Air Humidity Sensor can't reach Gateway
-
Hi folks,
I'm just getting started and having a hard time getting my Arduino Pro Mini talking to my Raspberry pi running Domoticz. Both client and gateway are using the nRF24L01+ module.
I have a DHT22 sensor connected to the Arduino and can confirm that it's reading values correctly (using a DHT example). I'm now running the following code, adapted from the Air Humidity examples page:
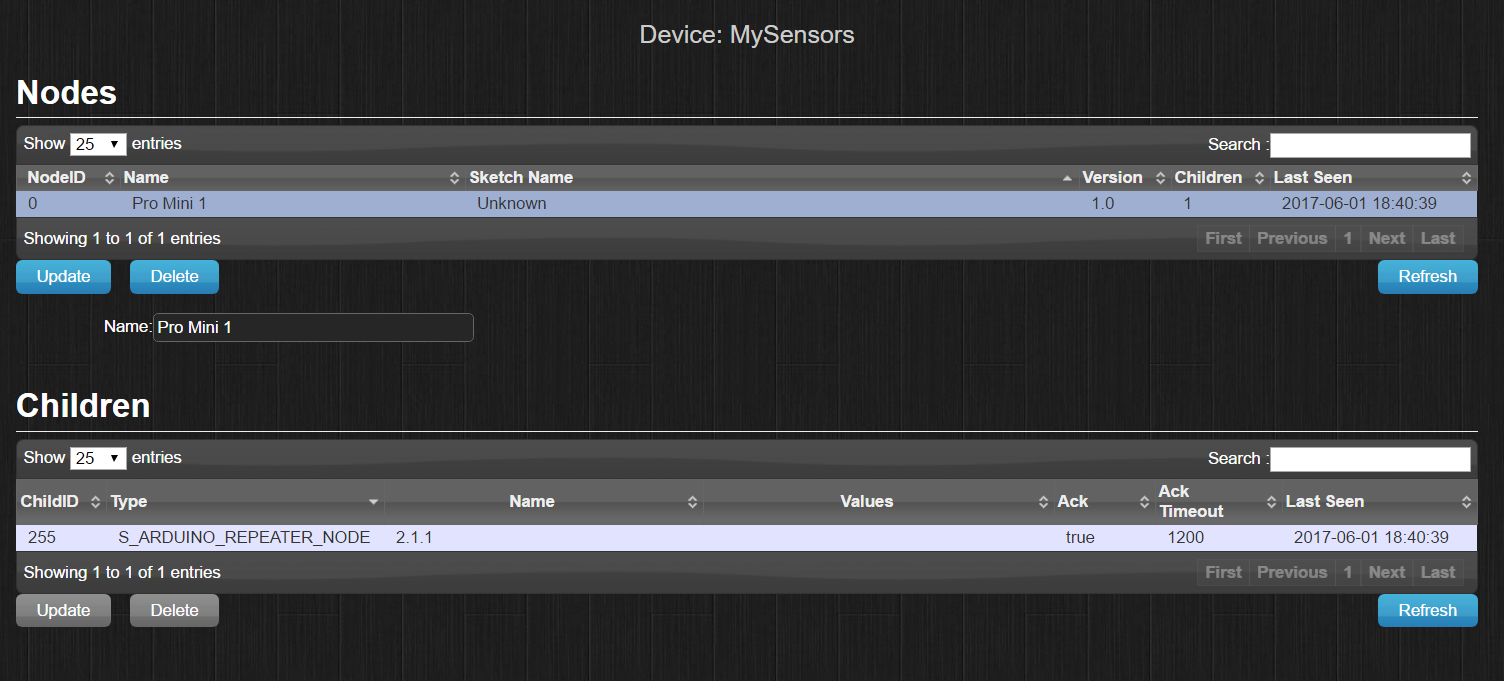
/** * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2015 Sensnology AB * Full contributor list: https://github.com/mysensors/Arduino/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * REVISION HISTORY * Version 1.0: Henrik EKblad * Version 1.1 - 2016-07-20: Converted to MySensors v2.0 and added various improvements - Torben Woltjen (mozzbozz) * * DESCRIPTION * This sketch provides an example of how to implement a humidity/temperature * sensor using a DHT11/DHT-22. * * For more information, please visit: * http://www.mysensors.org/build/humidity * */ // Enable debug prints #define MY_DEBUG #define MY_NODE_ID 255 #define MY_PARENT_NODE_ID 0 #define MY_PARENT_NODE_IS_STATIC // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 //#define MY_RS485 //#define MY_RF24_PA_LEVEL RF24_PA_MAX #define MY_RF24_PA_LEVEL RF24_PA_MAX #define MY_RF24_DATARATE RF24_2MBPS #include <SPI.h> #include <MySensors.h> #include <DHT.h> // Set this to the pin you connected the DHT's data pin to #define DHT_DATA_PIN 3 // Set this offset if the sensor has a permanent small offset to the real temperatures #define SENSOR_TEMP_OFFSET 0 // Sleep time between sensor updates (in milliseconds) // Must be >1000ms for DHT22 and >2000ms for DHT11 static const uint64_t UPDATE_INTERVAL = 5000; // Force sending an update of the temperature after n sensor reads, so a controller showing the // timestamp of the last update doesn't show something like 3 hours in the unlikely case, that // the value didn't change since; // i.e. the sensor would force sending an update every UPDATE_INTERVAL*FORCE_UPDATE_N_READS [ms] static const uint8_t FORCE_UPDATE_N_READS = 10; #define CHILD_ID_HUM 10 #define CHILD_ID_TEMP 11 float lastTemp; float lastHum; uint8_t nNoUpdatesTemp; uint8_t nNoUpdatesHum; bool metric = true; MyMessage msgHum(CHILD_ID_HUM, V_HUM); MyMessage msgTemp(CHILD_ID_TEMP, V_TEMP); DHT dht; void presentation() { // Send the sketch version information to the gateway sendSketchInfo("TemperatureAndHumidity", "1.1"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_HUM, S_HUM); present(CHILD_ID_TEMP, S_TEMP); metric = getControllerConfig().isMetric; } void setup() { dht.setup(DHT_DATA_PIN); // set data pin of DHT sensor if (UPDATE_INTERVAL <= dht.getMinimumSamplingPeriod()) { Serial.println("Warning: UPDATE_INTERVAL is smaller than supported by the sensor!"); } // Sleep for the time of the minimum sampling period to give the sensor time to