Fields Mysensors
-
Hello
discovering MyController2
I'm trying to understand how to get the data back
of Mysensors in the dashboard.the question is :
how to differentiate my sensors in the Widgets?in the example of the pdf file https://nsmf01.casimages.com/f/2022/03/24//2203240203102387089992.pdf
I have two V_TEMP and two V_HUMa test by renaming Name :V_TEMP to V_TEMP1 gave nothing, TEMP1 comes back as TEMP
in short it is the fog
how do we use the labels?
I didn't find any doc on the subject with MysensorsThanks
-
I found it ;)
in Resource Filters
Key : sourceid
Value : 2(I update my pdf)
yeah the doc on the use of
"Resource Filters" with "Key" "Value"
values would be niceit's really a pity that you can't modify your previous post, too short delay, minimum one month :)
-
Hello
a tutorial / help for the structure
(the skeleton) of a MySensors sketch.to go back automatically to MyController
the nodes and sensorshere is an example in image (pdf)
texte du lienand the sketch (Mysensors parts only )
// ------ Mysensors V2 ------- // #define MY_NODE_ID 32 /*Node ID static*/ #define CHILD_ID_R 3 /*Id Relay*/ #define CHILD_ID_B 4 /*Id Door*/ MyMessage msg(CHILD_ID_R,V_STATUS); MyMessage msg1(CHILD_ID_B,V_TRIPPED); void setup() { .... } void presentation() { sendSketchInfo("DiDo node 32", "2.0"); /* version sketch*/ //Mysenors save Child and Gw present(CHILD_ID_R, S_BINARY); /*output digital*/ present(CHILD_ID_B, S_DOOR); /*input digital*/ request(CHILD_ID_R, V_STATUS); /*request value of the controller*/ request(CHILD_ID_B, V_STATUS); ... } void loop() { ... // send(msg.set(value==HIGH ? 1 : 0)); /*Relay send(msg1.set(value==HIGH ? 1 : 0)); /*Door ...} void receive(const MyMessage &message) { if (message.type == V_STATUS) { state = message.getBool (); digitalWrite(RELAY_PIN, state?RELAY_ON:RELAY_OFF); /*Change relay state*/ if (message.getType()==V_STATUS) { //digitalWrite(message.getSensor() - RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); ... }a question : I don't understand the use of
"message.getType" and "message.getBool" ?one instruction too many ??
thanks
-
Hello
a tutorial / help for the structure
(the skeleton) of a MySensors sketch.to go back automatically to MyController
the nodes and sensorshere is an example in image (pdf)
texte du lienand the sketch (Mysensors parts only )
// ------ Mysensors V2 ------- // #define MY_NODE_ID 32 /*Node ID static*/ #define CHILD_ID_R 3 /*Id Relay*/ #define CHILD_ID_B 4 /*Id Door*/ MyMessage msg(CHILD_ID_R,V_STATUS); MyMessage msg1(CHILD_ID_B,V_TRIPPED); void setup() { .... } void presentation() { sendSketchInfo("DiDo node 32", "2.0"); /* version sketch*/ //Mysenors save Child and Gw present(CHILD_ID_R, S_BINARY); /*output digital*/ present(CHILD_ID_B, S_DOOR); /*input digital*/ request(CHILD_ID_R, V_STATUS); /*request value of the controller*/ request(CHILD_ID_B, V_STATUS); ... } void loop() { ... // send(msg.set(value==HIGH ? 1 : 0)); /*Relay send(msg1.set(value==HIGH ? 1 : 0)); /*Door ...} void receive(const MyMessage &message) { if (message.type == V_STATUS) { state = message.getBool (); digitalWrite(RELAY_PIN, state?RELAY_ON:RELAY_OFF); /*Change relay state*/ if (message.getType()==V_STATUS) { //digitalWrite(message.getSensor() - RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); ... }a question : I don't understand the use of
"message.getType" and "message.getBool" ?one instruction too many ??
