Sleep/Wake/TXRx Cycle
-
Okay, here is the code...
#include <Sleep_n0m1.h> #include <SPI.h> #include <EEPROM.h> #include <DallasTemperature.h> #include <OneWire.h> #include <RF24.h> #include <Sensor.h> #define ONE_WIRE_BUS 3 // Pin where dallase sensor is connected #define MAX_ATTACHED_DS18B20 16 unsigned long SLEEP_TIME = 3; // Sleep time between reads (in seconds) OneWire oneWire(ONE_WIRE_BUS); DallasTemperature sensors(&oneWire); Sensor gw; Sleep sleep; float lastTemperature[MAX_ATTACHED_DS18B20]; int numSensors=0; boolean metric = false; void setup() { sensors.begin(); gw.begin(); // Send the sketch version information to the gateway and Controller //gw.sendSketchInfo("Temperature Sensor", "1.0"); // Fetch the number of attached sensors numSensors = sensors.getDeviceCount(); // Register all sensors to gw (they will be created as child devices) //for (int i=0; i<numSensors && i<MAX_ATTACHED_DS18B20; i++) { // gw.sendSensorPresentation(i, S_TEMP); //} // metric = gw.isMetricSystem(); } void loop() { sensors.requestTemperatures(); // Fetch temperatures from Dallas delay(100); for (int i=0; i<numSensors && i<MAX_ATTACHED_DS18B20; i++) { // Fetch and round temperature to one decimal float temperature = static_cast<float>(static_cast<int> ((metric?sensors.getTempCByIndex(i):sensors.getTempFByIndex(i)) * 10.)) / 10.; // Only send data if temperature has changed and no error if (lastTemperature[i] != temperature && temperature != -127.00) { gw.powerUp(); // Powerup introduces a small delay (which is missing in radio.write powerup) // Send variable (using registered shortcut) to gw gw.sendVariable(i, V_TEMP, temperature, 1); //lastTemperature[i]=temperature; lastTemperature[i]=temperature-100;//Force a reading every time; Added by Erik //Serial.println(temperature); //Added by Erik } } // Power down the radio. Note that the radio will get powered back up // on the next write() call. delay(500); gw.powerDown(); sleep.pwrDownMode(); //set sleep mode sleep.sleepDelay(SLEEP_TIME * 1000); //sleep for: sleepTime } -
@therik To show as code - insert a couple of line feeds at the start and then all lines of code thereafter, indent with four spaces.
If you are using ver 1.3 of the Arduino code; then recommend you change to the ver 1.4 of the code. The radio code is far better.
@a-lurker yea, I know everyone likes v1.4. I had some trouble initially, probably related to the voltage ripple on the radio, and I haven't migrated over to v1.4 since discovering the solution to the radio power supply problem. I will try v1.4 again soon; I hope.
-
Okay, here is the code...