power up // (otherwise, timeout errors might occure for the first reading) sleep(dht.getMinimumSamplingPeriod()); } void loop() { // Force reading sensor, so it works also after sleep() dht.readSensor(true); // Get temperature from DHT library float temperature = dht.getTemperature(); if (isnan(temperature)) { Serial.println("Failed reading temperature from DHT!"); } else if (temperature != lastTemp || nNoUpdatesTemp == FORCE_UPDATE_N_READS) { // Only send temperature if it changed since the last measurement or if we didn't send an update for n times lastTemp = temperature; if (!metric) { temperature = dht.toFahrenheit(temperature); } // Reset no updates counter nNoUpdatesTemp = 0; temperature += SENSOR_TEMP_OFFSET; send(msgTemp.set(temperature, 1)); #ifdef MY_DEBUG Serial.print("T: "); Serial.println(temperature); #endif } else { // Increase no update counter if the temperature stayed the same nNoUpdatesTemp++; } // Get humidity from DHT library float humidity = dht.getHumidity(); if (isnan(humidity)) { Serial.println("Failed reading humidity from DHT"); } else if (humidity != lastHum || nNoUpdatesHum == FORCE_UPDATE_N_READS) { // Only send humidity if it changed since the last measurement or if we didn't send an update for n times lastHum = humidity; // Reset no updates counter nNoUpdatesHum = 0; send(msgHum.set(humidity, 1)); #ifdef MY_DEBUG Serial.print("H: "); Serial.println(humidity); #endif } else { // Increase no update counter if the humidity stayed the same nNoUpdatesHum++; } // Sleep for a while to save energy sleep(UPDATE_INTERVAL); }On the Arduino side, I seem to get stuck in a loop where the originating message doesn't get through to my gateway:
0 MCO:BGN:INIT NODE,CP=RNNNA---,VER=2.2.0-beta 49 TSM:INIT 51 TSF:WUR:MS=0 57 TSM:INIT:TSP OK 59 TSM:INIT:STATID=10 61 TSF:SID:OK,ID=10 63 TSM:FPAR 65 TSM:FPAR:STATP=0 67 TSM:ID 67 TSM:ID:OK 69 TSM:UPL 98 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=NACK:1 2107 TSM:UPL 2136 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=1,st=NACK:1 4145 TSM:UPL 4173 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=2,st=NACK:1 6184 TSM:UPL 6213 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=3,st=NACK:1 8222 !TSM:UPL:FAIL 8224 TSM:FPAR 8224 TSM:FPAR:STATP=0 8226 TSM:ID 8228 TSM:ID:OK 8230 TSM:UPL 8259 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=4,st=NACK:1 10268 TSM:UPL 10297 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=5,st=NACK:1 12306 TSM:UPL 12335 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=6,st=NACK:1 14344 TSM:UPL 14372 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=7,st=NACK:1 16384 !TSM:UPL:FAILSomething seems to be getting through to my RPi gateway, though, because Domoticz shows the following:
Any suggestions would be very welcome. I've tried adding a capacitor across the power supply as suggested, as well as changing the transmit power levels on the Arduino radio, to no avail.
