Pls Help: Sensor value shows in Domoticz Hardware TAB, but wont show on Switches


-
Please Help needed I have a Node with Sonar sensor and an digitalRead(A0) value from Node to Gateway. The value shows on Domoticz Hardware TAB, but wont show on Switches. I have stayed up all night looking for solutions without much luck. I sketch is as follows.
// Example sketch showing how to control physical relays. // This example will remember relay state even after power failure. // Enable debug prints #define MY_DEBUG ON // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_RF24_PA_LEVEL RF24_PA_HIGH // Options MAX to reach the furthest #define MY_NODE_ID 4 // Set this to fix your Radio ID or use AUTO or 1 #define MY_REGISTRATION_FEATURE // Force registration #define MY_REGISTRATION_RETRIES 5 #include <Wire.h> #include <TimeLib.h> #include <SPI.h> #include <MySensors.h> #include <NewPing.h> // For Debug #ifdef DEBUG_ON #define DEBUG_PRINT(x) Serial.print(x) #define DEBUG_PRINTLN(x) Serial.println(x) #else #define DEBUG_PRINT(x) #define DEBUG_PRINTLN(x) #define SERIAL_START(x) #endif #define RELAY_PIN 2 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define NUMBER_OF_RELAYS 5 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define SKETCH_NAME "Generator Node" #define SKETCH_VERSION "1.3.1" #define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS); MyMessage msgTank1(1, V_VOLUME); MyMessage msgTank2(8, V_VOLUME); boolean sensorState, lastSensorState; //constant for the sonar HC-SR04 sensor #define TRIGGER_PIN 8 #define ECHO_PIN 7 #define MAX_DISTANCE 300 //distance max measured //constant to calculate the volume of the tank #define high_water_level 30 //tank depth from the lowest point to the max water level #define distance_sensor 10 //was 30 = distance in cm between the max water level and the sensor #define tank_volume 1000 //tank volume (10000 default) when it is fitted to the max water level unsigned long SLEEP_TIME = 5000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. int lastDist; bool metric = true; void setup() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins to output mode pinMode(pin, OUTPUT); // Set relay to last known state (using eeprom storage) digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Initialised Relay: ")); DEBUG_PRINT(F(sensor)); DEBUG_PRINT(F(" at pin ")); DEBUG_PRINT(F(pin)); DEBUG_PRINT(F(" (")); DEBUG_PRINT(F(loadState(sensor))); DEBUG_PRINTLN(F(")")); } pinMode(A0, INPUT); // Then set etra sensor pins to input mode pinMode(A1, INPUT); // Float Sensor for Gen fuel Tank pinMode(A2, INPUT); // Spare Sensor Readout DEBUG_PRINTLN(F("Initialize additional Sensor: ")); } void presentation() { sendSketchInfo(SKETCH_NAME, SKETCH_VERSION); // Manually present the additional 3 sensors present(0, S_BINARY); pinMode(A0, INPUT); // Then set relay pins in output mode boolean savedState = loadState(A0); // Set relay to last known state (using eeprom storage) digitalWrite(A0, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A0)); send(msg.set(savedState? 0 : 1)); // Fetch relay status for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); } // DEBUG_PRINTLN(F("Sensor Presentation Complete")); // Manually present the additional 2 sensors present(6, S_WATER); pinMode(A1, INPUT); // Then set relay pins in output mode savedState = loadState(A1); // Set relay to last known state (using eeprom storage) digitalWrite(A1, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A1)); send(msg.set(savedState? 