@chabo_mq Could this possibly be an IR light barrier?
Global Moderators
Private
Forum wide moderators
Posts
-
Unknown Sensor -
How to drill 1mm diameter holes? My drills won't even hold the bit!@monte Thank you for sharing, just ordered the bits.
-
GSM MQTT gateway. Can we update the TinyGSM library used?@NielBierman Thank you for pointing out that the latest TinyGSM library also supports more modern GSM chips.
I don't have a GSM module myself and no experience with it. But it would be good if you could put an issue in the MySensors GitHub repository.
It would be even better if you could post your solution with the updated TinyGSM library as a pull request to the repository development branch.
Many thanks - Immo
-
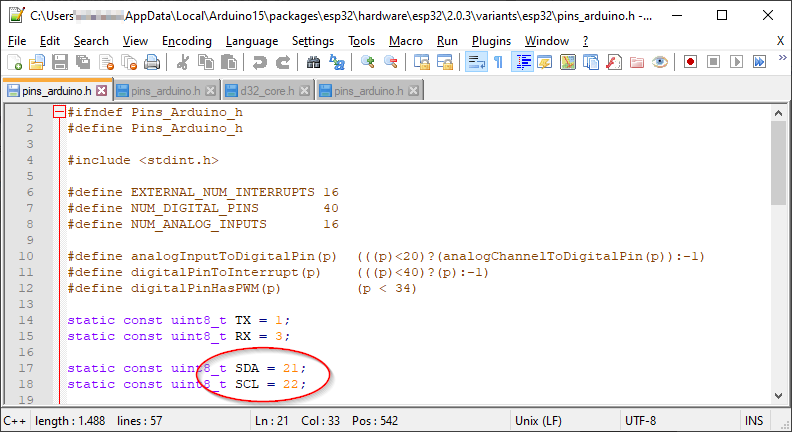
Bootloading a barebones arduino
Uploaded with Crome and copied from clipboard. -
CAN bus transport implementationIn logic analyser it looks like this:
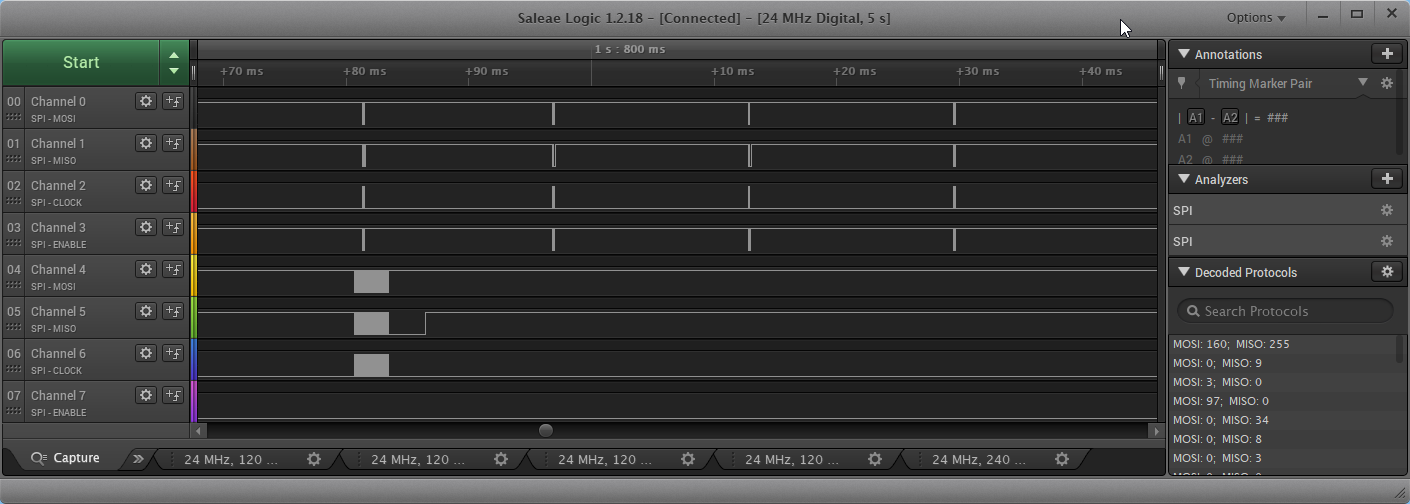
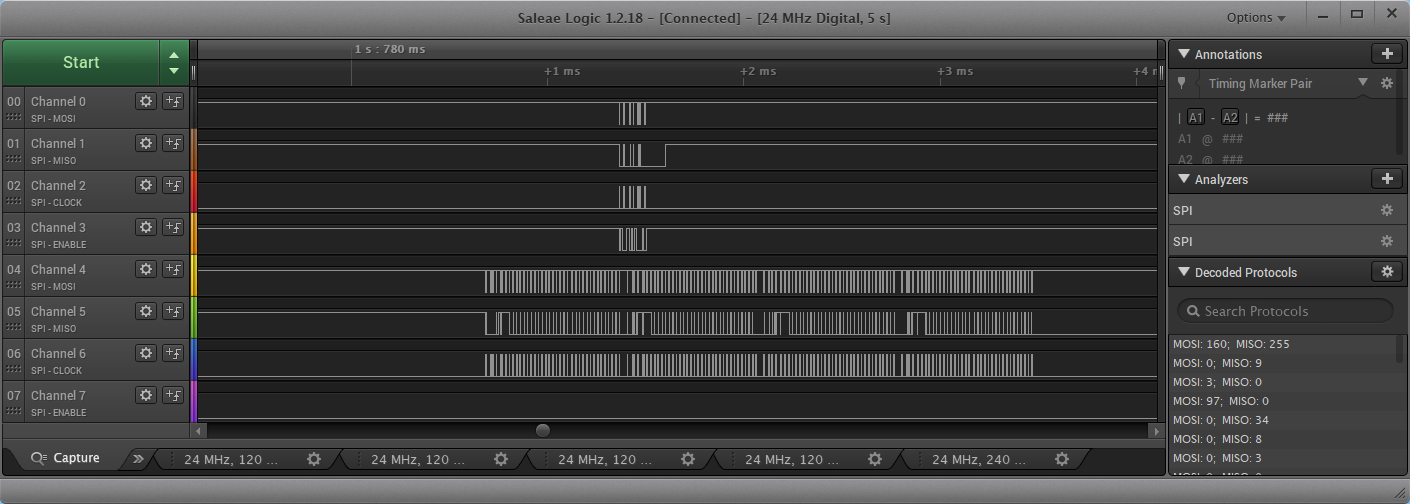
Upper 4 channels are from node, lower ones are from gateway.Close up from gateway send (4 packets):
-
CAN bus transport implementation@Adam-Slowik, @JeeLet Ok, with the both sketches it works with some limitations.
Nice work so far - thank you for contributing!I have done some modifications in the CAN transport files.
