Mysensorized Roomba
-
Thanks for sharing this. You inspire me and i also made a similar solution during this weekend.:smiley:

But I have a problem. Maybe you could answer or someone from the forum.
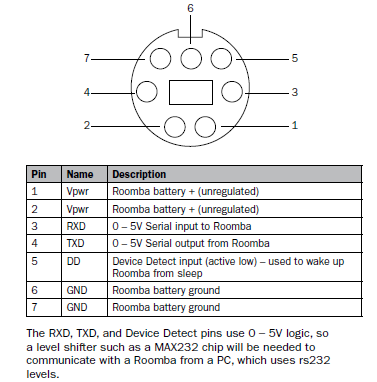
I can not wake up my vacuum (roomba 620) from the state of "suspension" to whose passes automatically after 5 minutes. (all diodes off). Complete code is on end of post.From old documentation "Roomba_SCI_Spec_Manual.pdf" wake up should looks like this
ser.setRTS (0) time.sleep (0.1) ser.setRTS (1) time.sleep (2)I can do it "hardware". It means when my yellow cabel from "DD" during insertion into arduino pinMode(D3, OUTPUT) ... roomba weak up all times.
But when cable is connect to D3 permanently and try send few times signals like this.
digitalWrite(D3, LOW); delay(10); digitalWrite(D3, HIGHT); delay(2);It didnt work.
Of course it wake up when i push button "clean" by finger. Did you have similar problem :question:
My full code is little more complicate and right now looks like this:#define MY_BAUD_RATE 115200 // Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node //#define MY_REPEATER_FEATURE #define MY_RF24_CHANNEL 76 // brama - kuchnia #define CHILD_ID_BATT_TEMP 100 // Id of the 2nd msg1_3 #define CHILD_ID_BATT_PROC 101 // Id of the 2nd msg1_4 #define CHILD_ID_BATT_VOLT 102 // Id of the 2nd msg1_2 #define CHILD_ID_BATT_AH 103 // Id of the 2nd msg2_5 #define CHILD_ID_BATT_CHARGE_TYPE 104 // Id of the 2nd msg1_1 #define CHILD_ID_BATT_CHARGE_SOURCE 105 // Id of the 2nd msg2_2 #include <SoftwareSerial.h> #include <MySensors.h> #define NUMBER_OF_FUNCTION 7 #define NUMBER_OF_SENSORS 6 int ddPin = 3; int rxPin = 6; int txPin = 7; SoftwareSerial roomba(rxPin, txPin); const char SWITCH_NAMES[NUMBER_OF_FUNCTION][14] = { "Roomba-Stop","Roomba-Dock","Roomba-Clean","Roomba-Spot","Roomba-Max","Roomba-Power","Roomba-Play" }; const char SENSORS_NAMES[NUMBER_OF_SENSORS][24] = { "Roomba-Batt-Temp","Roomba-Batt-Proc","Roomba-Batt-Volt", "Roomba-Batt-mAH" , "Roomba-Batt-CHt" , "Roomba-Batt-CHs" }; //for sensorgetting #define ROOMBA_READ_TIMEOUT 300 #define ROOMBA_WAKE_COUNT 10 uint8_t buf[52]; boolean lowBattery = true; // Acts as a debounce long battery_Current_mAh = 0; long battery_Total_mAh = 0; long battery_percent = 0; boolean DeadBattery = false; boolean FullBattery = true; unsigned long chargingState = 0; long voltage = 0; long temp = 0; long OiMode = 0; long ChargeSource = 0; long sensorfrequency = 60000; // frequency the sensors are read long lastsensorread = 0; // when were the sensors read the last time unsigned long lastsensorssend = 0; const char ChargeTypes[6][34] = { "Not charging","Reconditioning Charging","Full Charging","Trickle Charging","Waiting","Charging Fault Condition" }; const char OiTypes[4][14] = { "Off","Passive","Safe","Full" }; int packetSizes[58] = { 0,0,0,0,0,0, //1-6 1,1,1,1,1,1,1,1,1,1,1,1, //7-18 2,2, //19-20 1, //21 2,2, //22-23 1, //24 2,2,2,2,2,2,2, //25-31 1, //32 2, //33 1,1,1,1,1, //34-38 2,2,2,2,2,2, //39-44 1, //45 2,2,2,2,2,2, //46-51 1,1, //52-53 2,2,2,2, //54-57 1 //58 }; // Initialize messages MyMessage msg1_3(CHILD_ID_BATT_TEMP, V_TEMP); //status of Temperature MyMessage msg1_4(CHILD_ID_BATT_PROC, V_PH); //status of Charge [%] MyMessage msg1_2(CHILD_ID_BATT_VOLT, V_VOLTAGE); //status of Voltage MyMessage msg2_5(CHILD_ID_BATT_AH, V_CURRENT); //status of mAH MyMessage msg1_1(CHILD_ID_BATT_CHARGE_TYPE, V_TEXT); //status of charget type MyMessage msg2_2(CHILD_ID_BATT_CHARGE_SOURCE, V_TEXT); //status of charger source void setup() { pinMode(ddPin, OUTPUT); digitalWrite(ddPin, LOW); Serial.begin(115200); while (!Serial) { ; // wait for serial port to connect. Needed for native USB port only } roomba.begin(115200); //Serial.println("Sending start command..."); //delay(1000); //// set up ROI to receive commands defsongs(); delay(500); rstop(); Serial.println("Ready to go!"); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Roomba", "1.2"); for (int sensor = 0; sensor < NUMBER_OF_FUNCTION; sensor++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY, SWITCH_NAMES[sensor]); delay(100); } present(CHILD_ID_BATT_TEMP, S_TEMP, SENSORS_NAMES[0]); delay(100); present(CHILD_ID_BATT_PROC, S_WATER_QUALITY, SENSORS_NAMES[1]); delay(100); present(CHILD_ID_BATT_VOLT, S_MULTIMETER, SENSORS_NAMES[2]); delay(100); present(CHILD_ID_BATT_AH, S_MULTIMETER, SENSORS_NAMES[3]); delay(100); present(CHILD_ID_BATT_CHARGE_TYPE, S_INFO, SENSORS_NAMES[4]); delay(100); present(CHILD_ID_BATT_CHARGE_SOURCE, S_INFO, SENSORS_NAMES[5]); delay(100); } void loop() { unsigned long now = millis(); if (now > lastsensorssend + sensorfrequency) { readsensors(); lastsensorssend = now; } } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type == V_LIGHT) { int mySensor = message.sensor; int myComand = message.getBool(); //Serial.print(message.sensor); if (myComand == 1) { switch (mySensor) { case 0: Serial.println("Stop"); rstop(); break; case 1: Serial.println("Dock"); rcommand(143); break; case 2: Serial.println("Clean"); rcommand(135); break; case 3: Serial.println("Spot"); rcommand(134); break; case 4: Serial.println("Max"); rcommand(136); break; case 5: Serial.println("Power-Off"); rcommand(133); break; case 6: Serial.println("Song"); rcommand(141); rsong(0); break; } } } } void rstop() { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(137); delay(100); byte j = 0x00; roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(128); } } void rsong(int b) { roomba.write(b); delay(100); } void rcommand(int command) { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(command); } } void play(char note, int rlong) { roomba.write(rnote(note)); delay(10); roomba.write(64 / rlong); delay(10); } bool rwakeup() { bool ret = getSensors(6, buf, 52); Serial.print("wekup: "); Serial.print(ret); if (!ret) { for (int ii = 1; ii < ROOMBA_WAKE_COUNT; ii++) { for (int jj = 0; jj < 3; jj++) { digitalWrite(ddPin, HIGH); delay(10); digitalWrite(ddPin, LOW); delay(2); } delay(100); roomba.write(128); if (getSensors(6, buf, 52)) { ret = true; break; } Serial.print("-"); } } Serial.println(ret); return ret; } bool getSensors(uint8_t packetID, uint8_t* dest, uint8_t len) { roomba.write(142); delay(100); roomba.write(packetID); delay(100); return getData(dest, len); } bool getData(uint8_t* dest, uint8_t len) { while (len-- > 0) { unsigned long startTime = millis(); while (!roomba.available()) { // Look for a timeout if (millis() > startTime + ROOMBA_READ_TIMEOUT) return false; // Timed out } *dest++ = roomba.read(); } return true; } //for sensorgetting int getPacketSize(int p) { return packetSizes[p - 1]; } int getPacketOffset(int p) { int i = 0; for (int s = 1; s < p; s++) { i += getPacketSize(s); } return i; } //read sensors void readsensors() { if (getSensors(6, buf, 52)) { int off = 0; // Battery Checks off = getPacketOffset(21); chargingState = buf[off + 0]; voltage = buf[off + 2] + 256 * buf[off + 1]; temp = buf[off + 5]; battery_Current_mAh = buf[off + 7] + 256 * buf[off + 6]; battery_Total_mAh = buf[off + 9] + 256 * buf[off + 8]; if (battery_Total_mAh == 0) battery_Total_mAh = 1; int nBatPcent = battery_Current_mAh * 100 / battery_Total_mAh; battery_percent = nBatPcent; //Oi Mode off = getPacketOffset(35); OiMode = buf[off + 0]; //ChargeSource off = getPacketOffset(34); ChargeSource = buf[off + 0]; send(msg1_3.set(temp)); delay(100); send(msg1_4.set(battery_percent)); delay(100); send(msg1_2.set(round(voltage / 10), 1)); delay(100); send(msg2_5.set(battery_Current_mAh)); delay(100); send(msg1_1.set(ChargeTypes[chargingState])); delay(100); send(msg2_2.set(ChargeSource)); delay(100); //send(msg2_5.set(chargingState)); // Send info value to gw //send(msg2_5.set("charging state")); // Send info value to gw //send(msg2_5.set(battery_Total_mAh)); // Send info value to gw //send(msg2_1.set(OiTypes[OiMode])); // Send info value to gw lastsensorread = millis(); } else { send(msg1_1.set("roomba is off")); } // Send info value to gw } void defsongs() { uint8_t zero = 0; roomba.write(128); delay(100); roomba.write(131); delay(100); //[128 131](Start the command stream and change roomba mode to "Safe" mode) roomba.write(140); delay(100); roomba.write(zero); delay(100); //[140 0](Start song definition and define the first song, song number 0) roomba.write(25); //[16](16 notes will be sent for song number 0) play('E', 4); //[76 16](play Mi sound for 1 / 4 seconds) // E play('E', 4); play('E', 2); play('E', 4); play('E', 4); play('E', 2); //[76 32](play Mi sound for 1 / 2 seconds) play('E', 4); play('G', 4); play('C', 4); play('D', 4); play('E', 1); play('F', 4); play('F', 4); play('F', 2); play('F', 4); play('E', 4); play('E', 2); play('E', 4); play('D', 4); play('D', 4); play('E', 4); play('D', 1); delay(100); roomba.write(128); } int rnote(char note) { int command = 31; switch (note) { case 'C': command = 72; break; case 'D': command = 74; break; case 'E': command = 76; break; case 'F': command = 77; break; case 'G': command = 79; break; } return command; } -
Hi Eoreh
Maybe problem is in this line:
digitalWrite(D3, HIGHT); delay(2);Did you defined HIGHT symbol?
Actually I did it this way:
void WakeUp() { pinMode(DEVICE_DETECT_PIN, OUTPUT); digitalWrite(DEVICE_DETECT_PIN, HIGH); delay(1000); digitalWrite(DEVICE_DETECT_PIN, LOW); delay(1000); digitalWrite(DEVICE_DETECT_PIN, HIGH); }and it works flawlessly (Ihave other problem with hanging NRF24, but it is another case)
-
Hi !
My bad. I type mistake in post on forum. In code is good version. Of course You have right should be "HIGH"But You give me some idea on "problem in line D3" . I plugin my logic analizer (Saleae) and bingo!. In my egz. arduino this port was "broken" and dont give any change signal. I plugin into D5 and all works. :heart_eyes:
I have one small issue / feature. After play song -> (in my code upper this song is Jingle bell for Chrismas) - roomba dont react on buttons. I think i will change this. Also statistic is very bad write. It's also for rewrite.
Now i have to do more test, and next make looking good case for "node" on roomba. (cos mother-in-law - kill me :) ). But right now im very happy.
Thank you @emka for your replay.
-
Hello Eoreh,
I have a older Roomba and had the same idea to control it by my sensors. I only did a other approach.
I did not mondify the Roomba with a serial interface and a MySensors node on the Roomba. But I did put a MySensors node on the docking station. And control the clean/spot/max command by imitation of the IR commands with a IR Led on the MySensors Node. And I also detect with my nod if the Roomba is in his dock charging or not. With this dock notification I measure the amount of time the Roomba is on its way before it returns to its dock charging (which is also a indication of the quality of the Roomba battery, short time away is a bad battery). I also measure the room temperature and humidity with the same node.
If you want to know the code let me know I show you.
With this approach you don't need to put anything on top of the Roomba which wil get broken off (is my experience) when its e.g. working under the bench.
See the pictures in the link of this setup: -
HI !.
@EmielA said:With this approach you don't need to put anything on top of the Roomba which wil get broken off (is my experience) when its e.g. working under the bench.
I have only 1 dock station and many rooms :). My roomba dont going "under the bench" so i dont have experience like yours with sensor on top.
But will be interested looks for code in your approach so please show it.
Thank You.
