DIY Blind Control Motor
-
I'm looking to control my vertical blinds using a stepper motor, an arduino, and the mysensors system. Essentially, all I want the system to do is to run the stepper motor in FWD or REV direction for X amount of time (X amount of revolutions is preferred but I don't know if steppers can do this) and control it using Vera.
Is this doable? It seems pretty simple but I hope I'm not overlooking anything
-
Thanks! I've also got a bit of a space constraint so I can't put the stepper motor directly in front of the gear which needs to be driven. Currently, a metal chain causes a wheel to turn which closes/opens the blinds. I was hoping to attach a gear to this wheel and then attach the servo underneath to that gear (if that makes sense).
Is there a good resource to find motors which can be used with gears? Or a place you can recommend to buy the gears themselves?
-
I have been working on something like this too. I'm using the EasyDriver V44 and a 2 phase 42mm stepper motor NEMA17.
I have the sketch all done but are still missing some parts to mount it to my blinds.
Here is the sketch just as an example:What it does is just open or close the blinds locally using a push button or from vera using a window cover device.
It only supports open or close position but if you are skilled with code you could probably make it go to any position 0-100% covered.
There is also some code that can set a home position for the blinds. In my case home is the same as fully open blinds.
There is another push button for the home function, basically it will back up the motor as long as you hold the button and when you release it will sync vera and the stepper motor so that both know it is now fully open.
The current position of the blinds (open or close) is stored in V_VAR1 so vera contains the last known position. So if the stepper motor loos power it will get the last position from vera.
I have not tested it that much so it might contain bugs but maybe my code will be helpful for your project also.Regards,
Tomas -
I have been working on something like this too. I'm using the EasyDriver V44 and a 2 phase 42mm stepper motor NEMA17.
I have the sketch all done but are still missing some parts to mount it to my blinds.
Here is the sketch just as an example:What it does is just open or close the blinds locally using a push button or from vera using a window cover device.
It only supports open or close position but if you are skilled with code you could probably make it go to any position 0-100% covered.
There is also some code that can set a home position for the blinds. In my case home is the same as fully open blinds.
There is another push button for the home function, basically it will back up the motor as long as you hold the button and when you release it will sync vera and the stepper motor so that both know it is now fully open.
