💬 Building a Orange Pi Gateway
-
@giran Hi, how did you connect you NRF module on the Orange PI ?
Is you use the GPIO, you should'nt use TTY stup for MuSensors.Look above my setup in this forum, if you use the GPIO.
Regards.
@SdeWeb Just a minute ago everything worked )) With all steps I described, instead of the 1st one.
I faced with issues when I installed Debian Jessie (https://www.armbian.com/orange-pi-zero/)
but when I tried Ubuntu Xential - everything worked!By using this img time to time my OrangeZero stops to respond. I'll investigate this later.
But for now I'm happy I set up MYS.
Thanks everyone who was trying to help. And I believe someone would find this post useful, with trying another img. -
Support for RFM69 has been added, check the build guide for more information.
-
Hi, everyone
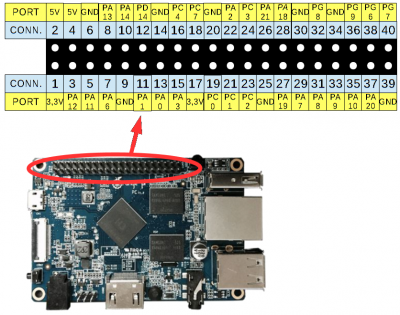
I hope someone can help me, I'm lost trying to wrap my head around the proper pin numbers. I'm using a 433MHz RFM69 connected to an OrangePi PC with this configuration:
OPI PC <-----------> RFM69 17 / 3.3V <-----------> VCC 19 / PC0 <-----------> MOSI 21 / PC1 <-----------> MISO 22 / PA2 <-----------> DI00 23 / PC2 <-----------> SCK 24 / PC3 <-----------> NSS 25 / GND <-----------> GNDPin codes were taken from this picture:
I have the most recent version of the code in the development branch:
fanta@orangepipc:~/MySensors$ git status On branch development Your branch is up-to-date with 'origin/development'. nothing to commit, working directory clean fanta@orangepipc:~/MySensors$ git log --pretty=format:'%h' -n 1 ff0953dAlthough the OrangePi PC apparently does not use spidev0.0 for NAND flash like the Zero, I ended up changing the FEX. This is my current state:
[product] version = "100" machine = "orangepi-pc" [platform] debug_mode = 1 eraseflag = 1 next_work = 2 [target] boot_clock = 1008 storage_type = -1 [key_detect_en] keyen_flag = 0 [fel_key] fel_key_max = 7 fel_key_min = 2 [card_boot] logical_start = 40960 sprite_work_delay = 500 sprite_err_delay = 200 sprite_gpio0 = port:PL10<1><default><default><default> next_work = 3 [box_start_os] used = 1 start_type = 1 irkey_used = 1 pmukey_used = 1 pmukey_num = 3 led_power = 0 led_state = 0 [boot_init_gpio] used = 1 gpio0 = port:PL10<1><default><default><1> gpio1 = port:PG11<1><default><default><1> [recovery_para] used = 1 mode = 2 recovery_key = port:PL04<0><default><default><default> [pm_para] standby_mode = 1 [card0_boot_para] card_ctrl = 0 card_high_speed = 1 card_line = 4 sdc_d1 = port:PF00<2><1><2><default> sdc_d0 = port:PF01<2><1><2><default> sdc_clk = port:PF02<2><1><2><default> sdc_cmd = port:PF03<2><1><2><default> sdc_d3 = port:PF04<2><1><2><default> sdc_d2 = port:PF05<2><1><2><default> [card2_boot_para] card_ctrl = 2 card_high_speed = 1 card_line = 8 sdc_cmd = port:PC06<3><1><2><default> sdc_clk = port:PC05<3><1><2><default> sdc_d0 = port:PC08<3><1><2><default> sdc_d1 = port:PC09<3><1><2><default> sdc_d2 = port:PC10<3><1><2><default> sdc_d3 = port:PC11<3><1><2><default> sdc_d4 = port:PC12<3><1><2><default> sdc_d5 = port:PC13<3><1><2><default> sdc_d6 = port:PC14<3><1><2><default> sdc_d7 = port:PC15<3><1><2><default> sdc_2xmode = 1 sdc_ddrmode = 1 [twi_para] twi_port = 0 twi_scl = port:PA11<2><default><default><default> twi_sda = port:PA12<2><default><default><default> [uart_para] uart_debug_port = 0 uart_debug_tx = port:PA04<2><1><default><default> uart_debug_rx = port:PA05<2><1><default><default> [force_uart_para] force_uart_port = 0 force_uart_tx = port:PF02<3><1><default><default> force_uart_rx = port:PF04<3><1><default><default> [jtag_para] jtag_enable = 0 jtag_ms = port:PA00<3><default><default><default> jtag_ck = port:PA01<3><default><default><default> jtag_do = port:PA02<3><default><default><default> jtag_di = port:PA03<3><default><default><default> [clock] pll_video = 297 pll_ve = 402 pll_periph0 = 600 pll_gpu = 576 pll_periph1 = 600 pll_de = 864 [dram_para] dram_clk = 624 dram_type = 3 dram_zq = 0x3b3bfb dram_odt_en = 1 dram_para1 = 283377664 dram_para2 = 0 dram_mr0 = 6208 dram_mr1 = 64 dram_mr2 = 24 dram_mr3 = 2 dram_tpr0 = 