0 : 1)); } void loop() { // Alway process incoming messages whenever possible // Sleep until interrupt comes in on motion sensor. Send update every two minute. // sleep(digitalPinToInterrupt(DIGITAL_INPUT_SENSOR), CHANGE, SLEEP_TIME); Serial.print("Fuel Level: "); Serial.print(tank_level("liters")); Serial.print("L"); Serial.print("("); Serial.print(tank_level("percent")); Serial.println("%)"); send(msgTank1.set(tank_level("liters"))); if(digitalRead(A0) == LOW){ DEBUG_PRINTLN(F("There is no Light")); Serial.println(sensorState? "Light On" : "Light Off"); send(msgNEPA.set(sensorState?"0":"0")); // Update gateway on change of state } else { DEBUG_PRINTLN(F("Up NEPA!")); Serial.println(sensorState? "Light Off" : "Light On"); send(msgNEPA.set(sensorState?"1":"1")); // Update gateway on change of state } wait(2000); // use for debuging } void receive(const MyMessage &message){ // Change relay state if message is received if (digitalRead(A0) == HIGH){ // Sensor says tank is full do something // DEBUG_PRINTLN(F("Float Sensor High, 'Tank is Full'")); // digitalWrite(3, LOW); // Switch off tank pump saveState(message.sensor, message.getBool()); bool send(MyMessage &msgNEPA, bool ack); } if (message.type == V_STATUS){ // digitalWrite(message.sensor, !digitalRead(message.sensor)); if (message.getBool() == 0) { digitalWrite(message.sensor, LOW); // Store state in eeprom saveState(message.sensor, message.getBool()); } else //getBool() == 1 digitalWrite(message.sensor, HIGH); // Store state in eeprom saveState(message.sensor, message.getBool()); // digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Write some debug info Serial.print("Incoming change for sensor ID: "); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } int tank_level(String unit) //function to measure and convert the tank volume { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; // int level_liters,level_percent, echo_us, echo_cm, water_level_cm; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * (tank_volume / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }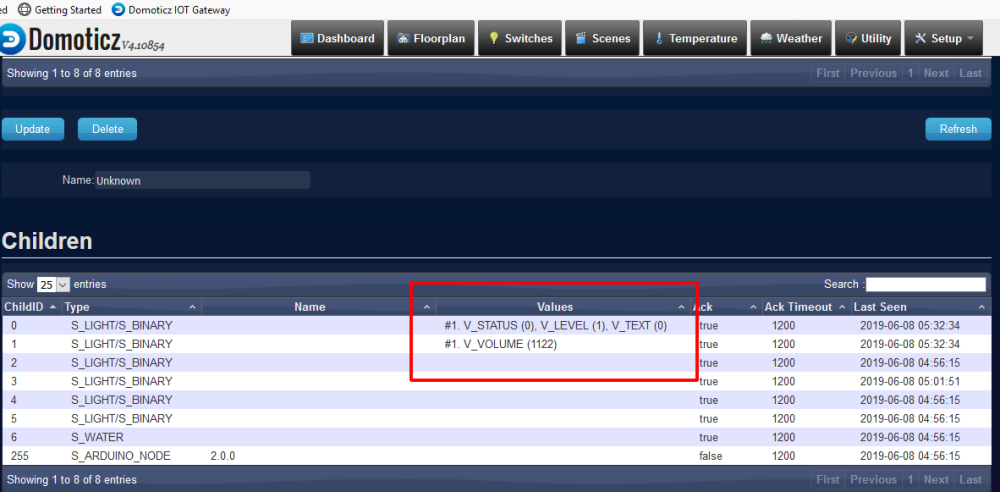
-
Please Help needed I have a Node with Sonar sensor and an digitalRead(A0) value from Node to Gateway. The value shows on Domoticz Hardware TAB, but wont show on Switches. I have stayed up all night looking for solutions without much luck. I sketch is as follows.
// Example sketch showing how to control physical relays. // This example will remember relay state even after power failure. // Enable debug prints #define MY_DEBUG ON // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_RF24_PA_LEVEL RF24_PA_HIGH // Options MAX to reach the furthest #define MY_NODE_ID 4 // Set this to fix your Radio ID or use AUTO or 1 #define MY_REGISTRATION_FEATURE // Force registration #define MY_REGISTRATION_RETRIES 5 #include <Wire.h> #include <TimeLib.h> #include <SPI.h> #include <MySensors.h> #include <NewPing.h> // For Debug #ifdef DEBUG_ON #define DEBUG_PRINT(x) Serial.print(x) #define DEBUG_PRINTLN(x) Serial.println(x) #else #define DEBUG_PRINT(x) #define DEBUG_PRINTLN(x) #define SERIAL_START(x) #endif #define RELAY_PIN 2 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define NUMBER_OF_RELAYS 5 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define SKETCH_NAME "Generator Node" #define SKETCH_VERSION "1.3.1" #define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS); MyMessage msgTank1(1, V_VOLUME); MyMessage msgTank2(8, V_VOLUME); boolean sensorState, lastSensorState; //constant for the sonar HC-SR04 sensor #define TRIGGER_PIN 8 #define ECHO_PIN 7 #define MAX_DISTANCE 300 //distance max measured //constant to calculate the volume of the tank #define high_water_level 30 //tank depth from the lowest point to the max water level #define distance_sensor 10 //was 30 = distance in cm between the max water level and the sensor #define tank_volume 1000 //tank volume (10000 default) when it is fitted to the max water level unsigned long SLEEP_TIME = 5000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. int lastDist; bool metric = true; void setup() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins to output mode pinMode(pin, OUTPUT); // Set relay to last known state (using eeprom storage) digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Initialised