Thanks in advance!
-
Hi folks,
I'm just getting started and having a hard time getting my Arduino Pro Mini talking to my Raspberry pi running Domoticz. Both client and gateway are using the nRF24L01+ module.
I have a DHT22 sensor connected to the Arduino and can confirm that it's reading values correctly (using a DHT example). I'm now running the following code, adapted from the Air Humidity examples page:
/** * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2015 Sensnology AB * Full contributor list: https://github.com/mysensors/Arduino/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * REVISION HISTORY * Version 1.0: Henrik EKblad * Version 1.1 - 2016-07-20: Converted to MySensors v2.0 and added various improvements - Torben Woltjen (mozzbozz) * * DESCRIPTION * This sketch provides an example of how to implement a humidity/temperature * sensor using a DHT11/DHT-22. * * For more information, please visit: * http://www.mysensors.org/build/humidity * */ // Enable debug prints #define MY_DEBUG #define MY_NODE_ID 255 #define MY_PARENT_NODE_ID 0 #define MY_PARENT_NODE_IS_STATIC // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 //#define MY_RS485 //#define MY_RF24_PA_LEVEL RF24_PA_MAX #define MY_RF24_PA_LEVEL RF24_PA_MAX #define MY_RF24_DATARATE RF24_2MBPS #include <SPI.h> #include <MySensors.h> #include <DHT.h> // Set this to the pin you connected the DHT's data pin to #define DHT_DATA_PIN 3 // Set this offset if the sensor has a permanent small offset to the real temperatures #define SENSOR_TEMP_OFFSET 0 // Sleep time between sensor updates (in milliseconds) // Must be >1000ms for DHT22 and >2000ms for DHT11 static const uint64_t UPDATE_INTERVAL = 5000; // Force sending an update of the temperature after n sensor reads, so a controller showing the // timestamp of the last update doesn't show something like 3 hours in the unlikely case, that // the value didn't change since; // i.e. the sensor would force sending an update every UPDATE_INTERVAL*FORCE_UPDATE_N_READS [ms] static const uint8_t FORCE_UPDATE_N_READS = 10; #define CHILD_ID_HUM 10 #define CHILD_ID_TEMP 11 float lastTemp; float lastHum; uint8_t nNoUpdatesTemp; uint8_t nNoUpdatesHum; bool metric = true; MyMessage msgHum(CHILD_ID_HUM, V_HUM); MyMessage msgTemp(CHILD_ID_TEMP, V_TEMP); DHT dht; void presentation() { // Send the sketch version information to the gateway sendSketchInfo("TemperatureAndHumidity", "1.1"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_HUM, S_HUM); present(CHILD_ID_TEMP, S_TEMP); metric = getControllerConfig().isMetric; } void setup() { dht.setup(DHT_DATA_PIN); // set data pin of DHT sensor if (UPDATE_INTERVAL <= dht.getMinimumSamplingPeriod()) { Serial.println("Warning: UPDATE_INTERVAL is smaller than supported by the sensor!"); } // Sleep for the time of the minimum sampling period to give the sensor time to power up // (otherwise, timeout errors