Power/ Usage sensor - multi channel - local display
-
@MarkV A few thing from what I read from the serial out:
-
The slave does not sense any pulses, all the values are at 0
-
The master gets a "fail" when sending data to the Gateway. Looks like a communication issue
-
Are you using an USB or LAN gateway. The Domoticz output show both.... I don't know if Domoticz can handle that.
-
You can try to delete the "old"/previous nodes and start the thing again. Domoticz should use a combined Usage/ Power sensor
@AWI
I´m using a LAN GW, i disconnected the serial and made the LAN one of it.
Mmm, the comms error is strange, they're at max one meter apart, with a tiny plaster wall in between, both also got a cap between vcc and gnd.
Next weekend i´m going to have a look at the slave input, rather strange that it doesn´t receives pulses.
I connected the 5volt line to all the 6 pulse meters and connected their output to D2 - D8, through a cord of network cable.
Thanks for all your help so far!!!!! -
-
@AWI
I´m using a LAN GW, i disconnected the serial and made the LAN one of it.
Mmm, the comms error is strange, they're at max one meter apart, with a tiny plaster wall in between, both also got a cap between vcc and gnd.
Next weekend i´m going to have a look at the slave input, rather strange that it doesn´t receives pulses.
I connected the 5volt line to all the 6 pulse meters and connected their output to D2 - D8, through a cord of network cable.
Thanks for all your help so far!!!!! -
Dawm maybe thats the problem..
I connected the 5v as commen to the pulse + and the - to the digital inputs.So to be sure i need to connect the pulse + to the digitale inputs and the pulse - to gnd????