0x48a192 dram_tpr1 = 0x1c2418d dram_tpr2 = 0x76051 dram_tpr3 = 0x0 dram_tpr4 = 0x0 dram_tpr5 = 0x0 dram_tpr6 = 0x64 dram_tpr7 = 0x0 dram_tpr8 = 0x0 dram_tpr9 = 0x0 dram_tpr10 = 0x0 dram_tpr11 = 0x6aaa0000 dram_tpr12 = 0x7979 dram_tpr13 = 0x800800 [wakeup_src_para] cpu_en = 0 cpu_freq = 48 pll_ratio = 273 dram_selfresh_en = 1 dram_freq = 36 wakeup_src0 = wakeup_src_wl = port:PG10<4><default><default><0> wakeup_src_bt = port:PL03<6><default><default><0> [twi0] twi_used = 1 twi_scl = port:PA11<2><default><default><default> twi_sda = port:PA12<2><default><default><default> [twi1] twi_used = 1 twi_scl = port:PA18<3><default><default><default> twi_sda = port:PA19<3><default><default><default> [twi2] twi_used = 0 twi_scl = port:PE12<3><default><default><default> twi_sda = port:PE13<3><default><default><default> [uart0] uart_used = 1 uart_port = 0 uart_type = 2 uart_tx = port:PA04<2><1><default><default> uart_rx = port:PA05<2><1><default><default> [uart1] uart_used = 0 uart_port = 1 uart_type = 4 uart_tx = port:PG06<2><1><default><default> uart_rx = port:PG07<2><1><default><default> uart_rts = port:PG08<2><1><default><default> uart_cts = port:PG09<2><1><default><default> [uart2] uart_used = 0 uart_port = 2 uart_type = 4 uart_tx = port:PA00<2><1><default><default> uart_rx = port:PA01<2><1><default><default> uart_rts = port:PA02<2><1><default><default> uart_cts = port:PA03<2><1><default><default> [uart3] uart_used = 0 uart_port = 3 uart_type = 4 uart_tx = port:PA13<3><1><default><default> uart_rx = port:PA14<3><1><default><default> uart_rts = port:PA15<3><1><default><default> uart_cts = port:PA16<3><1><default><default> [spi0] spi_used = 1 spi_cs_bitmap = 1 spi_mosi = port:PC00<3><default><default><default> spi_miso = port:PC01<3><default><default><default> spi_sclk = port:PC02<3><default><default><default> spi_cs0 = port:PC03<3><1><default><default> [spi1] spi_used = 1 spi_cs_bitmap = 1 spi_cs0 = port:PA13<2><1><default><default> spi_sclk = port:PA14<2><default><default><default> spi_mosi = port:PA15<2><default><default><default> spi_miso = port:PA16<2><default><default><default> [spi_devices] spi_dev_num = 2 [spi_board0] modalias = "spidev" max_speed_hz = 33000000 bus_num = 0 chip_select = 0 mode = 0 full_duplex = 1 manual_cs = 0 [spi_board1] modalias = "spidev" max_speed_hz = 33000000 bus_num = 1 chip_select = 0 mode = 0 full_duplex = 1 manual_cs = 0 [gpio_para] gpio_used = 1 gpio_num = 20 gpio_pin_1 = port:PA06<1><default><default><0> gpio_pin_2 = port:PA13<1><default><default><0> gpio_pin_3 = port:PA14<1><default><default><0> gpio_pin_4 = port:PA01<1><default><default><0> gpio_pin_5 = port:PD14<1><default><default><0> gpio_pin_6 = port:PA00<1><default><default><0> gpio_pin_7 = port:PA03<1><default><default><0> gpio_pin_8 = port:PC04<1><default><default><0> gpio_pin_9 = port:PC07<1><default><default><0> gpio_pin_10 = port:PA02<1><default><default><0> gpio_pin_11 = port:PA21<1><default><default><0> gpio_pin_12 = port:PA07<1><default><default><0> gpio_pin_13 = port:PA08<1><default><default><0> gpio_pin_14 = port:PG08<1><default><default><0> gpio_pin_15 = port:PA09<1><default><default><0> gpio_pin_16 = port:PA10<1><default><default><0> gpio_pin_17 = port:PG09<1><default><default><0> gpio_pin_18 = port:PG06<1><default><default><0> gpio_pin_19 = port:PG07<1><default><default><0> gpio_pin_20 = port:PC03<1><default><default><0> [leds_para] leds_used = 1 green_led = port:PL10<1><default><default><1> green_led_active_low = 0 red_led = port:PA15<1><default><default><0> red_led_active_low = 0 [ths_para] ths_used = 1 ths_trip1_count = 6 ths_trip1_0 = 75 ths_trip1_1 = 80 ths_trip1_2 = 85 ths_trip1_3 = 90 ths_trip1_4 = 95 ths_trip1_5 = 105 ths_trip1_6 = 0 ths_trip1_7 = 0 ths_trip1_0_min = 0 ths_trip1_0_max = 1 ths_trip1_1_min = 1 ths_trip1_1_max = 2 ths_trip1_2_min = 2 ths_trip1_2_max = 3 ths_trip1_3_min = 3 ths_trip1_3_max = 4 ths_trip1_4_min = 4 ths_trip1_4_max = 8 ths_trip1_5_min = 8 ths_trip1_5_max = 8 ths_trip1_6_min = 0 ths_trip1_6_max = 0 ths_trip2_count = 1 ths_trip2_0 = 105 [cooler_table] cooler_count = 9 cooler0 = "1296000 4 4294967295 