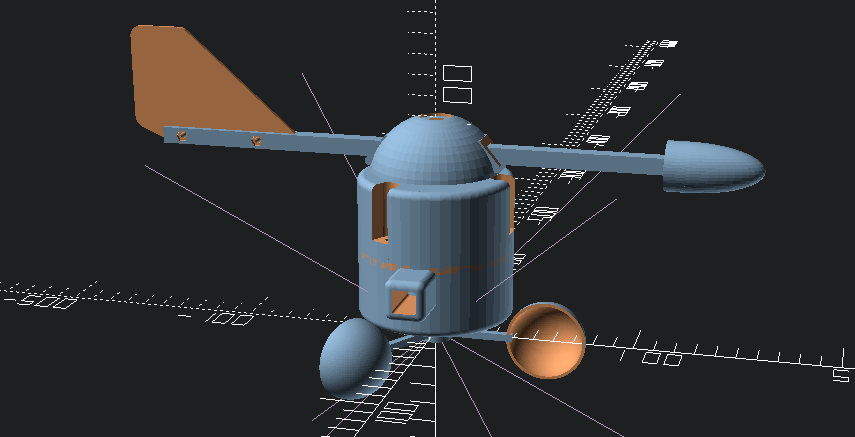
for now it is still work in progress, here is little teaser of overall look

-
Hello all,
I'd like to add to this discussion my bit,
here is code from my older project of arduino based, battery operated, solar panel charged weather station
https://github.com/Luc3as/MySensors-WeatherStation
I must finish all documentation, I have PCBs ready and manufactured and tested, and models ready for 3d prints too.
I am not measuring wind so I am also interested in nice work above.
for now it is still work in progress, here is little teaser of overall look
@Luc3as Thanks for the contribution. I have been quite busy the past few weeks and haven't had a lot of time to work more on the wind direction sensor. There are still a few issues I am working through with that before I can start jumping into the code for it. I am hoping to get more done this weekend.
As for your 3D files, do you have them on thingiverse or somewhere accessible for us to check them out? I am interested in the work you have done.
-
@gohan I can't see those small panels delivering that much. Plus, at certain parts of the day a number of the panels will most likely be shaded lowering their output.
Vera Plus running UI7 with MySensors, Sonoffs and 1-Wire devices
Visit my website for more Bits, Bytes and Ramblings from me: http://dan.bemowski.info/ -
@gohan I can't see those small panels delivering that much. Plus, at certain parts of the day a number of the panels will most likely be shaded lowering their output.
@dbemowsk yup, actually there are 8 of them, each providing nominal 0,5 volts, so to power up the lipo charger for battery I need at least 4 volts, in direct sunlight I think this will not be problem, but as @dbemowsk says, it will not have ideal position to sun every day and for whole time. but there is big enough reserve at battery , providing power for few days to weeks even without solar panel.
and I am also checking voltage on solar panel so if there would be some problem with charging I can set notifications or something from home automation system. -
I did some wind speed and direction sensor boards that I use in my own weather station design. All solid state and high resolution with analog signal readout, voltage for direction, 8 pulse per rev for speed. For inspiration see http://wws.us.to. Gary
-
@dbemowsk yup, actually there are 8 of them, each providing nominal 0,5 volts, so to power up the lipo charger for battery I need at least 4 volts, in direct sunlight I think this will not be problem, but as @dbemowsk says, it will not have ideal position to sun every day and for whole time. but there is big enough reserve at battery , providing power for few days to weeks even without solar panel.
and I am also checking voltage on solar panel so if there would be some problem with charging I can set notifications or something from home automation system. -
@Luc3as if you put solar panels in series you will get resistance from the shaded ones (at least that is what I saw in some experiments) . It would be better to have a single one pointing south that gathers the most sunlight and that's it
@gohan said in MySensors weather station:
@Luc3as if you put solar panels in series you will get resistance from the shaded ones
That is correct, as far as what I have learned. Large monocrystaline and polycrystaline solar panels like the ones shown below have low to no output for the entire panel when one or more of the cells on a panel is shaded or covered.

Amorphous solar panels like these have closer to full output with less drop-off in shaded areas, but have a lower overall amperage output than monocrystaline and polycrystaline panels.

The cells that @Luc3as has in his pic appear to be monocrystaline cells. Each cell will produce about 0.5 volts, so depending on the batteries you are using and the charging circuit, you could put some of these in series to create a couple banks, and then put the banks in parallel, you may get some usable power to charge a battery.