@MarkV I would depend on your S0 meters, but normal is "open collector" so you can connect '-' to ground and '+' to the input (= pull-up to Vcc).
(another way to connect is + to vcc and - to input, but then you need external "pull down" resistors and change the sketch)
-
Then thats the problem with the slave arduino getting no data. I connected the pulse output like you mentioned second and didn't changed the sketch.
Maybe i'm home tomorrow then i will give it a try.
Or is it hard to chsnge the sketch? And what should i change? -
Then thats the problem with the slave arduino getting no data. I connected the pulse output like you mentioned second and didn't changed the sketch.
Maybe i'm home tomorrow then i will give it a try.
Or is it hard to chsnge the sketch? And what should i change?@MarkV it is indicated in the sketch but you also need external resistors for pull-down. If you disable the internal pull-up resistors the levels are inverted. So you also need to'invert' the measurements or you are measuring the pulse width instead of the time between pulses.
-
Tonight i checked the wires and changed them and i believe your wright, the output is:
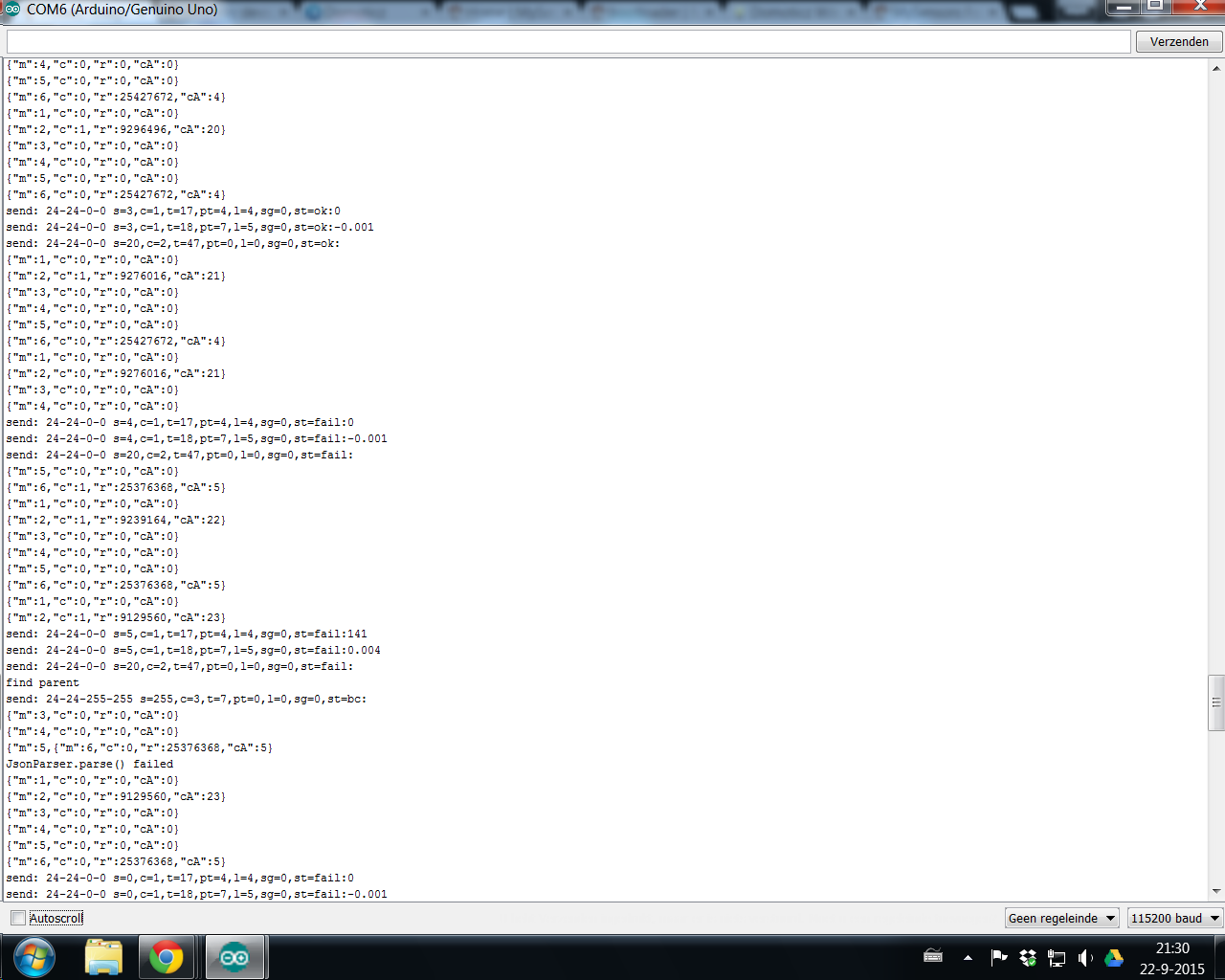
But it keeps giving a error, so i hangt them near each other with approx. 10cm space in between, why does it stil say fail after a good startup with ok and after 10a20sec it starts saying fail..
Is the readout correct?
And what more could cause the fail error? -
Tonight i checked the wires and changed them and i believe your wright, the output is:
But it keeps giving a error, so i hangt them near each other with approx. 10cm space in between, why does it stil say fail after a good startup with ok and after 10a20sec it starts saying fail..
Is the readout correct?
