Hello,
I am reviving this as I upgraded my kernel to 7.0 and now have communications issues.
I discovered that I had to force port speed when opening it up to the right speed, then it communicates a bit then nothing...
driver is ch341
any idea ?
Nice work @Kokosnoot
I think you could use
#define MY_RFM69_IRQ_PIN 2
#define MY_RFM69_IRQ_NUM digitalPinToInterrupt(MY_RFM69_IRQ_PIN)
This should convert the pin number to interrupt number automatically.
It is the receiver's eeprom that needs to be cleared. In most MySensors networks, the receiver is the gateway. But since MySensors supports node to node communication (for example a button node sending a message to a relay node), any node can be a receiver. So in the example, the eeprom of the relay node would also need to be cleared.
I actually write a non MS sketch first - well for the more complicated things - and when that works I add MS code. That way you can be sure that everything works fine before you enable MS on your node.
@skywatch @sindrome73 This is what I do, too.
Note that it is wait(), which is a MySensors function and not delay(), an Arduino function. wait() checks for MySensors messages, delay() halts all process, thus a message might be missed.
@mfalkvidd A while ago I tinkered with Media Wiki running on a docker. If I remember correctly you can set access for authors moderators etc.
But I forgot, I need to spin that docker up any time soon anyway. Because it contains my network documentation and I need to update it. I'll let you know.
@tnick I know this is an old post, but if it helps you - I've created support for STM32 based on latest STM32duino here. It's currently made to be backward compatible for the existing STM32F1 support, which is what you are struggling. But with a small change you can use the new STM32 HAL support. Let me know if you are interested to give it a try.
The longer term plan is to remove the existing (old) STM32F1 support in favor of the new and more general STM32 support. (If @mfalkvidd agrees ;-))
@Vuinne-Ryvmar You seem to be confused about what this forum is. Maybe you just ended up here on a random Google search?
But in our case on an Arduino, D3 is literally the name for one of the metal legs coming off of the little controller, and we call it a pin sometimes. @tbowmo was looking for how to send the command to turn the power on or off to that part of the board, not a code to enable connecting up a controller to their phone.
I see that a D3 game controller is a thing, but I doubt you will have any luck getting help with that here. It's not what this site is about.
This is what we work with:
[image: ArduinoUnoFront.jpg]
@jaydenlord Probably you do. If you leave the EN floating, electrical noise could cause it to enable or disable randomly.
Some enable pin require a HIGH, some LOW. Connect it to VCC to see if it works more consistently. If it doesn't detect, connect it to GND.
If one of these works, then the part wasn't designed to be in a default state of enable.
Let us know your results (I found this video
OSD
@Eme
Thank you for coming back to report how you solved your problem! Your comments will help other people.
I am a big fan of Frugal Tech and I think MySensors is great for that.
Alas, MySensors is not well supported anymore. Right now I'm having problems linking to the home page :( It's people like you and me that will keep MySensors going.
Thanks for your help.
OSD
https://github.com/mysensors/MySensors/pull/1562 switches to using libgpiod instead of the earlier interface. I have not tested it myself but it looks good.
@mvader Turn the time delay adjustment preset on your PIR module to the minimum.. Now try it.. You will not get a continuous output..Also, prepare the circuit using a long wire from the back to the sensor of your module.
