1.4 Beta
-
@hek I had a look at the latest state of the 1.4 header format and saw the sender/last/destination have moved to the front position.
This means the protocol version is, once again, located at a different position w.r.t. 1.3 and earlier 1.4 version.
For software trying to interpret any MySensors message (e.g. my sniffer or a (future) MySensors version supporting different protocol versions) or software that checks the library version to match with its own version it becomes nearly impossible to detect which library version a message was sent with.
I propose to start any message, now and in the future, with a protocol version (use a full byte or use some remaining bits for protocol independent data) and stick to that. This makes life for sugested applications a lot easier.
Adding a version which has a different offset every time makes no sense...Sorry.. the sniffer slipped my mind. The purpose was to prepare for future encryption (keeping the changing "last"-field first) and potential split of the routing information and payload. Which would be necessary for supporting other transportation layers (like RadioHead). They might not be interested in any MySensors version-specifics first in the radio message.
Do you have any suggestion?
-
Sorry.. the sniffer slipped my mind. The purpose was to prepare for future encryption (keeping the changing "last"-field first) and potential split of the routing information and payload. Which would be necessary for supporting other transportation layers (like RadioHead). They might not be interested in any MySensors version-specifics first in the radio message.
Do you have any suggestion?
-
@hek I have another question: when sending from a sensor to a gateway the data can have all kinds of formats (text, byte, float etc) which comes out the gateway through the serial protocol. When sending the other way, I guess the serial data is always sent as text by the gateway to the sensor, right?
Too bad we can't also use different formats when sending through the serial api... Did you think about this? -
@Yveaux said:
It's in my post hek
Yes, you suggest to always have but that might not be possible if we choose some other transportation layer (which most probably will use the first bytes for it's own routing).
When sending the other way, I guess the serial data is always sent as text by the gateway to the sensor, right?
Too bad we can't also use different formats when sending through the serial api... Did you think about this?Yes, I've thought about it. We have a couple of options here. Start type:ing variables through the serial protocol (controller must send datatype) or have a hard coded variable->type map on arduino side. Both of these are valid options.
A binary serial protocol is also an option (could be an option when building gateway).. But that makes it harder to debug e.g. Arduino Serial Monitor. -
@Yveaux said:
It's in my post hek
Yes, you suggest to always have but that might not be possible if we choose some other transportation layer (which most probably will use the first bytes for it's own routing).
When sending the other way, I guess the serial data is always sent as text by the gateway to the sensor, right?
Too bad we can't also use different formats when sending through the serial api... Did you think about this?Yes, I've thought about it. We have a couple of options here. Start type:ing variables through the serial protocol (controller must send datatype) or have a hard coded variable->type map on arduino side. Both of these are valid options.
A binary serial protocol is also an option (could be an option when building gateway).. But that makes it harder to debug e.g. Arduino Serial Monitor.@hek said:
but that might not be possible if we choose some other transportation layer
Then the transportation layer data is not part of mysensors protocol. It's that simple!
IMHO This again boils down to nested protocol headers which we talked about before.
The routing info is part of transportation layer (it could even have its own version info) followed by the mysensors header ( starting with a version number) which tells us what's in the message. Then come the actual data, be it a value, presentation info or whatever. I can make a sketch of this structure if that helps in the discussion.http://yveaux.blogspot.nl
-
@hek said:
but that might not be possible if we choose some other transportation layer
Then the transportation layer data is not part of mysensors protocol. It's that simple!
IMHO This again boils down to nested protocol headers which we talked about before.
The routing info is part of transportation layer (it could even have its own version info) followed by the mysensors header ( starting with a version number) which tells us what's in the message. Then come the actual data, be it a value, presentation info or whatever. I can make a sketch of this structure if that helps in the discussion.I think we agree. Only problem is that I haven't split up the structure in mysensors-transportation/mysensors-header/mysensors-payload yet but if you look from the sniffer side this would not matter.
Please post you suggested structure (but in a new thread).
-
I think we agree. Only problem is that I haven't split up the structure in mysensors-transportation/mysensors-header/mysensors-payload yet but if you look from the sniffer side this would not matter.
Please post you suggested structure (but in a new thread).
I got this question from a friend and since I dont know the answer either;
I'm trying to figure out the sleep mode and if the radio module wakes up or not (via INT pin 2) .. but for me it does not seam to do this. Which sleep-modes does 1.4b have and how do I see if the message is for me, and if not continue sleep?
-
I got this question from a friend and since I dont know the answer either;
I'm trying to figure out the sleep mode and if the radio module wakes up or not (via INT pin 2) .. but for me it does not seam to do this. Which sleep-modes does 1.4b have and how do I see if the message is for me, and if not continue sleep?
The radio interrupts is not used at the moment.
It uses the following sleep modes
LowPower.powerDown(SLEEP_FOREVER, ADC_OFF, BOD_OFF);or
LowPower.powerDown(SLEEP_XXXXS, ADC_OFF, BOD_OFF);Depending on if you want timer to wake up or not. Radio is always put to sleep.
For more details, check out MySensor.cpp. -
I'm trying to create my own controller in Node-Red.