#include <Sleep_n0m1.h> #include <SPI.h> #include <EEPROM.h> #include <DallasTemperature.h> #include <OneWire.h> #include <RF24.h> #include <Sensor.h> #define ONE_WIRE_BUS 3 // Pin where dallase sensor is connected #define MAX_ATTACHED_DS18B20 16 unsigned long SLEEP_TIME = 3; // Sleep time between reads (in seconds) OneWire oneWire(ONE_WIRE_BUS); DallasTemperature sensors(&oneWire); Sensor gw; Sleep sleep; float lastTemperature[MAX_ATTACHED_DS18B20]; int numSensors=0; boolean metric = false; void setup() { sensors.begin(); gw.begin(); // Send the sketch version information to the gateway and Controller //gw.sendSketchInfo("Temperature Sensor", "1.0"); // Fetch the number of attached sensors numSensors = sensors.getDeviceCount(); // Register all sensors to gw (they will be created as child devices) //for (int i=0; i<numSensors && i<MAX_ATTACHED_DS18B20; i++) { // gw.sendSensorPresentation(i, S_TEMP); //} // metric = gw.isMetricSystem(); } void loop() { sensors.requestTemperatures(); // Fetch temperatures from Dallas delay(100); for (int i=0; i<numSensors && i<MAX_ATTACHED_DS18B20; i++) { // Fetch and round temperature to one decimal float temperature = static_cast<float>(static_cast<int> ((metric?sensors.getTempCByIndex(i):sensors.getTempFByIndex(i)) * 10.)) / 10.; // Only send data if temperature has changed and no error if (lastTemperature[i] != temperature && temperature != -127.00) { gw.powerUp(); // Powerup introduces a small delay (which is missing in radio.write powerup) // Send variable (using registered shortcut) to gw gw.sendVariable(i, V_TEMP, temperature, 1); //lastTemperature[i]=temperature; lastTemperature[i]=temperature-100;//Force a reading every time; Added by Erik //Serial.println(temperature); //Added by Erik } } // Power down the radio. Note that the radio will get powered back up // on the next write() call. delay(500); gw.powerDown(); sleep.pwrDownMode(); //set sleep mode sleep.sleepDelay(SLEEP_TIME * 1000); //sleep for: sleepTime }@therik said:
gw.powerUp(); // Powerup introduces a small delay (which is missing in radio.write powerup)By quickly scanning over your code I only see powerUp getting called for every sensor. That shouldn't be required. I would take it out of the loop. In 1.4 you don't need to call powerUp at all; the library will do it for you.
If you only have 1 sensor attached that loop is only executed once, btw.
-
Yes I thought this was a rather long time too. Need to post the code in use.
Just on say a single transmission at 250K bps - then (32*8)/250000 = about one ms. That's assuming a 32 byte payload at 8 bits per byte. It would be longer than this, as it may be sent multiple times, if an ACK was not received. Plus the turn around time and the actual ACKing has to be added in as well.
How many variables are being returned?
@a-lurker said:
Just on say a single transmission at 250K bps - then (32*8)/250000 = about one ms.
That's good enough for the topic here, but here's how I calculate when I'm planning.
Add 9 bytes to the payload length for overhead (preamble + 5 byte address + control + 2 byte CRC). Control is really 9 bits, but why quibble? So a full packet @250Kbps is about 4/3 ms.
Turnaround is 130uS. With simple successful ACK in ESB mode, a 32 byte payload would take about 41x32us + 130 us + 9x32us, (plus another 130 us before the next transmit can begin). Call it 1 3/4 ms before you get acknowledgement.
(use 8 us and 4 us multipilers for 1 Mbps and 2 Mbps)
Those are best cases in an ideal world of course, things will be slower in reality.
-
@a-lurker said:
Just on say a single transmission at 250K bps - then (32*8)/250000 = about one ms.
That's good enough for the topic here, but here's how I calculate when I'm planning.
Add 9 bytes to the payload length for overhead (preamble + 5 byte address + control + 2 byte CRC). Control is really 9 bits, but why quibble? So a full packet @250Kbps is about 4/3 ms.
Turnaround is 130uS. With simple successful ACK in ESB mode, a 32 byte payload would take about 41x32us + 130 us + 9x32us, (plus another 130 us before the next transmit can begin). Call it 1 3/4 ms before you get acknowledgement.
(use 8 us and 4 us multipilers for 1 Mbps and 2 Mbps)
Those are best cases in an ideal world of course, things will be slower in reality.