0" cooler1 = "1200000 4 4294967295 0" cooler2 = "1008000 4 4294967295 0" cooler3 = "816000 4 4294967295 0" cooler4 = "648000 4 4294967295 0" cooler5 = "480000 4 4294967295 0" cooler6 = "480000 3 4294967295 0" cooler7 = "480000 2 4294967295 0" cooler8 = "480000 1 4294967295 0" [nand0_para] nand_support_2ch = 0 nand0_used = 0 nand0_we = port:PC00<2><default><default><default> nand0_ale = port:PC01<2><default><default><default> nand0_cle = port:PC02<2><default><default><default> nand0_ce1 = port:PC03<2><default><default><default> nand0_ce0 = port:PC04<2><default><default><default> nand0_nre = port:PC05<2><default><default><default> nand0_rb0 = port:PC06<2><default><default><default> nand0_rb1 = port:PC07<2><default><default><default> nand0_d0 = port:PC08<2><default><default><default> nand0_d1 = port:PC09<2><default><default><default> nand0_d2 = port:PC10<2><default><default><default> nand0_d3 = port:PC11<2><default><default><default> nand0_d4 = port:PC12<2><default><default><default> nand0_d5 = port:PC13<2><default><default><default> nand0_d6 = port:PC14<2><default><default><default> nand0_d7 = port:PC15<2><default><default><default> nand0_ndqs = port:PC16<2><default><default><default> [boot_disp] advert_disp = 0 auto_hpd = 1 output_type = 4 hdmi_channel = 0 hdmi_mode = 4 cvbs_channel = 1 cvbs_mode = 11 output_full = 1 hdmi_mode_check = 1 [disp_init] disp_init_enable = 1 disp_mode = 0 screen0_output_type = 3 screen0_output_mode = 5 screen1_output_type = 3 screen1_output_mode = 5 fb0_format = 0 fb0_width = 0 fb0_height = 0 fb1_format = 0 fb1_width = 0 fb1_height = 0 [hdmi_para] hdmi_used = 1 hdmi_power = "vcc-hdmi-18" [tv_para] tv_used = 0 tv_dac_used = 1 tv_dac_src0 = 0 [pwm0_para] pwm_used = 0 pwm_positive = port:PA05<3><0><default><default> [gmac0] gmac_used = 2 gmac_power1 = [csi0] vip_used = 1 vip_mode = 0 vip_dev_qty = 1 vip_define_sensor_list = 0 vip_csi_pck = port:PE00<2><default><default><default> vip_csi_mck = port:PE01<2><default><default><default> vip_csi_hsync = port:PE02<2><default><default><default> vip_csi_vsync = port:PE03<2><default><default><default> vip_csi_d0 = port:PE04<2><default><default><default> vip_csi_d1 = port:PE05<2><default><default><default> vip_csi_d2 = port:PE06<2><default><default><default> vip_csi_d3 = port:PE07<2><default><default><default> vip_csi_d4 = port:PE08<2><default><default><default> vip_csi_d5 = port:PE09<2><default><default><default> vip_csi_d6 = port:PE10<2><default><default><default> vip_csi_d7 = port:PE11<2><default><default><default> vip_csi_sck = port:PE12<2><default><default><default> vip_csi_sda = port:PE13<2><default><default><default> vip_dev0_mname = "gc2035" vip_dev0_pos = "front" vip_dev0_lane = 1 vip_dev0_twi_id = 2 vip_dev0_twi_addr = 120 vip_dev0_isp_used = 0 vip_dev0_fmt = 0 vip_dev0_stby_mode = 0 vip_dev0_vflip = 1 vip_dev0_hflip = 1 vip_dev0_iovdd = "" vip_dev0_iovdd_vol = 2800000 vip_dev0_avdd = "" vip_dev0_avdd_vol = 2800000 vip_dev0_dvdd = "" vip_dev0_dvdd_vol = 1800000 vip_dev0_afvdd = "" vip_dev0_afvdd_vol = 2800000 vip_dev0_power_en = port:PA17<1><default><default><1> vip_dev0_reset = port:PE14<1><default><default><1> vip_dev0_pwdn = port:PE15<1><default><default><0> vip_dev0_flash_en = vip_dev0_flash_mode = vip_dev0_af_pwdn = vip_dev0_act_used = 0 vip_dev0_act_name = "ad5820_act" vip_dev0_act_slave = 24 vip_dev1_mname = "" vip_dev1_pos = "rear" vip_dev1_lane = 1 vip_dev1_twi_id = 0 vip_dev1_twi_addr = vip_dev1_isp_used = 0 vip_dev1_fmt = 1 vip_dev1_stby_mode = 0 vip_dev1_vflip = 0 vip_dev1_hflip = 0 vip_dev1_iovdd = "" vip_dev1_iovdd_vol = 2800000 vip_dev1_avdd = "" vip_dev1_avdd_vol = 2800000 vip_dev1_dvdd = "" vip_dev1_dvdd_vol = 1500000 vip_dev1_afvdd = "" vip_dev1_afvdd_vol = 2800000 vip_dev1_power_en = vip_dev1_reset = vip_dev1_pwdn = vip_dev1_flash_en = vip_dev1_flash_mode = vip_dev1_af_pwdn = [tvout_para] tvout_used = tvout_channel_num = tv_en = [tvin_para] tvin_used = tvin_channel_num = [di_para] di_used = 1 [mmc0_para] sdc_used = 1 sdc_detmode = 3 sdc_buswidth = 4 sdc_clk = port:PF02<2><1><2><default> sdc_cmd = port:PF03<2><1><2><default> sdc_d0 = port:PF01<2><1><2><default> sdc_d1 = port:PF00<2><1><2><default> sdc_d2 = port:PF05<2><1><2><default> sdc_d3 = port:PF04<2><1><2><default> sdc_det = port:PF06<0><1><2><default> sdc_use_wp = 0 sdc_wp = sdc_isio = 0 sdc_regulator = "none" sdc_power_supply = "none" [mmc1_para] sdc_used = 1 sdc_detmode = 4 sdc_buswidth = 4 sdc_clk = port:PG00<2><1><3><default> sdc_cmd = port:PG01<2><1><3><default> sdc_d0 = port:PG02<2><1><3><default> sdc_d1 = port:PG03<2><1><3><default> sdc_d2 = port:PG04<2><1><3><default> sdc_d3 = port:PG05<2><1><3><default> sdc_det = sdc_use_wp = 0 sdc_wp = sdc_isio = 1 sdc_regulator = "none" sdc_power_supply = "none" sdc_2xmode = 1 sdc_ddrmode = 1 [mmc2_para] sdc_used = 0 sdc_detmode = 3 sdc_buswidth = 8 sdc_clk = port:PC05<3><1><2><default> sdc_cmd = port:PC06<3><1><2><default> sdc_d0 = port:PC08<3><1><2><default> sdc_d1 = port:PC09<3><1><2><default> sdc_d2 = port:PC10<3><1><2><default> sdc_d3 = port:PC11<3><1><2><default> sdc_d4 = port:PC12<3><1><2><default> sdc_d5 = port:PC13<3><1><2><default> sdc_d6 = port:PC14<3><1><2><default> sdc_d7 = port:PC15<3><1><2><default> emmc_rst = port:PC16<3><1><2><default> sdc_det = sdc_use_wp = 0 sdc_wp = sdc_isio = 0 sdc_regulator = "none" sdc_power_supply = "none" sdc_2xmode = 1 sdc_ddrmode = 1 [smc_para] smc_used = 0 smc_rst = port:PA09<2><default><default><default> smc_vppen = port:PA20<3><default><default><default> smc_vppp = port:PA21<3><default><default><default> smc_det = port:PA10<2><default><default><default> smc_vccen = port:PA06<2><default><default><default> smc_sck = port:PA07<2><default><default><default> smc_sda = port:PA08<2><default><default><default> [usbc0] usb_used = 1 usb_port_type = 2 usb_detect_type = 0 usb_id_gpio = port:PG12<0><1><default><default> usb_det_vbus_gpio = port:PG12<0><1><default><default> usb_drv_vbus_gpio = port:PL02<1><0><default><0> usb_host_init_state = 1 usb_restrict_gpio = usb_restric_flag = 0 usb_restric_voltage = 3550000 usb_restric_capacity = 5 usb_regulator_io = "nocare" usb_regulator_vol = 0 usb_not_suspend = 0 [usbc1] usb_used = 1 usb_drv_vbus_gpio = usb_restrict_gpio = usb_host_init_state = 1 usb_restric_flag = 0 usb_regulator_io = "nocare" usb_regulator_vol = 0 usb_not_suspend = 0 [usbc2] usb_used = 1 usb_drv_vbus_gpio = usb_restrict_gpio = usb_host_init_state = 1 usb_restric_flag = 0 usb_regulator_io = "nocare" usb_regulator_vol = 0 usb_not_suspend = 0 [usbc3] usb_used = 1 usb_drv_vbus_gpio = usb_restrict_gpio = usb_host_init_state = 1 usb_restric_flag = 0 usb_regulator_io = "nocare" usb_regulator_vol = 0 usb_not_suspend = 0 [usb_feature] vendor_id = 6353 mass_storage_id = 1 adb_id = 2 manufacturer_name = "USB Developer" product_name = "Android" serial_number = "20080411" [msc_feature] vendor_name = "USB 2.0" product_name = "USB Flash Driver" release = 100 luns = 3 [serial_feature] serial_unique = 0 [module_para] module_num = 7 module_power0 = "vcc-wifi-33" module_power0_vol = 0 module_power1 = module_power1_vol = module_power2 = module_power2_vol = module_power3 = module_power3_vol = chip_en = lpo_use_apclk = [wifi_para] wifi_used = 0 wifi_sdc_id = 1 wifi_usbc_id = 5 wifi_usbc_type = 1 wl_reg_on = port:PL07<1><default><default><0> wl_host_wake = port:PG10<0><default><default><0> wl_host_wake_invert = 0 [bt_para] bt_used = 0 bt_uart_id = 1 bt_rst_n = bt_wake = bt_host_wake = bt_host_wake_invert = 0 [pcm0] daudio_used = 0 daudio_master = 4 daudio_select = 1 audio_format = 1 signal_inversion = 1 mclk_fs = 128 sample_resolution = 16 slot_width_select = 32 pcm_lrck_period = 32 pcm_lrckr_period = 1 msb_lsb_first = 0 sign_extend = 0 slot_index = 0 slot_width = 32 frame_width = 0 tx_data_mode = 0 rx_data_mode = 0 i2s_mclk = port:PA18<2><1><default><default> i2s_bclk = port:PA19<2><1><default><default> i2s_dout0 = port:PA20<2><1><default><default> i2s_din = port:PA21<2><1><default><default> [pcm1] daudio_used = 0 daudio_master = 4 daudio_select = 1 audio_format = 1 signal_inversion = 1 mclk_fs = 128 sample_resolution = 16 slot_width_select = 32 pcm_lrck_period = 32 pcm_lrckr_period = 1 msb_lsb_first = 0 sign_extend = 0 slot_index = 0 slot_width = 32 frame_width = 0 tx_data_mode = 0 rx_data_mode = 0 i2s_mclk = port:PG10<2><1><default><default> i2s_bclk = port:PG11<2><1><default><default> i2s_dout0 = port:PG12<2><1><default><default> i2s_din = port:PG13<2><1><default><default> [audio0] audio_used = 1 lineout_vol = 31 cap_vol = 5 audio_hp_ldo = "none" adcagc_used = 0 adcdrc_used = 0 dacdrc_used = 0 adchpf_used = 0 dachpf_used = 0 audio_pa_ctrl = port:PA16<1><default><default><0> [spdif0] spdif_used = 0 spdif_dout = port:PA17<2><1><default><default> [audiohub] hub_used = 0 codec_used = 1 spdif_used = 1 hdmi_used = 1 [s_cir0] ir_used = 1 ir_rx = port:PL11<2><1><default><default> ir_power_key_code0 = 87 ir_addr_code0 = 40704 ir_power_key_code1 = 26 ir_addr_code1 = 64260 ir_power_key_code2 = 20 ir_addr_code2 = 32640 ir_power_key_code3 = 21 ir_addr_code3 = 32640 ir_power_key_code4 = 11 ir_addr_code4 = 63240 ir_power_key_code5 = 3 ir_addr_code5 = 239 ir_power_key_code6 = 159 ir_addr_code6 = 19635 ir_power_key_code7 = 10 ir_addr_code7 = 30536 ir_power_key_code8 = 69 ir_addr_code8 = 48386 ir_power_key_code9 = 77 ir_addr_code9 = 56865 ir_power_key_code10 = 24 ir_addr_code10 = 65025 ir_power_key_code11 = 87 ir_addr_code11 = 65280 ir_power_key_code12 = 77 ir_addr_code12 = 65344 [cir] ir_used = 1 ir_tx = port:PH07<2><default><default><default> [dvfs_table] pmuic_type = 2 pmu_gpio0 = port:PL06<1><1><2><1> pmu_level0 = 11300 pmu_level1 = 1100 extremity_freq = 1296000000 max_freq = 1200000000 min_freq = 480000000 LV_count = 7 LV1_freq = 1296000000 LV1_volt = 1320 LV2_freq = 1200000000 LV2_volt = 1240 LV3_freq = 1104000000 LV3_volt = 1180 LV4_freq = 1008000000 LV4_volt = 1140 LV5_freq = 960000000 LV5_volt = 1080 LV6_freq = 816000000 LV6_volt = 1020 LV7_freq = 480000000 LV7_volt = 980 [gpu_dvfs_table] G_LV_count = 3 G_LV0_freq = 312000000 G_LV0_volt = 1200000 G_LV1_freq = 384000000 G_LV1_volt = 1200000 G_LV2_freq = 456000000 G_LV2_volt = 1200000 [Vdevice] Vdevice_used = 0 Vdevice_0 = port:PH10<5><1><2><default> Vdevice_1 = port:PH11<5><1><2><default> [s_uart0] s_uart_used = 0 s_uart_tx = port:PL02<2><default><default><default> s_uart_rx = port:PL03<2><default><default><default> [s_rsb0] s_rsb_used = 1 s_rsb_sck = port:PL00<2><1><2><default> s_rsb_sda = port:PL01<2><1><2><default> [s_jtag0] s_jtag_used = 0 s_jtag_tms = port:PL04<2><1><2><default> s_jtag_tck = port:PL05<2><1><2><default> s_jtag_tdo = port:PL06<2><1><2><default> s_jtag_tdi = port:PL07<2><1><2><default> [s_powchk] s_powchk_used = -2147483648 s_power_reg = 0 s_system_power = 50 [sim0] scr_used = 0 scr_vccen = port:PA06<2><default><default><default> scr_slk = port:PA07<2><default><default><default> scr_sda = port:PA08<2><default><default><default> scr_rst = port:PA09<2><default><default><default> scr_det = port:PA10<2><default><default><default> [ts0] tsc_used = 0 tsc_clk = port:PE00<3><default><default><default> tsc_err = port:PE01<3><default><default><default> tsc_sync = port:PE02<3><default><default><default> tsc_dvld = port:PE03<3><default><default><default> tsc_d0 = port:PE04<3><default><default><default> tsc_d1 = port:PE05<3><default><default><default> tsc_d2 = port:PE06<3><default><default><default> tsc_d3 = port:PE07<3><default><default><default> tsc_d4 = port:PE08<3><default><default><default> tsc_d5 = port:PE09<3><default><default><default> tsc_d6 = port:PE10<3><default><default><default> tsc_d7 = port:PE11<3><default><default><default> [gpio_power_key] key_used = 1 key_io = port:PL03<6><default><default><0> [key_para] key_used = 0 key_cnt = 5 key1_vol = 222 key2_vol = 444 key3_vol = 666 key4_vol = 857 key5_vol = 2000 [d7s_para] d7s_used = 0 din_gpio = port:PD00<1><default><default><1> clk_gpio = port:PD01<1><default><default><1> stb_gpio = port:PD02<1><default><default><1> [mali_para] mali_used = 1 mali_clkdiv = 1 mali_extreme_freq = 600 mali_extreme_vol = 1400 [w1_para] w1_used = 1 gpio = 20 [corekeeper] corekeeper_enabled = 1Note that I added a line to the gpio section in one of my attempts to make this work, in order to map PA2 to GPIO20 (or at least that was what I was trying to accomplish).