-
Eoreh,
I used different pieces of code from different projects.and combined them to one sketch. I used some from this project : link text
And the sketch from the MySensors Relay Actuator. I switch the Node/Relay on for about 10 seconds and then off. In the 10 seconds the IR sends the CLEAN command. With a LDR I detect if the Roomba dock led is on or off. So I detect if the Roomba is on its dock. Here under the code I hope it helps you.// Example sketch showing how to control physical relays. // This example will remember relay state even after power failure. #include <MySensor.h> #include <SPI.h> #include <IRremote.h> #include <DHT.h> #include <Bounce2.h> #define RELAY_1 3 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define NUMBER_OF_RELAYS 1 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define CHILD_ID_HUM 0 #define CHILD_ID_TEMP 1 #define CHILD_ID_DOCK 5 #define HUMIDITY_SENSOR_DIGITAL_PIN 4 // Temperatuur sensor and Humidity op pin 4 input #define DOCK_SENSOR_PIN 5 // Light sensor on pin 5 input unsigned long WAIT_TIME = 15000; // Wait time between reads (in milliseconds) IRsend irsend; // hardwired to pin 3; use a transistor to drive the IR LED for maximal range MySensor gw; Bounce debouncer = Bounce(); DHT dht; int oldValue=-1; //light sensor float lastTemp; float lastHum; boolean metric = true; MyMessage msgHum(CHILD_ID_HUM, V_HUM); MyMessage msgTemp(CHILD_ID_TEMP, V_TEMP); // Change to V_LIGHT if you use S_LIGHT in presentation below MyMessage msgDock(CHILD_ID_DOCK,V_TRIPPED); void setup() { // Initialize library and add callback for incoming messages gw.begin(incomingMessage, AUTO, true); // Setup the DOCK_SENSOR to input pinMode(DOCK_SENSOR_PIN,INPUT); // After setting up the button, setup debouncer debouncer.attach(DOCK_SENSOR_PIN); debouncer.interval(5); dht.setup(HUMIDITY_SENSOR_DIGITAL_PIN); // Send the sketch version information to the gateway and Controller gw.sendSketchInfo("Temp Humidity and Roomba IR", "1.0"); // Register all sensors to gw (they will be created as child devices) gw.present(CHILD_ID_HUM, S_HUM); gw.present(CHILD_ID_TEMP, S_TEMP); gw.present(CHILD_ID_DOCK, S_DOOR); metric = gw.getConfig().isMetric; // Fetch relay status for (int sensor=2, pin=RELAY_1; sensor<=NUMBER_OF_RELAYS;sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) gw.present(sensor, V_LIGHT); // Then set relay pins in output mode pinMode(pin, OUTPUT); // Set relay to last known state (using eeprom storage) digitalWrite(pin, gw.loadState(sensor)?RELAY_ON:RELAY_OFF); } } void loop() { // Alway process incoming messages whenever possible { delay(dht.getMinimumSamplingPeriod()); float temperature = dht.getTemperature(); if (isnan(temperature)) { Serial.println("Failed reading temperature from DHT"); } else if (temperature != lastTemp) { lastTemp = temperature; if (!metric) { temperature = dht.toFahrenheit(temperature); } gw.send(msgTemp.set(temperature, 1)); Serial.print("T: "); Serial.println(temperature); } float humidity = dht.getHumidity(); if (isnan(humidity)) { Serial.println("Failed reading humidity from DHT"); } else if (humidity != lastHum) { lastHum = humidity; gw.send(msgHum.set(humidity, 1)); Serial.print("H: "); Serial.println(humidity); } debouncer.update(); // Get the update value int value = debouncer.read(); if (value != oldValue) { // Send in the new value gw.send(msgDock.set(value==HIGH ? 1 : 0)); oldValue = value; } gw.wait(WAIT_TIME); //sleep a bit } } void incomingMessage(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_LIGHT) { // Change relay state // digitalWrite(message.sensor-1+RELAY_1, message.getBool()?RELAY_ON:RELAY_OFF); roomba_send(136); // Send "Clean" // Store state in eeprom gw.saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } void roomba_send(int code) { Serial.print("Sending Roomba code "); Serial.print(code); int length = 8; unsigned int raw[length*2]; unsigned int one_pulse = 3000; unsigned int one_break = 1000; unsigned int zero_pulse = one_break; unsigned int zero_break = one_pulse; int arrayposition = 0; // Serial.println(""); for (int counter = length-1; counter >= 0; --counter) { if(code & (1<<counter)) { // Serial.print("1"); raw[arrayposition] = one_pulse; raw[arrayposition+1] = one_break; } else { // Serial.print("0"); raw[arrayposition] = zero_pulse; raw[arrayposition+1] = zero_break; } arrayposition = arrayposition + 2; } for (int i = 0; i < 3; i++) { irsend.sendRaw(raw, 15, 38); delay(50); } Serial.println(""); Serial.print("Raw timings:"); for (int z=0; z<length*2; z++) { Serial.print(" "); Serial.print(raw[z]); } Serial.print("\n\n"); } -
Maybe this is off topic but I'm going to buy a roomba but it is so many versions. Will roomba 615 or 616 do the job or is the newer versions smarter cleaner? I have around 80kvd
-
@Eawo I do have a 581 and not 100% sure what has been changed on newer models. Maybe you ask in a roomba forum
All,
I did some updates also thanks to @Eoreh I updated my code a bit. Anyhow, no really news on software side but was able to fit it more or less completely inside of the Roomba.-
I wanted to fit all inside and I think there is enough space but wanted to be able to disable it and thought about a dip-switch somewhere but then decided to have it connected via DIN as before. Means also no soldering on Roomba
-
finding a spot was easy:

There is enough space on the side of the bin. (In picture, the external charging port was already removed) -
I soldered all together and decided to opt for a Nano instead of a Pro Mini due to the lack of 3.3V on board. I know radio might be better powered with a voltage regulator but the reception and reliability is not too important here. Anyhow not experienced any issues so far. I also used the SMD radio to save some extra space.
The voltage regulator has a heat sink mounted which is pointing where the charing port was and is getting some "fresh air" ;-)

-
all in place and ready to be closed again

-
closed without top plate

If it stops working or needs a reset, I only need to unplug and replug
-
-
All,
I did some updates also thanks to @Eoreh I updated my code a bit. Anyhow, no really news on software side but was able to fit it more or less completely inside of the Roomba.-
I wanted to fit all inside and I think there is enough space but wanted to be able to disable it and thought about a dip-switch somewhere but then decided to have it connected via DIN as before. Means also no soldering on Roomba
-
finding a spot was easy:
There is enough space on the side of the bin. (In picture, the external charging port was already removed) -
I soldered all together and decided to opt for a Nano instead of a Pro Mini due to the lack of 3.3V on board. I know radio might be better powered with a voltage regulator but the reception and reliability is not too important here. Anyhow not experienced any issues so far. I also used the SMD radio to save some extra space.
The voltage regulator has a heat sink mounted which is pointing where the charing port was and is getting some "fresh air" ;-)
-
all in place and ready to be closed again
-
closed without top plate
If it stops working or needs a reset, I only need to unplug and replug
@parachutesj Mind posting your finished code?
Also wonder what is the correct MQTT payload to start for example cleaning?
