Hello,
A friend of mine has a Sensus Residia Jet water meter, which can work through Z-wave with a "Secure SWM301 Water Meter Sensor".
Only one domotic box support it but not the other at this time, so I tried to make it work with mysensors..
I have found a way based on "DFRobot Analog Grayscale Sensor V2" that works !
The sensor: http://www.dfrobot.com/index.php?route=product/product&product_id=81
Simply scotch the sensor on the counter so that it detects the wheel (no magnet or visual signal on this counter... the zwave sensors uses VLF induction with two tors).

/*
Use this sensor to measure volume and flow of your house watermeter.
You need to set the correct pulsefactor of your meter (pulses per m3).
The sensor starts by fetching current volume reading from gateway (VAR 1).
Reports both volume and flow back to gateway.
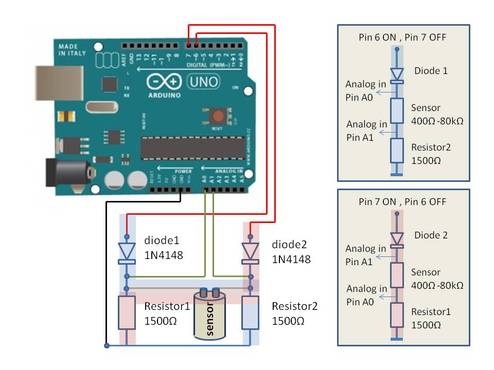
Sensor on pin analog 0
DFRobot Analog Grayscale Sensor V2
Watermeter sensus Residia Jet
http://www.dfrobot.com/index.php?route=product/product&product_id=81
Contribution: Hek, adapted by epierre to greyscale sensor water meter
License: Attribution-NonCommercial-ShareAlike 3.0 Unported (CC BY-NC-SA 3.0)
*/
#include <MySensor.h>
#include <SPI.h>
#define ANALOG_INPUT_SENSOR 0 // The analog input you attached your sensor.
#define PULSE_FACTOR 1000 // Nummber of blinks per m3 of your meter (One rotation/liter)
#define SLEEP_MODE false // flowvalue can only be reported when sleep mode is false.
#define MAX_FLOW 40 // Max flow (l/min) value to report. This filetrs outliers.
#define INTERRUPT DIGITAL_INPUT_SENSOR-2 // Usually the interrupt = pin -2 (on uno/nano anyway)
#define CHILD_ID 5 // Id of the sensor child
unsigned long SEND_FREQUENCY = 20000; // Minimum time between send (in seconds). We don't want to spam the gateway.
MySensor gw;
MyMessage flowMsg(CHILD_ID,V_FLOW);
MyMessage volumeMsg(CHILD_ID,V_VOLUME);
MyMessage pcMsg(CHILD_ID,V_VAR1);
double ppl = ((double)PULSE_FACTOR)/1000; // Pulses per liter
volatile unsigned long pulseCount = 0;
volatile unsigned long lastBlink = 0;
volatile double flow = 0;
boolean pcReceived = false;
unsigned long oldPulseCount = 0;
unsigned long newBlink = 0;
double oldflow = 0;
double volume;
double oldvolume;
unsigned long lastSend;
unsigned long lastPulse;
unsigned long currentTime;
boolean metric;
long lastDebounce = 0;
long debounceDelay = 500; // Ignore bounces under 1/2 second
int oldval =0;
int val=0;
void setup()
{
gw.begin(incomingMessage);
// Send the sketch version information to the gateway and Controller
gw.sendSketchInfo("Water Meter", "1.0 greyscale");
// Register this device as Waterflow sensor
gw.present(CHILD_ID, S_WATER);
// Fetch last known pulse count value from gw
gw.request(CHILD_ID, V_VAR1);
//Serial.print("Last pulse count from gw:");
//Serial.println(pulseCount);
// attachInterrupt(INTERRUPT, onPulse, RISING);
lastSend = millis();
//led blinking
pinMode(13, OUTPUT);
}
void loop()
{
gw.process();
currentTime = millis();
val=analogRead(0);
//Serial.println(val);
if ((oldval <100) and (val >100)) {
pulseCount++;
oldval=val;
} else {
oldval=val;
}
delay(100);
// Only send values at a maximum frequency or woken up from sleep
bool sendTime = currentTime - lastSend > SEND_FREQUENCY;
// Pulse count has changed
if (pulseCount != oldPulseCount) {
gw.send(pcMsg.set(pulseCount)); // Send volumevalue to gw VAR1
double volume = ((double)pulseCount/((double)PULSE_FACTOR));
oldPulseCount = pulseCount;
if (volume != oldvolume) {
gw.send(volumeMsg.set(volume, 3)); // Send volume value to gw
//Serial.print("V=");
//Serial.println(volume);
oldvolume = volume;
}
}
lastSend = currentTime;
if (sendTime && !pcReceived) {
// No count received. Try requesting it again
gw.request(CHILD_ID, V_VAR1);
lastSend=currentTime;
}
}
void incomingMessage(const MyMessage &message) {
if (message.type==V_VAR1) {
pulseCount = oldPulseCount = message.getLong();
Serial.print("Received last pulse count from gw:");
Serial.println(pulseCount);
pcReceived = true;
}
}
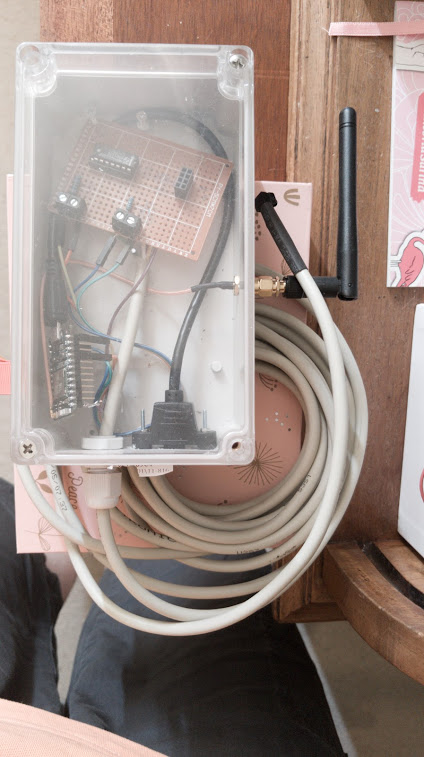
Here a picture of the emitter, a Nano with high range antennae in a box !