And what more could cause the fail error? -
the code for the measurement device::
//--------------------------------------------------------------------------------------------- // Arduino Pulse Counting Sketch for counting pulses from up to 12 pulse output meters. // uses direct port manipulation to read from each register of 6 digital inputs simultaneously // // Licence: GNU GPL // part of the openenergymonitor.org project // // Author: Trystan Lea // AWI: adapted to produce JSON and error checking at client side. //--------------------------------------------------------------------------------------------- //--------------------------------------------------------------------------------------------- // Pulse Counting Class - could be placed in seperate library... //--------------------------------------------------------------------------------------------- class PulseOutput { public: //AWI: access to all boolean pulse(int,int,unsigned long); //Detects pulses, in pulseLib.ino unsigned long rate( unsigned long ); //Calculates rate unsigned long count; //pulse count accumulator unsigned long countAccum; //pulse count total accumulator for extended error checking (only resets at startup) unsigned long prate; //pulse width in time unsigned long prateAccum; //pulse rate accumulator for calculating mean. private: boolean ld,d; //used to determine pulse edge unsigned long lastTime,time; //used to calculate rate }; //--------------------------------------------------------------------------------------------- // Variable declaration //--------------------------------------------------------------------------------------------- //CHANGE THIS TO VARY RATE AT WHICH PULSE COUNTING ARDUINO SPITS OUT PULSE COUNT+RATE DATA //time in seconds; const unsigned long printTime = 1000000; // delay between serial outputs in us (one meter at a time) const int lastMeter = 7 ; // is number of meters + 1 byte curMeter = 2 ; // current meter for serial output, wraps from 2 to lastMeter //--------------------------------------------------------------------------------------------- PulseOutput p[14]; //Pulse output objects int a,b,la,lb; //Input register variables unsigned long ltime, time; //time variables void setup() { // take care: pull-up inverses state! line 155 //setup input pins here with pull_up, else (default) float pinMode( 2, INPUT_PULLUP); pinMode( 3, INPUT_PULLUP); pinMode( 4, INPUT_PULLUP); pinMode( 5, INPUT_PULLUP); pinMode( 6, INPUT_PULLUP); pinMode( 7, INPUT_PULLUP); pinMode( 8, INPUT_PULLUP); pinMode( 9, INPUT_PULLUP); pinMode(10, INPUT_PULLUP); pinMode(11, INPUT_PULLUP); pinMode(12, INPUT_PULLUP); pinMode(13, INPUT_PULLUP); Serial.begin(115200); //standard serial DDRD = DDRD | B00000000; DDRB = DDRD | B00000000; } void loop() { la = a; //last register a used to detect input change lb = b; //last register b used to detect input change //-------------------------------------------------------------------- // Read from input registers //-------------------------------------------------------------------- a = PIND >> 2; //read digital inputs 2 to 7 really fast b = PINB; //read digital inputs 8 to 13 really fast time = micros(); if (la!=a || lb!=b) { //-------------------------------------------------------------------- // Detect pulses from register A //-------------------------------------------------------------------- p[2].pulse(0,a,time); //digital input 2 p[3].pulse(1,a,time); // '' 3 p[4].pulse(2,a,time); // '' etc p[5].pulse(3,a,time); p[6].pulse(4,a,time); p[7].pulse(5,a,time); //-------------------------------------------------------------------- // Detect pulses from register B //-------------------------------------------------------------------- p[8].pulse(0,b,time); //digital input 8 p[9].pulse(1,b,time); //etc p[10].pulse(2,b,time); p[11].pulse(3,b,time); p[12].pulse(4,b,time); p[13].pulse(5,b,time); } //-------------------------------------------------------------------- // Spit out data every printTime sec (time here is in microseconds) //-------------------------------------------------------------------- // build JSON: for all counters