HM-TRP Gateway
-
Hi guys,
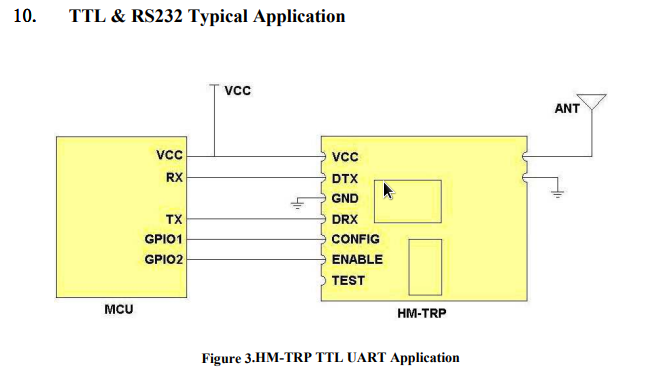
i'm just getting started with mysensors, and i'm really impressed with the whole concept, much appreciation to the whole team involved.I have a couple of HM-TRP transceiver modules and Arduino nanos. I'd like to build a gateway and sensor nodes with the HM-TRP transceiver. I've looked intensively at all the examples here and i havent found any close to what i want to build, because most of them deal with radios connected via SPI. My radio will be connected via UART operating at 869MHz
Below is a schematic on how to connect the trasnsceiver to the µC
If someone could guide me through on how to integrate this transceiver to mysensors i'd really appreciate
Thanks and best regards,
Chanky -
Hi guys,
i'm just getting started with mysensors, and i'm really impressed with the whole concept, much appreciation to the whole team involved.I have a couple of HM-TRP transceiver modules and Arduino nanos. I'd like to build a gateway and sensor nodes with the HM-TRP transceiver. I've looked intensively at all the examples here and i havent found any close to what i want to build, because most of them deal with radios connected via SPI. My radio will be connected via UART operating at 869MHz
Below is a schematic on how to connect the trasnsceiver to the µC
If someone could guide me through on how to integrate this transceiver to mysensors i'd really appreciate
Thanks and best regards,
Chanky -
Hi guys,
i'm just getting started with mysensors, and i'm really impressed with the whole concept, much appreciation to the whole team involved.I have a couple of HM-TRP transceiver modules and Arduino nanos. I'd like to build a gateway and sensor nodes with the HM-TRP transceiver. I've looked intensively at all the examples here and i havent found any close to what i want to build, because most of them deal with radios connected via SPI. My radio will be connected via UART operating at 869MHz
Below is a schematic on how to connect the trasnsceiver to the µC
If someone could guide me through on how to integrate this transceiver to mysensors i'd really appreciate
Thanks and best regards,
Chanky -
Hi guys im currently looking at the MyTransportRS485 module so that i can create a new module for HM-TRP and im just not getting how _serialProcess() should work, may be there is something im over looking so i need your help.
In the case 0 below , the memcpy copies 5 bytes from the address of_header[1] to the address of _header[0] ,
_header is only declared globally but never written (apart from the fifth element which is fed with the value of inch after memcpy). So when the "if" statement is evaluated for the first time the content of the array could be anything. Shouldn't _header[] be initialised and filled before _serialProcess() is called first?
// Receiving header information char _header[6];bool _serialProcess() { unsigned char i; if (!_dev.available()) { return false; } while(_dev.available()) { char inch; inch = _dev.read(); switch(_recPhase) { // Case 0 looks for the header. Bytes arrive in the serial interface and get // shifted through a header buffer. When the start and end characters in // the buffer match the SOH/STX pair, and the destination station ID matches // our ID, save the header information and progress to the next state. case 0: memcpy(&_header[0],&_header[1],5); _header[5] = inch; if ((_header[0] == SOH) && (_header[5] == STX) && (_header[1] != _header[2])) { _recCalcCS = 0; _recStation = _header[1]; _recSender = _header[2]; _recCommand = _header[3]; _recLen = _header[4]; for (i=1; i<=4; i++) { _recCalcCS += _header[i]; } _recPhase = 1; _recPos = 0; //Avoid _data[] overflow if (_recLen >= MY_RS485_MAX_MESSAGE_LENGTH) { _serialReset(); break; } //Check if we should process this message //We reject the message if we are the sender //We reject if we are not the receiver and message is not a broadcast if ((_recSender == _nodeId) || (_recStation != _nodeId && _recStation != BROADCAST_ADDRESS)) { _serialReset(); break; } if (_recLen == 0) { _recPhase = 2; } } break; // Case 1 receives the data portion of the packet. Read in "_recLen" number // of bytes and store them in the _data array. case 1: _data[_recPos++] = inch; _recCalcCS += inch; if (_recPos == _recLen) { _recPhase = 2; } break; // After the data comes a single ETX character. Do we have it? If not, // reset the state machine to default and start looking for a new header. case 2: // Packet properly terminated? if (inch == ETX) { _recPhase = 3; } else { _serialReset(); } break; // Next comes the checksum. We have already calculated it from the incoming // data, so just store the incoming checksum byte for later. case 3: _recCS = inch; _recPhase = 4; break; // The final state - check the last character is EOT and that the checksum matches. // If that test passes, then look for a valid command callback to execute. // Execute it if found. case 4: if (inch == EOT) { if (_recCS == _recCalcCS) { // First, check for system level commands. It is possible // to register your own callback as well for system level // commands which will be called after the system default // hook. switch (_recCommand) { case ICSC_SYS_PACK: _packet_from = _recSender; _packet_len = _recLen; _packet_received = true; break; } } } //Clear the data _serialReset(); //Return true, we have processed one command return true; break; } } return true; }Thank you for you help !