-
-
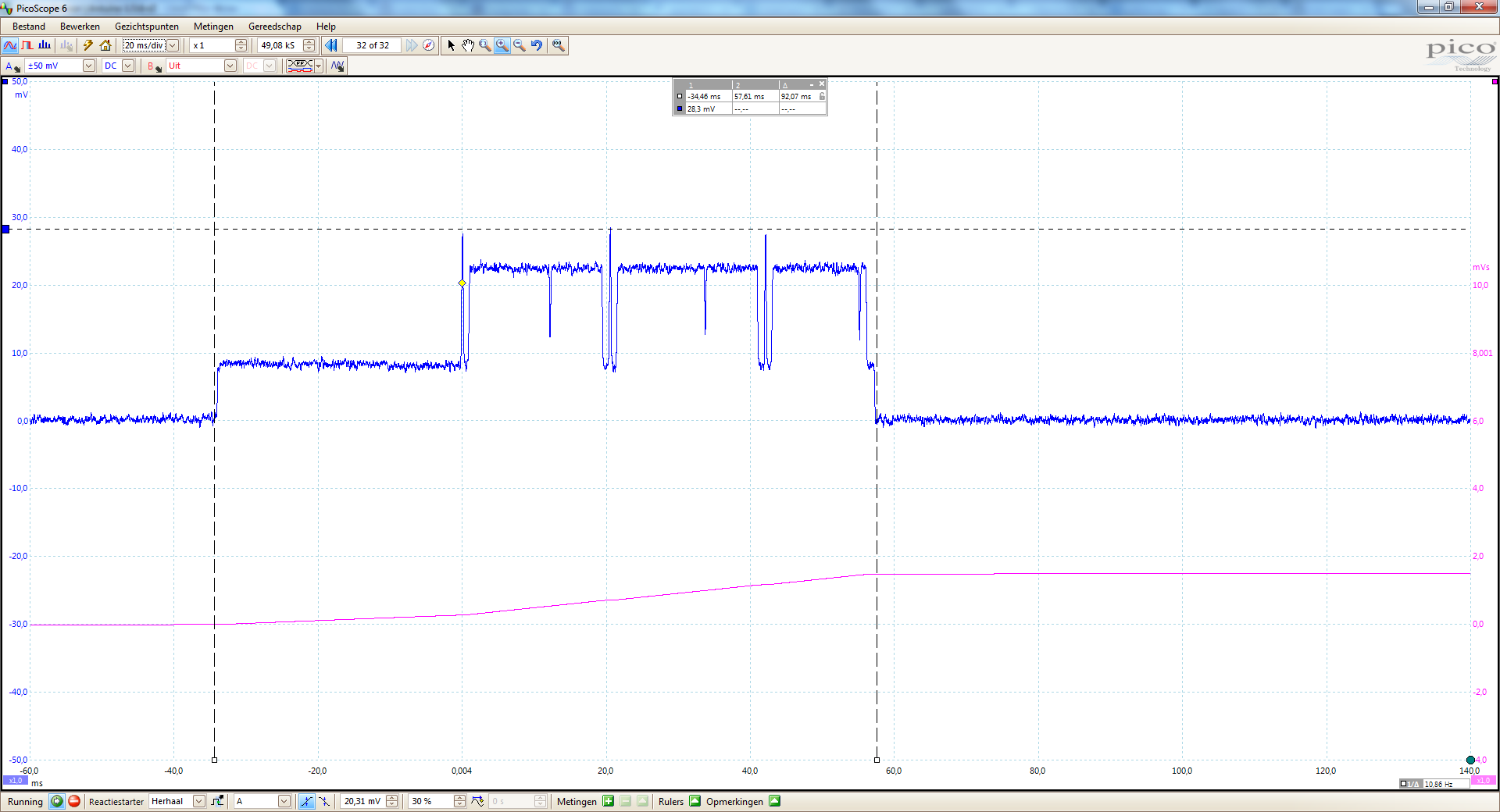
@therik Hi there. I took some time to connect my uCurrent & scope and ran a simple sketch which reads temp/hum from an SI7020 and light intensity from an LDR, powered from 2xAA batteries (no step-up ;-) ), regular nRF24 radio (no PA).
These 3 values are sent using MySensors 1.3 @1Mbps. Then the sensor node goes to sleep and the whole thing repeats.
This scope image shows the power consumption (blue) of a single wake-cycle (1mV == 1mA):In short, the interesting values are:
- The sleeping sensor consumes 154uA sleep current (incl. radio, SI7020, LDR) (Not in this scope image; measured separately)
- The total wake-time is only 92ms, of which approx. 33ms is waking up, reading sensors etc. Rest is radio + going to sleep again.