might occure for the first reading) sleep(dht.getMinimumSamplingPeriod()); } void loop() { // Force reading sensor, so it works also after sleep() dht.readSensor(true); // Get temperature from DHT library float temperature = dht.getTemperature(); if (isnan(temperature)) { Serial.println("Failed reading temperature from DHT!"); } else if (temperature != lastTemp || nNoUpdatesTemp == FORCE_UPDATE_N_READS) { // Only send temperature if it changed since the last measurement or if we didn't send an update for n times lastTemp = temperature; if (!metric) { temperature = dht.toFahrenheit(temperature); } // Reset no updates counter nNoUpdatesTemp = 0; temperature += SENSOR_TEMP_OFFSET; send(msgTemp.set(temperature, 1)); #ifdef MY_DEBUG Serial.print("T: "); Serial.println(temperature); #endif } else { // Increase no update counter if the temperature stayed the same nNoUpdatesTemp++; } // Get humidity from DHT library float humidity = dht.getHumidity(); if (isnan(humidity)) { Serial.println("Failed reading humidity from DHT"); } else if (humidity != lastHum || nNoUpdatesHum == FORCE_UPDATE_N_READS) { // Only send humidity if it changed since the last measurement or if we didn't send an update for n times lastHum = humidity; // Reset no updates counter nNoUpdatesHum = 0; send(msgHum.set(humidity, 1)); #ifdef MY_DEBUG Serial.print("H: "); Serial.println(humidity); #endif } else { // Increase no update counter if the humidity stayed the same nNoUpdatesHum++; } // Sleep for a while to save energy sleep(UPDATE_INTERVAL); }On the Arduino side, I seem to get stuck in a loop where the originating message doesn't get through to my gateway:
0 MCO:BGN:INIT NODE,CP=RNNNA---,VER=2.2.0-beta 49 TSM:INIT 51 TSF:WUR:MS=0 57 TSM:INIT:TSP OK 59 TSM:INIT:STATID=10 61 TSF:SID:OK,ID=10 63 TSM:FPAR 65 TSM:FPAR:STATP=0 67 TSM:ID 67 TSM:ID:OK 69 TSM:UPL 98 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=NACK:1 2107 TSM:UPL 2136 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=1,st=NACK:1 4145 TSM:UPL 4173 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=2,st=NACK:1 6184 TSM:UPL 6213 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=3,st=NACK:1 8222 !TSM:UPL:FAIL 8224 TSM:FPAR 8224 TSM:FPAR:STATP=0 8226 TSM:ID 8228 TSM:ID:OK 8230 TSM:UPL 8259 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=4,st=NACK:1 10268 TSM:UPL 10297 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=5,st=NACK:1 12306 TSM:UPL 12335 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=6,st=NACK:1 14344 TSM:UPL 14372 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=7,st=NACK:1 16384 !TSM:UPL:FAILSomething seems to be getting through to my RPi gateway, though, because Domoticz shows the following:
Any suggestions would be very welcome. I've tried adding a capacitor across the power supply as suggested, as well as changing the transmit power levels on the Arduino radio, to no avail.
Thanks in advance!