The current position of the blinds (open or close) is stored in V_VAR1 so vera contains the last known position. So if the stepper motor loos power it will get the last position from vera.
I have not tested it that much so it might contain bugs but maybe my code will be helpful for your project also.Regards,
Tomas -
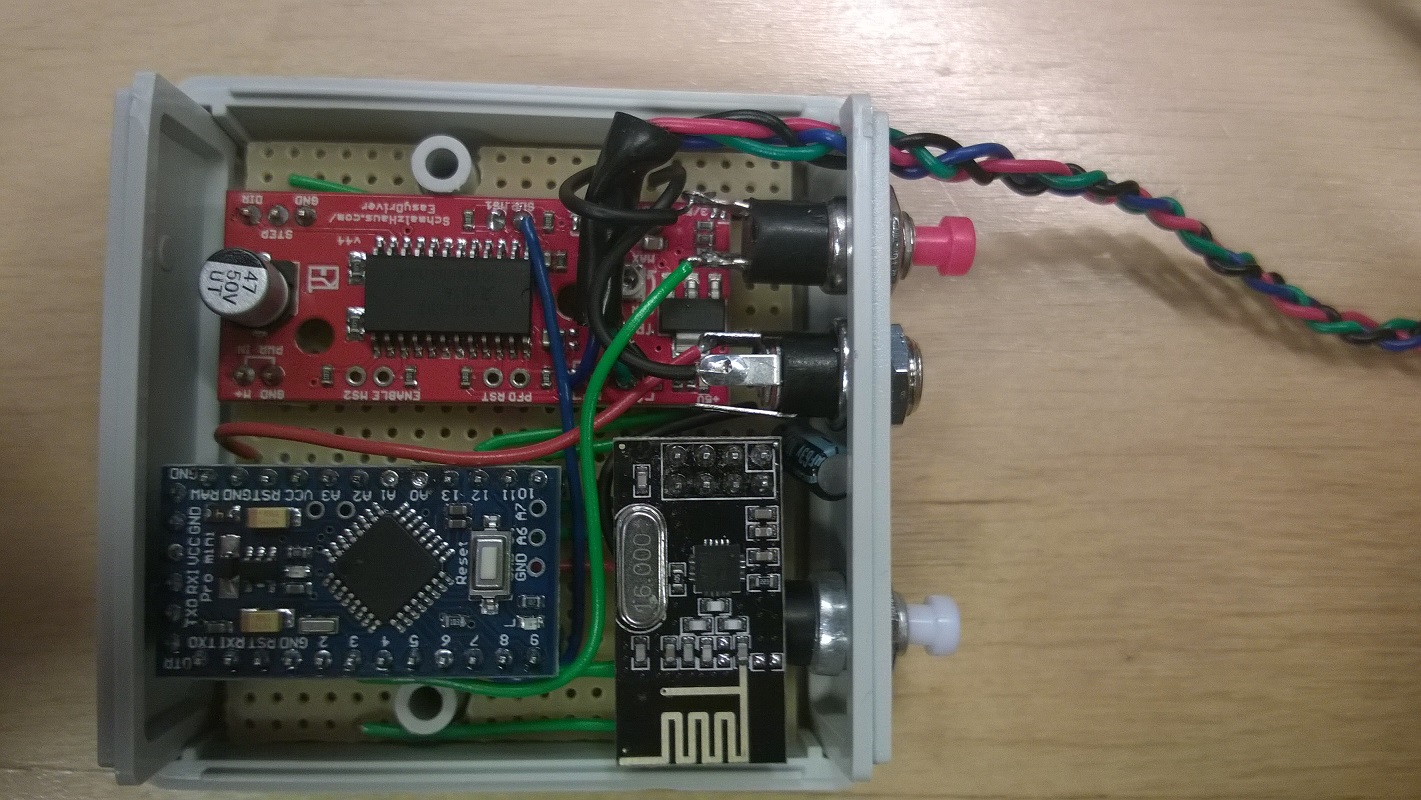
I really did not put much thought in to the physical setup, I just squeezed it in to as small a box I could. Here is some pictures. Still waiting for some parts to get it mounted.
I forgot to mention that the "sleep" pin of the driver board is also connected to the arduino to enable the motor to spin freely when it is not being controlled from the arduino. I want it to be possible to use the original cord to open/close the blinds also (WAF).

-
Nice work...Especially your platting of the wires! ( id need my daughters to do that!)
What sort of torque can you get out of a motor that size? I bought some tubular blind motors ( sight unseen) on ebay...but the diameter of them is too big for standard internal blind tubes....bummer!
Cant wait to see your creation in action and how you connect the motor the the blind...
Great stuff!
-
Platting is not that hard. If you are an engineer you just need the will to do something and then you just make it happen, one way or another (youtube).
It said "Holding torque : 2.8 kg.cm" on the ebay site, whatever that means.
I'll update with it in action as soon as I find a way to connect it to my blinds, still missing some parts so it might be a few weeks...
-
I'm not clear on why you need the EasyDriver V44 red board, can't the arduino board control the stepper motor directly?
PS. Setup looks great! Looking forward to seeing the pictures of it all installed and functional!
likely the stepper motor's power requirements... Arduino outputs only 40mA on a pin
-
likely the stepper motor's power requirements... Arduino outputs only 40mA on a pin
In the servo example sketch on the site there's no driver board - I guess the Arduino can support certain motors but not others?
-
Like BULLDOGLOWELL said it is due to the current consumption of the motor.
The motor I use needs up to 400mA so it is 10 times what the arduino can handle. -
I really did not put much thought in to the physical setup, I just squeezed it in to as small a box I could. Here is some pictures. Still waiting for some parts to get it mounted.
I forgot to mention that the "sleep" pin of the driver board is also connected to the arduino to enable the motor to spin freely when it is not being controlled from the arduino. I want it to be possible to use the original cord to open/close the blinds also (WAF).
