What radio to use? NRF24L01+, RFM69, RFM73 ?
-
Sorry for being semi-retarded, but is this done in the gateway sketch? Sensor
-sketch or both? Is there any documentation on this part as I am a complete beginner. -
both, here is the documentation
-
@Cliff-Karlsson You have to change the following setting in Myconfig.h for you radio
/********************************** * RFM69 Driver Defaults ***********************************/ // Default network id. Use the same for all nodes that will talk to each other #define RFM69_NETWORKID 100 // Default frequency to use. This must match the hardware version of the RFM69 radio (uncomment one): #define RFM69_FREQUENCY RF69_433MHZ //#define RFM69_FREQUENCY RF69_868MHZ //#define FREQUENCY RF69_915MHZ // Enable this for encryption of packets //#define RFM69_ENABLE_ENCRYPTION #define RFM69_ENCRYPTKEY "sampleEncryptKey"Then in MySensor.h you change the following:
ifndef MySensor_h #define MySensor_h #include "Version.h" // Auto generated by bot #include "MyConfig.h" #include "MyHw.h" #include "MyTransport.h" //#include "MyTransportNRF24.h" #include "MyTransportRFM69.h" #include "MyParser.h" #ifdef MY_SIGNING_FEATURE #include "MySigning.h" #include "MySigningNone.h" #endif #include "MyMessage.h" #ifdef MY_OTA_FIRMWARE_FEATURE #include "utility/SPIFlash.h" #endif #include <stddef.h> #include <stdarg.h>``` // look for this lines and changes this class MySensor { public: /** * Constructor * * Creates a new instance of Sensor class. * */ //MySensor(MyTransport &radio =*new MyTransportNRF24(), MyHw &hw=*new MyHwDriver() MySensor(MyTransport &radio =*new MyTransportRFM69(), MyHw &hw=*new MyHwDriver() -
@fets said:
MyTransportRFM69 (RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, isRFM69HW, RF69_IRQ_NUM);
Hmm. I can't get it to work. This is what I have done:
In Myconfig.H:Everything was already set up like the example only 868Mhz was uncommented and that is the same as I got.
Mysensors.h:
Commented #include "MyTransportNRF24.h" as in the example.
Added "#include "MyTransportRFM69.h" as it was not present.Under class Mysensor,
Commented "MySensor(MyTransport &radio =*new MyTransportNRF24(), MyHw &hw=*new MyHwDriver()"
Added "MySensor(MyTransport &radio =*new MyTransportRFM69(), MyHw &hw=*new MyHwDriver()"In the Serial Gateway sketch:
Commented the line "#include <MyTransportNRF24.h>"
Commented the line "MyTransportNRF24 transport(RF24_CE_PIN, RF24_CS_PIN, RF24_PA_LEVEL_GW);"
Added the line "MyTransportRFM69 (RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, isRFM69HW=true, RF69_IRQ_NUM);When trying to upload to my nano I get an error:
'transport' was not declared in this scope.
And this line is highlighted: MySensor gw(transport, hw /, signer/); -
@fets said:
MyTransportRFM69 (RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, isRFM69HW, RF69_IRQ_NUM);
Hmm. I can't get it to work. This is what I have done:
In Myconfig.H:Everything was already set up like the example only 868Mhz was uncommented and that is the same as I got.
Mysensors.h:
Commented #include "MyTransportNRF24.h" as in the example.
Added "#include "MyTransportRFM69.h" as it was not present.Under class Mysensor,
Commented "MySensor(MyTransport &radio =*new MyTransportNRF24(), MyHw &hw=*new MyHwDriver()"
Added "MySensor(MyTransport &radio =*new MyTransportRFM69(), MyHw &hw=*new MyHwDriver()"In the Serial Gateway sketch:
Commented the line "#include <MyTransportNRF24.h>"
Commented the line "MyTransportNRF24 transport(RF24_CE_PIN, RF24_CS_PIN, RF24_PA_LEVEL_GW);"
Added the line "MyTransportRFM69 (RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, isRFM69HW=true, RF69_IRQ_NUM);When trying to upload to my nano I get an error:
'transport' was not declared in this scope.