I'm trying to compile an MQTT gateway, so my configure line is:
./configure --spi-spidev-device=/dev/spidev0.0 --my-rfm69-irq-pin=10 --my-rfm69-cs-pin=20 --my-transport=rfm69 --my-rfm69-frequency=433 --my-gateway=mqtt --my-controller-ip-address=127.0.0.1 --my-mqtt-publish-topic-prefix=mysensors-out --my-mqtt-subscribe-topic-prefix=mysensors-in --my-mqtt-client-id=mygateway1 --extra-cxxflags="-DMY_DEBUG_VERBOSE_RFM69"And here is the core of my problem - which values to use for IRQ pin and CS pin. If I use 10 for IRQ. I compile with no problems, but when I run
sudo bin/mysgw -dI get:
fanta@orangepipc:~/MySensors$ sudo bin/mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RPNG----,VER=2.2.0-beta mysgw: TSF:LRT:OK mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: RFM69:INIT mysgw: RFM69:INIT:PIN,CS=20,IQP=10,IQN=2 mysgw: RFM69:PTX:LEVEL=5 dBm mysgw: Could not open /sys/class/gpio/gpio10/directionI have already tried enabling GPIO10:
fanta@orangepipc:~/MySensors$ echo "10" |sudo tee /sys/class/gpio/export 10 tee: /sys/class/gpio/export: Device or resource busyMy gpio readall outputs this:
fanta@orangepipc:~/MySensors$ gpio readall +-----+-----+----------+------+---+-Orange Pi+---+---+------+---------+-----+--+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | | | 3.3v | | | 1 || 2 | | | 5v | | | | 12 | 8 | SDA.0 | ALT5 | 0 | 3 || 4 | | | 5V | | | | 11 | 9 | SCL.0 | ALT5 | 0 | 5 || 6 | | | 0v | | | | 6 | 7 | GPIO.7 | OUT | 0 | 7 || 8 | 0 | OUT | TxD3 | 15 | 13 | | | | 0v | | | 9 || 10 | 0 | OUT | RxD3 | 16 | 14 | | 1 | 0 | RxD2 | OUT | 0 | 11 || 12 | 0 | OUT | GPIO.1 | 1 | 110 | | 0 | 2 | TxD2 | OUT | 0 | 13 || 14 | | | 0v | | | | 3 | 3 | CTS2 | OUT | 0 | 15 || 16 | 0 | OUT | GPIO.4 | 4 | 68 | | | | 3.3v | | | 17 || 18 | 0 | OUT | GPIO.5 | 5 | 71 | | 64 | 12 | MOSI | ALT4 | 0 | 19 || 20 | | | 0v | | | | 65 | 13 | MISO | ALT4 | 0 | 21 || 22 | 0 | OUT | RTS2 | 6 | 2 | | 66 | 14 | SCLK | ALT4 | 0 | 23 || 24 | 0 | OUT | CE0 | 10 | 67 | | | | 0v | | | 25 || 26 | 0 | OUT | GPIO.11 | 11 | 21 | | 19 | 30 | SDA.1 | ALT4 | 0 | 27 || 28 | 0 | ALT4 | SCL.1 | 31 | 18 | | 7 | 21 | GPIO.21 | OUT | 0 | 29 || 30 | | | 0v | | | | 8 | 22 | GPIO.22 | OUT | 0 | 31 || 32 | 0 | OUT | RTS1 | 26 | 200 | | 9 | 23 | GPIO.23 | OUT | 0 | 33 || 34 | | | 0v | | | | 10 | 24 | GPIO.24 | OUT | 0 | 35 || 36 | 0 | OUT | CTS1 | 27 | 201 | | 20 | 25 | GPIO.25 | OUT | 1 | 37 || 38 | 0 | OUT | TxD1 | 28 | 198 | | | | 0v | | | 39 || 40 | 0 | OUT | RxD1 | 29 | 199 | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+-Orange Pi+---+------+----------+-----+-----+So I tried --my-rfm69-irq-pin=2 --my-rfm69-cs-pin=67 as well, but I run into the same problem with pin 2.
Can anyone help me find out which pin numbers to use?
Thanks in advance!
-
@awilner I am in a hurry right now so I cannot go through what you wrote in detail, but maybe my post about pin numbering can help you: https://forum.mysensors.org/post/58309 It is related to an OPi Plus2e using nrf24 but the numbering formulas should still be valid.
Good luck!
Orange Pi Plus 2e connected to nrf24 PA via SPI running git-development MySensors gateway, OpenHAB2, mosquitto and MySQL persistence.
-
@awilner I am in a hurry right now so I cannot go through what you wrote in detail, but maybe my post about pin numbering can help you: https://forum.mysensors.org/post/58309 It is related to an OPi Plus2e using nrf24 but the numbering formulas should still be valid.
Good luck!
-
I wanted to build MQTT client gateway with whitelisting and encryption + 3 LEDs with Arduino UNO and Ethernet shield but it does not have enough memory.
Before going to Arduino MEGA I found this and I think this will be a better way to do it. Smaller, cheaper..just not sure if it has all the options. Can someone confirm? Whitelisting will be easier then reflashing Arduino all the time too.
I plan to use Orange Pi Zero H2+ Quad Core 256MB
-
If your conditions are
- 3 LEDs: yes through GPIO
- Ethernet: yes (d'uh)
- beefy enough for software encryption: I guess? For an IoT-low data rate scenario for sure
I'm running armbian on my Orange Pi and setting up mosquitto is a breeze. But you don't need a broker right? Don't forget you need an SD card on top and more power.
-
Thanks, I already have a broker and OpenHAB. Want this gateway to act as a client....maybe it will even support SSL MQTT. And encryption with
#define MY_RF24_ENABLE_ENCRYPTION is wanted.
In the article, there is no list of all available configurations...yea adding SD card does not make it cheaper
-
i'm sorry, i do not have experience with encryption. essentially it depends on the code you want to write, since on the pi you are kind of limited to scripting, whereas microcontroller code is closer to hardware. also, if you need things like an adc or spi you're better of with a microcontroller. if it's just about some LEDs lighting up..
-
Thanks, I already have a broker and OpenHAB. Want this gateway to act as a client....maybe it will even support SSL MQTT. And encryption with
#define MY_RF24_ENABLE_ENCRYPTION is wanted.
In the article, there is no list of all available configurations...yea adding SD card does not make it cheaper
@8667 said in 💬 Building a Orange Pi Gateway:
In the article, there is no list of all available configurations..
From the article:
For a complete list of configuration parameters, run:
./configure --help
Did you miss this or is there something I'm not understanding?
-
mysgw: Could not open /sys/class/gpio/gpio10/direction
Please help me to solve this error -
mysgw: Could not open /sys/class/gpio/gpio10/direction
Please help me to solve this error -
@mfalkvidd
When I executed sudo ./bin/mysgw -d this command after that i'm facing error like :mysgw: Starting gateway...
mysgw: Protocol version - 2.2.0-beta
mysgw: MCO:BGN:INIT GW,CP=RNNG----,VER=2.2.0-beta
mysgw: TSF:LRT:OK
mysgw: TSM:INIT
mysgw: TSF:WUR:MS=0
mysgw: Could not open /sys/class/gpio/gpio24/direction
I followed all the steps provide in the site but still I am getting error. -
@mfalkvidd
When I executed sudo ./bin/mysgw -d this command after that i'm facing error like :mysgw: Starting gateway...