Relay: ")); DEBUG_PRINT(F(sensor)); DEBUG_PRINT(F(" at pin ")); DEBUG_PRINT(F(pin)); DEBUG_PRINT(F(" (")); DEBUG_PRINT(F(loadState(sensor))); DEBUG_PRINTLN(F(")")); } pinMode(A0, INPUT); // Then set etra sensor pins to input mode pinMode(A1, INPUT); // Float Sensor for Gen fuel Tank pinMode(A2, INPUT); // Spare Sensor Readout DEBUG_PRINTLN(F("Initialize additional Sensor: ")); } void presentation() { sendSketchInfo(SKETCH_NAME, SKETCH_VERSION); // Manually present the additional 3 sensors present(0, S_BINARY); pinMode(A0, INPUT); // Then set relay pins in output mode boolean savedState = loadState(A0); // Set relay to last known state (using eeprom storage) digitalWrite(A0, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A0)); send(msg.set(savedState? 0 : 1)); // Fetch relay status for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); } // DEBUG_PRINTLN(F("Sensor Presentation Complete")); // Manually present the additional 2 sensors present(6, S_WATER); pinMode(A1, INPUT); // Then set relay pins in output mode savedState = loadState(A1); // Set relay to last known state (using eeprom storage) digitalWrite(A1, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A1)); send(msg.set(savedState? 0 : 1)); } void loop() { // Alway process incoming messages whenever possible // Sleep until interrupt comes in on motion sensor. Send update every two minute. // sleep(digitalPinToInterrupt(DIGITAL_INPUT_SENSOR), CHANGE, SLEEP_TIME); Serial.print("Fuel Level: "); Serial.print(tank_level("liters")); Serial.print("L"); Serial.print("("); Serial.print(tank_level("percent")); Serial.println("%)"); send(msgTank1.set(tank_level("liters"))); if(digitalRead(A0) == LOW){ DEBUG_PRINTLN(F("There is no Light")); Serial.println(sensorState? "Light On" : "Light Off"); send(msgNEPA.set(sensorState?"0":"0")); // Update gateway on change of state } else { DEBUG_PRINTLN(F("Up NEPA!")); Serial.println(sensorState? "Light Off" : "Light On"); send(msgNEPA.set(sensorState?"1":"1")); // Update gateway on change of state } wait(2000); // use for debuging } void receive(const MyMessage &message){ // Change relay state if message is received if (digitalRead(A0) == HIGH){ // Sensor says tank is full do something // DEBUG_PRINTLN(F("Float Sensor High, 'Tank is Full'")); // digitalWrite(3, LOW); // Switch off tank pump saveState(message.sensor, message.getBool()); bool send(MyMessage &msgNEPA, bool ack); } if (message.type == V_STATUS){ // digitalWrite(message.sensor, !digitalRead(message.sensor)); if (message.getBool() == 0) { digitalWrite(message.sensor, LOW); // Store state in eeprom saveState(message.sensor, message.getBool()); } else //getBool() == 1 digitalWrite(message.sensor, HIGH); // Store state in eeprom saveState(message.sensor, message.getBool()); // digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Write some debug info Serial.print("Incoming change for sensor ID: "); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } int tank_level(String unit) //function to measure and convert the tank volume { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; // int level_liters,level_percent, echo_us, echo_cm, water_level_cm; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * (tank_volume / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }
@eme look at the debug log from the node and the gateway.
My guess is that they will show messages with st=fail, showing that the message didn't get through.
If you haven't already, see https://forum.mysensors.org/topic/666/debug-faq-and-how-ask-for-help/ for a list of the most common problems and a troubleshooting flowchart.
-
Please Help needed I have a Node with Sonar sensor and an digitalRead(A0) value from Node to Gateway. The value shows on Domoticz Hardware TAB, but wont show on Switches. I have stayed up all night looking for solutions without much luck. I sketch is as follows.