And this line is highlighted: MySensor gw(transport, hw /, signer/);@Cliff-Karlsson, sorry for my late answer.
you made a mistake on the line added in the serialgateway, it should be :
MyTransportRFM69 transport (RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, true, RF69_IRQ_NUM) ; -
Has anyone used the Raspberry Pi Gateway implementation with an Rf69? Does it work? On which pin does one connect the interrupt pin ?
-
@fets said:
Personnaly I use 3 * 2 resistors (10k and 4.7k) for NS, MOSI and SCK rfm69hw inputs.
Ok, I am continuing with my neverending story :) I have gotten the sketches to complie and I have used a 8.6cm wire as antenna for both of them. But I still does not se any sensors in domoticz. I might have destroyed my radios as I might have accidently used 5 volts on them for a short while. I am trying to use some new radios this time.
First question: I have a RFM69HW on my gateway and a RFM69W on my sensor (both 868Mhz) They are compatible as I understand only that the H is more powerful?
Second question: If I am using a Nano I can just cut a cable in two and solder a 10k and a 4.7k in series in between them before connecting the NS, MOSI and SCK ? When checking online voltage divider calculators online and specify 5V in and 10k + 4,7k resistors it says that voltage out is 1.599v
-
@fets said:
Personnaly I use 3 * 2 resistors (10k and 4.7k) for NS, MOSI and SCK rfm69hw inputs.
Ok, I am continuing with my neverending story :) I have gotten the sketches to complie and I have used a 8.6cm wire as antenna for both of them. But I still does not se any sensors in domoticz. I might have destroyed my radios as I might have accidently used 5 volts on them for a short while. I am trying to use some new radios this time.
First question: I have a RFM69HW on my gateway and a RFM69W on my sensor (both 868Mhz) They are compatible as I understand only that the H is more powerful?
Second question: If I am using a Nano I can just cut a cable in two and solder a 10k and a 4.7k in series in between them before connecting the NS, MOSI and SCK ? When checking online voltage divider calculators online and specify 5V in and 10k + 4,7k resistors it says that voltage out is 1.599v
First question: I have a RFM69HW on my gateway and a RFM69W on my sensor (both 868Mhz) They are compatible as I understand only that the H is more powerful?
Assuming they are of the same frequency, then basically yes, though there is one small difference in the code to account for the RFM69HW having a PA, which MUST be turned on for it to transmit.
-
@fets said:
Personnaly I use 3 * 2 resistors (10k and 4.7k) for NS, MOSI and SCK rfm69hw inputs.
Ok, I am continuing with my neverending story :) I have gotten the sketches to complie and I have used a 8.6cm wire as antenna for both of them. But I still does not se any sensors in domoticz. I might have destroyed my radios as I might have accidently used 5 volts on them for a short while. I am trying to use some new radios this time.
First question: I have a RFM69HW on my gateway and a RFM69W on my sensor (both 868Mhz) They are compatible as I understand only that the H is more powerful?
Second question: If I am using a Nano I can just cut a cable in two and solder a 10k and a 4.7k in series in between them before connecting the NS, MOSI and SCK ? When checking online voltage divider calculators online and specify 5V in and 10k + 4,7k resistors it says that voltage out is 1.599v
@Cliff-Karlsson,
question 2 : I think you misplaced the connection to RFM69 :
Here is how to connect arduino and RFM69.
Is it what you did ? (I bet you switched 4.7k ans 10k )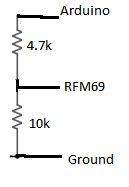
-
I am still having some problems with getting any data from the RFM69.
Do I need to define some pins to like in the NRF24L01 section in the Myconfig.h ?