Upon start i see the following
mys-out/15/255/3/0/11 MYS Roomba
mys-out/15/255/3/0/12 2.1
mys-out/15/0/0/0/3 Roomba-Stop
mys-out/15/1/0/0/3 Roomba-Dock
mys-out/15/2/0/0/3 Roomba-Clean
mys-out/15/3/0/0/3 Roomba-Spot
mys-out/15/4/0/0/3 Roomba-Max
mys-out/15/5/0/0/3 Roomba-Power
mys-out/15/6/0/0/3 Roomba-Play
mys-out/15/100/0/0/6 Roomba-Batt-Temp
mys-out/15/101/0/0/39 Roomba-Batt-Proc
mys-out/15/102/0/0/30 Roomba-Batt-Volt
mys-out/15/103/0/0/30 Roomba-Batt-mAH
mys-out/15/104/0/0/36 Roomba-Batt-CHt
mys-out/15/105/0/0/36 Roomba-Batt-CHsBut publishing to
mys-in/15/2/1/0/3
mys-in/15/2/1/0/2with payload 1 doesn't do anything
-
-
@parachutesj Mind posting your finished code?
Also wonder what is the correct MQTT payload to start for example cleaning?
Upon start i see the following
mys-out/15/255/3/0/11 MYS Roomba
mys-out/15/255/3/0/12 2.1
mys-out/15/0/0/0/3 Roomba-Stop
mys-out/15/1/0/0/3 Roomba-Dock
mys-out/15/2/0/0/3 Roomba-Clean
mys-out/15/3/0/0/3 Roomba-Spot
mys-out/15/4/0/0/3 Roomba-Max
mys-out/15/5/0/0/3 Roomba-Power
mys-out/15/6/0/0/3 Roomba-Play
mys-out/15/100/0/0/6 Roomba-Batt-Temp
mys-out/15/101/0/0/39 Roomba-Batt-Proc
mys-out/15/102/0/0/30 Roomba-Batt-Volt
mys-out/15/103/0/0/30 Roomba-Batt-mAH
mys-out/15/104/0/0/36 Roomba-Batt-CHt
mys-out/15/105/0/0/36 Roomba-Batt-CHsBut publishing to
mys-in/15/2/1/0/3
mys-in/15/2/1/0/2with payload 1 doesn't do anything
@moskovskiy82 I did not change too much compared to @EmielA on the code. worked pretty good until I bought a new roomba recently. Haven't tried it on the 980 yet:
// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node #define MY_REPEATER_FEATURE #define CHILD_ID_BATT_TEMP 100 // Id of the 2nd msg1_3 #define CHILD_ID_BATT_PROC 101 // Id of the 2nd msg1_4 #define CHILD_ID_BATT_VOLT 102 // Id of the 2nd msg1_2 #define CHILD_ID_BATT_AH 103 // Id of the 2nd msg2_5 #define CHILD_ID_BATT_CHARGE_TYPE 104 // Id of the 2nd msg1_1 #define CHILD_ID_BATT_CHARGE_SOURCE 105 // Id of the 2nd msg2_2 #include <MySensors.h> #include <SoftwareSerial.h> //#define RELAY_1 5 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) //#define NUMBER_OF_RELAYS 2 // Total number of attached relays //#define RELAY_ON 1 // GPIO value to write to turn on attached relay //#define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define NUMBER_OF_FUNCTION 7 #define NUMBER_OF_SENSORS 6 #define ROOMBA_READ_TIMEOUT 300 #define ROOMBA_WAKE_COUNT 10 int ddPin = 6; int rxPin = 3; int txPin = 4; int ledPin = 13; SoftwareSerial roomba(rxPin, txPin); const char SWITCH_NAMES[NUMBER_OF_FUNCTION][14] = { "Roomba-Stop","Roomba-Dock","Roomba-Clean","Roomba-Spot","Roomba-Max","Roomba-Power","Roomba-Play" }; const char SENSORS_NAMES[NUMBER_OF_SENSORS][24] = { "Roomba-Batt-Temp","Roomba-Batt-Proc","Roomba-Batt-Volt", "Roomba-Batt-mAH" , "Roomba-Batt-CHt" , "Roomba-Batt-CHs" }; uint8_t buf[52]; boolean lowBattery = true; // Acts as a debounce long battery_Current_mAh = 0; long battery_Total_mAh = 0; long battery_percent = 0; boolean DeadBattery = false; boolean FullBattery = true; unsigned long chargingState = 0; long voltage = 0; long temp = 0; long OiMode = 0; long ChargeSource = 0; long sensorfrequency = 300000; // 300000 = 5 min - frequency the sensors are read long lastsensorread = 0; // when were the sensors read the last time unsigned long lastsensorssend = 0; const char ChargeTypes[6][34] = { "Not charging","Reconditioning Charging","Full Charging","Trickle Charging","Waiting","Charging Fault Condition" }; const char OiTypes[4][14] = { "Off","Passive","Safe","Full" }; int packetSizes[58] = { 0,0,0,0,0,0, //1-6 1,1,1,1,1,1,1,1,1,1,1,1, //7-18 2,2, //19-20 1, //21 2,2, //22-23 1, //24 2,2,2,2,2,2,2, //25-31 1, //32 2, //33 1,1,1,1,1, //34-38 2,2,2,2,2,2, //39-44 1, //45 2,2,2,2,2,2, //46-51 1,1, //52-53 2,2,2,2, //54-57 1 //58 }; #define bumpright (sensorbytes[0] & 0x01) #define bumpleft (sensorbytes[0] & 0x02) MyMessage msg1_3(CHILD_ID_BATT_TEMP, V_TEMP); //status of Temperature MyMessage msg1_4(CHILD_ID_BATT_PROC, V_PH); //status of Charge [%] MyMessage msg1_2(CHILD_ID_BATT_VOLT, V_VOLTAGE); //status of Voltage MyMessage msg2_5(CHILD_ID_BATT_AH, V_CURRENT); //status of mAH MyMessage msg1_1(CHILD_ID_BATT_CHARGE_TYPE, V_TEXT); //status of charget type MyMessage msg2_2(CHILD_ID_BATT_CHARGE_SOURCE, V_TEXT); //status of charger source void setup() { pinMode(ddPin, OUTPUT); digitalWrite(ddPin, LOW); Serial.begin(115200); while (!Serial) { ; // wait for serial port to connect. Needed for native USB port only } roomba.begin(115200); //Serial.println("Sending start command..."); //delay(1000); //// set up ROI to receive commands defsongs(); delay(500); rstop(); Serial.println("Ready to go!"); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Roomba", "1.2"); for (int sensor = 0; sensor < NUMBER_OF_FUNCTION; sensor++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY, SWITCH_NAMES[sensor]); delay(100); } present(CHILD_ID_BATT_TEMP, S_TEMP, SENSORS_NAMES[0]); delay(100); present(CHILD_ID_BATT_PROC, S_WATER_QUALITY, SENSORS_NAMES[1]); delay(100); present(CHILD_ID_BATT_VOLT, S_MULTIMETER, SENSORS_NAMES[2]); delay(100); present(CHILD_ID_BATT_AH, S_MULTIMETER, SENSORS_NAMES[3]); delay(100); present(CHILD_ID_BATT_CHARGE_TYPE, S_INFO, SENSORS_NAMES[4]); delay(100); present(CHILD_ID_BATT_CHARGE_SOURCE, S_INFO, SENSORS_NAMES[5]); delay(100); } void loop() { unsigned long now = millis(); if (now > lastsensorssend + sensorfrequency) { readsensors(); lastsensorssend = now; } } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type == V_LIGHT) { int mySensor = message.sensor; int myComand = message.getBool(); //Serial.print(message.sensor-1+RELAY_1); if (mySensor == 0) { if (myComand == 1) { Serial.println("Clean"); //clean(); rcommand(135); } else { Serial.println("Stopp1"); //halt(); rstop(); } } if (mySensor == 1) { if (myComand == 1) { Serial.println("dock"); //dock(); rcommand(143); } else { Serial.println("Stopp2"); //halt(); rstop(); } } if (mySensor == 2) { if (myComand == 1) { Serial.println("song"); //dock(); rcommand(141); rsong(0); } else { Serial.println("Stopp2"); //halt(); rstop(); } } } } void halt() { ; roomba.write(131); // SAFE byte j = 0x00; roomba.write(137); roomba.write(j); roomba.write(j); roomba.write(j); roomba.write(j); } void dock() { delay(1000); roomba.write(143); } void clean() { delay(1000); roomba.write(135); } void rstop() { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(137); delay(100); byte j = 0x00; roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(128); } } void rsong(int b) { roomba.write(b); delay(100); } void rcommand(int command) { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(command); } } void play(char note, int rlong) { roomba.write(rnote(note)); delay(10); roomba.write(64 / rlong); delay(10); } bool rwakeup() { bool ret = getSensors(6, buf, 52); Serial.print("wakeup: "); Serial.print(ret); if (!ret) { for (int ii = 1; ii < ROOMBA_WAKE_COUNT; ii++) { for (int jj = 0; jj < 3; jj++) { digitalWrite(ddPin, HIGH); delay(10); digitalWrite(ddPin, LOW); delay(2); } delay(100); roomba.write(128); if (getSensors(6, buf, 52)) { ret = true; break; } Serial.print("-"); } } Serial.println(ret); return ret; } bool getSensors(uint8_t packetID, uint8_t* dest, uint8_t len) { roomba.write(142); delay(100); roomba.write(packetID); delay(100); return getData(dest, len); } bool getData(uint8_t* dest, uint8_t len) { while (len-- > 0) { unsigned long startTime = millis(); while (!roomba.available()) { // Look for a timeout if (millis() > startTime + ROOMBA_READ_TIMEOUT) return false; // Timed out } *dest++ = roomba.read(); } return true; } //for sensorgetting int getPacketSize(int p) { return packetSizes[p - 1]; } int getPacketOffset(int p) { int i = 0; for (int s = 1; s < p; s++) { i += getPacketSize(s); } return i; } //read sensors void readsensors() { if (getSensors(6, buf, 52)) { int off = 0; // Battery Checks off = getPacketOffset(21); chargingState = buf[off + 0]; voltage = buf[off + 2] + 256 * buf[off + 1]; temp = buf[off + 5]; battery_Current_mAh = buf[off + 7] + 256 * buf[off + 6]; battery_Total_mAh = buf[off + 9] + 256 * buf[off + 8]; if (battery_Total_mAh == 0) battery_Total_mAh = 1; int nBatPcent = battery_Current_mAh * 100 / battery_Total_mAh; battery_percent = nBatPcent; //Oi Mode off = getPacketOffset(35); OiMode = buf[off + 0]; //ChargeSource off = getPacketOffset(34); ChargeSource = buf[off + 0]; send(msg1_3.set(temp)); delay(100); send(msg1_4.set(battery_percent)); delay(100); send(msg1_2.set(round(voltage / 10), 1)); delay(100); send(msg2_5.set(battery_Current_mAh)); delay(100); send(msg1_1.set(ChargeTypes[chargingState])); delay(100); send(msg2_2.set(ChargeSource)); delay(100); //send(msg2_5.set(chargingState)); // Send info value to gw //send(msg2_5.set("charging state")); // Send info value to gw //send(msg2_5.set(battery_Total_mAh)); // Send info value to gw //send(msg2_1.set(OiTypes[OiMode])); // Send info value to gw lastsensorread = millis(); } else { send(msg1_1.set("roomba is off")); } // Send info value to gw } void defsongs() { uint8_t zero = 0; roomba.write(128); delay(100); roomba.write(131); delay(100); //[128 131](Start the command stream and change roomba mode to "Safe" mode) roomba.write(140); delay(100); roomba.write(zero); delay(100); //[140 0](Start song definition and define the first song, song number 0) roomba.write(25); //[16](16 notes will be sent for song number 0) play('E', 4); //[76 16](play Mi sound for 1 / 4 seconds) // E play('E', 4); play('E', 2); play('E', 4); play('E', 4); play('E', 2); //[76 32](play Mi sound for 1 / 2 seconds) play('E', 4); play('G', 4); play('C', 4); play('D', 4); play('E', 1); play('F', 4); play('F', 4); play('F', 2); play('F', 4); play('E', 4); play('E', 2); play('E', 4); play('D', 4); play('D', 4); play('E', 4); play('D', 1); delay(100); roomba.write(128); } int rnote(char note) { int command = 31; switch (note) { case 'C': command = 72; break; case 'D': command = 74; break; case 'E': command = 76; break; case 'F': command = 77; break; case 'G': command = 79; break; } return command; } -
Just a question, but wouldn't it be an esp8266 a more compact solution? (Not to mention the quick ota programming) Or the roomba is running 5v serial output?
@gohan ESP is probably a good alternative. but then again you could also buy an after market wireless module for your roomba.
I am not sure about the serial output, but I think it is 5v.but there is plenty of space for a nano or pro mini. wemos mini or nodemcu should also fit
-
ESP is the best solution although couldn't find the code with sensors (only clean/dock commands). I recently made a post on HomeAssistant forum - how wemos D1 fits nicely inside. You only need a buck converter and 4 cat5 wires soldered. And 5V serial output is not such a big problem as you need a voltage divider only on rx pin (didn't put it)
P.S. But then one of those "machine revolt weeks happened" so my esproomba didn't respond and then i burned it down. Next day my RPi3 went down with HA and lots of goodies. And today ESXi...
