Scrolling Text sensor node with new V_TEXT
-
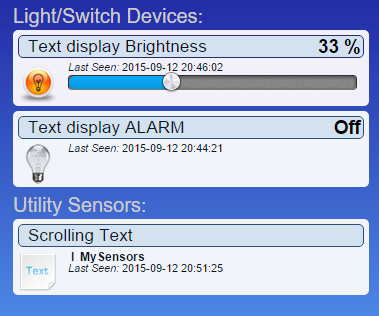
Another experiment for the V_TEXT variable/ sensor. Including brightness & speed setting and special Alarm function.
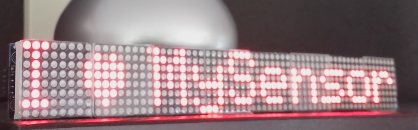
A scrolling display to let the family now that the dog needs walking... nothing more than 1 nano, 8 (or whatever number) of displays with max7219 controllera radio and a few cables
Total cost: €18 (with 8 displays)in Domoticz:
Built around the very versatile "Parola" driver library(I will upload a video when I know how to .. ;-))
https://www.youtube.com/watch?v=gCKTm427_Zc/* PROJECT: MySensors / Scrolling Text display PROGRAMMER: AWI DATE: september 12, 2015/ last update: september 12, 2015 FILE: AWI_scroll_MAX.ino LICENSE: Public domain Hardware: tbd ..Ceech - ATmega328p board w/ NRF24l01 and MySensors 1.5 () Special: Need to use MySensors development edition SUMMARY: 3 S_xx devices for scrolling text - Displays a scrolling text from a "V_TEXT" variable - additional dimmer sensor for controlling display brightness - 'Alarm' switch. If "On", overrides the text display to display ALARM message - You can also input messages from the Serial monitor (testing) Uses excellent MD_MAX72XX library Remarks: Fixed node-id */ // Use the MD_MAX72XX library to scroll text on the display with the use of the callback function // to control what is scrolled on the display text. // You need to set the used display in the library MD_MAX72XX.h // User can enter text on the serial monitor and this will display as a // Speed for the display is controlled by a pot on SPEED_IN analog in. #include <MD_MAX72xx.h> // multipurpose library for MAX72xx diaplay driver https://parola.codeplex.com/ #include <MySensor.h> // Mysensor network #include <SPI.h> #include <Time.h> //http://playground.arduino.cc/Code/Time #define USE_POT_CONTROL 0 // enable Scroll speed potentiometer #define PRINT_CALLBACK 0 // Macro to simplify serial print #define PRINT(s, v) { Serial.print(F(s)); Serial.print(v); } // Define the number of devices we have in the chain and the hardware interface // need to be adapted to your setup const int MAX_DEVICES = 8 ; // number of 8x8 displays const int CLK_PIN = 7 ; // SPI like clock const int DATA_PIN = 8 ; // SPI like data const int CS_PIN = 6 ; // SPI like select // Parola is able to use SPI hardware interface, not testted in combination with MySensors // MD_MAX72XX mx = MD_MAX72XX(CS_PIN, MAX_DEVICES); // now use Arbitrary pins MD_MAX72XX mx = MD_MAX72XX(DATA_PIN, CLK_PIN, CS_PIN, MAX_DEVICES); // instantiate one display chain // Scrolling parameters, you can attach normal potentiometer to A5, Vcc, Gnd #if USE_POT_CONTROL const int SPEED_IN = A5 ; #else const int SCROLL_DELAY = 20 ; // in milliseconds #endif // USE_POT_CONTROL const int CHAR_SPACING = 1 ; // pixels between characters // MySensors constants & variables const byte nodeId = 51 ; // MySensors fixed node id const byte messageCHILD = 8 ; // Text from ControllerLCD const byte brightnessChild = 9 ; // Brightness of display const byte alarmChild = 10 ; // Display Alarm text (overrides normal text) boolean timeReceived = false ; // Flag to indicate time received // Display constants & variables byte textBrightness = 1 ; // brightness of display (between 0 - MAX_INTENSITY (0xF) byte textOnOff = true ; // textOnOff = ! shutdown boolean textAlarm = false ; // Alarm (switch S_BINARY) // Global message buffers shared by MySensors and Scrolling functions const int BUF_SIZE = 25 ; // max payload for MySensors(NRF24l01) char curMessage[BUF_SIZE]; // current displayed message char newMessage[BUF_SIZE]; // next message to be displayed if available bool newMessageAvailable = false ; // new message available flag uint16_t scrollDelay; // in milliseconds // *** Definition and initialisation // define the MySensor network (1.5) MyTransportNRF24 transport(9,10); // Sensoduino (8,7) Ceech board, 3.3v (7,8) (pin default 9,10) MySensor gw(transport); // Initialize messages for sensor network MyMessage textMsg(messageCHILD, V_TEXT); // message for Sending Text to Controller /* MD_MAX72XX functions: can be found in the documentation for the library, * no need to customtize callback & scroll routines (unless you want to...) */ uint8_t scrollDataSource(uint8_t dev, MD_MAX72XX::transformType_t t) // Callback function for data that is required for scrolling into the display { static char *p = curMessage; static uint8_t state = 0; static uint8_t curLen, showLen; static uint8_t cBuf[8]; uint8_t colData; // finite state machine to control what we do on the callback switch(state) { case 0: // Load the next character from the font table showLen = mx.getChar(*p++, sizeof(cBuf)/sizeof(cBuf[0]), cBuf); curLen = 0; state++; // if we reached end of message, reset the message pointer if (*p == '\0') { p = curMessage; // reset the pointer to start of message if (newMessageAvailable) // there is a new message waiting { strcpy(curMessage, newMessage); // copy it in newMessageAvailable = false; } } // !! deliberately fall through to next state to start displaying case 1: // display the next part of the character colData = cBuf[curLen++]; if (curLen == showLen) // end of character insert interchar space { showLen = CHAR_SPACING; curLen = 0; state = 2; } break; case 2: // display