Windows GUI/Controller for MySensors
-
@pdey Let me get this straight, this allows me to see the serial debug messages from my nodes running the modified boot loader? That would be a dream come true, I really miss debug messages...
Thank you!
@Mark-Swift: You'll need to replace Serial.Print with node.logMessage - but yes, I use it for transmitting debug messages, wirelessly, to the controller.
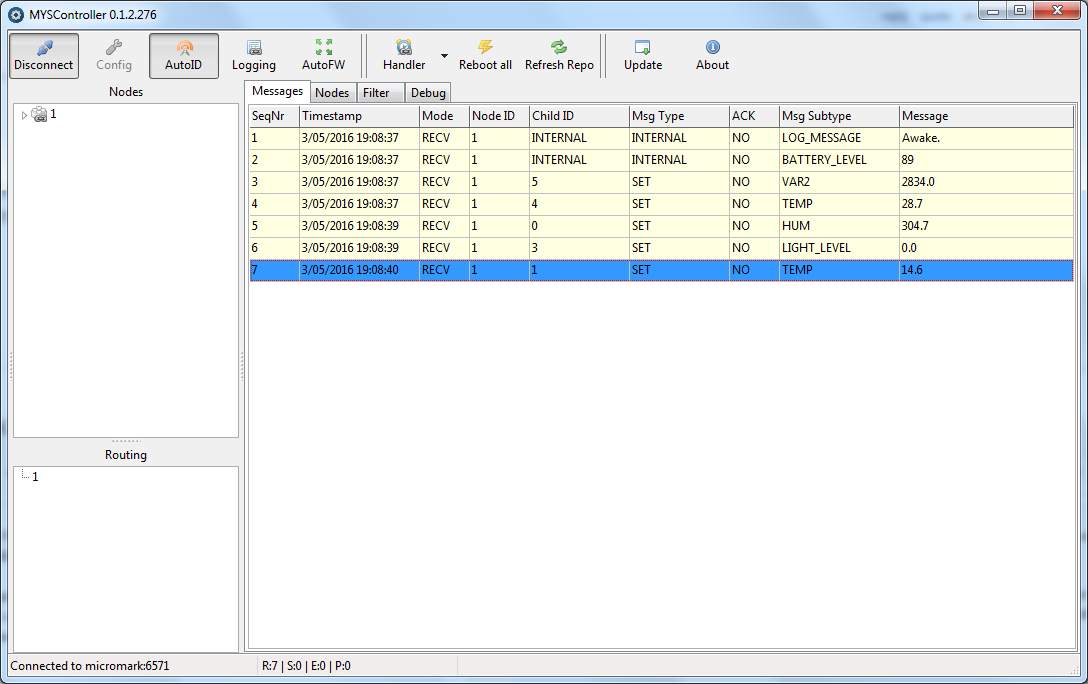
No gateway modifications required (the gateway will just pass the message over to the controller). Old versions of MYSController (e.g. 0.1.2.276) would actually show the debug messages as a LOG_MESSAGE in the "Messages" tab; later versions hide it away in the "Debug" tab.
-
-
Hi @tekka ,
Just starting testing beta version and it looks really nice. Thanks for sharing this great tool.
I usually use it to debug mysensors network.I think I have found a little bug regarding message subtype.
For example, when I choose to send a message using as subtype V_VAR1, it sends out as V_VAR4.
To actually send it as V_VAR1 I have to choose as Subtype V_HVAC_FLOW_STATE.Can someone try this in their MYSController Beta 1.0.0beta so as to verify if it is only happening to me, or is a funny bug in the beta.
Once againg, thank you very much.
Regards.
Gonzalo -
Hi @tekka ,
Just starting testing beta version and it looks really nice. Thanks for sharing this great tool.
I usually use it to debug mysensors network.I think I have found a little bug regarding message subtype.
For example, when I choose to send a message using as subtype V_VAR1, it sends out as V_VAR4.
To actually send it as V_VAR1 I have to choose as Subtype V_HVAC_FLOW_STATE.Can someone try this in their MYSController Beta 1.0.0beta so as to verify if it is only happening to me, or is a funny bug in the beta.
Once againg, thank you very much.
Regards.
Gonzalo@gonzalonal @tekka
Yes I can confirm the exact same behaviour gonzalonal describes. Please say if you need any more details tekka (with the @ function). -
@gonzalonal @tekka
Yes I can confirm the exact same behaviour gonzalonal describes. Please say if you need any more details tekka (with the @ function). -
@Mark-Swift: You'll need to replace Serial.Print with node.logMessage - but yes, I use it for transmitting debug messages, wirelessly, to the controller.
No gateway modifications required (the gateway will just pass the message over to the controller). Old versions of MYSController (e.g. 0.1.2.276) would actually show the debug messages as a LOG_MESSAGE in the "Messages" tab; later versions hide it away in the "Debug" tab.
-
@tekka I've tried to apply @pdey 's change to the current dev branch; but due to the recent refactoring, wasn't successful - I'll keep trying.
Would you happen to have any other suggestions how we can get debug messages back to the controller from remote nodes? Some of my nodes are running some fairly complex code and without debug it becomes a tedious task.