-
@moskovskiy82 I did not change too much compared to @EmielA on the code. worked pretty good until I bought a new roomba recently. Haven't tried it on the 980 yet:
// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node #define MY_REPEATER_FEATURE #define CHILD_ID_BATT_TEMP 100 // Id of the 2nd msg1_3 #define CHILD_ID_BATT_PROC 101 // Id of the 2nd msg1_4 #define CHILD_ID_BATT_VOLT 102 // Id of the 2nd msg1_2 #define CHILD_ID_BATT_AH 103 // Id of the 2nd msg2_5 #define CHILD_ID_BATT_CHARGE_TYPE 104 // Id of the 2nd msg1_1 #define CHILD_ID_BATT_CHARGE_SOURCE 105 // Id of the 2nd msg2_2 #include <MySensors.h> #include <SoftwareSerial.h> //#define RELAY_1 5 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) //#define NUMBER_OF_RELAYS 2 // Total number of attached relays //#define RELAY_ON 1 // GPIO value to write to turn on attached relay //#define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define NUMBER_OF_FUNCTION 7 #define NUMBER_OF_SENSORS 6 #define ROOMBA_READ_TIMEOUT 300 #define ROOMBA_WAKE_COUNT 10 int ddPin = 6; int rxPin = 3; int txPin = 4; int ledPin = 13; SoftwareSerial roomba(rxPin, txPin); const char SWITCH_NAMES[NUMBER_OF_FUNCTION][14] = { "Roomba-Stop","Roomba-Dock","Roomba-Clean","Roomba-Spot","Roomba-Max","Roomba-Power","Roomba-Play" }; const char SENSORS_NAMES[NUMBER_OF_SENSORS][24] = { "Roomba-Batt-Temp","Roomba-Batt-Proc","Roomba-Batt-Volt", "Roomba-Batt-mAH" , "Roomba-Batt-CHt" , "Roomba-Batt-CHs" }; uint8_t buf[52]; boolean lowBattery = true; // Acts as a debounce long battery_Current_mAh = 0; long battery_Total_mAh = 0; long battery_percent = 0; boolean DeadBattery = false; boolean FullBattery = true; unsigned long chargingState = 0; long voltage = 0; long temp = 0; long OiMode = 0; long ChargeSource = 0; long sensorfrequency = 300000; // 300000 = 5 min - frequency the sensors are read long lastsensorread = 0; // when were the sensors read the last time unsigned long lastsensorssend = 0; const char ChargeTypes[6][34] = { "Not charging","Reconditioning Charging","Full Charging","Trickle Charging","Waiting","Charging Fault Condition" }; const char OiTypes[4][14] = { "Off","Passive","Safe","Full" }; int packetSizes[58] = { 0,0,0,0,0,0, //1-6 1,1,1,1,1,1,1,1,1,1,1,1, //7-18 2,2, //19-20 1, //21 2,2, //22-23 1, //24 2,2,2,2,2,2,2, //25-31 1, //32 2, //33 1,1,1,1,1, //34-38 2,2,2,2,2,2, //39-44 1, //45 2,2,2,2,2,2, //46-51 1,1, //52-53 2,2,2,2, //54-57 1 //58 }; #define bumpright (sensorbytes[0] & 0x01) #define bumpleft (sensorbytes[0] & 0x02) MyMessage msg1_3(CHILD_ID_BATT_TEMP, V_TEMP); //status of Temperature MyMessage msg1_4(CHILD_ID_BATT_PROC, V_PH); //status of Charge [%] MyMessage msg1_2(CHILD_ID_BATT_VOLT, V_VOLTAGE); //status of Voltage MyMessage msg2_5(CHILD_ID_BATT_AH, V_CURRENT); //status of mAH MyMessage msg1_1(CHILD_ID_BATT_CHARGE_TYPE, V_TEXT); //status of charget type MyMessage msg2_2(CHILD_ID_BATT_CHARGE_SOURCE, V_TEXT); //status of charger source void setup() { pinMode(ddPin, OUTPUT); digitalWrite(ddPin, LOW); Serial.begin(115200); while (!Serial) { ; // wait for serial port to connect. Needed for native USB port only } roomba.begin(115200); //Serial.println("Sending start command..."); //delay(1000); //// set up ROI to receive commands defsongs(); delay(500); rstop(); Serial.println("Ready to go!"); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Roomba", "1.2"); for (int sensor = 0; sensor < NUMBER_OF_FUNCTION; sensor++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY, SWITCH_NAMES[sensor]); delay(100); } present(CHILD_ID_BATT_TEMP, S_TEMP, SENSORS_NAMES[0]); delay(100); present(CHILD_ID_BATT_PROC, S_WATER_QUALITY, SENSORS_NAMES[1]); delay(100); present(CHILD_ID_BATT_VOLT, S_MULTIMETER, SENSORS_NAMES[2]); delay(100); present(CHILD_ID_BATT_AH, S_MULTIMETER, SENSORS_NAMES[3]); delay(100); present(CHILD_ID_BATT_CHARGE_TYPE, S_INFO, SENSORS_NAMES[4]); delay(100); present(CHILD_ID_BATT_CHARGE_SOURCE, S_INFO, SENSORS_NAMES[5]); delay(100); } void loop() { unsigned long now = millis(); if (now > lastsensorssend + sensorfrequency) { readsensors(); lastsensorssend = now; } } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type == V_LIGHT) { int mySensor = message.sensor; int myComand = message.getBool(); //Serial.print(message.sensor-1+RELAY_1); if (mySensor == 0) { if (myComand == 1) { Serial.println("Clean"); //clean(); rcommand(135); } else { Serial.println("Stopp1"); //halt(); rstop(); } } if (mySensor == 1) { if (myComand == 1) { Serial.println("dock"); //dock(); rcommand(143); } else { Serial.println("Stopp2"); //halt(); rstop(); } } if (mySensor == 2) { if (myComand == 1) { Serial.println("song"); //dock(); rcommand(141); rsong(0); } else { Serial.println("Stopp2"); //halt(); rstop(); } } } } void halt() { ; roomba.write(131); // SAFE byte j = 0x00; roomba.write(137); roomba.write(j); roomba.write(j); roomba.write(j); roomba.write(j); } void dock() { delay(1000); roomba.write(143); } void clean() { delay(1000); roomba.write(135); } void rstop() { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(137); delay(100); byte j = 0x00; roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(128); } } void rsong(int b) { roomba.write(b); delay(100); } void rcommand(int command) { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(command); } } void play(char note, int rlong) { roomba.write(rnote(note)); delay(10); roomba.write(64 / rlong); delay(10); } bool rwakeup() { bool ret = getSensors(6, buf, 52); Serial.print("wakeup: "); Serial.print(ret); if (!ret) { for (int ii = 1; ii < ROOMBA_WAKE_COUNT; ii++) { for (int jj = 0; jj < 3; jj++) { digitalWrite(ddPin, HIGH); delay(10); digitalWrite(ddPin, LOW); delay(2); } delay(100); roomba.write(128); if (getSensors(6, buf, 52)) { ret = true; break; } Serial.print("-"); } } Serial.println(ret); return ret; } bool getSensors(uint8_t packetID, uint8_t* dest, uint8_t len) { roomba.write(142); delay(100); roomba.write(packetID); delay(100); return getData(dest, len); } bool