@m26872
Hi there,
im still into troubleshooting, and what i did last was create a "mock up temperatursensor slim node " with this sketch
, so its really only the node and batteries. But it still freezes :(
Hardware i use is :
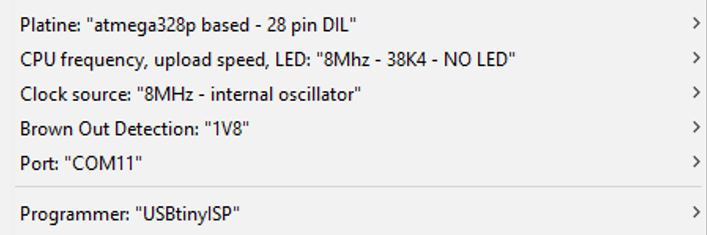
-Atmega328p 1Mhz bootloader. // Burnt the bootloader with one Arduino UNO as master and another Arduino UNO on which I replaced the Atmega328p as slave // Arduino as ISP // with the latest Arduino IDE (1.8.2)
- after burning the bootloader on the bare ATMEGA´s i assemble them on the node and transfer the sketch via FTDI232
Furthermore i use
-generic Capacitors and restistors ( specs from your BOM)
- Kuman nRF24L01 batches ( bought like 30 in a bulk once, but other "nonslimnodes" are working)
-fresh batteries
Any help is very aprreciated :) :)
/*
* MockMySensors
*
* This skecth is intended to crate fake sensors which register and respond to the controller
* ***
* Barduino 2015, GizMoCuz 2015
*/
// Enable debug prints to serial monitor
#define MY_DEBUG
// Enable and select radio type attached
#define MY_RADIO_NRF24
//#define MY_RADIO_RFM69
#define MY_NODE_ID 123
#include <MySensors.h>
#define RADIO_ERROR_LED_PIN 4 // Error led pin
#define RADIO_RX_LED_PIN 6 // Receive led pin
#define RADIO_TX_LED_PIN 13 // the PCB, on board LED
// Wait times
#define LONG_WAIT 500
#define SHORT_WAIT 50
#define SKETCH_NAME "MockMySensors "
#define SKETCH_VERSION "v0.5"
// Define Sensors ids
/* S_DOOR, S_MOTION, S_SMOKE, S_LIGHT, S_DIMMER, S_COVER, S_TEMP, S_HUM, S_BARO, S_WIND,
S_RAIN, S_UV, S_WEIGHT, S_POWER, S_HEATER, S_DISTANCE, S_LIGHT_LEVEL, S_ARDUINO_NODE,
S_ARDUINO_REPEATER_NODE, S_LOCK, S_IR, S_WATER, S_AIR_QUALITY, S_CUSTOM, S_DUST,
S_SCENE_CONTROLLER
*/
////#define ID_S_ARDUINO_NODE //auto defined in initialization
////#define ID_S_ARDUINO_REPEATER_NODE //auto defined in initialization
// Some of these ID's have not been updated for v1.5. Uncommenting too many of them
// will make the sketch too large for a pro mini's memory so it's probably best to try
// one at a time.
//#define ID_S_ARMED 0 // dummy to controll armed stated for several sensors
//#define ID_S_DOOR 1
//#define ID_S_MOTION 2
//#define ID_S_SMOKE 3
//#define ID_S_LIGHT 4
//#define ID_S_DIMMER 5
//#define ID_S_COVER 6
#define ID_S_TEMP 7
//#define ID_S_HUM 8
//#define ID_S_BARO 9
//#define ID_S_WIND 10
//#define ID_S_RAIN 11
//#define ID_S_UV 12
//#define ID_S_WEIGHT 13
//#define ID_S_POWER 14
//#define ID_S_HEATER 15
//#define ID_S_DISTANCE 16
//#define ID_S_LIGHT_LEVEL 17
//#define ID_S_LOCK 18
//#define ID_S_IR 19
//#define ID_S_WATER 20
//#define ID_S_AIR_QUALITY 21
//#define ID_S_DUST 22
//#define ID_S_SCENE_CONTROLLER 23
//// Lib 1.5 sensors
//#define ID_S_RGB_LIGHT 24
//#define ID_S_RGBW_LIGHT 25
//#define ID_S_COLOR_SENSOR 26
//#define ID_S_HVAC 27
//#define ID_S_MULTIMETER 28
//#define ID_S_SPRINKLER 29
//#define ID_S_WATER_LEAK 30
//#define ID_S_SOUND 31
//#define ID_S_VIBRATION 32
//#define ID_S_MOISTURE 33
//
//#define ID_S_CUSTOM 99
// Global Vars
unsigned long SLEEP_TIME = 60000; // Sleep time between reads (in milliseconds)
bool metric = true;
long randNumber;
//Instanciate Messages objects
#ifdef ID_S_ARMED
bool isArmed;
#endif
#ifdef ID_S_DOOR // V_TRIPPED, V_ARMED
MyMessage msg_S_DOOR_T(ID_S_DOOR,V_TRIPPED);
MyMessage msg_S_DOOR_A(ID_S_DOOR,V_ARMED);
#endif
#ifdef ID_S_MOTION // V_TRIPPED, V_ARMED
MyMessage msg_S_MOTION_A(ID_S_MOTION,V_ARMED);
MyMessage msg_S_MOTION_T(ID_S_MOTION,V_TRIPPED);
#endif
#ifdef ID_S_SMOKE // V_TRIPPED, V_ARMED
MyMessage msg_S_SMOKE_T(ID_S_SMOKE,V_TRIPPED);
MyMessage msg_S_SMOKE_A(ID_S_SMOKE,V_ARMED);
#endif
#ifdef ID_S_LIGHT
MyMessage msg_S_LIGHT(ID_S_LIGHT,V_LIGHT);
bool isLightOn=0;
#endif
#ifdef ID_S_DIMMER
