Curtain Control Node.
-
@AWI Seems like my problem is with Domoticz itselfe.
I have the same problem as described in this post https://www.domoticz.com/forum/viewtopic.php?f=6&t=7748@Tore-André-Rosander You can probably solve it by deleting the sensor in Domoticz and let the sketch present itself as S_DIMMER (and use another sensor id)
-
Maybe its because i have not calibrated it? I dont have any pushbuttons laying around, so im gonna make one with some wires. But i see that there is two pins defined as buttons. Should i use the buttonPin1 as VCC?
So it would look something like buttonPin1 -> buttonPin2 -> button -> gnd?
-
Maybe its because i have not calibrated it? I dont have any pushbuttons laying around, so im gonna make one with some wires. But i see that there is two pins defined as buttons. Should i use the buttonPin1 as VCC?
So it would look something like buttonPin1 -> buttonPin2 -> button -> gnd?
@Tore-André-Rosander You can ignore buttonpin2. Just connect your "button" to buttonpin1 and ground.
-
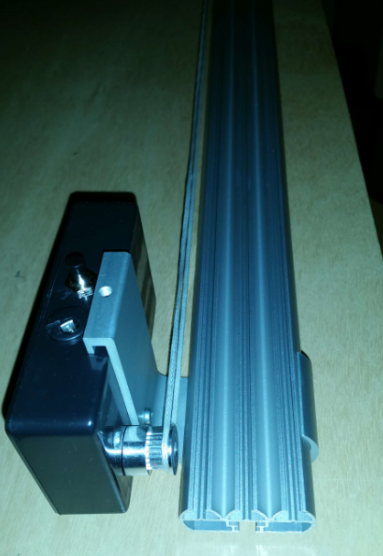
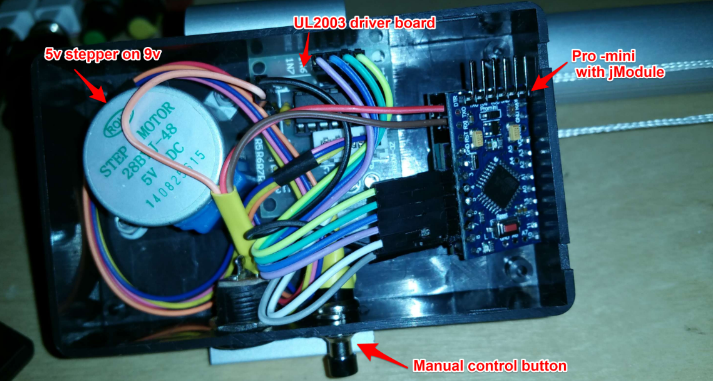
Looks good. I am curious to see the details... jealous for the speed :runner: your curtain is moving.
I have been working on a similar project last week. The mechanics and ´looks´ are the most difficult part for me.
For now I have used a ´tuned´ cheap & small stepper which makes it slooow but effective ;-) The rail and mounting is standard IKEA. The pro-mini has the jModule attached. Works like a charm (/snail)!
-
@AWI I'm curious where you got the rails for the curtain. I wasn't been able to find them, but stumbled on this topic.
-
I'm currently working on a similar project, only I got started with 24V DC motors that I got from my work (left overs from a test project) These motors are very strong (way way over rated) and have a big gearbox what unfortunately makes the movement a bit slow.
I started off with 1 motor to move 2 curtains at the same time, but will change this to 2 motors for either side since the better half of me likes to control the curtains separately in case she only wants to close 1.
Next to the automation there will also be a manual control switch be hidden behind the curtains in case the node is down and I'm not at home to fix the issue...
all running on an ESP8266 (ESP-12e) unit to have it over WiFi and have enough ioCurrently the test setup is working fine and I'm ordering parts to start implementing this a bit bigger in the first room. the test setup I made with some old wood 1 meter of rail and a few old rugs as curtains...

I use a GT2 timing belt that is commently used for 3D printers and pully's are widely available as well as the belts in different lengths (I order them on rolls of 10 meters) and attached the timing belt to a carriage that is normally to pull the curtains with a rod.

the motor is mounted on a bracket with currently 2 end stop switches for open and close (but will be 1 switch for open and 1 for close in the final solution)

resulting in driving the curtain from 1 side


electronics are working fine now and need to be ported to a test print and later to a real PCB design


-
Hello.