I have not defined any pins anywhere for the RFM69 or do I not need to do that?/********************************** * NRF24L01 Driver Defaults ***********************************/ #define RF24_CE_PIN 9 #define RF24_CS_PIN 10 #define RF24_PA_LEVEL RF24_PA_MAX #define RF24_PA_LEVEL_GW RF24_PA_LOW // RF channel for the sensor net, 0-127 #define RF24_CHANNEL 76 //RF24_250KBPS for 250kbs, RF24_1MBPS for 1Mbps, or RF24_2MBPS for 2Mbps #define RF24_DATARATE RF24_250KBPS // This is also act as base value for sensor nodeId addresses. Change this (or channel) if you have more than one sensor network. #define RF24_BASE_RADIO_ID ((uint64_t)0xA8A8E1FC00LL) // Enable SOFTSPI for NRF24L01 when using the W5100 Ethernet module //#define SOFTSPI #ifdef SOFTSPI // Define the soft SPI pins used for NRF radio const uint8_t SOFT_SPI_MISO_PIN = 16; const uint8_t SOFT_SPI_MOSI_PIN = 15; const uint8_t SOFT_SPI_SCK_PIN = 14; #endif /********************************** * RFM69 Driver Defaults ***********************************/ // Default network id. Use the same for all nodes that will talk to each other #define RFM69_NETWORKID 100 // Default frequency to use. This must match the hardware version of the RFM69 radio (uncomment one): // #define RFM69_FREQUENCY RF69_433MHZ #define RFM69_FREQUENCY RF69_868MHZ //#define FREQUENCY RF69_915MHZ // Enable this for encryption of packets //#define RFM69_ENABLE_ENCRYPTION #define RFM69_ENCRYPTKEY "sampleEncryptKey" //exactly the same 16 characters/bytes on all nodes!``` -
I even sent a mail to hek asking for help and he said that the only thing I needed to do was to add the line:
MyTransportRFM69 transport;
in the serial gateway sketch and "construct your mysensor class with" : MySensor gw(transport);
I added those two lines in the serial gateway sketch and it complied and uploaded ok but as usual it does not work for me. Can someone give me the exact sketch for a serial gateway using the RFM69W radio and the dallas temperature sketch that is provided on the mysensors-build page modified for use with RFM69W? I would be forever grateful :)
-
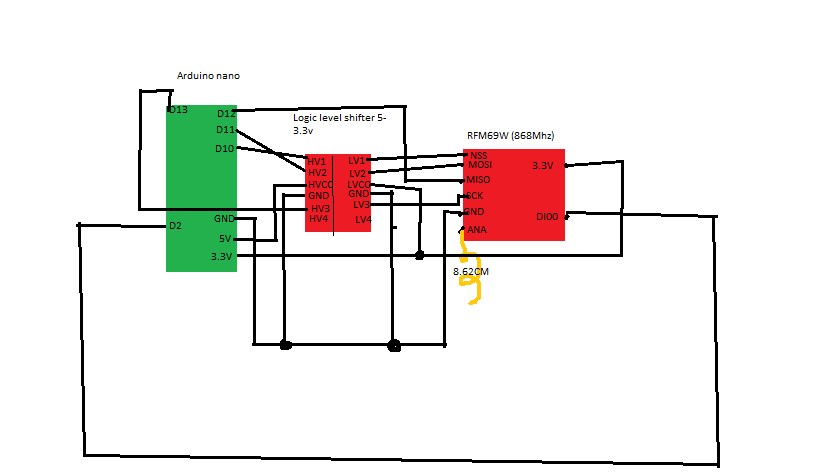
Still trying, can anyone tell me if this is correct: Nano-Levelshifter-RFM69W
-
@hek said:
Shouldn't D2-> DI00 have level shifting as well?
That's IRQ so it should be an output from the radio to the arduino just like MISO right? I was under the impression that radio->arduino links didn't need to be shifted since they're digital connections and the arduino will read 3.3V as HIGH. I could be mistaken of course...
@Cliff-Karlsson I'm going to start my RFM69 radio testing this weekend (finally) using ProMini 5V <-> level shifter <-> RFM69W so hopefully I can report back with something that works.
Anytime you have trouble, you should start w/ the simplest case and build up to a real case. So:
- use a serial gateway. start it up w/ debug output and make sure that the radio initializes properly.
- use the MockMySensors sketch or take a simple sketch and modify it to send an increasing counter value (1,2,3...) every second. start that w/ debug print as well (run 2 arduino ide's so you can use 2 serial monitor windows). That will tell you if the radios are receiving each other properly. You can use this to test range as well my moving one of the radios to another location.
- create a simple arduino sketch that reads the sensor. it shouldn't have any mysensors code in it. just report the sensor values to the serial connection. make sure that works. This validates the sensor reading and wiring code.
- combine 2+3 so you're sending real data to the gateway == success!
-
Well I am not very experienced so even the trivial task of creating a simple sketch would prove a challenge for me :).