- When awake it peaks at 28mA.
There must be something very wrong with your setup, taking almost 1.5sec to send 1 message, thats for sure !
-
So am I seeing the power signature from sendng three packets for the results?
At 1 Mbps, a maximum packet (32 bytes) should take about 1/3 mSec. With successful auto-ack, there would be two turnarounds at 130 us each and an auto-ack packet at about 72 uS, say 2/3 msec per packet. Three packets should be done in not much over 2 mSec (including powerup time).
Of course, with failed auto-ack it can take much longer, given the timeout waiting for each missing ack and the auto retry. Worst case with 4 ms timeout and 15 retries is about 60 mSec; less than that for most settings.
@Yveaux was this test using failing auto-ack with retries?
And I gree that 1.5 sec doesn't make any sense, even at 250Kbps and maximal retries. Could the OP's time scale be off?
-
Any one presenting measurements should indicate if they are using Ver 1.3 or 1.4 of the code. There are significant differences in how the timing and ACKing is organized between the two. The OP is using 1.3 and I suspect @yVEAUX is using 1.4 - please correct me if I am wrong on that.
There is no point in trying compare results between 1.3 and 1.4 Any one using 1.3V will be far better off with 1.4.
-
Any one presenting measurements should indicate if they are using Ver 1.3 or 1.4 of the code. There are significant differences in how the timing and ACKing is organized between the two. The OP is using 1.3 and I suspect @yVEAUX is using 1.4 - please correct me if I am wrong on that.
There is no point in trying compare results between 1.3 and 1.4 Any one using 1.3V will be far better off with 1.4.
@a-lurker said:
Any one presenting measurements should indicate if they are using Ver 1.3 or 1.4 of the code.
And anyone stating rules should first read the posts with some attention; it's clearly in my post :-1:
These 3 values are sent using MySensors 1.3
-
So am I seeing the power signature from sendng three packets for the results?
At 1 Mbps, a maximum packet (32 bytes) should take about 1/3 mSec. With successful auto-ack, there would be two turnarounds at 130 us each and an auto-ack packet at about 72 uS, say 2/3 msec per packet. Three packets should be done in not much over 2 mSec (including powerup time).
Of course, with failed auto-ack it can take much longer, given the timeout waiting for each missing ack and the auto retry. Worst case with 4 ms timeout and 15 retries is about 60 mSec; less than that for most settings.
@Yveaux was this test using failing auto-ack with retries?
And I gree that 1.5 sec doesn't make any sense, even at 250Kbps and maximal retries. Could the OP's time scale be off?
@Zeph @Therik asks about thoughts on his power signature. I did a similar experiment to show him that his initial findings are, for some reason, far off.
I agree on your timing calculations (packet payloads are far shorter than 32 bytes, though), but for some reason my measurements do also not seem to agree with the calculated values.
I used default settings for the MySensors library and used version 1.3. There should be no ack but I've seen (using wireless sniffer) the receiving nRF24 send acks anyway. Still have to investigate why...
There could also be delays in the MySensors or nRF24 driver implementation (how about the crc8 calculation in MySensors 1.3? -- anyone timed it?), but these are unlikely to take several ms.Lets try to understand and help @therik improve his application! We will all benefit from it!
Update
@hek I had a quick look at the Sensor.cpp code and all sends seem to boil down to Sensor::sendWrite.