To my project i use stepper motor JK42HS34-0404 and driver L298N.
This is a wiring diagram.
This is a program code that I use
#include <MySensor.h> #include <SPI.h> #include <AccelStepper.h> #define HALFSTEP 4 // Stepper uses "Halfstep" mode #define CURTAIN_CLOSED 1000 // value when closed #define CURTAIN_OPEN 0 // value when open #define CHILD_ID 1 // Id of the sensor child // MySensors definitions MySensor gw; // Initialize message MyMessage msg(CHILD_ID, V_TRIPPED); // Motor pin definitions #define motorPin1 3 // IN1 on the ULN2003 driver 1 #define motorPin2 4 // IN2 on the ULN2003 driver 1 #define motorPin3 5 // IN3 on the ULN2003 driver 1 #define motorPin4 6 // IN4 on the ULN2003 driver 1 // Initialize with pin sequence IN1-IN3-IN2-IN4 for using the AccelStepper with 28BYJ-48 AccelStepper stepper1(HALFSTEP, motorPin1, motorPin2, motorPin3, motorPin4); unsigned long current_position ; // remembers current position, need to be saved in EEPROM? void setup() { // MySensors gw.begin(); // fixed node 13 gw.sendSketchInfo("Curtain control 13", "1.0"); // Send the sketch version information to the gateway and Controller //pinMode(DIGITAL_INPUT_SENSOR, INPUT); // sets the motion sensor digital pin as input // Register all sensors to gw (they will be created as child devices) gw.present(CHILD_ID, S_COVER); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP stepper1.setMaxSpeed(500.0); stepper1.setAcceleration(700.0); stepper1.moveTo(CURTAIN_OPEN); current_position = CURTAIN_OPEN ; stepper1.moveTo(CURTAIN_OPEN); }//--(end setup )--- void loop() { // if message = V_UP start moving until closed // if message = V_DOWN start moving back until open // if message = V_STOP stop moving // Test: Change direction when the stepper reaches the target position gw.process(); // check if message from controller if (stepper1.distanceToGo() == 0){ if (stepper1.currentPosition() == CURTAIN_OPEN){ stepper1.moveTo(CURTAIN_CLOSED); Serial.println("Curtain Open, now closing"); gw.request(CHILD_ID, V_UP, 0); // request new values from controller } else{ stepper1.moveTo(CURTAIN_OPEN); Serial.println("Curtain Closed, now opening"); gw.request(CHILD_ID, V_DOWN, 0); // request new values from controller } } stepper1.run(); } // This is called when a message is received void incomingMessage(const MyMessage &message) { // We only expect few types of messages from controller, check which stepper1.moveTo(message.getInt() * CURTAIN_CLOSED/100); Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(" , value: % "); Serial.println(message.getInt()); switch (message.getInt()) { case 100: // Curtain should be opened Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Message UP "); stepper1.moveTo(CURTAIN_OPEN); break; case 0: // Curtain should be closed Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Message DOWN "); stepper1.moveTo(CURTAIN_CLOSED); break; case 50: // Curtain action should be stopped Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Message STOP "); break; default: // not recognizable message Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Unrecognized "); } }When the program I have uploaded to my mysensors, the engine still turns, one left and one to the right and did not work the button blinds in Domoticz.
I cant turn off my stepper motor in Domoticz.
https://www.youtube.com/embed/1Wc1p_9YDQQ
Please help me.
-
I write a program on library Stepper not AccelStepper.
