motion and relay
-
hello, I am looking for a code used 2 motion sensors and 1 relay
is that someone saw this forum? I have do a search but I found nothing
-
Hey maybe you can modify this sketch:
http://forum.mysensors.org/topic/902/relay-motion-multisensor
-
I have modified the code, I have no error message but:
the relay remains on position but n not appear in domoticz
in the logs they have the same name
dth11 the works#include <MySensor.h> #include <Wire.h> #include <DHT.h> #include <SimpleTimer.h> #define CHILD_ID_HUM 1 #define CHILD_ID_TEMP 2 #define CHILD_ID_MOTION 3 #define CHILD_ID_RELAY 4 #define RELAY 3 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define HUMIDITY_SENSOR_DIGITAL_PIN 4 #define MOTION_SENSOR_DIGITAL_PIN 5 #define MOTION_SENSOR_DIGITAL_PIN2 6 #define INTERRUPT MOTION_SENSOR_DIGITAL_PIN-2 // Usually the interrupt = pin -2 (on uno/nano anyway) #define RELAY_ON 0 // GPIO value to write to turn on attached relay #define RELAY_OFF 1 // GPIO value to write to turn off attached relay unsigned long SLEEP_TIME = 600000; // Sleep time between reads (in milliseconds) - 10mins MySensor gw; DHT dht; SimpleTimer timer; float lastTemp; float lastHum; boolean lastTripped; boolean lastTripped2; boolean metric = true; MyMessage msgHum(CHILD_ID_HUM, V_HUM); MyMessage msgTemp(CHILD_ID_TEMP, V_TEMP); MyMessage msg(CHILD_ID_MOTION, V_TRIPPED); void setup() { // Initialize library and add callback for incoming messages gw.begin(incomingMessage, AUTO, true); dht.setup(HUMIDITY_SENSOR_DIGITAL_PIN); // Send the Sketch Version Information to the Gateway gw.sendSketchInfo("HumTempRelayMotion", "1.0"); // REGISTER all sensors to gw (they will be created as child devices) gw.present(CHILD_ID_HUM, S_HUM); gw.present(CHILD_ID_TEMP, S_TEMP); gw.present(CHILD_ID_MOTION, S_MOTION); gw.present(CHILD_ID_RELAY, V_LIGHT); pinMode(RELAY, OUTPUT); digitalWrite(RELAY, gw.loadState(RELAY)?RELAY_OFF:RELAY_ON); //Serial.begin(9600); timer.setInterval(30000, getMeasure); metric = gw.getConfig().isMetric; } void loop() { // Alway process incoming messages whenever possible gw.process(); timer.run(); boolean tripped = digitalRead(MOTION_SENSOR_DIGITAL_PIN) == HIGH; if (tripped != lastTripped) { lastTripped = tripped; Serial.print("M: "); Serial.println(tripped); gw.send(msg.set(tripped?"1":"0")); // Send tripped value to gw } boolean tripped2 = digitalRead(MOTION_SENSOR_DIGITAL_PIN2) == HIGH; // if (tripped2 != lastTripped2) { lastTripped2 = tripped2; Serial.print("M2: "); Serial.println(tripped2); gw.send(msg.set(tripped2?"1":"0")); // Send tripped value to gw // } } void incomingMessage(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_LIGHT) { // Change relay state digitalWrite(message.sensor-CHILD_ID_RELAY+RELAY, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eeprom gw.saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } void getMeasure() { delay(dht.getMinimumSamplingPeriod()); float temperature = dht.getTemperature(); if (isnan(temperature)) { Serial.println("Failed reading temperature from DHT"); } else if (temperature != lastTemp) { lastTemp = temperature; if (!metric) { temperature = dht.toFahrenheit(temperature); } gw.send(msgTemp.set(temperature, 1)); Serial.print("T: "); Serial.println(temperature); } float humidity = dht.getHumidity(); if (isnan(humidity)) { Serial.println("Failed reading humidity from DHT"); } else if (humidity != lastHum) { lastHum = humidity; gw.send(msgHum.set(humidity, 1)); Serial.print("H: "); Serial.println(humidity); } } Insert Code Here
-
@dias You're presenting the relay incorrect.