print Count (W), Count Accum(W), Average ms // Format {"m":meter,"c":count,"r":rate, "cA":countAccum} if ((time-ltime)>(printTime)) { ltime = time; //Print timer { Serial.print("{\"m\":"); Serial.print(curMeter-1); //Print meter number Serial.print(",\"c\":"); Serial.print(p[curMeter].count); //Print pulse count Serial.print(",\"r\":"); Serial.print(p[curMeter].rate(time)); //Print pulse rate p[curMeter].countAccum += p[curMeter].count; //Increment and print count accumulator to allow for error checking at client side; Serial.print(",\"cA\":"); Serial.print(p[curMeter].countAccum); Serial.println("}"); p[curMeter].count = 0; //Reset count (we just send count increment) p[curMeter].prateAccum = 0; //Reset accum so that we can calculate a new average } curMeter++ ; if (curMeter > lastMeter){ // wrap a around if passed last meter curMeter = 2;} } } // library for pulse, originally in separate file //----------------------------------------------------------------------------------- //Gets a particular input state from the register binary value // A typical register binary may look like this: // B00100100 // in this case if the right most bit is digital pin 0 // digital 2 and 5 are high // The method below extracts this from the binary value //----------------------------------------------------------------------------------- #define BIT_TST(REG, bit, val)( ( (REG & (1UL << (bit) ) ) == ( (val) << (bit) ) ) ) //----------------------------------------------------------------------------------- // Method detects a pulse, counts it, finds its rate, Class: PulseOutput //----------------------------------------------------------------------------------- boolean PulseOutput::pulse(int pin, int a, unsigned long timeIn) { ld = d; //last digital state = digital state if (BIT_TST(a,pin,1)) d = 1; else d = 0; //Get current digital state from pin number // if (ld==0 && d==1) // no internal pull_up if state changed from 0 to 1: internal pull-up inverts state if (ld==1 && d==0) //pull_up f state changed from 0 to 1: internal pull-up inverts state { count++; //count the pulse // Rate calculation lastTime = time; time = timeIn ; // correction to allow for processing prate = (time-lastTime);// - 400; //rate based on last 2 pulses //-190 is an offset that may not be needed...?? prateAccum += prate - 2000; //accumulate rate for average calculation return 1; } return 0; } //----------------------------------------------------------------------------------- // Method calculates the average rate based on multiple pulses (if there are 2 or more pulses) //----------------------------------------------------------------------------------- unsigned long PulseOutput::rate(unsigned long timeIn) { if (count > 1) { prate = prateAccum / count; //Calculate average } else { if ((timeIn - lastTime)>(prate*2)) prate = 0;} //Decrease rate if no pulses are received //in the expected time based on the last //pulse width. return prate; }@AWI
Your measurement sketch is really nice. There is one line I do not understand.prateAccum += prate - 2000;
Is this prateAccum needed or couldn't it be left away? What is the meaning of 2000 in this context?
Cu,
FotoFieber -
@AWI
Your measurement sketch is really nice. There is one line I do not understand.prateAccum += prate - 2000;
Is this prateAccum needed or couldn't it be left away? What is the meaning of 2000 in this context?
Cu,
FotoFieber@FotoFieber To be honest .. a left over from some experiments. Just leave it out... you won't notice the difference.
-
@AWI thanks again!
I am using your sketches with only one S0 Meter (the 2000pulse/kwh one).
*One thing i just found out, that as long as the master arduino is connected to the serial port of my pc it is running fine but when its not, it does not send.I have checked the voltage at the radio and it is the same... I also do not have any display or rotary encoder, as I do the visualisation with FHEM.
Do you know why this is the case? * -> Voltage was to low... but the secon question remains:Any idea to use differen pulses/kwh S0 meters? for example one 2000pulse/kwh and one 800 pulse/kwh.