Now is working.Program code:
// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <Stepper.h> #define CURTAIN_CLOSED 1000 // wartosc gdy kurtyna zamknieta #define CURTAIN_OPEN -1000 // wartosc gdy kurtyna otwarta #define CHILD_ID 1 // definicje MySensors MyMessage message(CHILD_ID, S_COVER); int in1Pin = 3; int in2Pin = 4; int in3Pin = 5; int in4Pin = 6; int lastState; // liczba kroków na jeden obrót #define stepsPerRevolution 200 //ustawienie szybkości silnika int motorSpeed = 40; Stepper myStepper(stepsPerRevolution, in1Pin, in2Pin, in3Pin, in4Pin); void setup() { // ustawienie pinów jako wyjście pinMode(in1Pin, OUTPUT); pinMode(in2Pin, OUTPUT); pinMode(in3Pin, OUTPUT); pinMode(in4Pin, OUTPUT); // ustawienie szybkosci silnika myStepper.setSpeed(motorSpeed); } void presentation() { // Wyslanie informacji o wersji programu sendSketchInfo("Program kurtyna", "1.0"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID, S_COVER); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP } void receive(const MyMessage &message) { // if message = V_UP start moving until closed if (message.type==V_UP) { myStepper.step(CURTAIN_OPEN); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_UP, 0); // request new values from controller } if (message.type==V_DOWN) { myStepper.step(CURTAIN_CLOSED); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_DOWN, 0); // request new values from controller } }I use MySensors Library 2.0
Youtube film
-
your wiring diagram is not accessable:
Error (403)
It seems you don't belong here! You should probably sign in. Check out our Help Center and forums for help, or head back to home.i use a DC motor so can't help with stepper motors, but can you share an image of how you setup your rails?
-
I write program with AccelStepper library
/ Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <AccelStepper.h> //import biblioteki AccelStepper #define HALFSTEP 8 #define CURTAIN_CLOSED 2000 // wartosc gdy kurtyna zamknieta #define CURTAIN_OPEN 0 // wartosc gdy kurtyna otwarta #define CHILD_ID 1 // definicje MySensors MyMessage message(CHILD_ID, S_COVER); // Definicja pinow silnika #define IN1 3 // IN1 - zielony #define IN2 4 // IN2 - czarny #define IN3 5 // IN3 - niebieski #define IN4 6 // IN4 - czerwony AccelStepper stepper1(HALFSTEP, IN1, IN2, IN3, IN4); void setup() { stepper1.setMaxSpeed(200.0); stepper1.setAcceleration(1000.0); stepper1.setSpeed(200); stepper1.moveTo(CURTAIN_OPEN); } void presentation() { // Wyslanie informacji o wersji programu sendSketchInfo("Program kurtyna", "1.0"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID, S_COVER); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP } void loop() { stepper1.run(); //Start } void receive(const MyMessage &message) { // if message = V_UP start moving until closed if (message.type==V_UP) { if (stepper1.distanceToGo() == 0){ if (stepper1.currentPosition() == CURTAIN_OPEN){ stepper1.moveTo(CURTAIN_CLOSED); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_UP, 0); // request new values from controller } } } if (message.type==V_DOWN) { stepper1.moveTo(CURTAIN_OPEN); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_DOWN, 0); // request new values from controller } if (message.type==V_STOP) { stepper1.setCurrentPosition(0); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_STOP, 0); // request new values from controller } }I use MySensors library 2.0
Now i working.
-
Hello,
I trying to adopt the code for 28BYJ-48 stepper motor with ULN2003 driver board for roller blinds control. Code is working, but when the stepper motor is always on - it gets hot. Because of it also its consumes more energy. So thats why I want to turn on ULN2003 board only when new action is started, and after that it should be shuted down again. I could do it, because ULN2003 has On/Off jumper:

Question #1: I trying to use relay for that On/Off. Could I do it without relay and control On/Off jumper directly from arduino? Does relay is the best solution?