@Adam-Slowik I would like to create a PR in your forked repo. Then we can discuss the code changes in GitHub. Would that be Ok for you - do you have time for this?One limitation I found so far are long MyMessages. They can be up to 32 byte - which results in up to 4 CAN-Bus sub telegrams. When I send 32 byte message I observed the sub telegrams do not always arrive in send order in MyTransportCAN.cpp like this:
19916 CAN:RCV:CANH=2202010368,ID=3,TOTAL=4,CURR=0,TO=3,FROM=0 19921 CAN:RCV:LN=8,DTA0=0,DTA1=0,DTA2=3,DTA3=202,DTA4=9,DTA5=2,DTA6=0,DTA7=49 19929 CAN:RCV:SLOT=0,PART=1 19932 CAN:RCV:CANH=2202075904,ID=3,TOTAL=4,CURR=1,TO=3,FROM=0 19937 CAN:RCV:LN=8,DTA0=50,DTA1=51,DTA2=52,DTA3=53,DTA4=54,DTA5=55,DTA6=56,DTA7=57 19945 CAN:RCV:SLOT=0,PART=2 19947 CAN:RCV:CANH=2202206976,ID=3,TOTAL=4,CURR=3,TO=3,FROM=0 19953 CAN:RCV:LN=8,DTA0=56,DTA1=57,DTA2=48,DTA3=49,DTA4=50,DTA5=51,DTA6=52,DTA7=53 19960 !CAN:RCV:proper slot not found 19964 CAN:RCV:CANH=2202141440,ID=3,TOTAL=4,CURR=2,TO=3,FROM=0 19970 CAN:RCV:LN=8,DTA0=48,DTA1=49,DTA2=50,DTA3=51,DTA4=52,DTA5=53,DTA6=54,DTA7=55 19978 CAN:RCV:SLOT=0,PART=3Sub telegram 3 arrives before 2.
I'm afraid the function _findCanPacketSlot() needs an update to handle this.
@Adam-Slowik Do you see a chance for you to update the logic next time?Other limitation I see is the limited CAN telegram buffer of 3 packets in the MCP2515 module. I'm afraid for reliable operation with MySensors a change from polling to interrupt mode is required.
But this can be done later, after the fix for the PacketSlot logic. -
CAN bus transport implementationwhat do you want me to test ????
bool transportSanityCheck(void) { return (CAN0.getError()==CAN_OK) }The "radio guy" opinion would be great.
