Gas Meter
-
Hi,
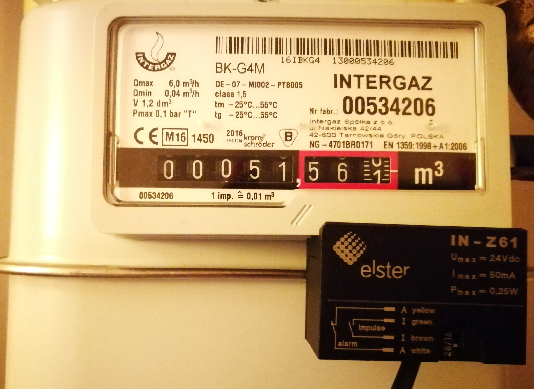
I'm working on gas meter using In-Z61 reed sensor - it's dedicated for gas meters.
My node is build based on https://www.mysensors.org/hardware/ac-dc-ssd-relay
My controller is Domo: v3.8258
My gateway is Arduino UNO shieldData is send over to Domo as designed
One full rotare of gas meter 00.000 [m3] -> 00.010 [m3] is one impuls triggered by reed sensor.This is working - after one rotare i got value send to Domo:
The issue is that after some while the counter still increments - no actual meter movement is done
Below is debug - pulse was 100 and was changed to 101.pulsecount:100 TSP:MSG:SEND 8-8-0-0 s=1,c=1,t=24,pt=5,l=4,sg=0,ft=0,st=ok:100 volume:0.100 TSP:MSG:SEND 8-8-0-0 s=1,c=1,t=35,pt=7,l=5,sg=0,ft=0,st=ok:0.100 TSP:MSG:READ 7-7-255 s=255,c=3,t=7,pt=0,l=0,sg=0: TSP:MSG:BC TSP:MSG:READ 7-7-255 s=255,c=3,t=7,pt=0,l=0,sg=0: TSP:MSG:BC l/min:0.03 TSP:MSG:SEND 8-8-0-0 s=1,c=1,t=34,pt=7,l=5,sg=0,ft=0,st=ok:0.03 pulsecount:101 TSP:MSG:SEND 8-8-0-0 s=1,c=1,t=24,pt=5,l=4,sg=0,ft=0,st=ok:101 volume:0.101 TSP:MSG:SEND 8-8-0-0 s=1,c=1,t=35,pt=7,l=5,sg=0,ft=0,st=ok:0.101 TSP:MSG:READ 7-7-255 s=255,c=3,t=7,pt=0,l=0,sg=0: TSP:MSG:BC pulsecount:101As a sketch I use modified version of PulseWaterMeter - https://www.mysensors.org/build/pulse_water
I changed presentation:
present(CHILD_ID, S_GAS);and added node temp sensor:
present(CHILD_DSB_ID, S_TEMP);It looks like some kind of bouncing effect, but have no idea why counter increments itself.
Help me out to make the code more clear and free of errors.
code below:
/** * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2015 Sensnology AB * Full contributor list: https://github.com/mysensors/Arduino/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * REVISION HISTORY * Version 1.0 - Henrik Ekblad * Version 1.1 - GizMoCuz * * DESCRIPTION * Use this sensor to measure volume and flow of your house watermeter. * You need to set the correct pulsefactor of your meter (pulses per m3). * The sensor starts by fetching current volume reading from gateway (VAR 1). * Reports both volume and flow back to gateway. * * Unfortunately millis() won't increment when the Arduino is in * sleepmode. So we cannot make this sensor sleep if we also want * to calculate/report flow. * http://www.mysensors.org/build/pulse_water */ // Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_NRF5_ESB //#define MY_RADIO_RFM69 //#define MY_RADIO_RFM95 #include <MySensors.h> #include <SPI.h> #include <Bounce2.h> #include <OneWire.h> #include <DallasTemperature.h> #define CHILD_DSB_ID 13 #define ONE_WIRE_BUS 8 #define DIGITAL_INPUT_SENSOR 3 // The digital input you attached your sensor. (Only 2 and 3 generates interrupt!) #define PULSE_FACTOR 1000 // Nummber of blinks per m3 of your meter (One rotation/liter) #define SLEEP_MODE false // flowvalue can only be reported when sleep mode is false. #define MAX_FLOW 40 // Max flow (l/min) value to report. This filters outliers. #define CHILD_ID 1 // Id of the sensor child unsigned long SEND_FREQUENCY = 3000; // Minimum time between send (in milliseconds). We don't want to spam the gateway. Bounce debouncer = Bounce(); int oldValue = 0; bool state; Bounce debouncer2 = Bounce(); int oldValue2 = 0; bool state2; MyMessage flowMsg(CHILD_ID,V_FLOW); MyMessage volumeMsg(CHILD_ID,V_VOLUME); MyMessage lastCounterMsg(CHILD_ID,V_VAR1); MyMessage msgTemp(CHILD_DSB_ID, V_TEMP); OneWire