But this is the SerialGateway sketch I am using:
#define NO_PORTB_PINCHANGES #include <MySigningNone.h> #include <MyTransportRFM69.h> //#include <MyTransportNRF24.h> #include <MyHwATMega328.h> #include <MySigningAtsha204Soft.h> #include <MySigningAtsha204.h> #include <SPI.h> #include <MyParserSerial.h> #include <MySensor.h> #include <stdarg.h> #include <PinChangeInt.h> #include "GatewayUtil.h" #define INCLUSION_MODE_TIME 1 // Number of minutes inclusion mode is enabled #define INCLUSION_MODE_PIN 3 // Digital pin used for inclusion mode button #define RADIO_ERROR_LED_PIN 4 // Error led pin #define RADIO_RX_LED_PIN 6 // Receive led pin #define RADIO_TX_LED_PIN 5 // the PCB, on board LED // NRFRF24L01 radio driver (set low transmit power by default) //MyTransportNRF24 transport(RF24_CE_PIN, RF24_CS_PIN, RF24_PA_LEVEL_GW); //MyTransportRFM69 transport; MyTransportRFM69 transport(RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, false, RF69_IRQ_NUM); // Message signing driver (signer needed if MY_SIGNING_FEATURE is turned on in MyConfig.h) //MySigningNone signer; //MySigningAtsha204Soft signer; //MySigningAtsha204 signer; // Hardware profile MyHwATMega328 hw; // Construct MySensors library (signer needed if MY_SIGNING_FEATURE is turned on in MyConfig.h) // To use LEDs blinking, uncomment WITH_LEDS_BLINKING in MyConfig.h #ifdef WITH_LEDS_BLINKING MySensor gw(transport, hw /*, signer*/, RADIO_RX_LED_PIN, RADIO_TX_LED_PIN, RADIO_ERROR_LED_PIN); #else MySensor gw(transport, hw /*, signer*/); #endif char inputString[MAX_RECEIVE_LENGTH] = ""; // A string to hold incoming commands from serial/ethernet interface int inputPos = 0; boolean commandComplete = false; // whether the string is complete void parseAndSend(char *commandBuffer); void output(const char *fmt, ... ) { va_list args; va_start (args, fmt ); vsnprintf_P(serialBuffer, MAX_SEND_LENGTH, fmt, args); va_end (args); Serial.print(serialBuffer); } void setup() { gw.begin(incomingMessage, 0, true, 0); setupGateway(INCLUSION_MODE_PIN, INCLUSION_MODE_TIME, output); // Add interrupt for inclusion button to pin PCintPort::attachInterrupt(pinInclusion, startInclusionInterrupt, RISING); // Send startup log message on serial serial(PSTR("0;0;%d;0;%d;Gateway startup complete.\n"), C_INTERNAL, I_GATEWAY_READY); } void loop() { gw.process(); checkButtonTriggeredInclusion(); checkInclusionFinished(); if (commandComplete) { // A command wass issued from serial interface // We will now try to send it to the actuator parseAndSend(gw, inputString); commandComplete = false; inputPos = 0; } } /* SerialEvent occurs whenever a new data comes in the hardware serial RX. This routine is run between each time loop() runs, so using delay inside loop can delay response. Multiple bytes of data may be available. */ void serialEvent() { while (Serial.available()) { // get the new byte: char inChar = (char)Serial.read(); // if the incoming character is a newline, set a flag // so the main loop can do something about it: if (inputPos<MAX_RECEIVE_LENGTH-1 && !commandComplete) { if (inChar == '\n') { inputString[inputPos] = 0; commandComplete = true; } else { // add it to the inputString: inputString[inputPos] = inChar; inputPos++; } } else { // Incoming message too long. Throw away inputPos = 0; } } }Does it look alright? I am fairly sure that I also tried using
MyTransportRFM69 transport;
instead ofMyTransportRFM69 transport(RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, false, RF69_IRQ_NUM);
In the serial monitor only this shows:0;0;3;0;9;gateway started, id=0, parent=0, distance=0
0;0;3;0;14;Gateway startup complete. -
Well I am not very experienced so even the trivial task of creating a simple sketch would prove a challenge for me :).