@egfku - I would say its a range or power issue. I would start here: https://forum.mysensors.org/topic/666/debug-faq-and-how-ask-for-help and go through that. Also you can parse your code into this: https://www.mysensors.org/build/parser and get more info out of it.
Do you have capacitors on your radios? This is crucial! What distance are we talking about between node and gw? You can try moving they closer (or if they are really close - move them apart). Did you check the radio before using them (since there are alof of fake radios out there which perform really bad).
You can also try to change the settings on the since you have made that into your code. Might be that the radio is shouting to loud (and/or not getting enough power to do so). How do you power the radios? Its really important and more important if you use the pa/lna version of the radio.
-
Hi folks,
I'm just getting started and having a hard time getting my Arduino Pro Mini talking to my Raspberry pi running Domoticz. Both client and gateway are using the nRF24L01+ module.
I have a DHT22 sensor connected to the Arduino and can confirm that it's reading values correctly (using a DHT example). I'm now running the following code, adapted from the Air Humidity examples page:
/** * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2015 Sensnology AB * Full contributor list: https://github.com/mysensors/Arduino/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * REVISION HISTORY * Version 1.0: Henrik EKblad * Version 1.1 - 2016-07-20: Converted to MySensors v2.0 and added various improvements - Torben Woltjen (mozzbozz) * * DESCRIPTION * This sketch provides an example of how to implement a humidity/temperature * sensor using a DHT11/DHT-22. * * For more information, please visit: * http://www.mysensors.org/build/humidity * */ // Enable debug prints #define MY_DEBUG #define MY_NODE_ID 255 #define MY_PARENT_NODE_ID 0 #define MY_PARENT_NODE_IS_STATIC // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 //#define MY_RS485 //#define MY_RF24_PA_LEVEL RF24_PA_MAX #define MY_RF24_PA_LEVEL RF24_PA_MAX #define MY_RF24_DATARATE RF24_2MBPS #include <SPI.h> #include <MySensors.h> #include <DHT.h> // Set this to the pin you connected the DHT's data pin to #define DHT_DATA_PIN 3 // Set this offset if the sensor has a permanent small offset to the real temperatures #define SENSOR_TEMP_OFFSET 0 // Sleep time between sensor updates (in milliseconds) // Must be >1000ms for DHT22 and >2000ms for DHT11 static const uint64_t UPDATE_INTERVAL = 5000; // Force sending an update of the temperature after n sensor reads, so a controller showing the // timestamp of the last update doesn't show something like 3 hours in the unlikely case, that // the value didn't change since; // i.e. the sensor would force sending an update every UPDATE_INTERVAL*FORCE_UPDATE_N_READS [ms] static const uint8_t FORCE_UPDATE_N_READS = 10; #define CHILD_ID_HUM 10 #define CHILD_ID_TEMP 11 float lastTemp; float lastHum; uint8_t nNoUpdatesTemp; uint8_t nNoUpdatesHum; bool metric = true; MyMessage msgHum(CHILD_ID_HUM, V_HUM); MyMessage msgTemp(CHILD_ID_TEMP, V_TEMP); DHT dht; void presentation() { // Send the sketch version information to the gateway sendSketchInfo("TemperatureAndHumidity", "1.1"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_HUM, S_HUM); present(CHILD_ID_TEMP, S_TEMP); metric = getControllerConfig().isMetric; } void setup() { dht.setup(DHT_DATA_PIN); // set data pin of DHT sensor if (UPDATE_INTERVAL <= dht.getMinimumSamplingPeriod()) { Serial.println("Warning: UPDATE_INTERVAL is smaller than supported by the sensor!"); } // Sleep for the time of the minimum sampling period to give the sensor time to power up // (otherwise, timeout errors might occure for the first reading) sleep(dht.getMinimumSamplingPeriod()); } void loop() { // Force reading sensor, so it works also after sleep() dht.readSensor(true); // Get temperature from DHT library float temperature = dht.getTemperature(); if (isnan(temperature)) { Serial.println("Failed reading temperature from DHT!"); } else if (temperature != lastTemp || nNoUpdatesTemp == FORCE_UPDATE_N_READS) { // Only send temperature if it changed since the last measurement or if we didn't send an update for n times lastTemp = temperature; if (!metric) { temperature = dht.toFahrenheit(temperature); } // Reset no updates counter nNoUpdatesTemp = 0; temperature += SENSOR_TEMP_OFFSET; send(msgTemp.set(temperature, 1)); #ifdef MY_DEBUG Serial.print("T: "); Serial.println(temperature); #endif } else { // Increase no update counter if the temperature stayed the same nNoUpdatesTemp++; } // Get humidity from DHT library float humidity = dht.getHumidity(); if (isnan(humidity)) { Serial.println("Failed reading humidity from DHT"); } else if (humidity != lastHum || nNoUpdatesHum == FORCE_UPDATE_N_READS) { // Only send humidity if it changed since the last measurement or if we didn't send an update for n times lastHum = humidity; // Reset no updates counter nNoUpdatesHum = 0; send(msgHum.set(humidity, 1)); #ifdef MY_DEBUG Serial.print("H: "); Serial.println(humidity); #endif } else { // Increase no update counter if the humidity stayed the same nNoUpdatesHum++; } // Sleep for a while to save energy sleep(UPDATE_INTERVAL); }On the Arduino side, I seem to get stuck in a loop where the originating message doesn't get through to my gateway:
0 MCO:BGN:INIT NODE,CP=RNNNA---,VER=2.2.0-beta 49 TSM:INIT 51 TSF:WUR:MS=0 57 TSM:INIT:TSP OK 59 TSM:INIT:STATID=10 61 TSF:SID:OK,ID=10 63 TSM:FPAR 65 TSM:FPAR:STATP=0 67 TSM:ID 67 TSM:ID:OK 69 TSM:UPL 98 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=NACK:1 2107 TSM:UPL 2136 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=1,st=NACK:1 4145 TSM:UPL 4173 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=2,st=NACK:1 6184 TSM:UPL 6213 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=3,st=NACK:1 8222 !TSM:UPL:FAIL 8224 TSM:FPAR 8224 TSM:FPAR:STATP=0 8226 TSM:ID 8228 TSM:ID:OK 8230 TSM:UPL 8259 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=4,st=NACK:1 10268 TSM:UPL 10297 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=5,st=NACK:1 12306 TSM:UPL 12335 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=6,st=NACK:1 14344 TSM:UPL 14372 !TSF:MSG:SEND,10-10-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=7,st=NACK:1 16384 !TSM:UPL:FAILSomething seems to be getting through to my RPi gateway, though, because Domoticz shows the following:
Any suggestions would be very welcome. I've tried adding a capacitor across the power supply as suggested, as well as changing the transmit power levels on the Arduino radio, to no avail.
Thanks in advance!
-
@egfku I'm a bit new at this stuff too so I could be off base, but isn't node ID 255 reserved for broadcast? Try setting the MY_NODE_ID to something between 1 and 254.
-
-
Hi everyone,
Thank you for your replies! I think @sundberg84 is probably right that there's something wrong with the radio attached to my Arduino. I did try adding a 10uF capacitor, changing the power source, as well as swapping out a different radio, but that didn't seem to help. I've ordered some MCP1702 voltage regulators that hopefully will improve things.
I did also try to directly specify the node ID, which is seen by my gateway, but it looks like the Arduino can't hear the gateway's response:
pi@rpi:~ $ sudo mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.1.1 mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.1.1 mysgw: TSF:LRT:OK mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: Listening for connections on 0.0.0.0:5003 mysgw: MCO:BGN:STP mysgw: MCO:BGN:INIT OK,TSP=1 mysgw: TSF:MSG:READ,128-128-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=128 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: !TSF:MSG:SEND,0-0-128-128,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=NACK:0 mysgw: TSF:MSG:READ,128-128-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=128 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: !TSF:MSG:SEND,0-0-128-128,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=NACK:0The parser says the gateway isn't getting acknowledged:
TSF:MSG:SEND,0-0-128-128,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=NACK:0
Sent Message
Sender: 0
Last Node: 0
Next Node: 128
Destination: 128
Sensor Id: 255
Command: INTERNAL
Message Type:I_FIND_PARENT_RESPONSE
Payload Type: P_BYTE
Payload Length: 1
Signing: 0
Failed uplink counter: 0
Status: NACK (OK=success, NACK=no radio ACK received)
Payload: 0Will keep testing and update if I get any joy!