MyMessage msg_S_DIMMER(ID_S_DIMMER,V_DIMMER);
int dimmerVal=100;
#endif
#ifdef ID_S_COVER
MyMessage msg_S_COVER_U(ID_S_COVER,V_UP);
MyMessage msg_S_COVER_D(ID_S_COVER,V_DOWN);
MyMessage msg_S_COVER_S(ID_S_COVER,V_STOP);
MyMessage msg_S_COVER_V(ID_S_COVER,V_VAR1);
int coverState=0; //0=Stop; 1=up; -1=down
#endif
#ifdef ID_S_TEMP
MyMessage msg_S_TEMP(ID_S_TEMP,V_TEMP);
#endif
#ifdef ID_S_HUM
MyMessage msg_S_HUM(ID_S_HUM,V_HUM);
#endif
#ifdef ID_S_BARO
MyMessage msg_S_BARO_P(ID_S_BARO,V_PRESSURE);
MyMessage msg_S_BARO_F(ID_S_BARO,V_FORECAST);
#endif
#ifdef ID_S_WIND
MyMessage msg_S_WIND_S(ID_S_WIND,V_WIND);
MyMessage msg_S_WIND_G(ID_S_WIND,V_GUST);
MyMessage msg_S_WIND_D(ID_S_WIND,V_DIRECTION);
#endif
#ifdef ID_S_RAIN
MyMessage msg_S_RAIN_A(ID_S_RAIN,V_RAIN);
MyMessage msg_S_RAIN_R(ID_S_RAIN,V_RAINRATE);
#endif
#ifdef ID_S_UV
MyMessage msg_S_UV(ID_S_UV,V_UV);
#endif
#ifdef ID_S_WEIGHT
MyMessage msg_S_WEIGHT(ID_S_WEIGHT,V_WEIGHT);
#endif
#ifdef ID_S_POWER
MyMessage msg_S_POWER_W(ID_S_POWER,V_WATT);
MyMessage msg_S_POWER_K(ID_S_POWER,V_KWH);
#endif
#ifdef ID_S_HEATER
//////// REVIEW IMPLEMENTATION ////////////
MyMessage msg_S_HEATER_SET_POINT(ID_S_HEATER,
V_HVAC_SETPOINT_HEAT); // HVAC/Heater setpoint (Integer between 0-100). S_HEATER, S_HVAC
MyMessage msg_S_HEATER_FLOW_STATE(ID_S_HEATER,
V_HVAC_FLOW_STATE); // Mode of header. One of "Off", "HeatOn", "CoolOn", or "AutoChangeOver" // S_HVAC, S_HEATER
//MyMessage msg_S_HEATER_STATUS(ID_S_HEATER,V_STATUS);
//MyMessage msg_S_HEATER_TEMP(ID_S_HEATER,V_TEMP);
float heater_setpoint=21.5;
String heater_flow_state="Off";
// float heater_temp=23.5;
// bool heater_status=false;
// V_TEMP // Temperature
// V_STATUS // Binary status. 0=off 1=on
// V_HVAC_FLOW_STATE // Mode of header. One of "Off", "HeatOn", "CoolOn", or "AutoChangeOver"
// V_HVAC_SPEED // HVAC/Heater fan speed ("Min", "Normal", "Max", "Auto")
// V_HVAC_SETPOINT_HEAT // HVAC/Heater setpoint
#endif
#ifdef ID_S_DISTANCE
MyMessage msg_S_DISTANCE(ID_S_DISTANCE,V_DISTANCE);
#endif
#ifdef ID_S_LIGHT_LEVEL
MyMessage msg_S_LIGHT_LEVEL(ID_S_LIGHT_LEVEL,V_LIGHT_LEVEL);
#endif
#ifdef ID_S_LOCK
MyMessage msg_S_LOCK(ID_S_LOCK,V_LOCK_STATUS);
bool isLocked = 0;
#endif
#ifdef ID_S_IR
MyMessage msg_S_IR_S(ID_S_IR,V_IR_SEND);
MyMessage msg_S_IR_R(ID_S_IR,V_IR_RECEIVE);
long irVal = 0;
#endif
#ifdef ID_S_WATER
MyMessage msg_S_WATER_F(ID_S_WATER,V_FLOW);
MyMessage msg_S_WATER_V(ID_S_WATER,V_VOLUME);
#endif
#ifdef ID_S_AIR_QUALITY
MyMessage msg_S_AIR_QUALITY(ID_S_AIR_QUALITY,V_LEVEL);
#endif
#ifdef ID_S_DUST
MyMessage msg_S_DUST(ID_S_DUST,V_LEVEL);
#endif
#ifdef ID_S_SCENE_CONTROLLER
MyMessage msg_S_SCENE_CONTROLLER_ON(ID_S_SCENE_CONTROLLER,V_SCENE_ON);
MyMessage msg_S_SCENE_CONTROLLER_OF(ID_S_SCENE_CONTROLLER,V_SCENE_OFF);
// not sure if scene controller sends int or chars
// betting on ints as Touch Display Scen by Hek // compiler warnings
char *scenes[] = {
(char *)"Good Morning",
(char *)"Clean Up!",
(char *)"All Lights Off",
(char *)"Music On/Off"
};
int sceneVal=0;
int sceneValPrevious=0;
#endif
#ifdef ID_S_RGB_LIGHT
MyMessage msg_S_RGB_LIGHT_V_RGB(ID_S_RGB_LIGHT,V_RGB);
MyMessage msg_S_RGB_LIGHT_V_WATT(ID_S_RGB_LIGHT,V_WATT);
String rgbState="000000";
//RGB light V_RGB, V_WATT
//RGB value transmitted as ASCII hex string (I.e "ff0000" for red)
#endif
#ifdef ID_S_RGBW_LIGHT
MyMessage msg_S_RGBW_LIGHT_V_RGBW(ID_S_RGBW_LIGHT,V_RGBW);
MyMessage msg_S_RGBW_LIGHT_V_WATT(ID_S_RGBW_LIGHT,V_WATT);
String rgbwState="00000000";
//RGBW light (with separate white component) V_RGBW, V_WATT
//RGBW value transmitted as ASCII hex string (I.e "ff0000ff" for red + full white) S_RGBW_LIGHT
#endif
#ifdef ID_S_COLOR_SENSOR
MyMessage msg_S_COLOR_SENSOR_V_RGB(ID_S_COLOR_SENSOR,V_RGB);
//Color sensor V_RGB
