Serial gateway with several sensors connected to it
-
@AWI
I just copied all the files in libraries and hardware in the development zip into c:\program files\Arduino\I am trying to get it to run on arduino due and yes I was trying the run the Serial gateway in Library\My Sensor\SerialGateway
-
Hi @skatun did you check this http://www.mysensors.org/about/arduino#installing-the-sensor-libraries ? You install it the same way but download it from https://github.com/mysensors/Arduino (press Download ZIP) and make sure its Branch: Development.
Controller: Proxmox VM - Home Assistant
MySensors GW: Arduino Uno - W5100 Ethernet, Gw Shield Nrf24l01+ 2,4Ghz
MySensors GW: Arduino Uno - Gw Shield RFM69, 433mhz
RFLink GW - Arduino Mega + RFLink Shield, 433mhz -
Hi @skatun did you check this http://www.mysensors.org/about/arduino#installing-the-sensor-libraries ? You install it the same way but download it from https://github.com/mysensors/Arduino (press Download ZIP) and make sure its Branch: Development.
Well I tried to save it both here:
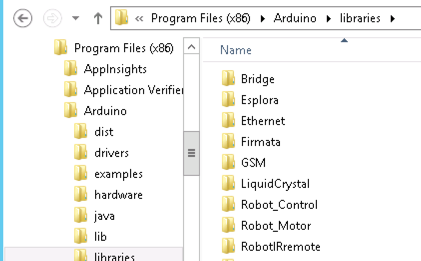
C:\Program Files (x86)\Arduino\libraries\Mysensor
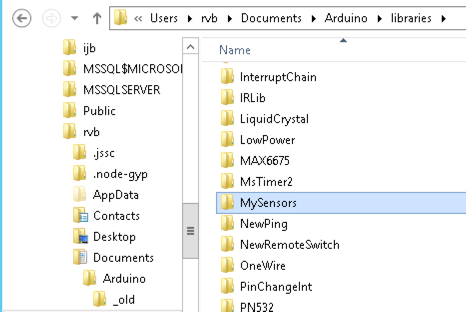
C:\Program Files (x86)\Arduino\hardware\MySensorsAs well as here as described in your link:
C:\Users\kim\Documents\ArduinoBut I get compile errors no matter where I try to compile serialgateway on due which I found in the C:\Program Files (x86)\Arduino\libraries\MySensors\examples\SerialGateway
Cheers
-
@skatun having the files in multiple folders isnt a good idea.
Maybe you should remove the IDE and all folders and start over?Controller: Proxmox VM - Home Assistant
MySensors GW: Arduino Uno - W5100 Ethernet, Gw Shield Nrf24l01+ 2,4Ghz
MySensors GW: Arduino Uno - Gw Shield RFM69, 433mhz
RFLink GW - Arduino Mega + RFLink Shield, 433mhz -
@skatun having the files in multiple folders isnt a good idea.
Maybe you should remove the IDE and all folders and start over?@sundberg84
So the IDE by default get installed C:\Program Files (x86)\Arduino but the files folder get default set to this:C:\Users\kim\Documents\Arduino
I guess arduino made it that way so that you can load examples from C:\Program Files (x86)\Arduino then mess around with them and save them here C:\Users\kim\Documents\Arduino
So I never had duplicate files, i tried both locations without sucsess. So which version of the IDE should I use? 1.6.7 is what I have now.
-
@skatun Dont know if there are any version conflicts at the moment.
I dont have the latest version.Controller: Proxmox VM - Home Assistant
MySensors GW: Arduino Uno - W5100 Ethernet, Gw Shield Nrf24l01+ 2,4Ghz
MySensors GW: Arduino Uno - Gw Shield RFM69, 433mhz
RFLink GW - Arduino Mega + RFLink Shield, 433mhz -
@skatun Dont know if there are any version conflicts at the moment.
I dont have the latest version.@sundberg84
So which directory should i put the files in? BOth hardware and library? -
I install the ide. download and extract mys to same path as ide. That's it.
Controller: Proxmox VM - Home Assistant
MySensors GW: Arduino Uno - W5100 Ethernet, Gw Shield Nrf24l01+ 2,4Ghz
MySensors GW: Arduino Uno - Gw Shield RFM69, 433mhz
RFLink GW - Arduino Mega + RFLink Shield, 433mhz -
I install the ide. download and extract mys to same path as ide. That's it.
-
I will then delete C:\Users\kim\Documents\Arduino which the ide creates.. Will upgrtade today, and let you know how it goes
Default libraries included in the IDE
User libraries
Its not uncommon to have compile issues when:
-
The IDE is not restarted after uncompressing/copy file to the libraries
-
When upgrading MySensors without deleting the old version first
I have Arduino IDE 1.6.4
Cheers
-
-
Default libraries included in the IDE
User libraries
Its not uncommon to have compile issues when:
-
The IDE is not restarted after uncompressing/copy file to the libraries
-
When upgrading MySensors without deleting the old version first
I have Arduino IDE 1.6.4
Cheers
-