Question #2: I suck at programming, but I trying to add theese lines to my code to control the relay SIL05-1A72-71D, which controls the ULN2003 driver board:
int powerPin = 7; //before SETUP
pinMode(powerPin, OUTPUT); // In SETUP
digitalWrite(powerPin, LOW); // In SETUP
digitalWrite(powerPin, HIGH); // In void receive function
delay(CURTAIN_CLOSED); // In void receive function
digitalWrite(powerPin, LOW); // In void receive functiondigitalWrite(powerPin, HIGH); - I think is in right position, but I don't know how to turn off relay when action is done. Please advise for coding, because I not good in it. Thank You! Below is the code:
// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_NODE_ID 10 #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node //#define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <AccelStepper.h> //import biblioteki AccelStepper #define HALFSTEP 8 #define CURTAIN_CLOSED 10000 // wartosc gdy kurtyna zamknieta #define CURTAIN_OPEN 0 // wartosc gdy kurtyna otwarta #define CHILD_ID 1 int powerPin = 7; // definicje MySensors MyMessage message(CHILD_ID, S_COVER); // Definicja pinow silnika #define IN1 3 // IN1 - zielony #define IN2 4 // IN2 - czarny #define IN3 5 // IN3 - niebieski #define IN4 6 // IN4 - czerwony AccelStepper stepper1(HALFSTEP, IN1, IN3, IN2, IN4); void setup() { stepper1.setMaxSpeed(1000.0); stepper1.setAcceleration(100.0); stepper1.setSpeed(200); stepper1.moveTo(CURTAIN_OPEN); pinMode(powerPin, OUTPUT); digitalWrite(powerPin, LOW); } void presentation() { // Wyslanie informacji o wersji programu sendSketchInfo("Roller blinds", "1.0"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID, S_COVER); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP } void loop() { stepper1.run(); //Start } void receive(const MyMessage &message) { // if message = V_UP start moving until closed if (message.type==V_UP) { digitalWrite(powerPin, HIGH); if (stepper1.distanceToGo() == 0){ if (stepper1.currentPosition() == CURTAIN_OPEN){ stepper1.moveTo(CURTAIN_CLOSED); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_UP, 0); // request new values from controller } } } if (message.type==V_DOWN) { digitalWrite(powerPin, HIGH); stepper1.moveTo(CURTAIN_OPEN); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_DOWN, 0); // request new values from controller } if (message.type==V_STOP) { digitalWrite(powerPin, HIGH); stepper1.setCurrentPosition(0); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_STOP, 0); // request new values from controller } // delay(CURTAIN_CLOSED); // digitalWrite(powerPin, LOW); } -
Hello,
I trying to adopt the code for 28BYJ-48 stepper motor with ULN2003 driver board for roller blinds control. Code is working, but when the stepper motor is always on - it gets hot. Because of it also its consumes more energy. So thats why I want to turn on ULN2003 board only when new action is started, and after that it should be shuted down again. I could do it, because ULN2003 has On/Off jumper:
Question #1: I trying to use relay for that On/Off. Could I do it without relay and control On/Off jumper directly from arduino? Does relay is the best solution?
Question #2: I suck at programming, but I trying to add theese lines to my code to control the relay SIL05-1A72-71D, which controls the ULN2003 driver board:
int powerPin = 7; //before SETUP
pinMode(powerPin, OUTPUT); // In SETUP
digitalWrite(powerPin, LOW); // In SETUP
digitalWrite(powerPin, HIGH); // In void receive function
delay(CURTAIN_CLOSED); // In void receive function
digitalWrite(powerPin, LOW); // In void receive functiondigitalWrite(powerPin, HIGH); - I think is in right position, but I don't know how to turn off relay when action is done. Please advise for coding, because I not good in it. Thank You! Below is the code:
// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_NODE_ID 10 #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node //#define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <AccelStepper.h> //import biblioteki AccelStepper #define HALFSTEP 8 #define CURTAIN_CLOSED 10000 // wartosc gdy kurtyna zamknieta #define CURTAIN_OPEN 0 // wartosc gdy kurtyna otwarta #define CHILD_ID 1 int powerPin = 7; // definicje MySensors MyMessage message(CHILD_ID, S_COVER); // Definicja pinow silnika #define IN1 3 // IN1 - zielony #define IN2 4 // IN2 - czarny #define IN3 5 // IN3 - niebieski #define IN4 6 // IN4 - czerwony AccelStepper stepper1(HALFSTEP, IN1, IN3, IN2, IN4); void setup() { stepper1.setMaxSpeed(1000.0); stepper1.setAcceleration(100.0); stepper1.setSpeed(200); stepper1.moveTo(CURTAIN_OPEN); pinMode(powerPin, OUTPUT); digitalWrite(powerPin, LOW); } void presentation() { // Wyslanie informacji o wersji programu sendSketchInfo("Roller