//RGB value transmitted as ASCII hex string (I.e "ff0000" for red) S_RGB_LIGHT, S_COLOR_SENSOR
#endif
#ifdef ID_S_HVAC
MyMessage msg_S_HVAC_V_HVAC_SETPOINT_HEAT(ID_S_HVAC,V_HVAC_SETPOINT_HEAT);
MyMessage msg_S_HVAC_V_HVAC_SETPOINT_COOL(ID_S_HVAC,V_HVAC_SETPOINT_COOL);
MyMessage msg_S_HVAC_V_HVAC_FLOW_STATET(ID_S_HVAC,V_HVAC_FLOW_STATE);
MyMessage msg_S_HVAC_V_HVAC_FLOW_MODE(ID_S_HVAC,V_HVAC_FLOW_MODE);
MyMessage msg_S_HVAC_V_HVAC_SPEED(ID_S_HVAC,V_HVAC_SPEED);
float hvac_SetPointHeat = 16.5;
float hvac_SetPointCool = 25.5;
String hvac_FlowState = "AutoChangeOver";
String hvac_FlowMode = "Auto";
String hvac_Speed = "Normal";
//Thermostat/HVAC device
//V_HVAC_SETPOINT_HEAT, // HVAC/Heater setpoint
//V_HVAC_SETPOINT_COOL, // HVAC cold setpoint
//V_HVAC_FLOW_STATE, // Mode of header. One of "Off", "HeatOn", "CoolOn", or "AutoChangeOver"
//V_HVAC_FLOW_MODE, // Flow mode for HVAC ("Auto", "ContinuousOn", "PeriodicOn")
//V_HVAC_SPEED // HVAC/Heater fan speed ("Min", "Normal", "Max", "Auto")
// NOT IMPLEMENTED YET
//V_TEMP // Temperature
//V_STATUS // Binary status. 0=off 1=on
#endif
#ifdef ID_S_MULTIMETER
MyMessage msg_S_MULTIMETER_V_IMPEDANCE(ID_S_MULTIMETER,V_IMPEDANCE);
MyMessage msg_S_MULTIMETER_V_VOLTAGE(ID_S_MULTIMETER,V_VOLTAGE);
MyMessage msg_S_MULTIMETER_V_CURRENT(ID_S_MULTIMETER,V_CURRENT);
// Multimeter device V_VOLTAGE, V_CURRENT, V_IMPEDANCE
// V_IMPEDANCE 14 Impedance value
// V_VOLTAGE 38 Voltage level
// V_CURRENT 39 Current level
#endif
#ifdef ID_S_SPRINKLER
// S_SPRINKLER 31 Sprinkler device V_STATUS (turn on/off), V_TRIPPED (if fire detecting device)
// V_STATUS 2 Binary status. 0=off 1=on
// V_ARMED 15 Armed status of a security sensor. 1=Armed, 0=Bypassed
// V_TRIPPED 16 Tripped status of a security sensor. 1=Tripped, 0=Untripped
#endif
#ifdef ID_S_WATER_LEAK
#endif
#ifdef ID_S_SOUND
#endif
#ifdef ID_S_VIBRATION
#endif
#ifdef ID_S_MOISTURE
#endif
#ifdef ID_S_MOISTURE
MyMessage msg_S_MOISTURE(ID_S_MOISTURE,V_LEVEL);
#endif
#ifdef ID_S_CUSTOM
MyMessage msg_S_CUSTOM_1(ID_S_CUSTOM,V_VAR1);
MyMessage msg_S_CUSTOM_2(ID_S_CUSTOM,V_VAR2);
MyMessage msg_S_CUSTOM_3(ID_S_CUSTOM,V_VAR3);
MyMessage msg_S_CUSTOM_4(ID_S_CUSTOM,V_VAR4);
MyMessage msg_S_CUSTOM_5(ID_S_CUSTOM,V_VAR5);
#endif
void setup()
{
// Random SEED
randomSeed(analogRead(0));
wait(LONG_WAIT);
Serial.println("GW Started");
}
void presentation()
{
// Send the Sketch Version Information to the Gateway
Serial.print("Send Sketch Info: ");
sendSketchInfo(SKETCH_NAME, SKETCH_VERSION);
Serial.print(SKETCH_NAME);
Serial.println(SKETCH_VERSION);
wait(LONG_WAIT);
// Get controller configuration
Serial.print("Get Config: ");
metric = getControllerConfig().isMetric;
Serial.println(metric ? "Metric":"Imperial");
wait(LONG_WAIT);
// Init Armed
#ifdef ID_S_ARMED
isArmed = true;
#endif
// Register all sensors to gw (they will be created as child devices)
Serial.println("Presenting Nodes");
Serial.println("________________");
#ifdef ID_S_DOOR
Serial.println(" S_DOOR");
present(ID_S_DOOR,S_DOOR,"Outside Door");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_MOTION
Serial.println(" S_MOTION");
present(ID_S_MOTION,S_MOTION,"Outside Motion");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_SMOKE
Serial.println(" S_SMOKE");
present(ID_S_SMOKE,S_SMOKE,"Kitchen Smoke");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_LIGHT
Serial.println(" S_LIGHT");
present(ID_S_LIGHT,S_LIGHT,"Hall Light");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_DIMMER
Serial.println(" S_DIMMER");
present(ID_S_DIMMER,S_DIMMER,"Living room dimmer");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_COVER
Serial.println(" S_COVER");
present(ID_S_COVER,S_COVER,"Window cover");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_TEMP
Serial.println(" S_TEMP");