thanks in advance! -
Arduino: 1.6.5 (Windows 7), Board:"Arduino Nano, ATmega328"
sketch_oct03e:128: error: 'V_TEXT' was not declared in this scope
sketch_oct03e.ino: In function 'void setup()':
sketch_oct03e:162: error: 'S_INFO' was not declared in this scope
sketch_oct03e.ino: In function 'void loop()':
sketch_oct03e:337: error: 'V_TEXT' was not declared in this scope
sketch_oct03e.ino: In function 'void incomingMessage(const MyMessage&)':
sketch_oct03e:364: error: 'V_TEXT' was not declared in this scope
'V_TEXT' was not declared in this scopeDit rapport zou meer informatie hebben met
"Tijdens de compilatie uitgebreide uitvoer weergeven"
ingeschakeld in Bestand > Voorkeuren. -
Arduino: 1.6.5 (Windows 7), Board:"Arduino Nano, ATmega328"
sketch_oct03e:128: error: 'V_TEXT' was not declared in this scope
sketch_oct03e.ino: In function 'void setup()':
sketch_oct03e:162: error: 'S_INFO' was not declared in this scope
sketch_oct03e.ino: In function 'void loop()':
sketch_oct03e:337: error: 'V_TEXT' was not declared in this scope
sketch_oct03e.ino: In function 'void incomingMessage(const MyMessage&)':
sketch_oct03e:364: error: 'V_TEXT' was not declared in this scope
'V_TEXT' was not declared in this scopeDit rapport zou meer informatie hebben met
"Tijdens de compilatie uitgebreide uitvoer weergeven"
ingeschakeld in Bestand > Voorkeuren. -
Arduino: 1.6.5 (Windows 7), Board:"Arduino Nano, ATmega328"
sketch_oct03e:128: error: 'V_TEXT' was not declared in this scope
sketch_oct03e.ino: In function 'void setup()':
sketch_oct03e:162: error: 'S_INFO' was not declared in this scope
sketch_oct03e.ino: In function 'void loop()':
sketch_oct03e:337: error: 'V_TEXT' was not declared in this scope
sketch_oct03e.ino: In function 'void incomingMessage(const MyMessage&)':
sketch_oct03e:364: error: 'V_TEXT' was not declared in this scope
'V_TEXT' was not declared in this scopeDit rapport zou meer informatie hebben met
"Tijdens de compilatie uitgebreide uitvoer weergeven"
ingeschakeld in Bestand > Voorkeuren.@marten You need to use the "Development" branch of MySensors until the production version gets updated -or- you can uncomment the lines with "const int ..."
// new V_TEXT variable type (development 20150905) //const int V_TEXT = 47 ; // new S_INFO sensor type (development 20150905) //const int S_INFO = 36 ; -
@AWI thanks again!
I am using your sketches with only one S0 Meter (the 2000pulse/kwh one).
*One thing i just found out, that as long as the master arduino is connected to the serial port of my pc it is running fine but when its not, it does not send.I have checked the voltage at the radio and it is the same... I also do not have any display or rotary encoder, as I do the visualisation with FHEM.
Do you know why this is the case? * -> Voltage was to low... but the secon question remains:Any idea to use differen pulses/kwh S0 meters? for example one 2000pulse/kwh and one 800 pulse/kwh.
thanks in advance!@jeti as mentioned in a previous post..
There are a few ways of getting it changed:
You can keep/ leave most as it is and when you send/ or display the values divide the pulses by two and double the Watt values in the routines "LCD_local_display" and "sendPowerUpdate"
or: make the necessary calculations when the data comes in. This is a little more complicated in routine "storeMeterJSON" but if you understand the logic (including error corrrection) should be not too hard.
I don't have the time at this moment to do it for you...
-
@jeti as mentioned in a previous post..
There are a few ways of getting it changed:
You can keep/ leave most as it is and when you send/ or display the values divide the pulses by two and double the Watt values in the routines "LCD_local_display" and "sendPowerUpdate"
or: make the necessary calculations when the data comes in. This is a little more complicated in routine "storeMeterJSON" but if you understand the logic (including error corrrection) should be not too hard.
I don't have the time at this moment to do it for you...
-
was not that much work :smiley:
this is the modified master-sketch from AWI i am starting to use. The changes i made:
-deletion of LCD and rotray part
-deletion of accumulation part
-modified meterType to meter800, meter1000 and meter2000 this reflects meters with 800imp/khw;1000imp/kwh;2000imp/kwhI am using this with only one meter (2000imp/kwh) for now and works pretty nicly second different meter type is on the way.