Many thanks in advance,
Mark
-
@tekka I've tried to apply @pdey 's change to the current dev branch; but due to the recent refactoring, wasn't successful - I'll keep trying.
Would you happen to have any other suggestions how we can get debug messages back to the controller from remote nodes? Some of my nodes are running some fairly complex code and without debug it becomes a tedious task.
Many thanks in advance,
Mark
Was @pdey 's change applied to the dev branch?
Any suggestions for debug messages to the controller from remote nodes?
@Mark-Swift said:
@tekka I've tried to apply @pdey 's change to the current dev branch; but due to the recent refactoring, wasn't successful - I'll keep trying.
Would you happen to have any other suggestions how we can get debug messages back to the controller from remote nodes? Some of my nodes are running some fairly complex code and without debug it becomes a tedious task.
Many thanks in advance,
Mark
-
My current running setup is a Arduino via USB-Serial attached to a Arduino with my Controller Software. But i want to use this Windows Controller at the same time. Anyone a idea how i can do this (local serial and serial2net at the same time on the same serial device)? if i start the serial2net my raspberry controller is broken and can't connect to the arduino usb serial but the serial2net work.
-
My current running setup is a Arduino via USB-Serial attached to a Arduino with my Controller Software. But i want to use this Windows Controller at the same time. Anyone a idea how i can do this (local serial and serial2net at the same time on the same serial device)? if i start the serial2net my raspberry controller is broken and can't connect to the arduino usb serial but the serial2net work.
-
Thanks @ @tekka I saw the button "gw mode" but pimatic unfortunately only supports serial gateways. so if i use the "gw mode" i need a package like net2ser (instead of ser2net). But i think something like that does not exist
edit:
okay, it works with socatsudo socat -d -d pty,link=/dev/ttyPimaticGW,raw,echo=0,waitslave tcp:192.168.170.32:5003; -
Thanks @ @tekka I saw the button "gw mode" but pimatic unfortunately only supports serial gateways. so if i use the "gw mode" i need a package like net2ser (instead of ser2net). But i think something like that does not exist
edit:
okay, it works with socatsudo socat -d -d pty,link=/dev/ttyPimaticGW,raw,echo=0,waitslave tcp:192.168.170.32:5003; -
@Harrdy I made the experience that a socat tcp tunnel is not stable all the time. I was trying to establish a connection between my ESP8266 gateway and a serial port (to be used with pimatic), but that tended to disconnect after few hours/days. This was also reported by other users in the pimatic forum. But maybe this is only a problem in relation with a ESP gateway.
I would just recommend to check your connection regularly.
If it is also unstable for you, I am testing node-red for that purpose at the moment and it looks promising. I will report when testing is finished. -
Maybe this helps any one else:
I run openHAB on a RPI3 and i have made a Mysensors serial GW on a arduino nano.
I want to use openHAB for the interface and MySController for the managment. So i need to forward my serial communication to a TCP socket.ser2net is a nice tool works fast but it block the Serial connection for openHAB.
socat works better for me by executing the following command:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.locknext step will be to put it in a script and sends the process to the background and restarts it if there went something go's wrong.
-
Maybe this helps any one else:
I run openHAB on a RPI3 and i have made a Mysensors serial GW on a arduino nano.
I want to use openHAB for the interface and MySController for the managment. So i need to forward my serial communication to a TCP socket.ser2net is a nice tool works fast but it block the Serial connection for openHAB.
socat works better for me by executing the following command:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.locknext step will be to put it in a script and sends the process to the background and restarts it if there went something go's wrong.
Does anyone know how to allow multiple TCP connections forwarded to one MYS tty port? This socat command blocks second TCP connection until first one disconnected.
I just want to connect MYSController using TCP without disconnecting my custom MQTT<=>serial controller script. I'm using RPi with USB-serial gateway.
P.S. @tekka is there any chances that MQTT access will be implemented in MYSController?