present(ID_S_TEMP,S_TEMP,"House Temperarue");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_HUM
Serial.println(" S_HUM");
present(ID_S_HUM,S_HUM,"Current Humidity");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_BARO
Serial.println(" S_BARO");
present(ID_S_BARO,S_BARO," Air pressure");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_WIND
Serial.println(" S_WIND");
present(ID_S_WIND,S_WIND,"Wind Station");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_RAIN
Serial.println(" S_RAIN");
present(ID_S_RAIN,S_RAIN,"Rain Station");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_UV
Serial.println(" S_UV");
present(ID_S_UV,S_UV,"Ultra Violet");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_WEIGHT
Serial.println(" S_WEIGHT");
present(ID_S_WEIGHT,S_WEIGHT,"Outdoor Scale");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_POWER
Serial.println(" S_POWER");
present(ID_S_POWER,S_POWER,"Power Metric");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_HEATER
Serial.println(" S_HEATER");
present(ID_S_HEATER,S_HEATER,"Garage Heater");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_DISTANCE
Serial.println(" S_DISTANCE");
present(ID_S_DISTANCE,S_DISTANCE,"Distance Measure");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_LIGHT_LEVEL
Serial.println(" S_LIGHT_LEVEL");
present(ID_S_LIGHT_LEVEL,S_LIGHT_LEVEL,"Outside Light Level");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_LOCK
Serial.println(" S_LOCK");
present(ID_S_LOCK,S_LOCK,"Front Door Lock");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_IR
Serial.println(" S_IR");
present(ID_S_IR,S_IR,"Univeral Command");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_WATER
Serial.println(" S_WATER");
present(ID_S_WATER,S_WATER,"Water Level");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_AIR_QUALITY
Serial.println(" S_AIR_QUALITY");
present(ID_S_AIR_QUALITY,S_AIR_QUALITY,"Air Station");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_DUST
Serial.println(" S_DUST");
present(ID_S_DUST,S_DUST,"Dust Level");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_SCENE_CONTROLLER
Serial.println(" S_SCENE_CONTROLLER");
present(ID_S_SCENE_CONTROLLER,S_SCENE_CONTROLLER,"Scene Controller");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_RGB_LIGHT
Serial.println(" RGB_LIGHT");
present(ID_S_RGB_LIGHT,S_RGB_LIGHT,"Mood Light");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_RGBW_LIGHT
Serial.println(" RGBW_LIGHT");
present(ID_S_RGBW_LIGHT,S_RGBW_LIGHT,"Mood Light 2");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_COLOR_SENSOR
Serial.println(" COLOR_SENSOR");
present(ID_S_COLOR_SENSOR,S_COLOR_SENSOR,"Hall Painting");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_HVAC
Serial.println(" HVAC");
present(ID_S_HVAC,S_HVAC,"HVAC");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_MULTIMETER
Serial.println(" MULTIMETER");
present(ID_S_MULTIMETER,S_MULTIMETER,"Electric Staion");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_SPRINKLER
#endif
#ifdef ID_S_WATER_LEAK
#endif
#ifdef ID_S_SOUND
#endif
#ifdef ID_S_VIBRATION
#endif
#ifdef ID_S_MOISTURE
#endif
#ifdef ID_S_MOISTURE
Serial.println(" S_MOISTURE");
present(ID_S_MOISTURE,S_MOISTURE,"Basement Sensor");
wait(SHORT_WAIT);
#endif
#ifdef ID_S_CUSTOM
Serial.println(" S_CUSTOM");
present(ID_S_CUSTOM,S_CUSTOM,"Other Stuff");
wait(SHORT_WAIT);
#endif
Serial.println("________________");
}
void loop()
{
Serial.println("");
Serial.println("");
Serial.println("");
Serial.println("#########################");
randNumber=random(0,101);
Serial.print("RandomNumber:");
Serial.println(randNumber);
// Send fake battery level
Serial.println("Send Battery Level");
sendBatteryLevel(randNumber);
wait(LONG_WAIT);
// Request time
Serial.println("Request Time");