blinds", "1.0"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID, S_COVER); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP } void loop() { stepper1.run(); //Start } void receive(const MyMessage &message) { // if message = V_UP start moving until closed if (message.type==V_UP) { digitalWrite(powerPin, HIGH); if (stepper1.distanceToGo() == 0){ if (stepper1.currentPosition() == CURTAIN_OPEN){ stepper1.moveTo(CURTAIN_CLOSED); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_UP, 0); // request new values from controller } } } if (message.type==V_DOWN) { digitalWrite(powerPin, HIGH); stepper1.moveTo(CURTAIN_OPEN); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_DOWN, 0); // request new values from controller } if (message.type==V_STOP) { digitalWrite(powerPin, HIGH); stepper1.setCurrentPosition(0); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_STOP, 0); // request new values from controller } // delay(CURTAIN_CLOSED); // digitalWrite(powerPin, LOW); }@jacikaas said in Curtain Control Node.:
void receive(const MyMessage &message)
{
// if message = V_UP start moving until closed
if (message.type==V_UP) {
digitalWrite(powerPin, HIGH);
if (stepper1.distanceToGo() == 0){
if (stepper1.currentPosition() == CURTAIN_OPEN){
stepper1.moveTo(CURTAIN_CLOSED);
// Store state in eeprom
saveState(message.sensor, message.getBool());
request(CHILD_ID, V_UP, 0); // request new values from controller
}
}
}
if (message.type==V_DOWN) {
digitalWrite(powerPin, HIGH);
stepper1.moveTo(CURTAIN_OPEN);
// Store state in eeprom
saveState(message.sensor, message.getBool());
request(CHILD_ID, V_DOWN, 0); // request new values from controller
}
if (message.type==V_STOP) {
digitalWrite(powerPin, HIGH);
stepper1.setCurrentPosition(0);
// Store state in eeprom
saveState(message.sensor, message.getBool());
request(CHILD_ID, V_STOP, 0); // request new values from controller
}
// delay(CURTAIN_CLOSED);
// digitalWrite(powerPin, LOW);
}You can enable and disable outputs and try. In the following function:
void receive(const MyMessage &message)//add the following at the begining of the function stepper1.enableOutputs () //and add the following at the end in the same function. stepper1.disableOutputs ()I hope this helps haven't tried it myself.
-
@jacikaas said in Curtain Control Node.:
void receive(const MyMessage &message)
{
// if message = V_UP start moving until closed
if (message.type==V_UP) {
digitalWrite(powerPin, HIGH);
if (stepper1.distanceToGo() == 0){
if (stepper1.currentPosition() == CURTAIN_OPEN){
stepper1.moveTo(CURTAIN_CLOSED);
// Store state in eeprom
saveState(message.sensor, message.getBool());
request(CHILD_ID, V_UP, 0); // request new values from controller
}
}
}
if (message.type==V_DOWN) {
digitalWrite(powerPin, HIGH);
stepper1.moveTo(CURTAIN_OPEN);
// Store state in eeprom
saveState(message.sensor, message.getBool());
request(CHILD_ID, V_DOWN, 0); // request new values from controller
}
if (message.type==V_STOP) {
digitalWrite(powerPin, HIGH);
stepper1.setCurrentPosition(0);
// Store state in eeprom
saveState(message.sensor, message.getBool());
request(CHILD_ID, V_STOP, 0); // request new values from controller
}
// delay(CURTAIN_CLOSED);
// digitalWrite(powerPin, LOW);
}You can enable and disable outputs and try. In the following function:
void receive(const MyMessage &message)//add the following at the begining of the function stepper1.enableOutputs () //and add the following at the end in the same function. stepper1.disableOutputs ()I hope this helps haven't tried it myself.
@suresh-mali Thank You Suresh for Your answer!
I disconnect relay and delete it lines from the code.I add lines to code like You said:
void receive(const MyMessage &message) { stepper1.enableOutputs (); // rest of code stepper1.disableOutputs (); }It looks like it have to work because it is simple solution, but it doesn't... On driver board ULN2003, when motor is not rotating, A Led is always on. I think if command with disableOutputs would be activated, then the LED should not be on?
-
@suresh-mali Thank You Suresh for Your answer!
I disconnect relay and delete it lines from the code.I add lines to code like You said:
void receive(const MyMessage &message) { stepper1.enableOutputs (); // rest of code stepper1.disableOutputs (); }It looks like it have to work because it is simple solution, but it doesn't... On driver board ULN2003, when motor is not rotating, A Led is always on. I think if command with disableOutputs would be activated, then the LED should not be on?
@jacikaas Ok.
//Remove this line from loop function stepper1.run(); //Change this line stepper1.moveTo(CURTAIN_CLOSED); //to stepper1.runToPosition(CURTAIN_CLOSED);I hope this works. Also make similar changes in block which closes curtains.
