This is a rough integration of the code with MySensors.
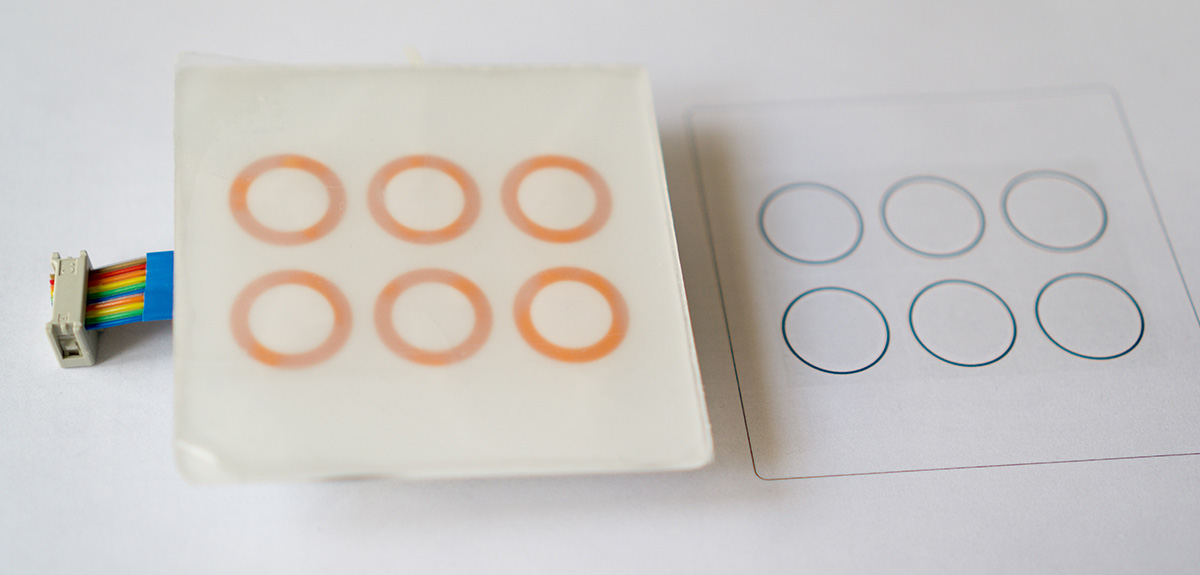
It sends messages back and forth, so if a button is touched it turns on the corresponding device on the controller and if the switch is turned on the controller, the touch leds are updated accordingly
#include "mpr121.h"
#include <Wire.h>
#include "LedControlMS.h"
#include <MySensor.h>
#include <SPI.h>
#include <MyBuffer.h>
#define CHILD_ID1 1 // first child
#define CHILD_NUM 6 // number of switches
//define working pins
#define BUZZER 7 // buzzer pin
#define DIN 6 // pin 6 is connected to the DataIn
#define CLK 4 // pin 4 is connected to the CLK
#define LOD 8 // pin 8 is connected to LOAD
#define IRQ 3 // irq pin for touch control
#define BAKLIT 5 // pin PWM for backlight leds
// ********* MyBuffer ***********************************************************
MyBuffer buffer; // define a new buffer
long previousMillis = 0; // will store last time buffer was processed
long interval = 1000; // interval at which to check buffer
// ******************************************************************************
MySensor gw;
//define a new led control
LedControl lc=LedControl(DIN,CLK,LOD,1);
//int irqpin = 3; // Digital pin IRQ
boolean touchStates[12]; //to keep track of the previous touch states
boolean touchMemory[12]; //to keep track of the touch switch states
// correspondence between touch and led pins
int mapping[2][6]={{0,1,2,3,4,5} // touch pins
,{1,0,2,5,4,3}}; // led pins
int sound = 500;
int touchDelay=500;
void setup(){
// init LED backlight
pinMode(BAKLIT, OUTPUT);
analogWrite(BAKLIT, 5);
pinMode(IRQ, INPUT);
digitalWrite(IRQ, HIGH); //enable pullup resistor
Wire.begin();
pinMode(BUZZER, OUTPUT);
for (int i=0; i < 12; i++){
touchMemory[i]=false;
}
mpr121_setup();
//initialize MAX72XX
lc.shutdown(0,false);
lc.setIntensity(0,15);
lc.clearDisplay(0);
gw.begin(incomingMessage, AUTO); //do not make relay node
gw.sendSketchInfo("WallTouch", "1.0");
for (int i=0; i<CHILD_NUM;i++) {
gw.present(CHILD_ID1+i, S_LIGHT);
// Set touch button leds to last known state (using eeprom storage)
touchMemory[i] = gw.loadState(i)?true:false;
setLed(mapping[1][i],touchMemory[i]);
}
}
void loop(){
gw.process();
//watch for touch events
readTouchInputs();
//check for buffer items once in a while
checkTime();
}
void checkTime(){
unsigned long currentMillis = millis();
if(currentMillis - previousMillis > interval) {
previousMillis = currentMillis;