mysgw: Protocol version - 2.2.0-beta
mysgw: MCO:BGN:INIT GW,CP=RNNG----,VER=2.2.0-beta
mysgw: TSF:LRT:OK
mysgw: TSM:INIT
mysgw: TSF:WUR:MS=0
mysgw: Could not open /sys/class/gpio/gpio24/direction
I followed all the steps provide in the site but still I am getting error.@BAsavaraj004 thanks. Earlier posts indicate that the "Could not open" error could be caused by a problem with the pin mapping. I don't have an OrangePi myself so I don't know the details but maybe these posts can help:
https://forum.mysensors.org/post/69656
https://forum.mysensors.org/post/60943
https://forum.mysensors.org/post/56374 -
Hi,
Well done finally i used the dedicated .fex file for Orange Pi Plus 2E here :
https://linux-sunxi.org/Xunlong_Orange_Pi_Plus_2E#Expansion_Portat this point :
https://github.com/igorpecovnik/lib/blob/master/config/fex/orangepiplus2e.fexRead the .fex file in a text editor, u'll see important things about "gpio_config" for H3 cpu :
; NOTE: This section is necessary only for "gpio_sunxi" driver ; which is obsolete for H3 boards [gpio_para] gpio_used = 0 gpio_num = 0I connected my NRF24L01 on OPI P2E like this :
NRF24L01 Port Name / (Pin N°) ----- OPI Port (Pin N°) / Name GND (1) <-----------> (20) / GND VCC (2) <-----------> (17) / 3.3V PWR CE (3) <-----------> (22) / (PA2 / GPIO2) CSN (4) <-----------> (24) / (PC3 / GPIO67) SCK (5) <-----------> (23) MOSI (6) <-----------> (19) MOSI MISO (7) <-----------> (21) MISO IRQ (8) <-----------> NCSo "MySensors" setup is :
./configure --spi-spidev-device=/dev/spidev0.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=67Then
./bin/mysgw -dReturn :
root@orangepiplus2e:~/MySensors# ./bin/mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: Listening for connections on 0.0.0.0:5003 mysgw: MCO:BGN:STP mysgw: MCO:BGN:INIT OK,TSP=1Best.
Seb.@SdeWeb said in 💬 Building a Orange Pi Gateway:
Hi,
Well done finally i used the dedicated .fex file for Orange Pi Plus 2E here :
https://linux-sunxi.org/Xunlong_Orange_Pi_Plus_2E#Expansion_Portat this point :
https://github.com/igorpecovnik/lib/blob/master/config/fex/orangepiplus2e.fexRead the .fex file in a text editor, u'll see important things about "gpio_config" for H3 cpu :
; NOTE: This section is necessary only for "gpio_sunxi" driver ; which is obsolete for H3 boards [gpio_para] gpio_used = 0 gpio_num = 0I connected my NRF24L01 on OPI P2E like this :
NRF24L01 Port Name / (Pin N°) ----- OPI Port (Pin N°) / Name GND (1) <-----------> (20) / GND VCC (2) <-----------> (17) / 3.3V PWR CE (3) <-----------> (22) / (PA2 / GPIO2) CSN (4) <-----------> (24) / (PC3 / GPIO67) SCK (5) <-----------> (23) MOSI (6) <-----------> (19) MOSI MISO (7) <-----------> (21) MISO IRQ (8) <-----------> NCSo "MySensors" setup is :
./configure --spi-spidev-device=/dev/spidev0.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=67Then
./bin/mysgw -dReturn :
root@orangepiplus2e:~/MySensors# ./bin/mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: Listening for connections on 0.0.0.0:5003 mysgw: MCO:BGN:STP mysgw: MCO:BGN:INIT OK,TSP=1Best.
Seb.This worked great on my Orange Pi Lite.
I was trying to follow the tutorial at Building a Orange Pi Gateway and I tried all sorts of things that didn't work.
IMO the main tutorial should have this as instruction to building a gateway with Orange Pi Lite/Plus.
Thanks!!
( Sorry for quoting the entire original post, but this will help anyone searching for help with their Orange Pi Lite) -
I got the OrangeZero and was building the configuration command... can someone provide me more detailed instructions about using higher security?
- Is it possible to use SSL for the connecting to the broker?
- How whitelisting works with Pi? I moved away of Arduino as I do not want to recompile it everytime I need to include new node. So far I have
-my-signing-request-signatures --my-signing-debug --my-signing=password --my-signing-password=SOMETHING --my-rf24-encryption-enabledbut this will not allow me to exclude stolen nodes right?
-
I got the OrangeZero and was building the configuration command... can someone provide me more detailed instructions about using higher security?
- Is it possible to use SSL for the connecting to the broker?
- How whitelisting works with Pi? I moved away of Arduino as I do not want to recompile it everytime I need to include new node. So far I have
-my-signing-request-signatures --my-signing-debug --my-signing=password --my-signing-password=SOMETHING --my-rf24-encryption-enabledbut this will not allow me to exclude stolen nodes right?
@8667 no, it won't. As it is for the moment, whitelisting works no different compared to Arduino based devices. You will have to recompile your GW if you add new nodes as you will need to add their serials to the whitelist in the GW.
-
@8667 no, it won't. As it is for the moment, whitelisting works no different compared to Arduino based devices. You will have to recompile your GW if you add new nodes as you will need to add their serials to the whitelist in the GW.
@Anticimex said in 💬 Building a Orange Pi Gateway:
@8667 no, it won't. As it is for the moment, whitelisting works no different compared to Arduino based devices. You will have to recompile your GW if you add new nodes as you will need to add their serials to the whitelist in the GW.
So how personalization works on the orange and how to pass the list of serials?
-
@Anticimex said in 💬 Building a Orange Pi Gateway:
@8667 no, it won't. As it is for the moment, whitelisting works no different compared to Arduino based devices. You will have to recompile your GW if you add new nodes as you will need to add their serials to the whitelist in the GW.