requestTime();
wait(LONG_WAIT);
//Read Sensors
#ifdef ID_S_DOOR
door();
#endif
#ifdef ID_S_MOTION
motion();
#endif
#ifdef ID_S_SMOKE
smoke();
#endif
#ifdef ID_S_LIGHT
light();
#endif
#ifdef ID_S_DIMMER
dimmer();
#endif
#ifdef ID_S_COVER
cover();
#endif
#ifdef ID_S_TEMP
temp();
#endif
#ifdef ID_S_HUM
hum();
#endif
#ifdef ID_S_BARO
baro();
#endif
#ifdef ID_S_WIND
wind();
#endif
#ifdef ID_S_RAIN
rain();
#endif
#ifdef ID_S_UV
uv();
#endif
#ifdef ID_S_WEIGHT
weight();
#endif
#ifdef ID_S_POWER
power();
#endif
#ifdef ID_S_HEATER
heater();
#endif
#ifdef ID_S_DISTANCE
distance();
#endif
#ifdef ID_S_LIGHT_LEVEL
light_level();
#endif
#ifdef ID_S_LOCK
lock();
#endif
#ifdef ID_S_IR
ir();
#endif
#ifdef ID_S_WATER
water();
#endif
#ifdef ID_S_AIR_QUALITY
air();
#endif
#ifdef ID_S_DUST
dust();
#endif
#ifdef ID_S_SCENE_CONTROLLER
scene();
#endif
#ifdef ID_S_RGB_LIGHT
rgbLight();
#endif
#ifdef ID_S_RGBW_LIGHT
rgbwLight();
#endif
#ifdef ID_S_COLOR_SENSOR
color();
#endif
#ifdef ID_S_HVAC
hvac();
#endif
#ifdef ID_S_MULTIMETER
multimeter();
#endif
#ifdef ID_S_SPRINKLER
#endif
#ifdef ID_S_WATER_LEAK
#endif
#ifdef ID_S_SOUND
#endif
#ifdef ID_S_VIBRATION
#endif
#ifdef ID_S_MOISTURE
#endif
#ifdef ID_S_MOISTURE
moisture();
#endif
#ifdef ID_S_CUSTOM
custom();
#endif
sendBatteryLevel(randNumber);
wait(SHORT_WAIT);
Serial.println("#########################");
wait(SLEEP_TIME); //sleep a bit
}
// This is called when a new time value was received
void receiveTime(unsigned long controllerTime)
{
Serial.print("Time value received: ");
Serial.println(controllerTime);
}
//void door(){}
#ifdef ID_S_DOOR
void door()
{
Serial.print("Door is: " );
if (randNumber <= 50) {
Serial.println("Open");
send(msg_S_DOOR_T.set((int16_t)1));
} else {
Serial.println("Closed");
send(msg_S_DOOR_T.set((int16_t)0));
}
#ifdef ID_S_ARMED
Serial.print("System is: " );
Serial.println((isArmed ? "Armed":"Disarmed"));
send(msg_S_DOOR_A.set(isArmed));
#endif
}
#endif
#ifdef ID_S_MOTION
void motion()
{
Serial.print("Motion is: " );
if (randNumber <= 50) {
Serial.println("Active");
send(msg_S_MOTION_T.set(1));
} else {
Serial.println("Quiet");
send(msg_S_MOTION_T.set(0));
}
#ifdef ID_S_ARMED
Serial.print("System is: " );
Serial.println((isArmed ? "Armed":"Disarmed"));
send(msg_S_MOTION_A.set(isArmed));
#endif
}
#endif
#ifdef ID_S_SMOKE
void smoke()
{
Serial.print("Smoke is: " );
if (randNumber <= 50) {
Serial.println("Active");
send(msg_S_SMOKE_T.set(1));
} else {
Serial.println("Quiet");
send(msg_S_SMOKE_T.set(0));
}
#ifdef ID_S_ARMED
Serial.print("System is: " );
Serial.println((isArmed ? "Armed":"Disarmed"));
send(msg_S_SMOKE_A.set(isArmed));
#endif
}
#endif
#ifdef ID_S_LIGHT
void light()
{
Serial.print("Light is: " );
Serial.println((isLightOn ? "On":"Off"));
send(msg_S_LIGHT.set(isLightOn));
}
#endif
#ifdef ID_S_DIMMER
void dimmer()
{
Serial.print("Dimmer is set to: " );
Serial.println(dimmerVal);
send(msg_S_DIMMER.set(dimmerVal));
}
#endif
#ifdef ID_S_COVER
void cover()
{
Serial.print("Cover is : " );
if (coverState == 1) {
Serial.println("Opening");
send(msg_S_COVER_U.set(1));
} else if (coverState == -1) {
Serial.println("Closing");
send(msg_S_COVER_D.set(0));
} else {
Serial.println("Idle");
send(msg_S_COVER_S.set(-1));
}
send(msg_S_COVER_V.set(coverState));
}
#endif
#ifdef ID_S_TEMP
void temp()
{
Serial.print("Temperature is: " );
Serial.println(map(randNumber,1,100,0,45));
send(msg_S_TEMP.set(map(randNumber,1,100,0,45)));
}
#endif
#ifdef ID_S_HUM
void hum()
{
Serial.print("Humitidty is: " );
Serial.println(randNumber);
send(msg_S_HUM.set(randNumber));
}
#endif
#ifdef ID_S_BARO
void baro()
{
const char *weather[] = {"stable","sunny","cloudy","unstable","thunderstorm","unknown"};
long pressure = map(randNumber,1,100,870,1086);// hPa?