this line in the setup
gw.present(CHILD_ID_RELAY, V_LIGHT);needs to be
gw.present(CHILD_ID_RELAY, S_LIGHT);And then you should see the sensor in Domoticz
-
the relay is present in domoticz but not the more it is driven on position when I connect the Arduino
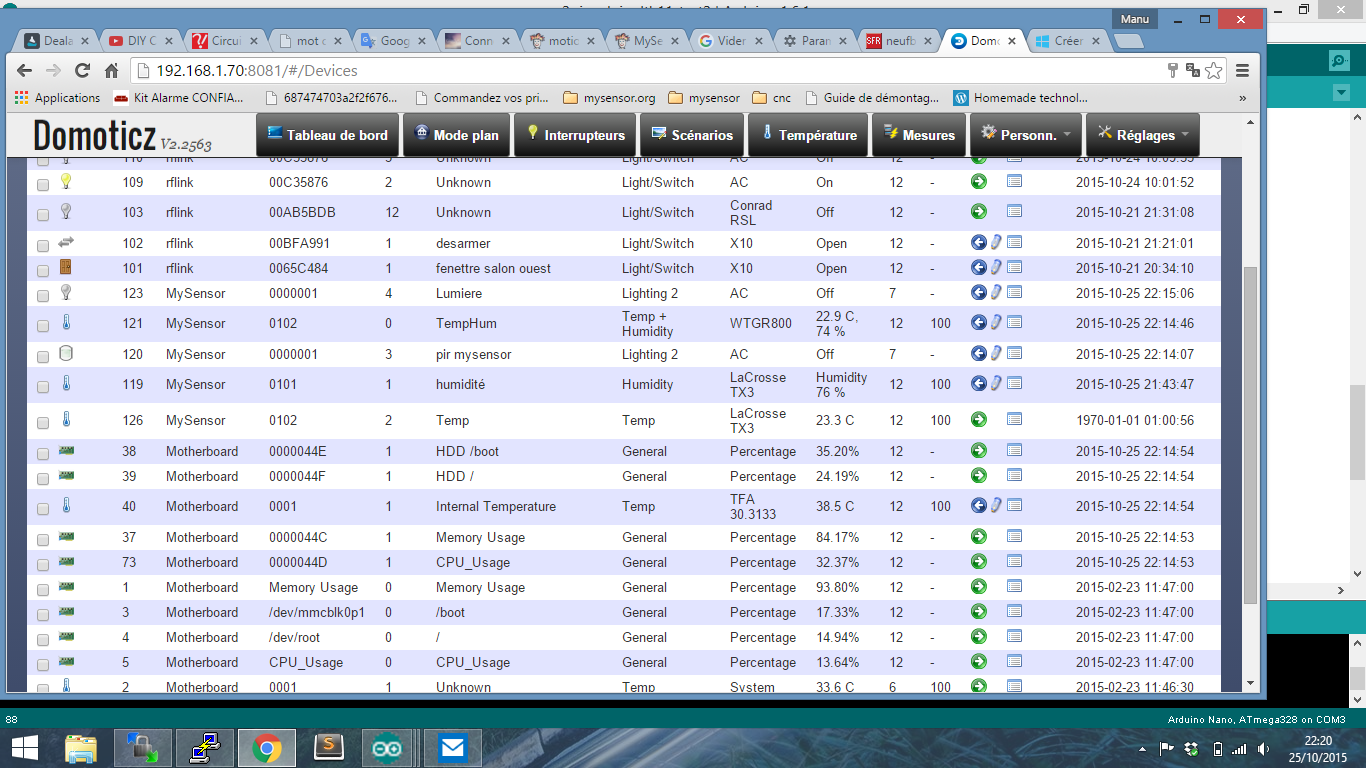
the motion sensor works well but they have the same name in domoticz so that I have one that appears
-
@dias I'm sorry but I really don't understand what you mean. Try to insert some Serial.println("") and check the serial monitor. That way you can debug your sensor.