Best regards
Chanky -
Hi guys im currently looking at the MyTransportRS485 module so that i can create a new module for HM-TRP and im just not getting how _serialProcess() should work, may be there is something im over looking so i need your help.
In the case 0 below , the memcpy copies 5 bytes from the address of_header[1] to the address of _header[0] ,
_header is only declared globally but never written (apart from the fifth element which is fed with the value of inch after memcpy). So when the "if" statement is evaluated for the first time the content of the array could be anything. Shouldn't _header[] be initialised and filled before _serialProcess() is called first?
// Receiving header information char _header[6];bool _serialProcess() { unsigned char i; if (!_dev.available()) { return false; } while(_dev.available()) { char inch; inch = _dev.read(); switch(_recPhase) { // Case 0 looks for the header. Bytes arrive in the serial interface and get // shifted through a header buffer. When the start and end characters in // the buffer match the SOH/STX pair, and the destination station ID matches // our ID, save the header information and progress to the next state. case 0: memcpy(&_header[0],&_header[1],5); _header[5] = inch; if ((_header[0] == SOH) && (_header[5] == STX) && (_header[1] != _header[2])) { _recCalcCS = 0; _recStation = _header[1]; _recSender = _header[2]; _recCommand = _header[3]; _recLen = _header[4]; for (i=1; i<=4; i++) { _recCalcCS += _header[i]; } _recPhase = 1; _recPos = 0; //Avoid _data[] overflow if (_recLen >= MY_RS485_MAX_MESSAGE_LENGTH) { _serialReset(); break; } //Check if we should process this message //We reject the message if we are the sender //We reject if we are not the receiver and message is not a broadcast if ((_recSender == _nodeId) || (_recStation != _nodeId && _recStation != BROADCAST_ADDRESS)) { _serialReset(); break; } if (_recLen == 0) { _recPhase = 2; } } break; // Case 1 receives the data portion of the packet. Read in "_recLen" number // of bytes and store them in the _data array. case 1: _data[_recPos++] = inch; _recCalcCS += inch; if (_recPos == _recLen) { _recPhase = 2; } break; // After the data comes a single ETX character. Do we have it? If not, // reset the state machine to default and start looking for a new header. case 2: // Packet properly terminated? if (inch == ETX) { _recPhase = 3; } else { _serialReset(); } break; // Next comes the checksum. We have already calculated it from the incoming // data, so just store the incoming checksum byte for later. case 3: _recCS = inch; _recPhase = 4; break; // The final state - check the last character is EOT and that the checksum matches. // If that test passes, then look for a valid command callback to execute. // Execute it if found. case 4: if (inch == EOT) { if (_recCS == _recCalcCS) { // First, check for system level commands. It is possible // to register your own callback as well for system level // commands which will be called after the system default // hook. switch (_recCommand) { case ICSC_SYS_PACK: _packet_from = _recSender; _packet_len = _recLen; _packet_received = true; break; } } } //Clear the data _serialReset(); //Return true, we have processed one command return true; break; } } return true; }Thank you for you help !
Best regards
Chanky -
It is 6 bytes sliding window which is filled from end and compared for correct byte order.
Here is _header loaded with data:_header[5] = inchMaybe this helps:
-
Hi guys,
Ive got my changes ready for HM-TRP and id like to test them with arduino, how can i create libraries for arduino? I didnt find any build documentation regarding modified core modules, so if this is documented somewhere im sorry i wasnt able to find this please share the link.
Thanks and best regards
Chanky -
Hi guys,
Ive got my changes ready for HM-TRP and id like to test them with arduino, how can i create libraries for arduino? I didnt find any build documentation regarding modified core modules, so if this is documented somewhere im sorry i wasnt able to find this please share the link.
Thanks and best regards
Chanky
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login