processBuffer();
}
}
void incomingMessage(const MyMessage &message) {
buffer.push(message.sensor,message.type,message.getString());
}
//gets message from buffer if exists
void processBuffer(){
if(!buffer.isEmpty()){
String msg=buffer.pop();
int mIndex = msg.indexOf(';');
int secondmIndex = msg.indexOf(';', mIndex+1);
String firstValue = msg.substring(0, mIndex);
String secondValue = msg.substring(mIndex+1, secondmIndex);
String thirdValue = msg.substring(secondmIndex+1);
int sensor = firstValue.toInt();
int type = secondValue.toInt();
String data = thirdValue;
Serial.println(" >> Process MSG: s:"+ firstValue +", t:"+secondValue+", d:"+thirdValue);
processMsg(sensor, type, data);
}
}
//process message from queue
void processMsg(int sensor, int type, String data){
boolean msg;
switch(type){
case V_LIGHT:
//comando para 1 rele
msg=data.toInt()?1:0;
// Store state in eeprom
gw.saveState(sensor, msg);
// Write some debug info
Serial.print("--> Incoming change for child:");
Serial.print(sensor-1);
Serial.print(", New status: ");
Serial.println(msg);
setTouchButton(sensor-1);
break;
}
}
void setTouchButton(int pressed){
MyMessage msg(CHILD_ID1+pressed,V_LIGHT);
Serial.print("pin ");
Serial.print(pressed);
Serial.print(" was just touched");
Serial.print(", turning: ");
touchMemory[pressed]=touchMemory[pressed]?false:true;
gw.saveState(pressed, touchMemory[pressed]);
Serial.println(touchMemory[pressed]?"ON":"OFF");
setLed(mapping[1][pressed],touchMemory[pressed]?true:false);
gw.send(msg.set(touchMemory[pressed] ? 1 : 0));
touchSound();
}
void setLed(int led, boolean lit){
lc.setLed(0,0,led,lit);
}
void readTouchInputs(){
if(!checkInterrupt()){
//read the touch state from the MPR121
Wire.requestFrom(0x5A,2);
byte LSB = Wire.read();
byte MSB = Wire.read();
uint16_t touched = ((MSB << 8) | LSB); //16bits that make up the touch states
for (int i=0; i < 12; i++){ // Check what electrodes were pressed
if(touched & (1<<i)){
if(touchStates[i] == 0){
//pin i was just touched
setTouchButton(i);
delay(touchDelay);
}else if(touchStates[i] == 1){
//pin i is still being touched
}
touchStates[i] = 1;
}else{
/* if(touchStates[i] == 1){
Serial.print("pin ");
Serial.print(i);
Serial.println(" is no longer being touched");
//pin i is no longer being touched
}*/
touchStates[i] = 0;
}
}
}
}
void touchSound(){
tone(BUZZER, sound, 3);
}
void mpr121_setup(void){
set_register(0x5A, ELE_CFG, 0x00);
// Section A - Controls filtering when data is > baseline.