thanks
@JeeLet can you add
send(msg.set(value==HIGH ? 1 : 0)); // Relayin yoursetup(){}function?message.getType- returns the type of the message. you can see different types in https://www.mysensors.org/download/serial_api_20 underset, reqmessage.getBool- returns the boolean value of your payload. MySensors sends and receives all the payload in string format. in the arduino sketch with this different type of get functions you can get exact payload without additional steps. more details on https://www.mysensors.org/apidocs/classMyMessage.html
-
Hello jkandasa
I spent the day on the Mysensors website copying/translating some parts of the "serial_api_20" doc
(I have no more eyes :) )yes I will add it soon
send(msg.set(value==HIGH ? 1 : 0)); // Relayyou mas understood, I try to write well the code of the sckech
so that MyCrontroller goes up cleanly the sensors :)Merci
-
exit status 1 : 'value' was not declared in this scope
but why in the setup ?
you have to put it in Loop () ?//-----------Mars.2022------- Node 32 --------- MySensors DI DO MyController -----------------// // #define MY_DEBUG /*Enable debug prints to serial monitor*/ // #define MY_DEBUG_OTA_DISABLE_ECHO //envoyer des messages sans demander à la destination de renvoyer le message // Mysensors advanced settings // #define MY_TRANSPORT_WAIT_READY_MS 3000 /*Tempo d'attente de mis en Com, des millisecondes - à placer avant Mysensors.h*/ // #define MY_SPLASH_SCREEN_DISABLED /*désactive écran de démarrage MySensors (économie 120oct. en flash)*/ #define MY_NODE_ID 32 /*Node en ID static*/ /* ----- Module TTL-RS485 ----*/ #define MY_RS485 /*Apl du transport RS485 (protocol?)*/ #define MY_RS485_DE_PIN 2 /*Cmd DE pin*/ #define MY_RS485_BAUD_RATE 9600 /*Set RS485 baud rate to use*/ #define MY_REPEATER_FEATURE /*Activer fonctionnalité de répéteur du nœud*/ #include <MySensors.h> #include <Bounce2.h> // ------ objet ------ #define RELAY_PIN 7 /*Pin Relay-DO*/ #define BBUTTON_PIN 6 /*Pin boton-DI*/ #define CHILD_ID_R 3 /*Id du Relay*/ #define CHILD_ID_B 4 /*Id du bouton poussoir*/ #define RELAY_ON 1 #define RELAY_OFF 0 //----- Instancier objet Bounce ------ Bounce debouncer = Bounce(); int oldValue=0; bool state; // ------ Mysensors ------- MyMessage msg(CHILD_ID_R,V_STATUS); /*Relay*/ MyMessage msg1(CHILD_ID_B,V_TRIPPED); /*Boton*/ void setup() { pinMode (RELAY_PIN,OUTPUT); /*config pin relay*/ digitalWrite(RELAY_PIN, RELAY_OFF); /*désactive Relay au démarrage*/ pinMode(BBUTTON_PIN,INPUT_PULLUP) ; /*Configure Pin en input et Active pull-up interne*/ debouncer.attach(BBUTTON_PIN); /*configurez l'instance Bounce*/ debouncer.interval(5); /*interval in ms*/ // send(msg.set(value==HIGH ? 