oneWire(ONE_WIRE_BUS); DallasTemperature sensors(&oneWire); // Pass the oneWire reference to Dallas Temperature. double ppl = ((double)PULSE_FACTOR)/1000; // Pulses per liter volatile unsigned long pulseCount = 0; volatile unsigned long lastBlink = 0; volatile double flow = 0; bool pcReceived = false; unsigned long oldPulseCount = 0; unsigned long newBlink = 0; double oldflow = 0; double volume =0; double oldvolume =0; unsigned long lastSend =0; unsigned long lastPulse =0; void setup() { // initialize our digital pins internal pullup resistor so one pulse switches from high to low (less distortion) pinMode(DIGITAL_INPUT_SENSOR, INPUT_PULLUP); pulseCount = oldPulseCount = 0; // Fetch last known pulse count value from gw request(CHILD_ID, V_VAR1); lastSend = lastPulse = millis(); attachInterrupt(digitalPinToInterrupt(DIGITAL_INPUT_SENSOR), onPulse, FALLING); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Gas Meter", "1.1"); // Register this device as Waterflow sensor present(CHILD_ID, S_GAS); present(CHILD_DSB_ID, S_TEMP); } void loop() { static float prevTemp = 0; unsigned long currentTime = millis(); // Only send values at a maximum frequency or woken up from sleep if (SLEEP_MODE || (currentTime - lastSend > SEND_FREQUENCY)) { lastSend=currentTime; if (!pcReceived) { //Last Pulsecount not yet received from controller, request it again request(CHILD_ID, V_VAR1); return; } if (!SLEEP_MODE && flow != oldflow) { oldflow = flow; Serial.print("l/min:"); Serial.println(flow); // Check that we dont get unresonable large flow value. // could hapen when long wraps or false interrupt triggered if (flow<((unsigned long)MAX_FLOW)) { send(flowMsg.set(flow, 2)); // Send flow value to gw } } // No Pulse count received in 2min if(currentTime - lastPulse > 120000) { flow = 0; } // Pulse count has changed if ((pulseCount != oldPulseCount)||(!SLEEP_MODE)) { oldPulseCount = pulseCount; Serial.print("pulsecount:"); Serial.println(pulseCount); send(lastCounterMsg.set(pulseCount)); // Send pulsecount value to gw in VAR1 double volume = ((double)pulseCount/((double)PULSE_FACTOR)); if ((volume != oldvolume)||(!SLEEP_MODE)) { oldvolume = volume; Serial.print("volume:"); Serial.println(volume, 3); send(volumeMsg.set(volume, 3)); // Send volume value to gw } } // Fetch temperatures from Dallas sensors sensors.requestTemperatures(); // Fetch and round temperature to one decimal float temperature = static_cast<float>(static_cast<int>(sensors.getTempCByIndex(0) * 10.f)) / 10.f; if (temperature != -127.00f && temperature != 85.00f && prevTemp != temperature) { // Send in the new temperature send(msgTemp.set(temperature, 1)); Serial.print("Sent temperature: "); Serial.println(temperature); prevTemp = temperature; } } if (SLEEP_MODE) { sleep(SEND_FREQUENCY); } } void receive(const MyMessage &message) { if (message.type==V_VAR1) { unsigned long gwPulseCount=message.getULong(); pulseCount += gwPulseCount; flow=oldflow=0; Serial.print("Received last pulse count from gw:"); Serial.println(pulseCount); pcReceived = true; } } void onPulse() { if (!SLEEP_MODE) { unsigned long newBlink = micros(); unsigned long interval = newBlink-lastBlink; if (interval!=0) { lastPulse = millis(); if (interval<500000L) { // Sometimes we get interrupt on RISING, 500000 = 0.5sek debounce ( max 120 l/min) return; } flow = (60000000.0 /interval) / ppl; } lastBlink = newBlink; } pulseCount++; }
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login