But this is the SerialGateway sketch I am using:
#define NO_PORTB_PINCHANGES #include <MySigningNone.h> #include <MyTransportRFM69.h> //#include <MyTransportNRF24.h> #include <MyHwATMega328.h> #include <MySigningAtsha204Soft.h> #include <MySigningAtsha204.h> #include <SPI.h> #include <MyParserSerial.h> #include <MySensor.h> #include <stdarg.h> #include <PinChangeInt.h> #include "GatewayUtil.h" #define INCLUSION_MODE_TIME 1 // Number of minutes inclusion mode is enabled #define INCLUSION_MODE_PIN 3 // Digital pin used for inclusion mode button #define RADIO_ERROR_LED_PIN 4 // Error led pin #define RADIO_RX_LED_PIN 6 // Receive led pin #define RADIO_TX_LED_PIN 5 // the PCB, on board LED // NRFRF24L01 radio driver (set low transmit power by default) //MyTransportNRF24 transport(RF24_CE_PIN, RF24_CS_PIN, RF24_PA_LEVEL_GW); //MyTransportRFM69 transport; MyTransportRFM69 transport(RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, false, RF69_IRQ_NUM); // Message signing driver (signer needed if MY_SIGNING_FEATURE is turned on in MyConfig.h) //MySigningNone signer; //MySigningAtsha204Soft signer; //MySigningAtsha204 signer; // Hardware profile MyHwATMega328 hw; // Construct MySensors library (signer needed if MY_SIGNING_FEATURE is turned on in MyConfig.h) // To use LEDs blinking, uncomment WITH_LEDS_BLINKING in MyConfig.h #ifdef WITH_LEDS_BLINKING MySensor gw(transport, hw /*, signer*/, RADIO_RX_LED_PIN, RADIO_TX_LED_PIN, RADIO_ERROR_LED_PIN); #else MySensor gw(transport, hw /*, signer*/); #endif char inputString[MAX_RECEIVE_LENGTH] = ""; // A string to hold incoming commands from serial/ethernet interface int inputPos = 0; boolean commandComplete = false; // whether the string is complete void parseAndSend(char *commandBuffer); void output(const char *fmt, ... ) { va_list args; va_start (args, fmt ); vsnprintf_P(serialBuffer, MAX_SEND_LENGTH, fmt, args); va_end (args); Serial.print(serialBuffer); } void setup() { gw.begin(incomingMessage, 0, true, 0); setupGateway(INCLUSION_MODE_PIN, INCLUSION_MODE_TIME, output); // Add interrupt for inclusion button to pin PCintPort::attachInterrupt(pinInclusion, startInclusionInterrupt, RISING); // Send startup log message on serial serial(PSTR("0;0;%d;0;%d;Gateway startup complete.\n"), C_INTERNAL, I_GATEWAY_READY); } void loop() { gw.process(); checkButtonTriggeredInclusion(); checkInclusionFinished(); if (commandComplete) { // A command wass issued from serial interface // We will now try to send it to the actuator parseAndSend(gw, inputString); commandComplete = false; inputPos = 0; } } /* SerialEvent occurs whenever a new data comes in the hardware serial RX. This routine is run between each time loop() runs, so using delay inside loop can delay response. Multiple bytes of data may be available. */ void serialEvent() { while (Serial.available()) { // get the new byte: char inChar = (char)Serial.read(); // if the incoming character is a newline, set a flag // so the main loop can do something about it: if (inputPos<MAX_RECEIVE_LENGTH-1 && !commandComplete) { if (inChar == '\n') { inputString[inputPos] = 0; commandComplete = true; } else { // add it to the inputString: inputString[inputPos] = inChar; inputPos++; } } else { // Incoming message too long. Throw away inputPos = 0; } } }Does it look alright? I am fairly sure that I also tried using
MyTransportRFM69 transport;
instead ofMyTransportRFM69 transport(RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, false, RF69_IRQ_NUM);
In the serial monitor only this shows:0;0;3;0;9;gateway started, id=0, parent=0, distance=0
0;0;3;0;14;Gateway startup complete.@Cliff-Karlsson First time I used RFM69 I didn't adapt level and the RFM69 initialization couldn't complete : meaning I didn't have the message "Gateway startup complete"
As soon as I used I used resistors to adapt levels, the initialization was fully completed.