Refernce article: https://www.pjrc.com/teensy/td_libs_AccelStepper.html -
@suresh-mali
I now reading about that funktions in http://www.airspayce.com/mikem/arduino/AccelStepper/classAccelStepper.html#a344f58fef8cc34ac5aa75ba4b665d21cDid what You said, but getting error: no matching function for call to 'AccelStepper::runToPosition(int)'
I paste here all code, but I think I did everything without mistakes:// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_NODE_ID 10 #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node //#define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <AccelStepper.h> #define HALFSTEP 8 #define CURTAIN_CLOSED 10000 #define CURTAIN_OPEN 0 #define CHILD_ID 1 // int powerPin = 7; // definicje MySensors MyMessage message(CHILD_ID, S_COVER); // Definicja pinow silnika #define IN1 3 // IN1 #define IN2 4 // IN2 #define IN3 5 // IN3 #define IN4 6 // IN4 AccelStepper stepper1(HALFSTEP, IN1, IN3, IN2, IN4); void setup() { stepper1.setMaxSpeed(1000.0); stepper1.setAcceleration(100.0); stepper1.setSpeed(200); stepper1.runToPosition(CURTAIN_CLOSED); } void presentation() { sendSketchInfo("Roller blinds", "1.0"); present(CHILD_ID, S_COVER); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP } void loop() { //stepper1.run(); //Start } void receive(const MyMessage &message) { stepper1.enableOutputs (); // if message = V_UP start moving until closed if (message.type==V_UP) { if (stepper1.distanceToGo() == 0){ if (stepper1.currentPosition() == CURTAIN_OPEN){ stepper1.runToPosition(CURTAIN_CLOSED); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_UP, 0); // request new values from controller } } } if (message.type==V_DOWN) { stepper1.moveTo(CURTAIN_OPEN); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_DOWN, 0); // request new values from controller } if (message.type==V_STOP) { stepper1.setCurrentPosition(0); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_STOP, 0); // request new values from controller } stepper1.disableOutputs (); } -
@suresh-mali
I now reading about that funktions in http://www.airspayce.com/mikem/arduino/AccelStepper/classAccelStepper.html#a344f58fef8cc34ac5aa75ba4b665d21cDid what You said, but getting error: no matching function for call to 'AccelStepper::runToPosition(int)'
I paste here all code, but I think I did everything without mistakes:// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_NODE_ID 10 #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 // Enable repeater functionality for this node //#define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <AccelStepper.h> #define HALFSTEP 8 #define CURTAIN_CLOSED 10000 #define CURTAIN_OPEN 0 #define CHILD_ID 1 // int powerPin = 7; // definicje MySensors MyMessage message(CHILD_ID, S_COVER); // Definicja pinow silnika #define IN1 3 // IN1 #define IN2 4 // IN2 #define IN3 5 // IN3 #define IN4 6 // IN4 AccelStepper stepper1(HALFSTEP, IN1, IN3, IN2, IN4); void setup() { stepper1.setMaxSpeed(1000.0); stepper1.setAcceleration(100.0); stepper1.setSpeed(200); stepper1.runToPosition(CURTAIN_CLOSED); } void presentation() { sendSketchInfo("Roller blinds", "1.0"); present(CHILD_ID, S_COVER); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP } void loop() { //stepper1.run(); //Start } void receive(const MyMessage &message) { stepper1.enableOutputs (); // if message = V_UP start moving until closed if (message.type==V_UP) { if (stepper1.distanceToGo() == 0){ if (stepper1.currentPosition() == CURTAIN_OPEN){ stepper1.runToPosition(CURTAIN_CLOSED); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_UP, 0); // request new values from controller } } } if (message.type==V_DOWN) { stepper1.moveTo(CURTAIN_OPEN); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_DOWN, 0); // request new values from controller } if (message.type==V_STOP) { stepper1.setCurrentPosition(0); // Store state in eeprom saveState(message.sensor, message.getBool()); request(CHILD_ID, V_STOP, 0); // request new values from controller } stepper1.disableOutputs (); }@jacikaas Sorry to revive an old thread, but did you get this resolved and if so how?
I just 3D printed my first motorised roller blind mounts and have tested with arduino stepper only.
Next is to go mysensors with it, but which way is best? Standard arduino stepper or accelstepper?