int forecast = map(randNumber,1,100,0,5);
Serial.print("Atmosferic Pressure is: " );
Serial.println(pressure);
send(msg_S_BARO_P.set(pressure));
Serial.print("Weather forecast: " );
Serial.println(weather[forecast]);
send(msg_S_BARO_F.set(weather[forecast]));
}
#endif
#ifdef ID_S_WIND
void wind()
{
Serial.print("Wind Speed is: " );
Serial.println(randNumber);
send(msg_S_WIND_S.set(randNumber));
Serial.print("Wind Gust is: " );
Serial.println(randNumber+10);
send(msg_S_WIND_G.set(randNumber+10));
Serial.print("Wind Direction is: " );
Serial.println(map(randNumber,1,100,0,360));
send(msg_S_WIND_D.set(map(randNumber,1,100,0,360)));
}
#endif
#ifdef ID_S_RAIN
void rain()
{
Serial.print("Rain ammount is: " );
Serial.println(randNumber);
send(msg_S_RAIN_A.set(randNumber));
Serial.print("Rain rate is: " );
Serial.println(randNumber/60);
send(msg_S_RAIN_R.set(randNumber/60,1));
}
#endif
#ifdef ID_S_UV
void uv()
{
Serial.print("Ultra Violet level is: " );
Serial.println(map(randNumber,1,100,0,15));
send(msg_S_UV.set(map(randNumber,1,100,0,15)));
}
#endif
#ifdef ID_S_WEIGHT
void weight()
{
Serial.print("Weight is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_WEIGHT.set(map(randNumber,1,100,0,150)));
}
#endif
#ifdef ID_S_POWER
void power()
{
Serial.print("Watt is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_POWER_W.set(map(randNumber,1,100,0,150)));
Serial.print("KWH is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_POWER_K.set(map(randNumber,1,100,0,150)));
}
#endif
#ifdef ID_S_HEATER
void heater()
{
// float heater_setpoint=21.5;
// float heater_temp=23.5;
// bool heater_status=false;
// String heatState="Off";
Serial.print("Heater flow state is: " );
Serial.println(heater_flow_state);
send(msg_S_HEATER_FLOW_STATE.set(heater_flow_state.c_str()));
// Serial.print("Heater on/off is: " );
// Serial.println((heater_status==true)?"On":"Off");
// send(msg_S_HEATER_STATUS.set(heater_status));
// Serial.print("Heater Temperature is: " );
// Serial.println(heater_temp,1);
// send(msg_S_HEATER_TEMP.set(heater_temp,1));
Serial.print("Heater Setpoint: " );
Serial.println(heater_setpoint,1);
send(msg_S_HEATER_SET_POINT.set(heater_setpoint,1));
}
#endif
#ifdef ID_S_DISTANCE
void distance()
{
Serial.print("Distance is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_DISTANCE.set(map(randNumber,1,100,0,150)));
}
#endif
#ifdef ID_S_LIGHT_LEVEL
void light_level()
{
Serial.print("Light is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_LIGHT_LEVEL.set(map(randNumber,1,100,0,150)));
}
#endif
#ifdef ID_S_LOCK
void lock()
{
Serial.print("Lock is: " );
Serial.println((isLocked ? "Locked":"Unlocked"));
send(msg_S_LOCK.set(isLocked));
}
#endif
#ifdef ID_S_IR
void ir()
{
Serial.print("Infrared is: " );
Serial.println(irVal);
send(msg_S_IR_S.set(irVal));
send(msg_S_IR_R.set(irVal));
}
#endif
#ifdef ID_S_WATER
void water()
{
Serial.print("Water flow is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_WATER_F.set(map(randNumber,1,100,0,150)));
Serial.print("Water volume is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_WATER_V.set(map(randNumber,1,100,0,150)));
}
#endif
#ifdef ID_S_AIR_QUALITY
void air()
{
Serial.print("Air Quality is: " );
Serial.println(randNumber);
send(msg_S_AIR_QUALITY.set(randNumber));
}
#endif
#ifdef ID_S_DUST
void dust()
{
Serial.print("Dust level is: " );
Serial.println(randNumber);
send(msg_S_DUST.set(randNumber));
}
#endif
#ifdef ID_S_SCENE_CONTROLLER
void scene()
{
Serial.print("Scene is: " );
Serial.println(scenes[sceneVal]);
if(sceneValPrevious != sceneVal) {
send(msg_S_SCENE_CONTROLLER_OF.set(sceneValPrevious));
send(msg_S_SCENE_CONTROLLER_ON.set(sceneVal));
sceneValPrevious=sceneVal;
}
}
#endif
#ifdef ID_S_RGB_LIGHT
void rgbLight()
{
Serial.print("RGB Light state is: " );
Serial.println(rgbState);
send(msg_S_RGB_LIGHT_V_RGB.set(rgbState.c_str()));
Serial.print("RGB Light Watt is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_RGB_LIGHT_V_WATT.set(map(randNumber,1,100,0,150)));