As I am a beginner please be gentle with comments :-)
#include <MySensor.h> // MySensors network #include <SPI.h> #include <Time.h> #include <ArduinoJson.h> // used to parse the simple JSON output of the pulse meter https://github.com/bblanchon/ArduinoJson // Constants & globals const int NO_METERS = 1 ; // actual meters used (max 12) const int NODE_ID = 152 ; // fixed MySensors node ID const int JSON_LENGHT = 80 ; // Maximum json string length // new V_TEXT variable type (development 20150905) const int V_TEXT = 47 ; // new S_INFO sensor type (development 20150905) const int S_INFO = 36 ; char lastLCD1[21] = "-- "; // LCD message line typedef enum meterTypes: int8_t {meter800, meter1000, meter2000} ; // metertype meter800, meter1000, meter2000; const char METER_NAMES[NO_METERS][4] = {"PC"} ; // meter names const meterTypes METER_TYPES[NO_METERS] = {meter2000}; const unsigned long idleTime = 10000 ; // Delay time for any of the states to return to idle unsigned long idleTimer ; // Delay timer for idleTime union { // used to convert long to bytes for EEPROM storage long kWhLongInt; uint8_t kWhLongByte[4]; } kWhLong ; // Possible states for the state machine. // Idle: default state, show totals for in/out nett // Browse: dive into meter details // Update: update meter value (Wh total) // Reset: reset day values enum States: int8_t {IDLE, BROWSE, UPDATE, RST} ; uint8_t State = IDLE; // current state machine state // meter class, store all relevant meter data (equivalent to struct) class pulseMeter { public: long UsageWh; // last (current) usage (in W) from pulse counter long UsageAccumWh; // usage accumulator (to keep in sync) from pulse counter long PowerW; // actual power, calculated from pulse "rate" long DayUsageWh; // daily usage for display meterTypes Type; // metertype for addition in totals: meter800, meter1000, meter2000; char Name[4] ; // meter name for display }; pulseMeter pulseMeters[NO_METERS] ; // define power meters //pulseMeter meter800, meter1000, meter2000; // pulse/kWh unsigned long tempUsageWh ; // temporary store while manually updating (state UPDATE) // Json parser: define parse object: <10> = number of tokens in JSON: ~10 per m (4 * [key, value] + key_total, value_total)) // example: "{\"m\":1,\"c\":12,\"r\":120000,\"cA\":12345}" char json[JSON_LENGHT] ; // Storage for serial JSON string (init for example) // flags & counters bool timeReceived = false; // controller time bool newDay = false; // reset at 00:00:00 unsigned long lastUpdate=0, lastRequest=0, lastDisplay=0, lastSyncKWH=0; // loop timers for once in while events int updateMeter = 0; // current meter for update bool updateDisplayFlag = true ; // indicate that display needs to be updated int currentMeter = 0; // active meter for update & check, cycles through meters (0..NO_METERS-1) int lastRotary = 0; // last rotary encoder position int updateIncrement = 1000 ; // Interval multiplier for Update int errCount = 0 ; // error counter // *** Definition and initialisation // define the MySensor network MySensor gw; // pins used RFX24(default 9,10) // Initialize messages for sensor network MyMessage powerMsg(0,V_WATT); // message to send power in W MyMessage usageMsg(0,V_KWH); // message to send usage in kWH MyMessage textMsg(0,V_TEXT); // message to send/receive text // function to reset the Arduino (jump to 0 address) void(* resetFunc) (void) = 0;//declare reset function at address 0 void setup(void) { gw.begin(incomingMessage, NODE_ID, false); // this node is fixed, no repeat //Send the sensor node sketch version information to the gateway gw.sendSketchInfo("AWI-12ChannelPulse", "2.0"); // Initialize the meter names // Register all Pulse counters to gw (they will be created as child devices from 0 to MAX-1) for (int x = 0; x < NO_METERS; x++){ gw.present(x, S_POWER, METER_NAMES[x]); // present power meters to gateway delay(10); // give it some time to process } delay(100); for (int x = 0; x < NO_METERS; x++){ // initialize previous kWh values from EEPROM and init for (int y = 0; y < 4 ; y++){ // convert from bytes kWhLong.kWhLongByte[y]= gw.loadState(x *4 + y) ;// EEPROM position = meter number * 4 bytes } // controller is updated later automatically pulseMeters[x].UsageWh = kWhLong.kWhLongInt; strcpy(pulseMeters[x].Name, METER_NAMES[x] ); // copy string for meter names pulseMeters[x].Type = METER_TYPES[x]; // Set type } } void loop(void) { // Before specific states, perform generic tasks unsigned long now = millis(); // Timer in loop for "once in a while" events gw.process() ; // process incoming messages // If no time has been received yet, request it every 10 second from controller if ((!timeReceived && (now-lastRequest > 10*1000)) || (now-lastRequest > 3600000UL)){ // request update every hour to keep in sync Serial.println(F("requesting time")); // Request time from controller. timeReceived = false; gw.requestTime(receiveTime); lastRequest = now; } // Check if new day has started (hour == 0) and reset day usage counters of meters if (hour()==0 && !newDay){ newDay = true; for (int x = 0; x < NO_METERS; x++){ pulseMeters[x].DayUsageWh = 0 ; // reset daily counters saveMeters(x); // save meter values to EEPROM } } else if(hour() != 0 && newDay) // reset newday flag if hour != 0 { newDay = false;} // Every 10 seconds update one meter to controller to avoid traffic jams if (now-lastSyncKWH > 10000){ // printPulsemeter(updateMeter); sendPowerUpdate(updateMeter); // update the values for currentMeter updateMeter++ ; if (updateMeter >= NO_METERS){ // increment and wrap current meter updateMeter = 0 ;} lastSyncKWH = now ; } // Update sensors every 10 secs if (now-lastUpdate > 10000) { // get values to be displayed from controller lastUpdate = now; } // get readings from serial (sent every 10s) // format {"m":meter,"c":count,"r":rate, "cA":countAccum} // use JSON parser to process (could be replaced by simple split routine, but this works just fine) if(readLineJSON(Serial.read(), json, JSON_LENGHT) > 0 ){ //dummySerial(), Serial.read() // if(readLineJSON(dummySerial(), json, 80) > 0 ){ //dummySerial(), Serial.read() Serial.println(json); storeMeterJSON(json); //store the meter reading //calcMeterTotals(); // update totals } } // This is called when a new time value was received void receiveTime(unsigned long controllerTime) { // Ok, set incoming time Serial.print(F("Time value received: ")); Serial.println(controllerTime); setTime(controllerTime); // set the clock to the time from controller timeReceived = true ; } // This is called when a message is received void incomingMessage(const MyMessage &message) { // Expect few types of messages from controller, V_VAR1 for messages if (message.type==V_TEXT) { // if message comes in, update the kWH reading for meter with value since last update // Write some debug info //Serial.print("Last reading for sensor: "); //Serial.print(message.sensor); //Serial.print(", Message: "); //Serial.println(message.getString()); } } // save Meter to EEPROM when needed void saveMeters(int8_t meterNo){ kWhLong.kWhLongInt = pulseMeters[meterNo].UsageWh ; // convert to separate bytes via struct for (int y = 0; y < 4 ; y++){ gw.saveState(meterNo * 4 + y, kWhLong.kWhLongByte[y]) ; // EEPROM position = meter number * 4 bytes } } void sendPowerUpdate(int meterNo) // Sends update to controller for current meter { gw.send(powerMsg.setSensor(meterNo).set((long)pulseMeters[meterNo].PowerW)); // meterNo * 100 )); gw.send(usageMsg.setSensor(meterNo).set((float)pulseMeters[meterNo].UsageWh/1000L ,3)); // send in kWh! } int storeMeterJSON(char *json) /* convert JSON to