My setup is as followed:
Motion Sensor arduino with standard example sketch <--> SerialGateway arduino with standard example sketch <--> USB <--> Node-Red (installed on Raspberry PI)My SerialGateway receives the request for a node ID (255;255;3;0;3;)
I then return a serial command: 255;255;3;0;4;1You can see my Node-Red output below:
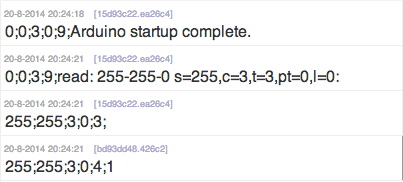
For some reason my SerialGateway is not broadcasting my command. It's only repeating the above commands sevral times;
Am i using the correct protocol values or is there something else I should do?
-
I'm trying to create my own controller in Node-Red.
My setup is as followed:
Motion Sensor arduino with standard example sketch <--> SerialGateway arduino with standard example sketch <--> USB <--> Node-Red (installed on Raspberry PI)My SerialGateway receives the request for a node ID (255;255;3;0;3;)
I then return a serial command: 255;255;3;0;4;1You can see my Node-Red output below:
For some reason my SerialGateway is not broadcasting my command. It's only repeating the above commands sevral times;
Am i using the correct protocol values or is there something else I should do?
-
If it's working from your gateway Serial Monitor in IDE you must be doing something wrong in your program.
-
If it's working from your gateway Serial Monitor in IDE you must be doing something wrong in your program.
Got it working, but my solution is not very satisfying.
I swapt the sketches on my 2 arduino's.
Original arduino setup was:
SerialGatway - Arduino pro mini 3.3v (including Decoupling-Capacitor)
Motion Sensor - Arduino Uno (including Decoupling-Capacitor)Now the sketches are switched and it works.
Eventually I will be working with only Arduino pro mini's but still the original setup should have worked.
-
Got it working, but my solution is not very satisfying.
I swapt the sketches on my 2 arduino's.
Original arduino setup was:
SerialGatway - Arduino pro mini 3.3v (including Decoupling-Capacitor)
Motion Sensor - Arduino Uno (including Decoupling-Capacitor)Now the sketches are switched and it works.
Eventually I will be working with only Arduino pro mini's but still the original setup should have worked.
-
@warawara did you try clearing using clear eeprom? That helped me some times. Dont really know why some nodes just wont want to recieve packages..
-
Ok, So I took the plunge and upgraded to 1.4.b1, and everything went "OK" with one glaring exception...... All temperatures display in Celsius. No matter what I do, I can't seem to get it to display in Fahrenheit..
Any Idea's?
-
@hek
I'd like to ask for a small change to be made to the sleep function.When we call gw.sleep(x) or gw.sleep(x,y,z) then the arduino disables the interrupt timer (to save power) that triggers the counter that drives millis(). So the value returned from millis() stalls when we sleep.
This is ok on our battery powered devices, since it's saving power, but makes it hard to determine how long it's been since we sent values to the gateway.
For example, if I use this code:
if ((unsigned long)(millis() - timeOfLastSensorSend) >= MIN_SAMPLING_INTERVAL) { // read sensors and send to gateway timeOfLastSensorSend = millis(); } gw.sleep(SLEEP_TIME);Then it doesn't work because millis() does not increment while the the sketch is asleep.
I have a thought on how we can solve this but I have a to get to a work meeting.
-
Ok, back from meeting.
So, for sketches that don't need to sleep on interrupt, then things are ok because I can code around it like this:
if ((unsigned long)(millis() - timeOfLastSensorSend) >= MIN_SAMPLING_INTERVAL) { // read sensors and send to gateway timeOfLastSensorSend = millis(); } gw.sleep(SLEEP_TIME); timeOfLastSensorSend -= SLEEP_TIME;My rationale here is that if millis doesn't increment then I should make my variable decrement by the same amount. Same effect.
However, the catch is when sleeping with interrupt. My thinking was to modify MySensors.cpp to change the return value of sleep. Something like this:
unsigned long MySensor::internalSleep(unsigned long ms) { unsigned long origMs = ms; while (continueTimer && ms >= 8000) { LowPower.powerDown(SLEEP_8S, ADC_OFF, BOD_OFF); ms -= 8000; } if (continueTimer && ms >= 4000) { LowPower.powerDown(SLEEP_4S, ADC_OFF, BOD_OFF); ms -= 4000; } ... if (continueTimer && ms >= 16) { LowPower.powerDown(SLEEP_15Ms, ADC_OFF, BOD_OFF); ms -= 15; } return (origMs - ms); } unsigned long MySensor::sleep(unsigned long ms) { // Let serial prints finish (debug, log etc) Serial.flush(); RF24::powerDown(); continueTimer = true; return internalSleep(ms); } unsigned long MySensor::sleep(int interrupt, int mode, unsigned long ms) { // Let serial prints finish (debug, log etc) unsigned long sleptFor = 0; Serial.flush(); RF24::powerDown(); attachInterrupt(interrupt, wakeUp, mode); //Interrupt on pin 3 for any change in solar power if (ms>0) { continueTimer = true; sleptFor = sleep(ms); } else { Serial.flush(); LowPower.powerDown(SLEEP_FOREVER, ADC_OFF, BOD_OFF); } detachInterrupt(interrupt); return sleptFor; }So rather than return a boolean on sleep(x,y,z), return the amount of time it slept for before it was interrupted. The check of the boolean is replaced with a check if return code > 0.
Hopefully my ramblings make some kind of sense.