1 : 0)); /*Relay } void presentation() { sendSketchInfo("DiDo node 32", "2.0"); /*info version sketch à la passerelle*/ /*Mysenors Enregistre Child and Gw*/ present(CHILD_ID_R, S_BINARY); /*Relay*/ present(CHILD_ID_B, S_DOOR); /*Boton*/ /* requetes/demandes à un noeud ou GW une variable*/ request(CHILD_ID_R, V_STATUS); /*Relay*/ request(CHILD_ID_B, V_STATUS); /*Boton*/ } void loop() { /*Vérifie un changement d'etat sur les entrées numérique et envoye la nouvelle valeur*/ debouncer.update(); /*Update the Bounce instances*/ int value = debouncer.read(); /*Get the updated value*/ /*Relay*/ // if (valueR != oldValueR) { // send(msg.set(valueR==HIGH ? 1 : 0)); /*Envoyer la nouvelle valeur*/ // Serial.println ("Changement d'etat bouton A"); // oldValueR = valueR; // } /*bouton*/ if (value != oldValue) { send(msg1.set(value==HIGH ? 1 : 0)); // Envoyer la nouvelle valeur Serial.println ("Changement d'etat bouton "); oldValue = value; } } void receive(const MyMessage &message) { // attente qu'un seul type de message du contrôleur , vérifier. if (message.isAck()) { Serial.println("Ceci est un accusé de réception de la passerelle"); } if (message.type == V_STATUS) //V_STATUS ancien V_LIGHT { state = message.getBool (); digitalWrite(RELAY_PIN, state?RELAY_ON:RELAY_OFF); // Changer l'état du relais //if (message.getType()==V_STATUS) { // Change relay state // digitalWrite(message.getSensor() - RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); } } // -------------------- END PGM --------------------------- -
exit status 1 : 'value' was not declared in this scope
but why in the setup ?
you have to put it in Loop () ?//-----------Mars.2022------- Node 32 --------- MySensors DI DO MyController -----------------// // #define MY_DEBUG /*Enable debug prints to serial monitor*/ // #define MY_DEBUG_OTA_DISABLE_ECHO //envoyer des messages sans demander à la destination de renvoyer le message // Mysensors advanced settings // #define MY_TRANSPORT_WAIT_READY_MS 3000 /*Tempo d'attente de mis en Com, des millisecondes - à placer avant Mysensors.h*/ // #define MY_SPLASH_SCREEN_DISABLED /*désactive écran de démarrage MySensors (économie 120oct. en flash)*/ #define MY_NODE_ID 32 /*Node en ID static*/ /* ----- Module TTL-RS485 ----*/ #define MY_RS485 /*Apl du transport RS485 (protocol?)*/ #define MY_RS485_DE_PIN 2 /*Cmd DE pin*/ #define MY_RS485_BAUD_RATE 9600 /*Set RS485 baud rate to use*/ #define MY_REPEATER_FEATURE /*Activer fonctionnalité de répéteur du nœud*/ #include <MySensors.h> #include <Bounce2.h> // ------ objet ------ #define RELAY_PIN 7 /*Pin Relay-DO*/ #define BBUTTON_PIN 6 /*Pin boton-DI*/ #define CHILD_ID_R 3 /*Id du Relay*/ #define CHILD_ID_B 4 /*Id du bouton poussoir*/ #define RELAY_ON 1 #define RELAY_OFF 0 //----- Instancier objet Bounce ------ Bounce debouncer = Bounce(); int oldValue=0; bool state; // ------ Mysensors ------- MyMessage msg(CHILD_ID_R,V_STATUS); /*Relay*/ MyMessage msg1(CHILD_ID_B,V_TRIPPED); /*Boton*/ void setup() { pinMode (RELAY_PIN,OUTPUT); /*config pin relay*/ digitalWrite(RELAY_PIN, RELAY_OFF); /*désactive Relay au démarrage*/ pinMode(BBUTTON_PIN,INPUT_PULLUP) ; /*Configure Pin en input et Active pull-up interne*/ debouncer.attach(BBUTTON_PIN); /*configurez l'instance Bounce*/ debouncer.interval(5); /*interval in ms*/ // send(msg.set(value==HIGH ? 1 : 0)); /*Relay } void presentation() { sendSketchInfo("DiDo node 32", "2.0"); /*info version sketch à la passerelle*/ /*Mysenors Enregistre Child and Gw*/ present(CHILD_ID_R, S_BINARY); /*Relay*/ present(CHILD_ID_B, S_DOOR); /*Boton*/ /* requetes/demandes à un noeud ou GW une variable*/ request(CHILD_ID_R, V_STATUS); /*Relay*/ request(CHILD_ID_B, V_STATUS); /*Boton*/ } void loop() { /*Vérifie un changement d'etat sur les entrées numérique et envoye la nouvelle valeur*/ debouncer.update(); /*Update the Bounce instances*/ int value = debouncer.read(); /*Get the updated value*/ /*Relay*/ // if (valueR != oldValueR) { // send(msg.set(valueR==HIGH ? 1 : 0)); /*Envoyer la nouvelle valeur*/ // Serial.println ("Changement d'etat bouton A"); // oldValueR = valueR; // } /*bouton*/ if (value != oldValue) { send(msg1.set(value==HIGH ? 1 : 0)); // Envoyer la nouvelle valeur Serial.println ("Changement d'etat bouton "); oldValue = value; } } void receive(const MyMessage &message) { // attente qu'un seul type de message du contrôleur , vérifier. if (message.isAck()) { Serial.println("Ceci est un accusé de réception de la passerelle"); } if (message.type == V_STATUS) //V_STATUS ancien V_LIGHT { state = message.getBool (); digitalWrite(RELAY_PIN, state?RELAY_ON:RELAY_OFF); // Changer l'état du relais //if (message.getType()==V_STATUS) { // Change relay state // digitalWrite(message.getSensor() - RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); } } // -------------------- END PGM ---------------------------@JeeLet the
value, you have to set.
V_STATUSis not available in MyController, since it is not reported yet.
adding insetupsends the data only once. If you would like to retain the old status from MyController in your node, remove thesend(msg.set(value==HIGH ? 1 : 0));from your setup and createV_STATUSmanually in MyController- add new field in
Resources >> Fields >> Add,
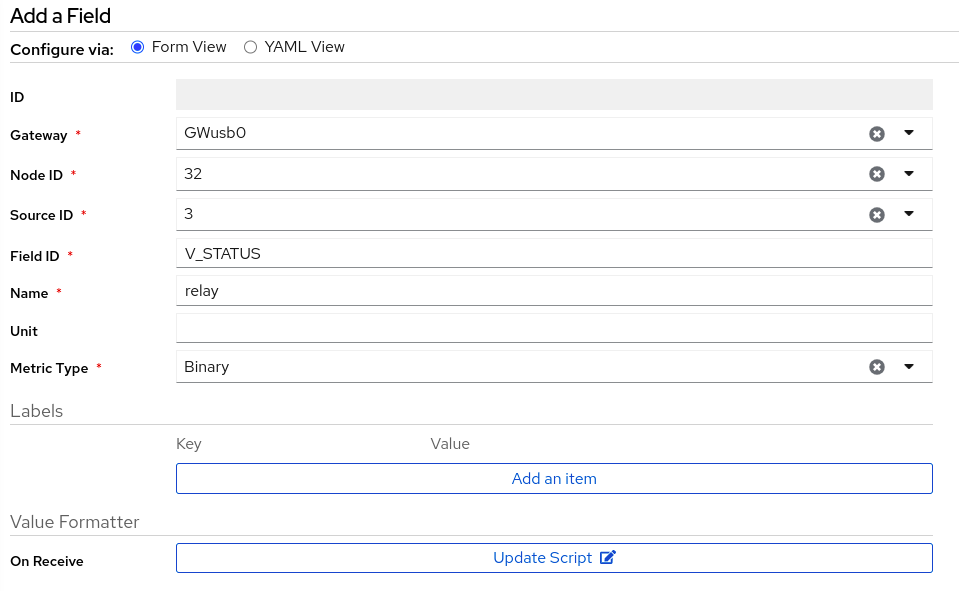
- add new field in
-
https://forum.mycontroller.org/
integration of motioneye in MyC
Base OdroidC2/Armbian buster et Cam arducam (libcamera) :clown_face:
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login