Windows GUI/Controller for MySensors
-
My current running setup is a Arduino via USB-Serial attached to a Arduino with my Controller Software. But i want to use this Windows Controller at the same time. Anyone a idea how i can do this (local serial and serial2net at the same time on the same serial device)? if i start the serial2net my raspberry controller is broken and can't connect to the arduino usb serial but the serial2net work.
-
My current running setup is a Arduino via USB-Serial attached to a Arduino with my Controller Software. But i want to use this Windows Controller at the same time. Anyone a idea how i can do this (local serial and serial2net at the same time on the same serial device)? if i start the serial2net my raspberry controller is broken and can't connect to the arduino usb serial but the serial2net work.
-
Thanks @ @tekka I saw the button "gw mode" but pimatic unfortunately only supports serial gateways. so if i use the "gw mode" i need a package like net2ser (instead of ser2net). But i think something like that does not exist
edit:
okay, it works with socatsudo socat -d -d pty,link=/dev/ttyPimaticGW,raw,echo=0,waitslave tcp:192.168.170.32:5003; -
Thanks @ @tekka I saw the button "gw mode" but pimatic unfortunately only supports serial gateways. so if i use the "gw mode" i need a package like net2ser (instead of ser2net). But i think something like that does not exist
edit:
okay, it works with socatsudo socat -d -d pty,link=/dev/ttyPimaticGW,raw,echo=0,waitslave tcp:192.168.170.32:5003; -
@Harrdy I made the experience that a socat tcp tunnel is not stable all the time. I was trying to establish a connection between my ESP8266 gateway and a serial port (to be used with pimatic), but that tended to disconnect after few hours/days. This was also reported by other users in the pimatic forum. But maybe this is only a problem in relation with a ESP gateway.
I would just recommend to check your connection regularly.
If it is also unstable for you, I am testing node-red for that purpose at the moment and it looks promising. I will report when testing is finished. -
Maybe this helps any one else:
I run openHAB on a RPI3 and i have made a Mysensors serial GW on a arduino nano.
I want to use openHAB for the interface and MySController for the managment. So i need to forward my serial communication to a TCP socket.ser2net is a nice tool works fast but it block the Serial connection for openHAB.
socat works better for me by executing the following command:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.locknext step will be to put it in a script and sends the process to the background and restarts it if there went something go's wrong.
-
Maybe this helps any one else:
I run openHAB on a RPI3 and i have made a Mysensors serial GW on a arduino nano.
I want to use openHAB for the interface and MySController for the managment. So i need to forward my serial communication to a TCP socket.ser2net is a nice tool works fast but it block the Serial connection for openHAB.
socat works better for me by executing the following command:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.locknext step will be to put it in a script and sends the process to the background and restarts it if there went something go's wrong.
Does anyone know how to allow multiple TCP connections forwarded to one MYS tty port? This socat command blocks second TCP connection until first one disconnected.
I just want to connect MYSController using TCP without disconnecting my custom MQTT<=>serial controller script. I'm using RPi with USB-serial gateway.
P.S. @tekka is there any chances that MQTT access will be implemented in MYSController?
@techRH said:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.lock
-
Hi all,
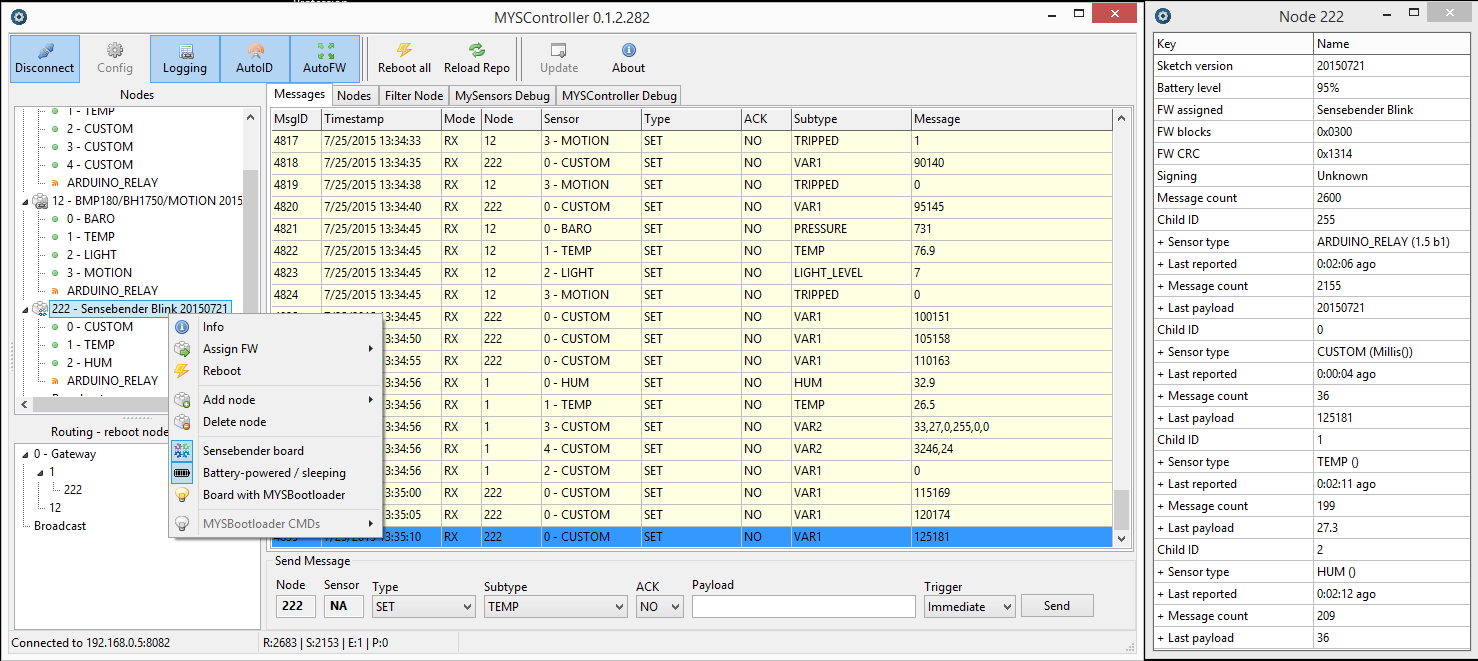
I've been working on this project since some time, basically it's a GUI for controlling/updating/debugging a network of MySensors nodes. OTA functionality is supported via MYSBootloader - read posts for further instructions/troubleshooting or PM.