// Example sketch showing how to control physical relays. // This example will remember relay state even after power failure. // Enable debug prints #define MY_DEBUG ON // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_RF24_PA_LEVEL RF24_PA_HIGH // Options MAX to reach the furthest #define MY_NODE_ID 4 // Set this to fix your Radio ID or use AUTO or 1 #define MY_REGISTRATION_FEATURE // Force registration #define MY_REGISTRATION_RETRIES 5 #include <Wire.h> #include <TimeLib.h> #include <SPI.h> #include <MySensors.h> #include <NewPing.h> // For Debug #ifdef DEBUG_ON #define DEBUG_PRINT(x) Serial.print(x) #define DEBUG_PRINTLN(x) Serial.println(x) #else #define DEBUG_PRINT(x) #define DEBUG_PRINTLN(x) #define SERIAL_START(x) #endif #define RELAY_PIN 2 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define NUMBER_OF_RELAYS 5 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay #define SKETCH_NAME "Generator Node" #define SKETCH_VERSION "1.3.1" #define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS); MyMessage msgTank1(1, V_VOLUME); MyMessage msgTank2(8, V_VOLUME); boolean sensorState, lastSensorState; //constant for the sonar HC-SR04 sensor #define TRIGGER_PIN 8 #define ECHO_PIN 7 #define MAX_DISTANCE 300 //distance max measured //constant to calculate the volume of the tank #define high_water_level 30 //tank depth from the lowest point to the max water level #define distance_sensor 10 //was 30 = distance in cm between the max water level and the sensor #define tank_volume 1000 //tank volume (10000 default) when it is fitted to the max water level unsigned long SLEEP_TIME = 5000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. int lastDist; bool metric = true; void setup() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins to output mode pinMode(pin, OUTPUT); // Set relay to last known state (using eeprom storage) digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Initialised Relay: ")); DEBUG_PRINT(F(sensor)); DEBUG_PRINT(F(" at pin ")); DEBUG_PRINT(F(pin)); DEBUG_PRINT(F(" (")); DEBUG_PRINT(F(loadState(sensor))); DEBUG_PRINTLN(F(")")); } pinMode(A0, INPUT); // Then set etra sensor pins to input mode pinMode(A1, INPUT); // Float Sensor for Gen fuel Tank pinMode(A2, INPUT); // Spare Sensor Readout DEBUG_PRINTLN(F("Initialize additional Sensor: ")); } void presentation() { sendSketchInfo(SKETCH_NAME, SKETCH_VERSION); // Manually present the additional 3 sensors present(0, S_BINARY); pinMode(A0, INPUT); // Then set relay pins in output mode boolean savedState = loadState(A0); // Set relay to last known state (using eeprom storage) digitalWrite(A0, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A0)); send(msg.set(savedState? 0 : 1)); // Fetch relay status for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); } // DEBUG_PRINTLN(F("Sensor Presentation Complete")); // Manually present the additional 2 sensors present(6, S_WATER); pinMode(A1, INPUT); // Then set relay pins in output mode savedState = loadState(A1); // Set relay to last known state (using eeprom storage) digitalWrite(A1, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay at : ")); DEBUG_PRINTLN(F(A1)); send(msg.set(savedState? 0 : 1)); } void loop() { // Alway process incoming messages whenever possible // Sleep until interrupt comes in on motion sensor. Send update every two minute. // sleep(digitalPinToInterrupt(DIGITAL_INPUT_SENSOR), CHANGE, SLEEP_TIME); Serial.print("Fuel Level: "); Serial.print(tank_level("liters")); Serial.print("L"); Serial.print("("); Serial.print(tank_level("percent")); Serial.println("%)"); send(msgTank1.set(tank_level("liters"))); if(digitalRead(A0) == LOW){ DEBUG_PRINTLN(F("There is no Light")); Serial.println(sensorState? "Light On" : "Light Off"); send(msgNEPA.set(sensorState?"0":"0")); // Update gateway on change of state } else { DEBUG_PRINTLN(F("Up NEPA!")); Serial.println(sensorState? "Light Off" : "Light On"); send(msgNEPA.set(sensorState?"1":"1")); // Update gateway on change of state } wait(2000); // use for debuging } void receive(const MyMessage &message){ // Change relay state if message is received if (digitalRead(A0) == HIGH){ // Sensor says tank is full do something // DEBUG_PRINTLN(F("Float Sensor High, 'Tank is Full'")); // digitalWrite(3, LOW); // Switch off tank pump saveState(message.sensor, message.getBool()); bool send(MyMessage &msgNEPA, bool ack); } if (message.type == V_STATUS){ // digitalWrite(message.sensor, !digitalRead(message.sensor)); if (message.getBool() == 0) { digitalWrite(message.sensor, LOW); // Store state in eeprom saveState(message.sensor, message.getBool()); } else //getBool() == 1 digitalWrite(message.sensor, HIGH); // Store state in eeprom saveState(message.sensor, message.getBool()); // digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Write some debug info Serial.print("Incoming change for sensor ID: "); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } int tank_level(String unit) //function to measure and convert the tank volume { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; // int level_liters,level_percent, echo_us, echo_cm, water_level_cm; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * (tank_volume / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }
@eme
I am not sure if Domoticz can know, what you want.