-
I use google translation
the relay remains stuck on walk
2 pir sensor works well but in domoticz with the same name
-
I think this might cause your problem. It's in the incommingMessage method
if (message.type==V_LIGHT) { // Change relay state digitalWrite(message.sensor-CHILD_ID_RELAY+RELAY, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eepromI think you copied it from the multiple relays example.
try changing that code to
if (message.type==V_LIGHT) { // Change relay state digitalWrite( RELAY, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eepromIn your code, you are not writing the value to the pin you've assigned to the relay.
-
Thank you for your help
it works for relay and dth11
always the same pir sensors
-
on the picture have there a motion sensor that appears
-
This post is deleted!
-
AC works thank you for your help
#include <SPI.h> #include <MySensor.h> #include <Wire.h> #include <DHT.h> #include <SimpleTimer.h> #define CHILD_ID_HUM 1 #define CHILD_ID_TEMP 2 #define CHILD_ID_MOTION 3 #define CHILD_ID_RELAY 4 #define HUMIDITY_SENSOR_DIGITAL_PIN 4 #define MOTION_SENSOR_DIGITAL_PIN 3 #define INTERRUPT MOTION_SENSOR_DIGITAL_PIN-2 // Usually the interrupt = pin -2 (on uno/nano anyway) #define RELAY 7 // Arduino Digital I/O pin number for first relay (second on pin+1 etc) #define RELAY_ON 0 // GPIO value to write to turn on attached relay #define RELAY_OFF 1 // GPIO value to write to turn off attached relay unsigned long SLEEP_TIME = 600000; // Sleep time between reads (in milliseconds) - 10mins MySensor gw; DHT dht; SimpleTimer timer; float lastTemp; float lastHum; boolean lastTripped; boolean metric = true; MyMessage msgHum(CHILD_ID_HUM, V_HUM); MyMessage msgTemp(CHILD_ID_TEMP, V_TEMP); MyMessage msg(CHILD_ID_MOTION, V_TRIPPED); void setup() { // Initialize library and add callback for incoming messages gw.begin(incomingMessage, AUTO, true); dht.setup(HUMIDITY_SENSOR_DIGITAL_PIN); // Send the Sketch Version Information to the Gateway gw.sendSketchInfo("HumTempRelayMotion", "1.0"); // REGISTER all sensors to gw (they will be created as child devices) gw.present(CHILD_ID_HUM, S_HUM); gw.present(CHILD_ID_TEMP, S_TEMP); gw.present(CHILD_ID_MOTION, S_MOTION); gw.present(CHILD_ID_RELAY, S_LIGHT); pinMode(RELAY, OUTPUT); digitalWrite(RELAY, gw.loadState(RELAY)?RELAY_OFF:RELAY_ON); //Serial.begin(9600); timer.setInterval(30000, getMeasure); metric = gw.getConfig().isMetric; } void loop() { // Alway process incoming messages whenever possible gw.process(); timer.run(); boolean tripped = digitalRead(MOTION_SENSOR_DIGITAL_PIN) == HIGH; if (tripped != lastTripped) { lastTripped = tripped; Serial.print("M: "); Serial.println(tripped); gw.send(msg.set(tripped?"1":"0")); // Send tripped value to gw } } void incomingMessage(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_LIGHT) { // Change relay state digitalWrite(message.sensor-CHILD_ID_RELAY+RELAY, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eeprom gw.saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } void getMeasure() { delay(dht.getMinimumSamplingPeriod()); float temperature = dht.getTemperature(); if (isnan(temperature)) { Serial.println("Failed reading temperature from DHT"); } else if (temperature != lastTemp) { lastTemp = temperature; if (!metric) { temperature = dht.toFahrenheit(temperature); } gw.send(msgTemp.set(temperature, 1)); Serial.print("T: "); Serial.println(temperature); } float humidity = dht.getHumidity(); if (isnan(humidity)) { Serial.println("Failed reading humidity from DHT"); } else if (humidity != lastHum) { lastHum = humidity; gw.send(msgHum.set(humidity, 1)); Serial.print("H: "); Serial.println(humidity); } } Insert Code Here
Suggested Topics
-

Welcome
Announcements • • hek