So how personalization works on the orange and how to pass the list of serials?
-
This should be in the wiki
root@pi0:~/MySensors# ./configure --help configure script for MySensors gateway. Options: Help: -h, --help print this message SPI driver options: --spi-driver=[BCM|SPIDEV] --spi-spidev-device=<DEVICE> Device path. [/dev/spidev0.0] Building options: --soc=[BCM2835|BCM2836|BCM2837|AM33XX|A10|A13|A20|H3] SoC type to be used. [configure autodetected] --cpu-flags=<CPUFLAGS> CPU defining/optimizing flags to be used. [configure autodetected] --extra-cflags=<CFLAGS> Extra C flags passed to C compilation. [] --extra-cxxflags=<CXXFLAGS> Extra C++ flags passed to C++ compilation. [] --extra-ldflags=<LDFLAGS> Extra C flags passed to linking. [] --c_compiler=<CC> C compiler. [arm-linux-gnueabihf-gcc][gcc] --cxx_compiler=<CXX> C++ compiler. [arm-linux-gnueabihf-g++][g++] --build-dir=<DIR> Compiler directory to store object files. [build] --bin-dir=<DIR> Compiler directory to store binary files. [bin] --arduino-lib-dir=<DIR> Arduino library directory. --no-clean Don't clean previous build artifacts. Installation options: --prefix=<PREFIX> Installation prefix path. [/usr/local] --gateway-dir=<DIR> Gateway files installation directory. [PREFIX/bin] MySensors options: --my-debug=[enable|disable] Enables or disables MySensors core debugging. [enable] --my-config-file=<FILE> Config file path. [/etc/mysensors.dat] --my-gateway=[none|ethernet|serial|mqtt] Set the protocol used to communicate with the controller. [ethernet] --my-node-id=<ID> Disable gateway feature and run as a node with the specified id. --my-controller-url-address=<URL> Controller or MQTT broker url. --my-controller-ip-address=<IP> Controller or MQTT broker ip. --my-port=<PORT> The port to keep open on gateway mode. If gateway is set to mqtt, it sets the broker port. --my-serial-port=<PORT> Serial port. [/dev/ttyACM0] --my-serial-baudrate=<BAUD> Serial baud rate. [115200] --my-serial-is-pty Set the serial port to be a pseudo terminal. Use this if you want to connect to a controller running on the same device. --my-serial-pty=<NAME> Symlink name for the PTY device. [/dev/ttyMySensorsGateway] --my-serial-groupname=<GROUP> Grant access to the specified system group for the serial device. --my-mqtt-client-id=<ID> MQTT client id. --my-mqtt-user=<UID> MQTT user id. --my-mqtt-password=<PASS> MQTT password. --my-mqtt-publish-topic-prefix=<PREFIX> MQTT publish topic prefix. --my-mqtt-subscribe-topic-prefix=<PREFIX> MQTT subscribe topic prefix. --my-transport=[none|nrf24|rs485|rfm95|rfm69] Set the transport to be used to communicate with other nodes. [nrf24] --my-rf24-channel=<0-125> RF channel for the sensor net. [76] --my-rf24-pa-level=[RF24_PA_MAX|RF24_PA_LOW] RF24 PA level. [RF24_PA_MAX] --my-rf24-ce-pin=<PIN> Pin number to use for rf24 Chip-Enable. --my-rf24-cs-pin=<PIN> Pin number to use for rf24 Chip-Select. --my-rf24-irq-pin=<PIN> Pin number connected to nRF24L01 IRQ pin. --my-rf24-encryption-enabled Enables RF24 encryption. All nodes and gateway must have this enabled, and all must be personalized with the same AES key --my-rx-message-buffer-size=<SIZE> Buffer size for incoming messages when using rf24 interrupts. [20] --my-rfm69-frequency=[315|433|868|915] RFM69 Module Frequency. [868] --my-is-rfm69hw Enable high-powered rfm69hw. --my-rfm69-irq-pin=<PIN> Pin number connected to RFM69 IRQ pin. --my-rfm69-cs-pin=<PIN> Pin number to use for RFM69 Chip-Select. --my-rs485-serial-port=<PORT> RS485 serial port. You must provide a port. --my-rs485-baudrate=<BAUD> RS485 baudrate. [9600] --my-rs485-de-pin=<PIN> Pin number connected to RS485 driver enable pin. --my-rs485-max-msg-length=<LENGTH> The maximum message length used for RS485. [40] --my-leds-err-pin=<PIN> Error LED pin. --my-leds-rx-pin=<PIN> Receive LED pin. --my-leds-tx-pin=<PIN> Transmit LED pin. --my-leds-blinking-inverse Inverse the blinking feature. --my-signing=[none|software|password] Message signing. [none] --my-signing-debug Enable signing related debug. --my-signing-request-signatures Enable signature request from nodes that in turn requested gateway signature. --my-signing-weak_security Enable this to permit downgrade of security preferences and relaxed gateway signing requirements. --my-signing-password=<PASSWORD> If you are using password as the signature type, set your password here.root@pi0:~/MySensors# sudo ./bin/mysgw -h mysgw: Config file /etc/mysensors.dat does not exist, creating new config file. Usage: mysgw [options] Options: -h, --help Display a short summary of all program options. -d, --debug Enable debug. -b, --background Run as a background process. --gen-soft-hmac-key Generate and print a soft hmac key. --gen-soft-serial-key Generate and print a soft serial key. --gen-aes-key Generate and print an aes encryption key. --print-soft-hmac-key Print the soft hmac key from the config file. --print-soft-serial-key Print the soft serial key from the config file. --print-aes-key Print the aes encryption key from the config file. --set-soft-hmac-key Write a soft hmac key to the config file. --set-soft-serial-key Write a soft serial key to the config file. --set-aes-key Write an aes encryption key to the config file.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login