((I'll look for possible help ). )I'm not a "radio guy", but I think this code change looks fine. When sanity check fails then MySensors core calls transportInit() which would try to re-initialise the MCP2515 module.
In my setup with only 2 CAN modules I'm afraid this will always return CAN_OK. So no idea how to check this. May be unplug the both CAN wires?
-
BME 280 pinout reversed... -
CAN bus transport implementation@Adam-Slowik, @JeeLet
Ok, I will give CAN-Bus a try. This is my test setup: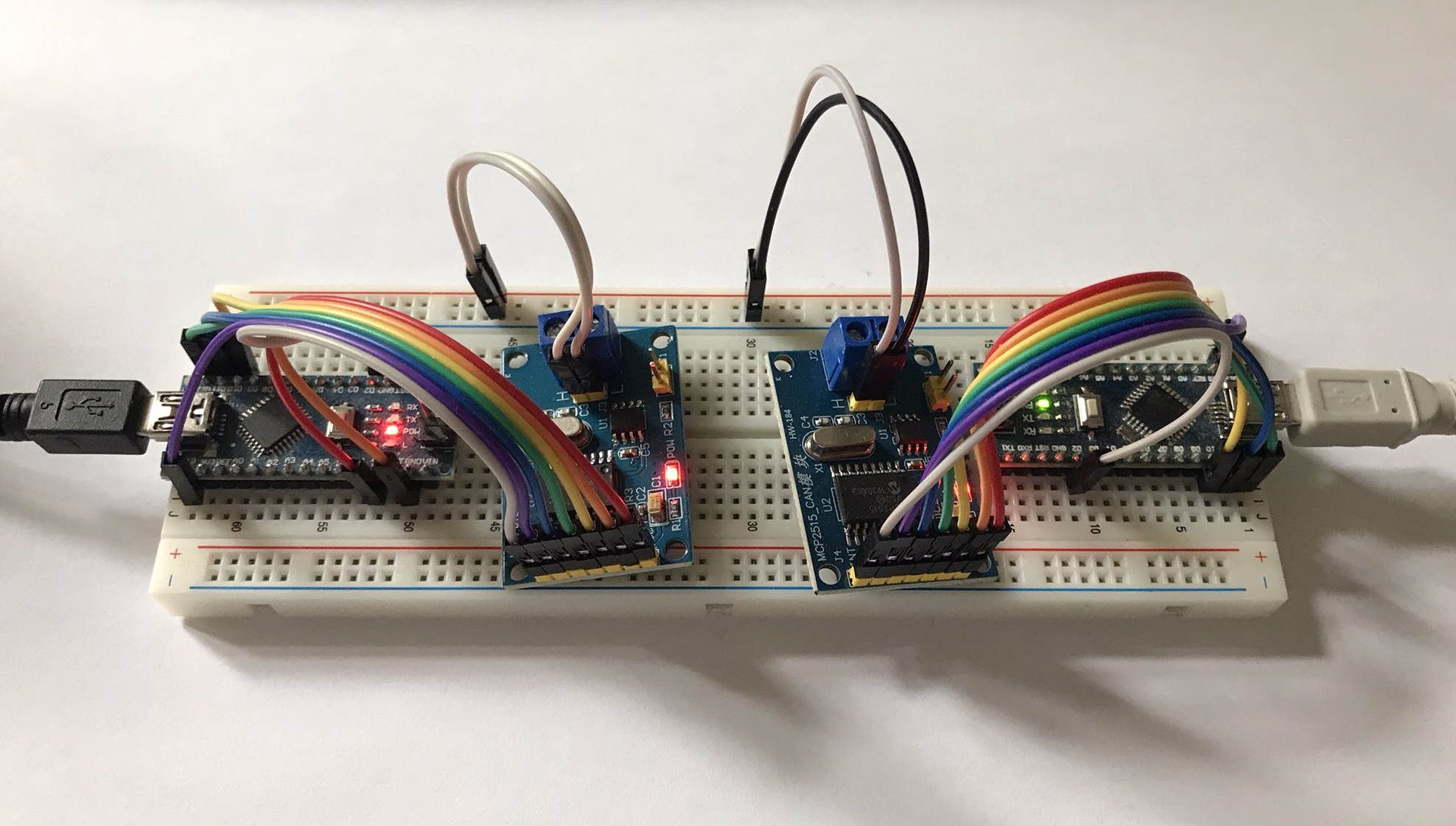
I will use the demo sketches from Adam's fork. Let you know how it works for me.