So I think that your connections are good.
I think (from memory) that I created MyTransporRFM69 almost the same way as your (I use RFM69HW) :
MyTransportRFM69 transport(RFM69_FREQUENCY, RFM69_NETWORKID, RF69_SPI_CS, RF69_IRQ_PIN, true, RF69_IRQ_NUM);What about your node sketch ? Do you do the same ?
-
I would wonder whether running some signals through the level shifter and some not might cause the signals to arrive out of phase? Anyway, something to consider if you can't get it to work.
-
Ok, this is my temp sensor sketch. Does it also look Ok?
/** * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2015 Sensnology AB * Full contributor list: https://github.com/mysensors/Arduino/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * DESCRIPTION * * Example sketch showing how to send in DS1820B OneWire temperature readings back to the controller * http://www.mysensors.org/build/temp */ #include <MySensor.h> #include <SPI.h> #include <DallasTemperature.h> #include <OneWire.h> #include <MyTransportRFM69.h> #define COMPARE_TEMP 1 // Send temperature only if changed? 1 = Yes 0 = No #define ONE_WIRE_BUS 3 // Pin where dallase sensor is connected #define MAX_ATTACHED_DS18B20 16 unsigned long SLEEP_TIME = 30000; // Sleep time between reads (in milliseconds) OneWire oneWire(ONE_WIRE_BUS); // Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs) DallasTemperature sensors(&oneWire); // Pass the oneWire reference to Dallas Temperature. MyTransportRFM69 transport; MySensor gw(transport); float lastTemperature[MAX_ATTACHED_DS18B20]; int numSensors=0; boolean receivedConfig = false; boolean metric = true; // Initialize temperature message MyMessage msg(0,V_TEMP); void setup() { // Startup up the OneWire library sensors.begin(); // requestTemperatures() will not block current thread sensors.setWaitForConversion(false); // Startup and initialize MySensors library. Set callback for incoming messages. gw.begin(); // Send the sketch version information to the gateway and Controller gw.sendSketchInfo("Temperature Sensor", "1.1"); // Fetch the number of attached temperature sensors numSensors = sensors.getDeviceCount(); // Present all sensors to controller for (int i=0; i<numSensors && i<MAX_ATTACHED_DS18B20; i++) { gw.present(i, S_TEMP); } } void loop() { // Process incoming messages (like config from server) gw.process(); // Fetch temperatures from Dallas sensors sensors.requestTemperatures(); // query conversion time and sleep until conversion completed int16_t conversionTime = sensors.millisToWaitForConversion(sensors.getResolution()); // sleep() call can be replaced by wait() call if node need to process incoming messages (or if node is repeater) gw.sleep(conversionTime); // Read temperatures and send them to controller for (int i=0; i<numSensors && i<MAX_ATTACHED_DS18B20; i++) { // Fetch and round temperature to one decimal float temperature = static_cast<float>(static_cast<int>((gw.getConfig().isMetric?sensors.getTempCByIndex(i):sensors.getTempFByIndex(i)) * 10.)) / 10.; // Only send data if temperature has changed and no error #if COMPARE_TEMP == 1 if (lastTemperature[i] != temperature && temperature != -127.00 && temperature != 85.00) { #else if (temperature != -127.00 && temperature != 85.00) { #endif // Send in the new temperature gw.send(msg.setSensor(i).set(temperature,1)); // Save new temperatures for next compare lastTemperature[i]=temperature; } } gw.sleep(SLEEP_TIME); }``` -
Well I'm having problems too... :anguished: I'm running basically the same serial gateway code you are and, like you, it starts up fine. For my sensor, I'm using the MockSensor sketch modified to send a counter. That starts up fine as well but can't communicate with the gateway. I tried level shifting IRQ and not level shifting IRQ - no change. Basically the gateway never gets the transmitted message. I'm using a small helical antenna that came w/ the radio on the sensor and a home made dipole on the gateway. I'm going to try and replace my home made antenna with a helical model on the gateway and see what happens.
Here's what I see on the sensor:
find parent send: 254-254-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,st=bc:I'm using this level shifter. If my antenna mod doesn't work (I'm not expecting it to), I'll try changing this to a resistor network to do the shifting and see if that helps.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login