values and store in corresponding meter (if used) input: JSON string (can be wrong formatted), with length output: changed meter record number or -1 if error use JsonParser */ { StaticJsonBuffer<50> jsonBuffer; // 4 object -> 4 + 4*10 = 44 // char njson[] = "{\"m\":1,\"c\":12,\"r\":120000,\"cA\":12345}"; JsonObject& root = jsonBuffer.parseObject(json); if (!root.success()) { Serial.println(F("JsonParser.parse() failed")); errCount++ ; return -1; } int m = (long)root["m"]; if (m > NO_METERS){ // meter value out of range for used meters (m starts at 1) return -1 ; } else { // update meter values, Power is momentary, Usage is cumulative long newAccumWh = (long)root["cA"] ; long newWh = (long)root["c"] ; long diffAccumWh = newAccumWh - pulseMeters[m-1].UsageAccumWh; // check for missed pulses by comparing cA with last stored value if (diffAccumWh >= newWh){ // no difference or missed pulses -> correct: add difference pulseMeters[m-1].UsageWh += diffAccumWh; pulseMeters[m-1].DayUsageWh += diffAccumWh; } else { // negative diff, out of sync -> add pulses only (can be out of range or restart) pulseMeters[m-1].UsageWh += newWh; pulseMeters[m-1].DayUsageWh += newWh; } pulseMeters[m-1].UsageAccumWh = newAccumWh; // always update sync counter (only for sync and error correction(serial)) if ((long)root["r"] == 0){ // calculate power from pulse rate (ms) and truncate to whole Watts pulseMeters[m-1].PowerW = 0; // if overflow assume no Usage } else if (pulseMeters[m-1].Type == meter800){ pulseMeters[m-1].PowerW = long( 3600000000L / (long)root["r"]*0.8); // rate in microseconds for 800 pulse/kWh } else if (pulseMeters[m-1].Type == meter1000){ pulseMeters[m-1].PowerW = long( 3600000000L / (long)root["r"]); // rate in microseconds for 1000 pulse/kWh } else if (pulseMeters[m-1].Type == meter2000){ pulseMeters[m-1].PowerW = long( 3600000000L / (long)root["r"]/2); // rate in microseconds for 2000 pulse/kWh } else { Serial.println("geht nicht"); } return m ; } } int readLineJSON(int readch, char *buffer, int len) /* checks for JSON and when started append char tot buffer and checks for line completion usage: static char buffer[80]; if (readline(Serial.read(), buffer, 80) > 0) { // line complete} returns simple JSON */ { static int pos = 0; int rpos; if (readch > 0) { switch (readch) { case '\n': // Ignore new-lines break; case '\r': // Return on CR rpos = pos; pos = 0; // Reset position index ready for next time return rpos; default: if (pos < len-1) { buffer[pos++] = readch; buffer[pos] = 0; } } } // No end of line has been found, so return -1. return -1; } /* int dummySerial() // Acts as a dummy JSON serial character generator for debugging // input: none // output: preset JSON string { static int pos = 0; char json[] = "{\"m\":1,\"c\":12,\"r\":120000,\"cA\":12345}\r{\"m\":2,\"c\":212,\"r\":2120000,\"cA\":212345}\r{\"m\":3,\"c\":212,\"r\":2120000,\"cA\":212345}\n\r"; if (pos++ >= strlen(json)){ pos = 0; } return json[pos] ; } */ /* void printPulsemeter(int meter) // prints the Pulsemeter record to serial out { Serial.print("m:"); Serial.print(meter); Serial.print("type:"); Serial.print(pulseMeters[meter].Type); Serial.print(", power: "); Serial.print(pulseMeters[meter].PowerW); Serial.print(", usage: "); Serial.print(pulseMeters[meter].UsageWh); Serial.print(", day usage: "); Serial.println(pulseMeters[meter].DayUsageWh ); // Serial.print(", Ca: "); // Serial.println(pulseMeters[meter].UsageAccumWh); } */ -
Good evening,
After a couple of weeks, again i'm busy with my arduino's, but now i have a rasberry with domoticz near my arduino, so i don't need to send it wireless.
Is there a possibility to connect the master or slave arduino directly to my rasberry and read out the pulse meters???
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login