-
Okey. This is an old thread but I hope it's ok I keep it alive.
I just printed som parts for my blinds.
I use a stepper motor (28BYJ-48 with ULN2003 Driver board) and this sketch found in this thread.
The sketch is awesome.
To my quiestion.
I want to run 2 blinds at the same time from ONE node. Synchronized or maybe individual.
Is this possible?
There isn't any digital pins over for this when using button(s).
I think i saw someone using analog pin connected to the ULN2003 someware.
Is it possible to run 2 motors on one board?
Really hope somone can answer som of my question.
What modifications is needed in the sketch if this is possible.
This is the sketch I use./* PROJECT: MY Sensors curtain controller PROGRAMMER: AWI DATE: march 11, 2016 FILE: AWI stepper1.ino LICENSE: Public domain Hardware: ATMega328p board w/ NRF24l01 and MySensors 2.0 (Development) Special: uses AccelStepper library Summary: Curtain control with stepper motor. Manual operation with 1 push button Calibration with manual button Remarks: Fixed node-id Change log: 20160312 - Cleanup */ // Enable debug prints to serial monitor #define MY_DEBUG #define MY_NODE_ID 13 // fixed node number // Enable and select radio type attached #define MY_RADIO_RF24 //#define MY_RADIO_RFM69 #include <SPI.h> #include <MySensors.h> // stepper library #include <AccelStepper.h> // http://www.airspayce.com/mikem/arduino/AccelStepper/ #define HALFSTEP 8 // Stepper uses "Halfstep" mode // button library // used for: // - manual open close - single click: close/ stop/ open/ stop // - calibration - after long press: open calibarion- until single press - closed calibration - until single press (stop) #include <Button.h> // https://github.com/JChristensen/Button #define CHILD_ID 1 // Id of the sensor child #define SN "Curtain control 13" #define SV "1.0" #define buttonPin1 7 // Arduino pin connected to buttonPin1 #define buttonPin2 A0 // Arduino pin connected to buttonPin2 (fixed to ground) // Motor pin definitions #define motorPin1 3 // IN1 on the ULN2003 driver 1 #define motorPin2 4 // IN2 on the ULN2003 driver 1 #define motorPin3 5 // IN3 on the ULN2003 driver 1 #define motorPin4 6 // IN4 on the ULN2003 driver 1 const unsigned long heartbeatInterval = 1 * 3600UL * 1000UL ; // heartbeatinterval unsigned long heartbeatCounter = 0 ; // // helper routines to store and retrieve long in mysensors EEPROM union { // used to convert long to bytes for EEPROM storage long longInt; uint8_t LongByte[4]; } convLongInt ; void saveStateL(int EEposition, long StateL){ convLongInt.longInt = StateL ; for (int y = 0; y < 4 ; y++){ // convert to bytes saveState(EEposition + y , convLongInt.LongByte[y]) ; } Serial.print("State saved: "); Serial.println(StateL); } long loadStateL(int EEposition){ for (int y = 0; y < 4 ; y++){ // convert from bytes convLongInt.LongByte[y] = loadState(EEposition + y) ; } Serial.print("State read: "); Serial.println(convLongInt.longInt); return convLongInt.longInt ; } // Initialize with pin sequence IN1-IN3-IN2-IN4 for using the AccelStepper with 28BYJ-48 AccelStepper stepper1(HALFSTEP, motorPin1, motorPin3, motorPin2, motorPin4); // Initialize button active low, debounce and internal pull-up Button myBtn(buttonPin1, true, true, 40); // Initiate the button (pin, pull_up, invert, debounce_ms) MyMessage percentageMsg(CHILD_ID, V_PERCENTAGE); // used to send updates to controller const long maxRun = 4000000L ; // maximum runway long setPosition = 0 ; // remembers set position, need to be saved in EEPROM const int setPositionEE = 4 ; // eeprom location long openPosition = 0 ; // Position at open, need to be saved in EEPROM? const int openPositionEE = setPositionEE + 4 ; // eeprom location long closedPosition = 120000UL ; // Position at full close, need to be saved in EEPROM const int closedPositionEE = openPositionEE + 4 ; // eeprom location unsigned long idleTimer = millis() ; // return to idle timer unsigned long idleTime = 100000UL ; // return to idle after 100 secs unsigned long printTimer = millis() ; // print timer unsigned long printTime = 1000UL ; // print after 1 secs enum position_t {Open, Close, Idle, Running} ; position_t lastDirection = Open ; // lastDirection only for buttonpress position_t runStatus = Idle ; // indicates