}
#endif
#ifdef ID_S_RGBW_LIGHT
void rgbwLight()
{
Serial.print("RGBW Light state is: " );
Serial.println(rgbwState);
send(msg_S_RGBW_LIGHT_V_RGBW.set(rgbwState.c_str()));
Serial.print("RGBW Light Watt is: " );
Serial.println(map(randNumber,1,100,0,150));
send(msg_S_RGBW_LIGHT_V_WATT.set(map(randNumber,1,100,0,150)));
}
#endif
#ifdef ID_S_COLOR_SENSOR
void color()
{
String colorState;
String red = String(random(0,256),HEX);
String green = String(random(0,256),HEX);
String blue = String(random(0,256),HEX);
colorState=String(red + green + blue);
Serial.print("Color state is: " );
Serial.println(colorState);
send(msg_S_COLOR_SENSOR_V_RGB.set(colorState.c_str()));
}
#endif
#ifdef ID_S_HVAC
void hvac()
{
// float hvac_SetPointHeat = 16.5;
// float hvac_SetPointCool = 25.5;
// String hvac_FlowState = "AutoChangeOver";
// String hvac_FlowMode = "Auto";
// String hvac_Speed = "Normal";
Serial.print("HVAC Set Point Heat is: " );
Serial.println(hvac_SetPointHeat);
send(msg_S_HVAC_V_HVAC_SETPOINT_HEAT.set(hvac_SetPointHeat,1));
Serial.print("HVAC Set Point Cool is: " );
Serial.println(hvac_SetPointCool);
send(msg_S_HVAC_V_HVAC_SETPOINT_COOL.set(hvac_SetPointCool,1));
Serial.print("HVAC Flow State is: " );
Serial.println(hvac_FlowState);
send(msg_S_HVAC_V_HVAC_FLOW_STATET.set(hvac_FlowState.c_str()));
Serial.print("HVAC Flow Mode is: " );
Serial.println(hvac_FlowMode);
send(msg_S_HVAC_V_HVAC_FLOW_MODE.set(hvac_FlowMode.c_str()));
Serial.print("HVAC Speed is: " );
Serial.println(hvac_Speed);
send(msg_S_HVAC_V_HVAC_SPEED.set(hvac_Speed.c_str()));
}
#endif
#ifdef ID_S_MULTIMETER
void multimeter()
{
int impedance=map(randNumber,1,100,0,15000);
int volt=map(randNumber,1,100,0,380);
int amps=map(randNumber,1,100,0,16);
Serial.print("Impedance is: " );
Serial.println(impedance);
send(msg_S_MULTIMETER_V_IMPEDANCE.set(impedance));
Serial.print("Voltage is: " );
Serial.println(volt);
send(msg_S_MULTIMETER_V_VOLTAGE.set(volt));
Serial.print("Current is: " );
Serial.println(amps);
send(msg_S_MULTIMETER_V_CURRENT.set(amps));
}
#endif
#ifdef ID_S_SPRINKLER
#endif
#ifdef ID_S_WATER_LEAK
#endif
#ifdef ID_S_SOUND
#endif
#ifdef ID_S_VIBRATION
#endif
#ifdef ID_S_MOISTURE
#endif
#ifdef ID_S_MOISTURE
void moisture()
{
Serial.print("Moisture level is: " );
Serial.println(randNumber);
send(msg_S_MOISTURE.set(randNumber));
}
#endif
#ifdef ID_S_CUSTOM
void custom()
{
Serial.print("Custom value is: " );
Serial.println(randNumber);
send(msg_S_CUSTOM_1.set(randNumber));
send(msg_S_CUSTOM_2.set(randNumber));
send(msg_S_CUSTOM_3.set(randNumber));
send(msg_S_CUSTOM_4.set(randNumber));
send(msg_S_CUSTOM_5.set(randNumber));
}
#endif
void receive(const MyMessage &message)
{
switch (message.type) {
#ifdef ID_S_ARMED
case V_ARMED:
isArmed = message.getBool();
Serial.print("Incoming change for ID_S_ARMED:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println((isArmed ? "Armed":"Disarmed" ));
#ifdef ID_S_DOOR
door();//temp ack for door
#endif
#ifdef ID_S_MOTION
motion();//temp ack
#endif
#ifdef ID_S_SMOKE
smoke();//temp ack
#endif
break;
#endif
case V_STATUS: // V_LIGHT:
#ifdef ID_S_LIGHT
if(message.sensor==ID_S_LIGHT) {
isLightOn = message.getBool();
Serial.print("Incoming change for ID_S_LIGHT:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println((isLightOn ? "On":"Off"));
light(); // temp ack
}
#endif
// #ifdef ID_S_HEATER
// if(message.sensor == ID_S_HEATER){
// heater_status = message.getBool();
// Serial.print("Incoming change for ID_S_HEATER:");
// Serial.print(message.sensor);
// Serial.print(", New status: ");
// Serial.println(heater_status);
// heater();//temp ack
// }
// #endif
break;
#ifdef ID_S_DIMMER
case V_DIMMER:
if ((message.getInt()<0)||(message.getInt()>100)) {
Serial.println( "V_DIMMER data invalid (should be 0..100)" );
break;
}
dimmerVal= message.getInt();
Serial.print("Incoming change for ID_S_DIMMER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(message.getInt());