set_register(0x5A, MHD_R, 0x01);
set_register(0x5A, NHD_R, 0x01);
set_register(0x5A, NCL_R, 0x00);
set_register(0x5A, FDL_R, 0x00);
// Section B - Controls filtering when data is < baseline.
set_register(0x5A, MHD_F, 0x01);
set_register(0x5A, NHD_F, 0x01);
set_register(0x5A, NCL_F, 0xFF);
set_register(0x5A, FDL_F, 0x02);
// Section C - Sets touch and release thresholds for each electrode
set_register(0x5A, ELE0_T, TOU_THRESH);
set_register(0x5A, ELE0_R, REL_THRESH);
set_register(0x5A, ELE1_T, TOU_THRESH);
set_register(0x5A, ELE1_R, REL_THRESH);
set_register(0x5A, ELE2_T, TOU_THRESH);
set_register(0x5A, ELE2_R, REL_THRESH);
set_register(0x5A, ELE3_T, TOU_THRESH);
set_register(0x5A, ELE3_R, REL_THRESH);
set_register(0x5A, ELE4_T, TOU_THRESH);
set_register(0x5A, ELE4_R, REL_THRESH);
set_register(0x5A, ELE5_T, TOU_THRESH);
set_register(0x5A, ELE5_R, REL_THRESH);
/*
set_register(0x5A, ELE6_T, TOU_THRESH);
set_register(0x5A, ELE6_R, REL_THRESH);
set_register(0x5A, ELE7_T, TOU_THRESH);
set_register(0x5A, ELE7_R, REL_THRESH);
set_register(0x5A, ELE8_T, TOU_THRESH);
set_register(0x5A, ELE8_R, REL_THRESH);
set_register(0x5A, ELE9_T, TOU_THRESH);
set_register(0x5A, ELE9_R, REL_THRESH);
set_register(0x5A, ELE10_T, TOU_THRESH);
set_register(0x5A, ELE10_R, REL_THRESH);
set_register(0x5A, ELE11_T, TOU_THRESH);
set_register(0x5A, ELE11_R, REL_THRESH);
*/
// Section D
// Set the Filter Configuration
// Set ESI2
set_register(0x5A, FIL_CFG, 0x12); //12 mas menos
//set_register(0x5A, FIL_CFG, 0x24); //segundo filtro
// set_register(0x5A, 0x5C, 0x28); // primer filtro (mio)
//ajuste de la corrente de carga de cada pin
/* set_register(0x5A, 0x5F, CDC_sensor[0]); //el 0
set_register(0x5A, 0x60, CDC_sensor[1]); //el 1
set_register(0x5A, 0x61, CDC_sensor[2]); //el 2
set_register(0x5A, 0x62, CDC_sensor[3]); //el 3
set_register(0x5A, 0x63, CDC_sensor[4]); //el 4
set_register(0x5A, 0x64, CDC_sensor[5]); //el 5
*/
// Section E
// Electrode Configuration
// Set ELE_CFG to 0x00 to return to standby mode
set_register(0x5A, ELE_CFG, 0x0C); // Enables all 12 Electrodes
// Section F
// Enable Auto Config and auto Reconfig
/*set_register(0x5A, ATO_CFG0, 0x0B);
set_register(0x5A, ATO_CFGU, 0xC9); // USL = (Vdd-0.7)/vdd*256 = 0xC9 @3.3V set_register(0x5A, ATO_CFGL, 0x82); // LSL = 0.65*USL = 0x82 @3.3V
set_register(0x5A, ATO_CFGT, 0xB5);*/ // Target = 0.9*USL = 0xB5 @3.3V
set_register(0x5A, ELE_CFG, 0x0C);
}
boolean checkInterrupt(void){
return digitalRead(IRQ);
}
void set_register(int address, unsigned char r, unsigned char v){
Wire.beginTransmission(address);
Wire.write(r);
Wire.write(v);
Wire.endTransmission();
}