-
Hi everyone,
Thank you for your replies! I think @sundberg84 is probably right that there's something wrong with the radio attached to my Arduino. I did try adding a 10uF capacitor, changing the power source, as well as swapping out a different radio, but that didn't seem to help. I've ordered some MCP1702 voltage regulators that hopefully will improve things.
I did also try to directly specify the node ID, which is seen by my gateway, but it looks like the Arduino can't hear the gateway's response:
pi@rpi:~ $ sudo mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.1.1 mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.1.1 mysgw: TSF:LRT:OK mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: Listening for connections on 0.0.0.0:5003 mysgw: MCO:BGN:STP mysgw: MCO:BGN:INIT OK,TSP=1 mysgw: TSF:MSG:READ,128-128-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=128 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: !TSF:MSG:SEND,0-0-128-128,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=NACK:0 mysgw: TSF:MSG:READ,128-128-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=128 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: !TSF:MSG:SEND,0-0-128-128,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=NACK:0The parser says the gateway isn't getting acknowledged:
TSF:MSG:SEND,0-0-128-128,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=NACK:0
Sent Message
Sender: 0
Last Node: 0
Next Node: 128
Destination: 128
Sensor Id: 255
Command: INTERNAL
Message Type:I_FIND_PARENT_RESPONSE
Payload Type: P_BYTE
Payload Length: 1
Signing: 0
Failed uplink counter: 0
Status: NACK (OK=success, NACK=no radio ACK received)
Payload: 0Will keep testing and update if I get any joy!
@egfku said in Air Humidity Sensor can't reach Gateway:
Sensor Id: 255
It cannot work like that. Node ID 255 is for broadcast, and for broadcast ACK will never be sent back.
You should first reset the eprom config that is now written in your arduino.for that, in Arduino menu open File/Examples/MySensors/ClearEpromConfig example sketch and run it.
Then put a sketch with the lines below commented :#define MY_NODE_ID 255 #define MY_PARENT_NODE_ID 0 #define MY_PARENT_NODE_IS_STATICAlso it doesn't seem to be a good idea to set data rate of NRF24 to 2MPS when you believe you have a radio communication/range problem. Keep the default value of 250K so you will have better range, for that comment the line below.
(Of course you must have the same config on your gateway)#define MY_RF24_DATARATE RF24_2MBPS -
Thanks for the note, @Nca78 . It seems like my systems defaults to an ID of 255, though. I swapped out another Pro Mini and another radio (debugged the Arduino side using the RF24 library), and now I'm seeing more traffic between the Arduino and the RPi, though it seems to fall over at receiving an ID.
Note that I ran the ClearEpromConfig example immediately before pushing the MotionSensor example (no changes, did not define MY_NODE_ID).