getData(uint8_t* dest, uint8_t len) { while (len-- > 0) { unsigned long startTime = millis(); while (!roomba.available()) { // Look for a timeout if (millis() > startTime + ROOMBA_READ_TIMEOUT) return false; // Timed out } *dest++ = roomba.read(); } return true; } //for sensorgetting int getPacketSize(int p) { return packetSizes[p - 1]; } int getPacketOffset(int p) { int i = 0; for (int s = 1; s < p; s++) { i += getPacketSize(s); } return i; } //read sensors void readsensors() { if (getSensors(6, buf, 52)) { int off = 0; // Battery Checks off = getPacketOffset(21); chargingState = buf[off + 0]; voltage = buf[off + 2] + 256 * buf[off + 1]; temp = buf[off + 5]; battery_Current_mAh = buf[off + 7] + 256 * buf[off + 6]; battery_Total_mAh = buf[off + 9] + 256 * buf[off + 8]; if (battery_Total_mAh == 0) battery_Total_mAh = 1; int nBatPcent = battery_Current_mAh * 100 / battery_Total_mAh; battery_percent = nBatPcent; //Oi Mode off = getPacketOffset(35); OiMode = buf[off + 0]; //ChargeSource off = getPacketOffset(34); ChargeSource = buf[off + 0]; send(msg1_3.set(temp)); delay(100); send(msg1_4.set(battery_percent)); delay(100); send(msg1_2.set(round(voltage / 10), 1)); delay(100); send(msg2_5.set(battery_Current_mAh)); delay(100); send(msg1_1.set(ChargeTypes[chargingState])); delay(100); send(msg2_2.set(ChargeSource)); delay(100); //send(msg2_5.set(chargingState)); // Send info value to gw //send(msg2_5.set("charging state")); // Send info value to gw //send(msg2_5.set(battery_Total_mAh)); // Send info value to gw //send(msg2_1.set(OiTypes[OiMode])); // Send info value to gw lastsensorread = millis(); } else { send(msg1_1.set("roomba is off")); } // Send info value to gw } void defsongs() { uint8_t zero = 0; roomba.write(128); delay(100); roomba.write(131); delay(100); //[128 131](Start the command stream and change roomba mode to "Safe" mode) roomba.write(140); delay(100); roomba.write(zero); delay(100); //[140 0](Start song definition and define the first song, song number 0) roomba.write(25); //[16](16 notes will be sent for song number 0) play('E', 4); //[76 16](play Mi sound for 1 / 4 seconds) // E play('E', 4); play('E', 2); play('E', 4); play('E', 4); play('E', 2); //[76 32](play Mi sound for 1 / 2 seconds) play('E', 4); play('G', 4); play('C', 4); play('D', 4); play('E', 1); play('F', 4); play('F', 4); play('F', 2); play('F', 4); play('E', 4); play('E', 2); play('E', 4); play('D', 4); play('D', 4); play('E', 4); play('D', 1); delay(100); roomba.write(128); } int rnote(char note) { int command = 31; switch (note) { case 'C': command = 72; break; case 'D': command = 74; break; case 'E': command = 76; break; case 'F': command = 77; break; case 'G': command = 79; break; } return command; }// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node #define MY_REPEATER_FEATURE #define CHILD_ID_BATT_TEMP 100 // Id of the 2nd msg1_3 #define CHILD_ID_BATT_PROC 101 // Id of the 2nd msg1_4 #define CHILD_ID_BATT_VOLT 102 // Id of the 2nd msg1_2 #define CHILD_ID_BATT_AH 103 // Id of the 2nd msg2_5 #define CHILD_ID_BATT_CHARGE_TYPE 104 // Id of the 2nd msg1_1 #define CHILD_ID_BATT_CHARGE_SOURCE 105 // Id of the 2nd msg2_2 #include <MySensors.h> #include <SoftwareSerial.h> //#define RELAY_1 5 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) //#define NUMBER_OF_RELAYS 2 // Total number of attached relays //#define RELAY_ON 1 // GPIO value to write to turn on attached relay //#define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define NUMBER_OF_FUNCTION 7 #define NUMBER_OF_SENSORS 6 #define ROOMBA_READ_TIMEOUT 300 #define ROOMBA_WAKE_COUNT 10 int ddPin = 6; int rxPin = 3; int txPin = 4; int ledPin = 13; SoftwareSerial roomba(rxPin, txPin); const char SWITCH_NAMES[NUMBER_OF_FUNCTION][14] = { "Roomba-Stop","Roomba-Dock","Roomba-Clean","Roomba-Spot","Roomba-Max","Roomba-Power","Roomba-Play" }; const char SENSORS_NAMES[NUMBER_OF_SENSORS][24] = { "Roomba-Batt-Temp","Roomba-Batt-Proc","Roomba-Batt-Volt", "Roomba-Batt-mAH" , "Roomba-Batt-CHt" , "Roomba-Batt-CHs" }; uint8_t buf[52]; boolean lowBattery = true; // Acts as a debounce long battery_Current_mAh = 0; long battery_Total_mAh = 0; long battery_percent = 0; boolean DeadBattery = false; boolean FullBattery = true; unsigned long chargingState = 0; long voltage = 0; long temp = 0; long OiMode = 0; long ChargeSource = 0; long sensorfrequency = 300000; // 300000 = 5 min - frequency the sensors are read long lastsensorread = 0; // when were the sensors read the last time unsigned long lastsensorssend = 0; const char ChargeTypes[6][34] = { "Not charging","Reconditioning Charging","Full Charging","Trickle Charging","Waiting","Charging Fault Condition" }; const char OiTypes[4][14] = { "Off","Passive","Safe","Full" }; int packetSizes[58] = { 0,0,0,0,0,0, //1-6 1,1,1,1,1,1,1,1,1,1,1,1, //7-18 2,2, //19-20 1, //21 2,2, //22-23 1, //24 2,2,2,2,2,2,2, //25-31 1, //32 2, //33 1,1,1,1,1, //34-38 2,2,2,2,2,2, //39-44 1, //45 2,2,2,2,2,2, //46-51 1,1, //52-53 2,2,2,2, //54-57 1 //58 }; #define bumpright (sensorbytes[0] & 0x01) #define bumpleft (sensorbytes[0] & 0x02) MyMessage msg1_3(CHILD_ID_BATT_TEMP, V_TEMP); //status of Temperature MyMessage msg1_4(CHILD_ID_BATT_PROC, V_PH); //status of Charge [%] MyMessage msg1_2(CHILD_ID_BATT_VOLT, V_VOLTAGE); //status of Voltage MyMessage msg2_5(CHILD_ID_BATT_AH, V_CURRENT); //status of mAH MyMessage msg1_1(CHILD_ID_BATT_CHARGE_TYPE, V_TEXT); //status of charget type MyMessage msg2_2(CHILD_ID_BATT_CHARGE_SOURCE, V_TEXT); //status of charger source void setup() { pinMode(ddPin, OUTPUT); digitalWrite(ddPin, LOW); Serial.begin(115200); while (!Serial) { ; // wait for serial port to connect. Needed for native USB port only } roomba.begin(115200); //Serial.println("Sending start command..."); //delay(1000); //// set up ROI to receive commands defsongs(); delay(500); rstop(); Serial.println("Ready to go!"); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Roomba", "1.2"); for (int sensor = 0; sensor < NUMBER_OF_FUNCTION; sensor++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY, SWITCH_NAMES[sensor]); delay(100); } present(CHILD_ID_BATT_TEMP, S_TEMP, SENSORS_NAMES[0]); delay(100); present(CHILD_ID_BATT_PROC, S_WATER_QUALITY, SENSORS_NAMES[1]); delay(100); present(CHILD_ID_BATT_VOLT, S_MULTIMETER, SENSORS_NAMES[2]); delay(100); present(CHILD_ID_BATT_AH, S_MULTIMETER, SENSORS_NAMES[3]); delay(100); present(CHILD_ID_BATT_CHARGE_TYPE, S_INFO, SENSORS_NAMES[4]); delay(100); present(CHILD_ID_BATT_CHARGE_SOURCE, S_INFO, SENSORS_NAMES[5]); delay(100); } void loop() { unsigned long now = millis(); if (now > lastsensorssend + sensorfrequency) { readsensors(); lastsensorssend = now; } } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type == V_LIGHT) { int mySensor = message.sensor; int myComand = message.getBool(); //Serial.print(message.sensor-1+RELAY_1); if (mySensor == 0) { if (myComand == 1) { Serial.println("Clean"); //clean(); rcommand(135); } else { Serial.println("Stopp1"); //halt(); rstop(); } } if (mySensor == 1) { if (myComand == 1) { Serial.println("dock"); //dock(); rcommand(143); } else { Serial.println("Stopp2"); //halt(); rstop(); } } if (mySensor == 2) { if (myComand == 1) { Serial.println("song"); //dock(); rcommand(141); rsong(0); } else { Serial.println("Stopp2"); //halt(); rstop(); } } } } void halt() { ; roomba.write(131); // SAFE byte j = 0x00; roomba.write(137); roomba.write(j); roomba.write(j); roomba.write(j); roomba.write(j); } void dock() { delay(1000); roomba.write(143); } void clean() { delay(1000); roomba.write(135); } void rstop() { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(137); delay(100); byte j = 0x00; roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(j); delay(100); roomba.write(128); } } void rsong(int b) { roomba.write(b); delay(100); } void rcommand(int command) { if (rwakeup()) { roomba.write(128); delay(100); roomba.write(131); delay(100); roomba.write(command); } } void play(char note, int rlong) { roomba.write(rnote(note)); delay(10); roomba.write(64 / rlong); delay(10); } bool rwakeup() { bool ret = getSensors(6, buf, 52); Serial.print("wakeup: "); Serial.print(ret); if (!ret) { for (int ii = 1; ii < ROOMBA_WAKE_COUNT; ii++) { for (int jj = 0; jj < 3; jj++) { digitalWrite(ddPin, HIGH); delay(10); digitalWrite(ddPin, LOW); delay(2); } delay(100); roomba.write(128); if (getSensors(6, buf, 52)) { ret = true; break; } Serial.print("-"); } } Serial.println(ret); return ret; } bool getSensors(uint8_t packetID, uint8_t* dest, uint8_t len) { roomba.write(142); delay(100); roomba.write(packetID); delay(100); return getData(dest, len); } bool getData(uint8_t* dest, uint8_t len) { while (len-- > 0) { unsigned long startTime = millis(); while (!roomba.available()) { // Look for a timeout if (millis() > startTime + ROOMBA_READ_TIMEOUT) return false; // Timed out } *dest++ = roomba.read(); } return true; } //for sensorgetting int getPacketSize(int p) { return packetSizes[p - 1]; } int getPacketOffset(int p) { int i = 0; for (int s = 1; s < p; s++) { i += getPacketSize(s); } return i; } //read sensors void readsensors() { if (getSensors(6, buf, 52)) { int off = 0; // Battery Checks off = getPacketOffset(21); chargingState = buf[off + 0]; voltage = buf[off + 2] + 256 * buf[off + 1]; temp = buf[off + 5]; battery_Current_mAh = buf[off + 7] + 256 * buf[off + 6]; battery_Total_mAh = buf[off + 9] + 256 * buf[off + 8]; if (battery_Total_mAh == 0) battery_Total_mAh = 1; int nBatPcent = battery_Current_mAh * 100 / battery_Total_mAh; battery_percent = nBatPcent; //Oi Mode off = getPacketOffset(35); OiMode = buf[off + 0]; //ChargeSource off = getPacketOffset(34); ChargeSource = buf[off + 0]; send(msg1_3.set(temp)); delay(100); send(msg1_4.set(battery_percent)); delay(100); send(msg1_2.set(round(voltage / 10), 1)); delay(100); send(msg2_5.set(battery_Current_mAh)); delay(100); send(msg1_1.set(ChargeTypes[chargingState])); delay(100); send(msg2_2.set(ChargeSource)); delay(100); //send(msg2_5.set(chargingState)); // Send info value to gw //send(msg2_5.set("charging state")); // Send info value to gw //send(msg2_5.set(battery_Total_mAh)); // Send info value to gw //send(msg2_1.set(OiTypes[OiMode])); // Send info value to gw lastsensorread = millis(); } else { send(msg1_1.set("roomba is off")); } // Send info value to gw } void defsongs() { uint8_t zero = 0; roomba.write(128); delay(100); roomba.write(131); delay(100); //[128 131](Start the command stream and change roomba mode to "Safe" mode) roomba.write(140); delay(100); roomba.write(zero); delay(100); //[140 0](Start song definition and define the first song, song number 0) roomba.write(25); //[16](16 notes will be sent for song number 0) play('E', 4); //[76 16](play Mi sound for 1 / 4 seconds) // E play('E', 4); play('E', 2); play('E', 4); play('E', 4); play('E', 2); //[76 32](play Mi sound for 1 / 2 seconds) play('E', 4); play('G', 4); play('C', 4); play('D', 4); play('E', 1); play('F', 4); play('F', 4); play('F', 2); play('F', 4); play('E', 4); play('E', 2); play('E', 4); play('D', 4); play('D', 4); play('E', 4); play('D', 1); delay(100); roomba.write(128); } int rnote(char note) { int command = 31; switch (note) { case 'C': command = 72; break; case 'D': command = 74; break; case 'E': command = 76; break; case 'F': command = 77; break; case 'G': command = 79; break; } return command; }i love this project. i am the owner of a roomba 620 and hooked it up to a arduino-mega. putting "clean()" in the code does what it should and the radiomodules are working fine. but it seems that i dont get values from the sensors and so nothing is showing up in homeassistant... :(
i checked the wiring about 5 times already and since starting for example "clean()" works i think it is a different issue...
did anyone else try this and ran into the same problem?
-
there is plenty of space for a nano or pro mini. wemos mini or nodemcu should also fit
(spam links removed by moderator)

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login