@techRH said:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.lock
-
Hi all,
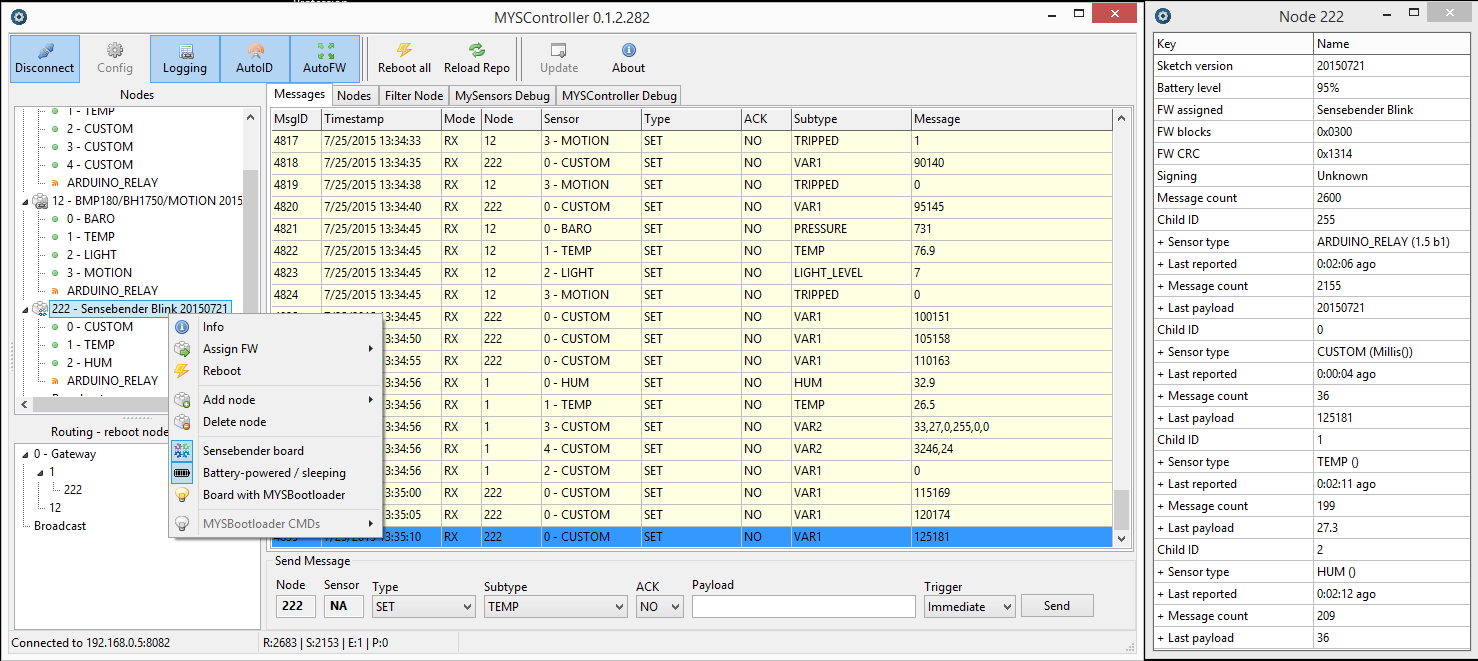
I've been working on this project since some time, basically it's a GUI for controlling/updating/debugging a network of MySensors nodes. OTA functionality is supported via MYSBootloader - read posts for further instructions/troubleshooting or PM.
link updated: MYSController Version 1.0.0.3316 released
New features:
- support OTA FW update Sensebender board
- metric/imperial system I_CONFIG
- save nodes
Update via update button in MYSController or download here.
@tekka great work! thank you for sharing this.
Your controller and great contribution had me quickly started with mysensors. I am interested in a way to do OTA updates using MYSController via api or a script call or even rewriting the logic in an outside code. I'll try to explain the need based on my setup below.Given that I am using jeedom right now as a controller, but sadly it doesn't seem to support yet OTA updates. I'd like to be able to reuse or even contribute to this feature and I'd appreciate pointers to start doing that.
My setup has it that jeedom runs off a raspi and has a mysensors serial gateway attached. (1 to 2 Watts draw for this setup). MYSController can work as an ethernet relay gateway, but if I understand correctly I have to run it on windows (more moving parts), or a much hungrier box than my raspi.Is there a way I can make that work somehow? I am ready and appreciate any type of suggestions with the current setup I have or an evolution which goes into that direction.
-
@robosensor you could try nodered. It can connect multiple inputs (mqtt, tcp,...) and merge it to a single serial output and vice versa. You might have to add some logic, but that shouldn't be a problem.
-
Does anyone know how to allow multiple TCP connections forwarded to one MYS tty port? This socat command blocks second TCP connection until first one disconnected.
I just want to connect MYSController using TCP without disconnecting my custom MQTT<=>serial controller script. I'm using RPi with USB-serial gateway.
P.S. @tekka is there any chances that MQTT access will be implemented in MYSController?
@techRH said:
$ sudo socat tcp-l:5003,reuseaddr,fork file:/dev/mySensorsCOM,nonblock,waitlock=/var/run/mySensorsCOM.lock
@robosensor I wrote a bridge to use on the Linino side of the Arduino Yun for this:
https://github.com/peterdey/Yun-Linino-NewBridgeBut there's no reason you couldn't use this on an rPi - you'll probably just need to turn the baud rate down to 115200.
-
@tekka great work! thank you for sharing this.
Your controller and great contribution had me quickly started with mysensors. I am interested in a way to do OTA updates using MYSController via api or a script call or even rewriting the logic in an outside code. I'll try to explain the need based on my setup below.Given that I am using jeedom right now as a controller, but sadly it doesn't seem to support yet OTA updates. I'd like to be able to reuse or even contribute to this feature and I'd appreciate pointers to start doing that.
My setup has it that jeedom runs off a raspi and has a mysensors serial gateway attached. (1 to 2 Watts draw for this setup). MYSController can work as an ethernet relay gateway, but if I understand correctly I have to run it on windows (more moving parts), or a much hungrier box than my raspi.Is there a way I can make that work somehow? I am ready and appreciate any type of suggestions with the current setup I have or an evolution which goes into that direction.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login