Arduino:
0 MCO:BGN:INIT NODE,CP=RNNNA--,VER=2.1.1 4 TSM:INIT 4 TSF:WUR:MS=0 12 TSM:INIT:TSP OK 14 TSM:FPAR 16 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 2025 !TSM:FPAR:NO REPLY 2027 TSM:FPAR 2029 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 2037 TSF:MSG:READ,0-0-255,s=255,c=3,t=8,pt=1,l=1,sg=0:0 2043 TSF:MSG:FPAR OK,ID=0,D=1 4038 TSM:FPAR:OK 4038 TSM:ID 4040 TSM:ID:REQ 4044 TSF:MSG:SEND,255-255-0-0,s=255,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 6051 TSM:ID 6051 TSM:ID:REQ 6055 TSF:MSG:SEND,255-255-0-0,s=255,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 8065 TSM:ID 8065 TSM:ID:REQ 8069 TSF:MSG:SEND,255-255-0-0,s=255,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 10076 TSM:ID 10076 TSM:ID:REQ 10080 TSF:MSG:SEND,255-255-0-0,s=255,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 12089 !TSM:ID:FAIL 12091 TSM:FAIL:CNT=1 12093 TSM:FAIL:PDT 22097 TSM:FAIL:RE-INIT 22099 TSM:INIT 22106 TSM:INIT:TSP OK 22110 TSM:FPAR 22112 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 24121 !TSM:FPAR:NO REPLY 24123 TSM:FPAR 24125 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 26134 !TSM:FPAR:NO REPLY 26136 TSM:FPAR 26138 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 28147 !TSM:FPAR:NO REPLY 28149 TSM:FPAR 28151 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 30162 !TSM:FPAR:FAIL 30164 TSM:FAIL:CNT=2 30167 TSM:FAIL:PDT 40171 TSM:FAIL:RE-INIT 40173 TSM:INIT 40179 TSM:INIT:TSP OK 40183 TSM:FPAR 40185 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 42196 !TSM:FPAR:NO REPLY 42199 TSM:FPAR 42201 TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 42209 TSF:MSG:READ,0-0-255,s=255,c=3,t=8,pt=1,l=1,sg=0:0 42215 TSF:MSG:FPAR OK,ID=0,D=1 44210 TSM:FPAR:OK 44212 TSM:ID 44212 TSM:ID:REQ 44216 TSF:MSG:SEND,255-255-0-0,s=255,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK:RPi:
pi@rpi:~/projects/RF24/rf24libs/RF24/examples_linux $ sudo mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.1.1 mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.1.1 mysgw: TSF:LRT:OK mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: Listening for connections on 0.0.0.0:5003 mysgw: MCO:BGN:STP mysgw: MCO:BGN:INIT OK,TSP=1 mysgw: New connection from 192.168.11.31 mysgw: Client 0 connected mysgw: Client 0: 0;0;3;0;2; mysgw: Client 0: 0;0;3;0;18;PING mysgw: Client 0: 0;0;3;0;2;Get Version mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:PNG:SEND,TO=0 mysgw: TSF:CKU:OK mysgw: TSF:MSG:GWL OK mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=OK:0 mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=OK:0 mysgw: TSF:MSG:READ,255-255-0,s=255,c=3,t=3,pt=0,l=0,sg=0: mysgw: Client 0: 255;255;3;0;4;1 mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=4,pt=0,l=1,sg=0,ft=0,st=OK:1 mysgw: Client 0: 0;0;3;0;18;PING mysgw: TSF:MSG:READ,255-255-0,s=255,c=3,t=3,pt=0,l=0,sg=0: mysgw: Client 0: 255;255;3;0;4;1 mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=4,pt=0,l=1,sg=0,ft=0,st=OK:1 mysgw: Client 0: 0;0;3;0;18;PING mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:PNG:SEND,TO=0 mysgw: TSF:CKU:OK mysgw: TSF:MSG:GWL OK mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=OK:0 mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=OK:0 mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=OK:0 mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OK mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=OK:0 mysgw: Client 0: 0;0;3;0;18;PING mysgw: Client 0: 0;0;3;0;18;PING mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:PNG:SEND,TO=0 mysgw: TSF:CKU:OK mysgw: TSF:MSG:GWL OK mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=OK:0 mysgw: TSF:MSG:READ,255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0: mysgw: TSF:MSG:BC mysgw: TSF:MSG:FPAR REQ,ID=255 mysgw: TSF:CKU:OK,FCTRL mysgw: TSF:MSG:GWL OKAm I missing a step? I am running "sudo mysgw -d" on the RPI, followed by "sudo service domocoticz.sh restart", then pushing the MotionSensor example to my Pro Mini.
Thanks again for everyone's help!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login