inter-character spacing (blank column) colData = 0; curLen++; if (curLen == showLen) state = 0; break; default: state = 0; } return(colData); } // Callback (not used here) void scrollDataSink(uint8_t dev, MD_MAX72XX::transformType_t t, uint8_t col){ // Callback function for data that is being scrolled off the display #if PRINT_CALLBACK Serial.print("\n cb "); Serial.print(dev); Serial.print(' '); Serial.print(t); Serial.print(' '); Serial.println(col); #endif } // non-blocking text display to be used in loop (call frequently) void scrollText(void){ static uint32_t prevTime = 0; if (millis()-prevTime >= scrollDelay){ // Is it time to scroll the text? mx.transform(MD_MAX72XX::TSL); // scroll along - the callback will load all the data prevTime = millis(); // starting point for next time } } // sets the scroll delay (read from potentiometer if enabled) uint16_t getScrollDelay(void){ #if USE_POT_CONTROL uint16_t t = analogRead(SPEED_IN); t = map(t, 0, 1023, 25, 250); return(t); #else return(SCROLL_DELAY); #endif } void setup(){ // set up the display first mx.begin(); // initialize display chain mx.setShiftDataInCallback(scrollDataSource); // define function to get the scrolldata (returned as int8) //mx.setShiftDataOutCallback(scrollDataSink); // not used mx.control(MD_MAX72XX::INTENSITY, 0x01); #if USE_POT_CONTROL // initialize speed potentiometer if enabled pinMode(SPEED_IN, INPUT); #else scrollDelay = SCROLL_DELAY; #endif strcpy(curMessage, "I \x03 MySensors "); // first message on display newMessage[0] = '\0'; // new message initialized to empty // Setup MySensors //Serial in Sensor network = 115200 gw.begin(incomingMessage, nodeId); // this node is 51 fixed //Send the sensor node sketch version information to the gateway gw.sendSketchInfo("AWI Scroll MAX 51", "1.1"); gw.present(messageCHILD, S_INFO, "Text line Scroll"); // new S_type 20150905 (not know by domoticz) gw.present(alarmChild, S_BINARY, "Alarm display"); // to display alarm text gw.present(brightnessChild, S_DIMMER, "Text brightness"); // new S_type 20150905 (not know by domoticz) //gw.send(textMsg.set("-")); // initialize the V_TEXT at controller for sensor to none (trick for Domoticz) gw.request(messageCHILD, V_TEXT, 0); // request value from controller // Initializations gw.requestTime(receiveTime); // get the time from controller (handled by receiveTime) } // loop only uses non-blocking functions void loop() { gw.process(); static unsigned long lastUpdate ; // Static hold the last update time unsigned long now = millis(); scrollDelay = getScrollDelay(); // update scroll delay from potentiometer readSerial(); // Check for new conditions & ask for new information from controller every 10 seconds if (now-lastUpdate > 10000){ if (textAlarm){ // if alarmstatus: override all text and set max intensity strcpy(curMessage, " ALARM "); mx.control(MD_MAX72XX::INTENSITY, MAX_INTENSITY); // set current brightness mx.control(MD_MAX72XX::SHUTDOWN, false) ; } else { // standard (non Alarm actions) mx.control(MD_MAX72XX::INTENSITY, textBrightness); // set current brightness mx.control(MD_MAX72XX::SHUTDOWN, textOnOff) ; gw.request(messageCHILD, V_TEXT, 0); // request new value from controller } lastUpdate = now; } scrollText(); } // This is called when a new time value was received void receiveTime(unsigned long controllerTime) { Serial.print("Time value received: "); Serial.println(controllerTime); setTime(controllerTime); // time from controller timeReceived = true; } // This is called when a message is received void incomingMessage(const MyMessage &message) { Serial.print("Message: "); Serial.print(message.sensor); Serial.print(", Message: "); Serial.println(message.getString()); if (message.sensor == messageCHILD){ if (message.type==V_TEXT) { // Text content strcpy(newMessage, message.getString()); // copy it in newMessageAvailable = true ; } } else if (message.sensor == alarmChild) { if (message.type==V_STATUS) { // True/ false content textAlarm = message.getBool()?true:false ; // set alarmflag Serial.print("TextAlarm: "); Serial.println(textAlarm); } } else if (message.sensor == brightnessChild){ if (message.type==V_PERCENTAGE) { // Level 0..100 content textBrightness = map(message.getInt(),0, 100, 0, MAX_INTENSITY ) ; // map to brightnesslevel Serial.print("TextBrightness: "); Serial.println(textBrightness); } else if (message.type==V_STATUS) { // Display on/off textOnOff = message.getBool()?false:true ; // set shutdown/ !on/off Serial.print("Text on/off: "); Serial.println(textOnOff); } } } // Testing purposes: input routine character buffer. Reads serial characters in buffer newMessage. // sets flag newMessageAvailable to true if completed void readSerial(void) { static uint8_t putIndex = 0; while (Serial.available()) { newMessage[putIndex] = (char)Serial.read(); if ((newMessage[putIndex] == '\n') || (putIndex >= BUF_SIZE-3)) // end of message character or full buffer { // put in a message separator and end the string newMessage[putIndex++] = ' '; newMessage[putIndex] = '\0'; // restart the index for next filling spree and flag we have a message waiting putIndex = 0; newMessageAvailable = true; } else // Just save the next char in next location newMessage[putIndex++]; } } -
-
-
found this library for scrolling effect https://code.google.com/p/arudino-maxmatrix-library/.