current status for running motor. used for status reporting to controller enum State_t {sIdle, sCalibrateOpen, sCalibrateClose} ; State_t State = sIdle ; void setup() { // setup buttons pinMode(buttonPin1, OUTPUT); stepper1.setMaxSpeed(2000.0); stepper1.setAcceleration(1000.0); //saveStateL(closedPositionEE, closedPosition) ; // INIT: save closed position in EEPROM closedPosition = loadStateL(closedPositionEE) ; // need to get last values from EEPROM and assume the current position is correct setPosition = loadStateL(setPositionEE) ; stepper1.setCurrentPosition(setPosition ); }//--(end setup )--- void presentation() { present(CHILD_ID, S_COVER, "Curtain"); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP // Register the LED Dimmable Light with the gateway sendSketchInfo(SN, SV); } void loop() { unsigned int now = millis() ; // current time for loop // simple state machine for button press myBtn.read(); switch (State) { // Idle state, waiting for some action // - button press // - idleTimer case sIdle: if (myBtn.wasReleased()){ // idle Serial.println("Button release") ; // if running stop if (stepper1.isRunning()){ setPosition = stepper1.currentPosition(); stepper1.moveTo(setPosition) ; // move to current position (was already there..) } else if (lastDirection == Open) { stepper1.moveTo(closedPosition) ; lastDirection = Close ; } else { // lastDirection == Close stepper1.moveTo(openPosition) ; lastDirection = Open ; } } else if (myBtn.pressedFor(3000)){ // move to calibratete state with long press Serial.println("Button press long") ; idleTimer = now ; // return to idle after ... State = sCalibrateOpen ; stepper1.move(-maxRun) ; // let the stepper open with maximum } break ; // if not running and last action was open close ; else open // if longpress Calibrate open case sCalibrateOpen: // calibration going on if (myBtn.wasPressed()){ stepper1.setCurrentPosition(0 ); // set new 0 position ?? openPosition = setPosition = 0 ; State = sCalibrateClose ; // next is close calibarion stepper1.move(maxRun) ; // let the stepper close with maximum } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; case sCalibrateClose: // calibrate closed position, end with keypress if (myBtn.wasPressed()) { closedPosition = setPosition = stepper1.currentPosition() ; saveStateL(closedPositionEE, closedPosition) ; // save closed position in EEPROM State = sIdle ; stepper1.moveTo(openPosition) ; // return to open after calibration } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; default : break ; } // power off stepper if not running (no need to reenable)) if (!stepper1.isRunning()){ if (runStatus != Idle){ // there was a change in runningstatus, so report to controller setPosition = stepper1.currentPosition() ; // store in EEPROM and report ready to controller saveStateL(setPositionEE, setPosition) ; send( percentageMsg.set((100 * setPosition)/(closedPosition - openPosition))) ; runStatus = Idle ; } stepper1.disableOutputs(); } else { runStatus = Running ; } stepper1.run(); /* if (printTimer++ > now + printTime){ printTimer = now ; Serial.println(stepper1.currentPosition()); } */ } // This is called when a message is received void receive(const MyMessage &message) { // We only expect few types of messages from controller, check which switch (message.type) { case V_PERCENTAGE: // Curtain should be opened stepper1.moveTo(message.getInt() * (closedPosition - openPosition)/100); Serial.print("Message: "); Serial.print(message.sensor); Serial.print(" , value: % "); Serial.println( message.getInt()); Serial.print("Moving to: "); Serial.println(message.getInt() * (closedPosition - openPosition)/100); break ; case V_STATUS: // Curtain should be opened or closed full stepper1.moveTo((message.getInt() == HIGH)?openPosition:closedPosition); Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(" , value: % "); break ; default : // not recognizable message Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Unrecognized "); break ; } } -
You can use an I/O expander like an MCP23017 which is a 16 port expander or a 8 port expander. They're cheap. Keep in mind they consume 1 mAmp. I'm currently working on a product to overcome that power issue for a battery powered Node. Will try to post about it in a while