-
TL;DR:
Tried using a 12V 2A power supply, caused issues with the EasyDriver (flashing LED). I found an old 12V 1.5A power supply from a WD External HDD and it works fine (the unedited EasyStepper.ino from @korttoma).Now I'm looking for a good power supply supplier to avoid this issue in the future...or can I buy some sort of regulator to regulate 12-20V 2A to 12V 2A?
-
and the motor is turning extremely slow using the EasyDriver V4.4 . It says the motor is rated at 12V 1.3A but the EasyDriver is only up to 700mA. The EasyDriver gets very hot as well, could this be the reason? I'm thinking of switching to the Big Easy Driver but I'm not sure if it'll help
-
and the motor is turning extremely slow using the EasyDriver V4.4 . It says the motor is rated at 12V 1.3A but the EasyDriver is only up to 700mA. The EasyDriver gets very hot as well, could this be the reason? I'm thinking of switching to the Big Easy Driver but I'm not sure if it'll help
@naveen Sorry for the late reply. I think it is safe to use the EasyDriver board on that motor because it has a current limiter. My guess is the EasyDriver board runs hot because you do not put it to sleep when not moving. Basically the EasyDriver board is holding the motor in its current position by feeding full current trough one of the coils. If you do not want it to hold it down by full force so it is impossible to rotate the motor you need to connect the sleep pin.
I have a similar motor also that I plan to use with the EasyDriver but I have not had a chance to wire it yet.
The Big Easy Driver board looks nice, I think I will order one of those to...
-
@naveen Sorry for the late reply. I think it is safe to use the EasyDriver board on that motor because it has a current limiter. My guess is the EasyDriver board runs hot because you do not put it to sleep when not moving. Basically the EasyDriver board is holding the motor in its current position by feeding full current trough one of the coils. If you do not want it to hold it down by full force so it is impossible to rotate the motor you need to connect the sleep pin.
I have a similar motor also that I plan to use with the EasyDriver but I have not had a chance to wire it yet.
The Big Easy Driver board looks nice, I think I will order one of those to...
The speed is also really slow, I can't get past about 400microsteps/second (which is 50 steps * 1.8deg/step = 90deg/sec) - that doesn't seem normal...right? I set the max speed and speed to 8000 and it doesn't seem to help.
Would low current cause low speeds? It does turn the correct amount, though.
-
The speed is also really slow, I can't get past about 400microsteps/second (which is 50 steps * 1.8deg/step = 90deg/sec) - that doesn't seem normal...right? I set the max speed and speed to 8000 and it doesn't seem to help.
Would low current cause low speeds? It does turn the correct amount, though.
@naveen could be that you are right and the 700mA current is just not enough for your motor. Sorry I can't be of more help with your problems.
btw, I have updated my sketch to 1.4b1 and at the same time changed it so that I can basically send the blinds to any position between fully open and closed using the dimmer slider in Vera. And my setup has now performed flawlessly for over 1 month opening/closing twice every day.
I will share the sketch file when I get home if I remember.
-
I've mounted a little Fubata servo motor to my blinds and it works just fine. I drive it directly from my Arduino so no need to an external power supply. I have a button that opens and closes it. Now Im looking forward to connecting a RF Receiver on my Arduino so I can control it from my Veralite.
I like the servo motor better because it's smaller, cheaper and you can tell it exactly how many degrees it should turn (0 - 180). -
@naveen could be that you are right and the 700mA current is just not enough for your motor. Sorry I can't be of more help with your problems.
btw, I have updated my sketch to 1.4b1 and at the same time changed it so that I can basically send the blinds to any position between fully open and closed using the dimmer slider in Vera. And my setup has now performed flawlessly for over 1 month opening/closing twice every day.
I will share the sketch file when I get home if I remember.
@korttoma said:
@naveen could be that you are right and the 700mA current is just not enough for your motor. Sorry I can't be of more help with your problems.
btw, I have updated my sketch to 1.4b1 and at the same time changed it so that I can basically send the blinds to any position between fully open and closed using the dimmer slider in Vera. And my setup has now performed flawlessly for over 1 month opening/closing twice every day.
I will share the sketch file when I get home if I remember.
I pulled some of the pins to ground on the Big EasyDriver and it changed the number of microsteps and I was able to drive it faster, now I've got to find a decent gear to connect it to the blinds!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login