-
found this library for scrolling effect https://code.google.com/p/arudino-maxmatrix-library/.
-
Umm, this is awesome! Looks like I have a tinker project coming up!
-
Looks great. Is it posible (Or do you think it will be) to sen dynamic values to the display from Domoticz? Like the temperature or soil moist procentage.
-
Looks great. Is it posible (Or do you think it will be) to sen dynamic values to the display from Domoticz? Like the temperature or soil moist procentage.
@popunonkok it is very possible. In fact this is what I'm doing. You need to work on the controller side. For domoticz you can use a lua time script which sends new text every x time. For long messages you will need to script a fifo with multiple text messages.
-
Is it possible to send text to the node without a request call from the node itself?
The example is not clear on this point and the json example only sets the text value within Domoticz, right?
-
Is it possible to send text to the node without a request call from the node itself?
The example is not clear on this point and the json example only sets the text value within Domoticz, right?
@GertSanders Domoticz does not "push" the Text value when changed. The published sketch "asks" periodically for the Text value. What I do now is create a Switch (S_BINARY/ light) with function "New text available". This switch triggers the polling sequence.
-
@GizMoCuz : It would be nice to be able to define the text of the S_INFO sensor in de UI of Domoticz, instead of only via json. I'm not capable of programming that myself, but it would make the use of text easier. I already log all incoming SMS messages into my SMS connected sensor in V_TEXT and have it this way a nice view on what nodes are sending to my SMS passthrough node or what SMS messages are received into my MySensors network. I know Domoticz has it's own SMS interface, but my node is capable of switching on stuff based on directly received SMS commands, and with V_TEXT I can now follow what is happening without needing a serial connection to the node. I should be clear that I'm a big fan of Domoticz :-)
-
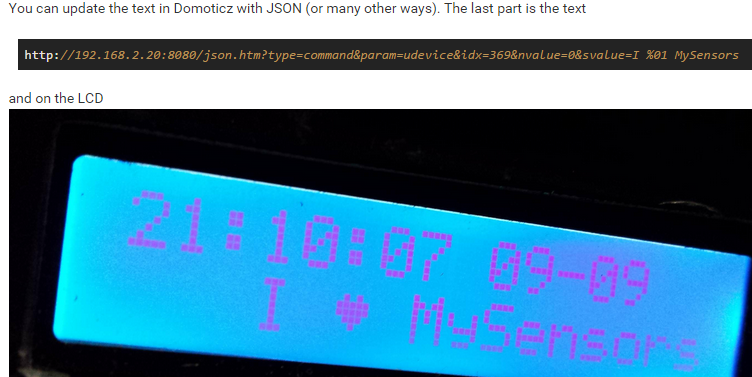
You can send messages as done here? http://forum.mysensors.org/topic/1957/lcd-clock-and-text-sensor-node-with-new-v_text
-
You can send messages as done here? http://forum.mysensors.org/topic/1957/lcd-clock-and-text-sensor-node-with-new-v_text
-
What am i missing, Because i get this when i try to compile it
Arduino:1.6.5 (Mac OS X), Kort:"Arduino Nano, ATmega328"
ScrollingText:55: error: 'V_TEXT' was not declared in this scope
ScrollingText.ino: In function 'void setup()':
ScrollingText:166: error: 'S_INFO' was not declared in this scope
ScrollingText:170: error: 'V_TEXT' was not declared in this scope
ScrollingText.ino: In function 'void loop()':
ScrollingText:191: error: 'V_TEXT' was not declared in this scope
ScrollingText.ino: In function 'void incomingMessage(const MyMessage&)':
ScrollingText:210: error: 'V_TEXT' was not declared in this scope
'V_TEXT' was not declared in this scope
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login