dimmer();// temp ack
break;
#endif
#ifdef ID_S_COVER
case V_UP:
coverState=1;
Serial.print("Incoming change for ID_S_COVER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println("V_UP");
cover(); // temp ack
break;
case V_DOWN:
coverState=-1;
Serial.print("Incoming change for ID_S_COVER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println("V_DOWN");
cover(); //temp ack
break;
case V_STOP:
coverState=0;
Serial.print("Incoming change for ID_S_COVER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println("V_STOP");
cover(); //temp ack
break;
#endif
case V_HVAC_SETPOINT_HEAT:
#ifdef ID_S_HEATER
if(message.sensor == ID_S_HEATER) {
heater_setpoint=message.getFloat();
Serial.print("Incoming set point for ID_S_HEATER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(heater_setpoint,1);
heater();//temp ack
}
#endif
#ifdef ID_S_HVAC
if(message.sensor == ID_S_HVAC) {
hvac_SetPointHeat=message.getFloat();
Serial.print("Incoming set point for ID_S_HVAC:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(hvac_SetPointHeat,1);
hvac();//temp ack
}
#endif
break;
case V_HVAC_FLOW_STATE:
#ifdef ID_S_HEATER
if(message.sensor == ID_S_HEATER) {
heater_flow_state=message.getString();
Serial.print("Incoming flow state change for ID_S_HEATER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(heater_flow_state);
heater();//temp ack
}
#endif
#ifdef ID_S_HVAC
if(message.sensor == ID_S_HVAC) {
hvac_FlowState=message.getString();
Serial.print("Incoming set point for ID_S_HVAC:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(hvac_FlowState);
hvac();//temp ack
}
#endif
break;
#ifdef ID_S_LOCK
case V_LOCK_STATUS:
isLocked = message.getBool();
Serial.print("Incoming change for ID_S_LOCK:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(message.getBool()?"Locked":"Unlocked");
lock(); //temp ack
break;
#endif
#ifdef ID_S_IR
case V_IR_SEND:
irVal = message.getLong();
Serial.print("Incoming change for ID_S_IR:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(irVal);
ir(); // temp ack
break;
case V_IR_RECEIVE:
irVal = message.getLong();
Serial.print("Incoming change for ID_S_IR:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(irVal);
ir(); // temp ack
break;
#endif
#ifdef ID_S_SCENE_CONTROLLER
case V_SCENE_ON:
sceneVal = message.getInt();
Serial.print("Incoming change for ID_S_SCENE_CONTROLLER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.print(scenes[sceneVal]);
Serial.println(" On");
scene();// temp ack
break;
case V_SCENE_OFF:
sceneVal = message.getInt();
Serial.print("Incoming change for ID_S_SCENE_CONTROLLER:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.print(scenes[sceneVal]);
Serial.println(" Off");
scene();// temp ack
break;
#endif
#ifdef ID_S_RGB_LIGHT
case V_RGB:
rgbState=message.getString();
Serial.print("Incoming flow state change for ID_S_RGB_LIGHT:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(rgbState);
rgbLight(); // temp ack
break;
#endif
#ifdef ID_S_RGBW_LIGHT
case V_RGBW:
rgbwState=message.getString();
Serial.print("Incoming flow state change for ID_S_RGBW_LIGHT:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(rgbwState);
rgbwLight();
break;
#endif
#ifdef ID_S_HVAC
// hvac_SetPointHeat
// hvac_SetPointCool
// hvac_FlowState
// hvac_FlowMode
// hvac_Speed
case V_HVAC_SETPOINT_COOL:
hvac_SetPointCool=message.getFloat();
Serial.print("Incoming set point for ID_S_HVAC:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(hvac_SetPointCool,1);
hvac();//temp ack
break;
case V_HVAC_FLOW_MODE:
hvac_Speed=message.getString();
Serial.print("Incoming set point for ID_S_HVAC:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(hvac_Speed);
hvac();//temp ack
break;
case V_HVAC_SPEED:
hvac_FlowMode=message.getString();
Serial.print("Incoming set point for ID_S_HVAC:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(hvac_FlowMode);
hvac();//temp ack
break;
#endif
default:
Serial.print("Unknown/UnImplemented message type: ");
Serial.println(message.type);
}
}```