link updated: MYSController Version 1.0.0.3316 released
New features:
- support OTA FW update Sensebender board
- metric/imperial system I_CONFIG
- save nodes
Update via update button in MYSController or download here.
@tekka great work! thank you for sharing this.
Your controller and great contribution had me quickly started with mysensors. I am interested in a way to do OTA updates using MYSController via api or a script call or even rewriting the logic in an outside code. I'll try to explain the need based on my setup below.Given that I am using jeedom right now as a controller, but sadly it doesn't seem to support yet OTA updates. I'd like to be able to reuse or even contribute to this feature and I'd appreciate pointers to start doing that.
My setup has it that jeedom runs off a raspi and has a mysensors serial gateway attached. (1 to 2 Watts draw for this setup). MYSController can work as an ethernet relay gateway, but if I understand correctly I have to run it on windows (more moving parts), or a much hungrier box than my raspi.Is there a way I can make that work somehow? I am ready and appreciate any type of suggestions with the current setup I have or an evolution which goes into that direction.
-
@robosensor you could try nodered. It can connect multiple inputs (mqtt, tcp,...) and merge it to a single serial output and vice versa. You might have to add some logic, but that shouldn't be a problem.
-
Does anyone know how to allow multiple TCP connections forwarded to one MYS tty port? This socat command blocks second TCP connection until first one disconnected.
I just want to connect MYSController using TCP without disconnecting my custom MQTT<=>serial controller script. I'm using RPi with USB-serial gateway.
P.S. @tekka is there any chances that MQTT access will be implemented in MYSController?
@techRH said:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.lock
@robosensor I wrote a bridge to use on the Linino side of the Arduino Yun for this:
https://github.com/peterdey/Yun-Linino-NewBridgeBut there's no reason you couldn't use this on an rPi - you'll probably just need to turn the baud rate down to 115200.
-
@tekka great work! thank you for sharing this.
Your controller and great contribution had me quickly started with mysensors. I am interested in a way to do OTA updates using MYSController via api or a script call or even rewriting the logic in an outside code. I'll try to explain the need based on my setup below.Given that I am using jeedom right now as a controller, but sadly it doesn't seem to support yet OTA updates. I'd like to be able to reuse or even contribute to this feature and I'd appreciate pointers to start doing that.
My setup has it that jeedom runs off a raspi and has a mysensors serial gateway attached. (1 to 2 Watts draw for this setup). MYSController can work as an ethernet relay gateway, but if I understand correctly I have to run it on windows (more moving parts), or a much hungrier box than my raspi.Is there a way I can make that work somehow? I am ready and appreciate any type of suggestions with the current setup I have or an evolution which goes into that direction.
-
I thought the socat command is to slow in switching so i have created a python script which will readout the mysensors serial GW and sends the data to a virtual serial port to connect to openhab and a TCP socket for the MySensors controller.
https://github.com/Rutger798/serial_to_serial_and_tcp/blob/master/serial_to_serial_and_tcp.py
-
How do i use MYSController with a Raspberry Pi ?
I have a RPi2 with a NRF24 radio as a gateway and want to troubleshoot some communication issues i have been having. I usually log into the RPi2 via ssh to make adjustments.
Can I just download the files and rund the .exe via command-line?Thanks
-
I think it's windows software only. If you want to use it this way you should make you gateway device accessible via ethernet, maybe socat or nodered is an option for you.
-
@Mark-Swift : If you're happy to modify the MySensors library in an unsupported way, I've added a logMessage function to transmit text/debug messages from remote nodes:
https://github.com/peterdey/MySensors-Arduino/commit/f5f339b71620ec3cd896304a2ca6aba40ad40218Found it useful, particularly in conjunction with MYSController OTA firmware updates.
@pdey said:
@Mark-Swift : If you're happy to modify the MySensors library in an unsupported way, I've added a logMessage function to transmit text/debug messages from remote nodes:
https://github.com/peterdey/MySensors-Arduino/commit/f5f339b71620ec3cd896304a2ca6aba40ad40218Found it useful, particularly in conjunction with MYSController OTA firmware updates.
is it possible to use with mysensor 2.0 API ?
-
How do I get MYSController to save info about each node?
I always have to set "battery-powered" after each upload and it does not save sketch name etc. -
Ok this might be a realy stupid question but im what you call a "nuub" ;)
If i want to monitor my current setup (serial gateway on a pi3) on windows/mint. Do i build another gateway and plug it in the pc?
Sorry if i missed the instructions on this