And what's in there? "WAIT FOR ACK" which can take 50ms???boolean Sensor::sendWrite(uint8_t dest, message_s message, int length) { // ... some init code RF24::stopListening(); RF24::openWritingPipe(TO_ADDR(dest)); RF24::write(&message, min(MAX_MESSAGE_LENGTH, sizeof(message.header) + length), broadcast); RF24::closeReadingPipe(WRITE_PIPE); // Stop listening to write-pipe after transmit RF24::startListening(); if (!broadcast) { // ---------------- WAIT FOR ACK ------------------ unsigned long startedWaiting = millis(); bool timeout = false; // Wait for ack message maximum 50 ms while ( !RF24::available() && !timeout ) { if (millis() - startedWaiting > ACK_MAX_WAIT ) { timeout = true; debug(PSTR("Ack: receive timeout\n")); ok = false; } } // Check payload size and content if (!timeout) { // Check payload size and content if (RF24::getDynamicPayloadSize()==sizeof(uint8_t)) { uint8_t idest; RF24::read( &idest, sizeof(uint8_t)); if (dest != idest) { debug(PSTR("Ack: received ack from the wrong sensor\n")); ok = false; } else { debug(PSTR("Ack: received OK\n")); } } else { ok = false; debug(PSTR("Ack: received none ack msg.\n")); } } } return ok; }Can you give us a quick explanation?
-
Yowsa.
Those three tiny spikes that go up to about 27 may be the actual transmissions, then.
-
@Yveaux said:
@hek I had a quick look at the Sensor.cpp code and all sends seem to boil down to Sensor::sendWrite.
And what's in there? "WAIT FOR ACK" which can take 50ms???This is the old inter-node ack mechanism used in 1.3 (long story why we had to do it like this). This should not be mixed up with full route ack messages used from source to final destination.
This code has been replaced by the NRF build-in ack/retransmission functionality in 1.4.
-
@Yveaux said:
@hek I had a quick look at the Sensor.cpp code and all sends seem to boil down to Sensor::sendWrite.
And what's in there? "WAIT FOR ACK" which can take 50ms???This is the old inter-node ack mechanism used in 1.3 (long story why we had to do it like this). This should not be mixed up with full route ack messages used from source to final destination.
This code has been replaced by the NRF build-in ack/retransmission functionality in 1.4.
-
Hi guys,
I checked again, with another scope (1 GHz Tektronix) and I get 1.44s total time. It must be hardware or software related, not measurement related. Any other ideas to fix? I need to run the node without a gateway, because the measurement must be made off-site from vera and the gateway.
-
@therik said:
No modification: current from battery: 2.24 mA, current to pro-mini: 1.63 mA
Remove LED: current form battery: 144 µA, current to pro-mini: 104 µA
Remove LED and regulator: current from battery: 48 µA, current to pro-mini: 23 µAThis refers to removing a power-on LED from the APM, right? (The LED from the china booster already being removed).
And you were feeding power to the APM's VCC (ie: output of it's onboard linear regulator) until the third measurement, where you removed the unused regulator as well from the APM?
That's excellent low power for a cheap booster!
Did you remove the LED and reg with a simple soldering iron?
Only thing is, that bottom trace looks kinda choppy. No problems with powering the radio directly from the booster?
(All this leaving aside the slow timing. I understand that 1.3's timeouts were 50ms and it probably did a bunch of them because there was nobody to respond, but why would the lower current first part - presumably doing sensor measurements - take so long?).
-
Hi guys,
I checked again, with another scope (1 GHz Tektronix) and I get 1.44s total time. It must be hardware or software related, not measurement related. Any other ideas to fix? I need to run the node without a gateway, because the measurement must be made off-site from vera and the gateway.
-
Okay, did the toggle test using the delayMicroseconds() method. I tested 96 µs, 1000 µs, and 10 ms and all were very close to the set delay, pins 6, 5, and 4 respectively. (@ 8 MHz the delay is a multiple of 8 µs).
It must be the fact that I'm trying the MySensors temperature sketch 'gatewayless'. I wonder if I can modify the sketch to not wait for an ACK. Of course, when I get a scope at home the 'gatewayless' operation will not be needed.
-
Okay, did the toggle test using the delayMicroseconds() method. I tested 96 µs, 1000 µs, and 10 ms and all were very close to the set delay, pins 6, 5, and 4 respectively. (@ 8 MHz the delay is a multiple of 8 µs).
It must be the fact that I'm trying the MySensors temperature sketch 'gatewayless'. I wonder if I can modify the sketch to not wait for an ACK. Of course, when I get a scope at home the 'gatewayless' operation will not be needed.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login