I am not MySensors expert, but there are some weird things in your code:#define CHILD_ID 0 MyMessage msgNEPA(0, V_STATUS); MyMessage msg(CHILD_ID, V_STATUS);msg and msgNEPA are identical, but you use it in different ways ....
MyMessage msgTank1(1, V_VOLUME);For CHILD ID 1 type of message V_VOLUME, but in loop:
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); pinMode(pin, OUTPUT); // Then set relay pins in output mode savedState = loadState(pin); // Set relay to last known state (using eeprom storage) digitalWrite(pin, savedState?RELAY_ON:RELAY_OFF); DEBUG_PRINT(F("Presented Relay st : ")); DEBUG_PRINTLN(F(pin)); send(msg.set(savedState? 0 : 1)); }You present CHILID ID 1 like S_BINARY
And then you set to this binary sensor volume value:
send(msgTank1.set(tank_level("liters")));And in the same presentation loop you send value only to child id 0, because msg.set send to ID 0
-
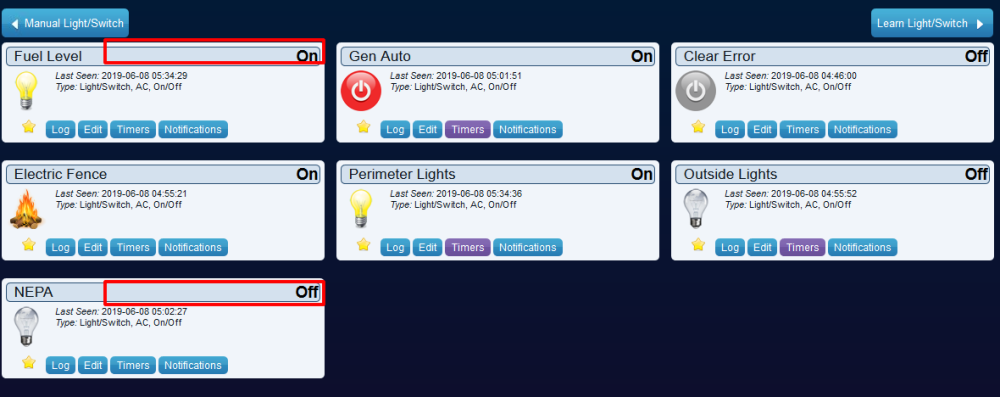
Did you activate the child(ren) through the "Setup" > "Devices" list? If yes, the arrow on the child(ren) should be oriented to the left side. If not, activate them, giving a name. You'll then see them on the associated tabs. Note that device type depends on the type sent during presentation (so don't expect being able to declare device as a switch if you don't use the right child type)
-
In addition to the remark on declaring sensor to Domoticz, the sketch itself seems to me a bit confusing.
Normally, you should do setup into setup function (stuff like pin mode, even eventually reading saved config and setting relay in correct state), presentation should contain only sendsketchinfo() & present(), loop should do the repetitive job.
You should avoid blocking the loop, especially if you want to receive messages (as you did).
You're using relay from pin 2 to 6 but sensor 1 to 5, but when receiving an order to set sensor x, you set pin x (instead of x+1). Result may not exactly be what you want/imagine.
You're turning pump off only when receiving a message (as the test is done here), instead in the loop.
You're using digitalWrite() on some analog pin (A1) ;-)
You're sending udpdates every 2 seconds, while sending either changes or data at larger interval may fit better.
In addition, you may also want to simplify:
send(msgNEPA.set(sensorState?"0":"0")) by send(msgNEPA.set(0)) (in addition, this will send numeric value instead of string, don't think that sending a string is what you want)and
send(msgNEPA.set(sensorState?"1":"1")) by send(msgNEPA.set(1))
May I suggest you explain what you have, and what you want to do, for us to guide you setting the sensors properly?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login