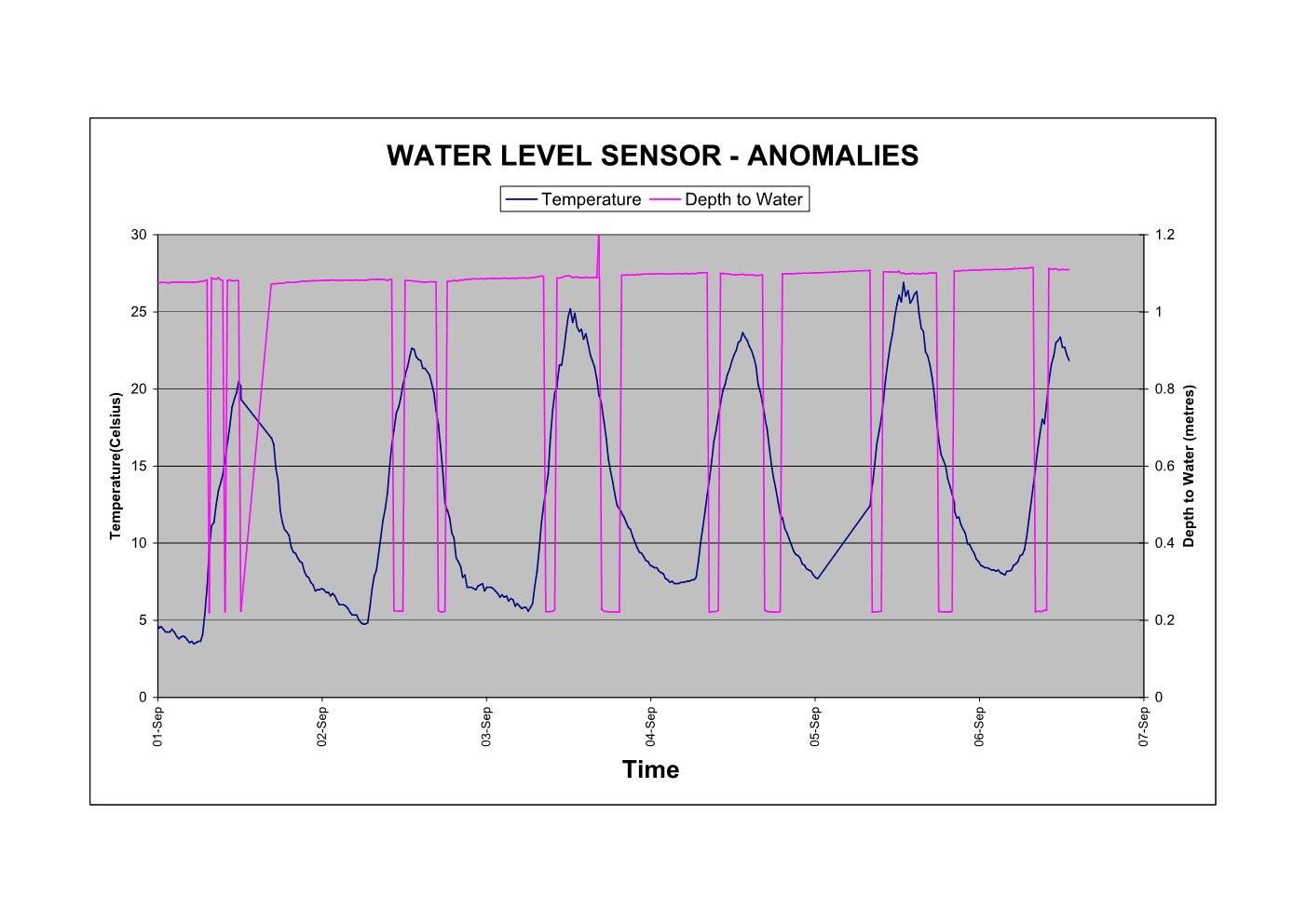
I'm having the same / a simular issue of temperature related readings, but at a different temperature level (for me it must be > 14 degree). I massure the dew point as well (temperature = orange, dew point = yellow). It looks to be more related to water in the air than only to temperature.
@zboblamont have you been finally been able to find a solution?
[image: 1743164554174-6760565c-914c-4608-be1a-6d10d0640e08-ac609c25-78e7-49de-8302-0166a041bff2-resized.png]
Update and problem fixed!
For everybody that will encouter this, the problem was at the sensor side because of the folder of the sensor! We created some metal brackets for it and they where exactly the same diameter. The fact that the mount squeezed the sensor made it return the lowest value.
Just needed to adjust the hole and everything was ok!