Help Please "Rain Water Tank"
-
I have a problem with my sketch.
Can somebody help me?// Enable debug prints #define MY_DEBUG #define MY_NODE_ID 103 // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <NewPing.h> #define CHILD_ID_V 0 #define CHILD_ID_D 1 #define TRIGGER_PIN 6 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 5 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_DISTANCE 300 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. #define RELAY_PIN 4 // Arduino Digital I/O pin number for first relay #define NUMBER_OF_RELAYS 1 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay //constant to calculate the volume of the tank #define high_water_level 230 //tank depth from the lowest point to the max water level #define distance_sensor 10 //distance in cm between the max water level and the sensor #define tank_volume 15000 //tank volume when it is fitted to the max water level unsigned long SLEEP_TIME = 3000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. MyMessage volume_msg(CHILD_ID_V, V_VOLUME); MyMessage distance_msg(CHILD_ID_D, V_DISTANCE); int lastDist; bool metric = true; void before() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins in output mode pinMode(pin, OUTPUT); } } void setup() { metric = getControllerConfig().isMetric; } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Rain Water Tank", "1.0"); for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); } // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_V, S_WATER); present(CHILD_ID_D, S_DISTANCE); } void loop() { int dist = metric?sonar.ping_cm():sonar.ping_in(); Serial.print("Volume "); Serial.print(tank_level("liters")); Serial.println("L"); Serial.print("Ping: "); Serial.print(dist); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println(metric?" cm":" in"); if (dist != lastDist) { send(distance_msg.set(dist)); lastDist = dist; } send(volume_msg.set(tank_level("liters"))); sleep(SLEEP_TIME); } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_STATUS) { // Change relay state digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eeprom saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } //function to measure and convert the tank volume int tank_level(String unit) { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * ((tank_volume) / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } } -
I have a problem with my sketch.
Can somebody help me?// Enable debug prints #define MY_DEBUG #define MY_NODE_ID 103 // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <NewPing.h> #define CHILD_ID_V 0 #define CHILD_ID_D 1 #define TRIGGER_PIN 6 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 5 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_DISTANCE 300 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. #define RELAY_PIN 4 // Arduino Digital I/O pin number for first relay #define NUMBER_OF_RELAYS 1 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay //constant to calculate the volume of the tank #define high_water_level 230 //tank depth from the lowest point to the max water level #define distance_sensor 10 //distance in cm between the max water level and the sensor #define tank_volume 15000 //tank volume when it is fitted to the max water level unsigned long SLEEP_TIME = 3000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. MyMessage volume_msg(CHILD_ID_V, V_VOLUME); MyMessage distance_msg(CHILD_ID_D, V_DISTANCE); int lastDist; bool metric = true; void before() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins in output mode pinMode(pin, OUTPUT); } } void setup() { metric = getControllerConfig().isMetric; } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Rain Water Tank", "1.0"); for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); } // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_V, S_WATER); present(CHILD_ID_D, S_DISTANCE); } void loop() { int dist = metric?sonar.ping_cm():sonar.ping_in(); Serial.print("Volume "); Serial.print(tank_level("liters")); Serial.println("L"); Serial.print("Ping: "); Serial.print(dist); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println(metric?" cm":" in"); if (dist != lastDist) { send(distance_msg.set(dist)); lastDist = dist; } send(volume_msg.set(tank_level("liters"))); sleep(SLEEP_TIME); } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_STATUS) { // Change relay state digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eeprom saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } //function to measure and convert the tank volume int tank_level(String unit) { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * ((tank_volume) / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } } -
@wuffi0815 probably. But it would be a whole lot easier if you told us what problem you are experiencing. We don't have many psychics here.
@mfalkvidd Nobody could see that coming, precisely underlining your response..... :ok_hand:
-
I want to know the filling level of the tank and drive a pump.
Should everything also run in fhem.
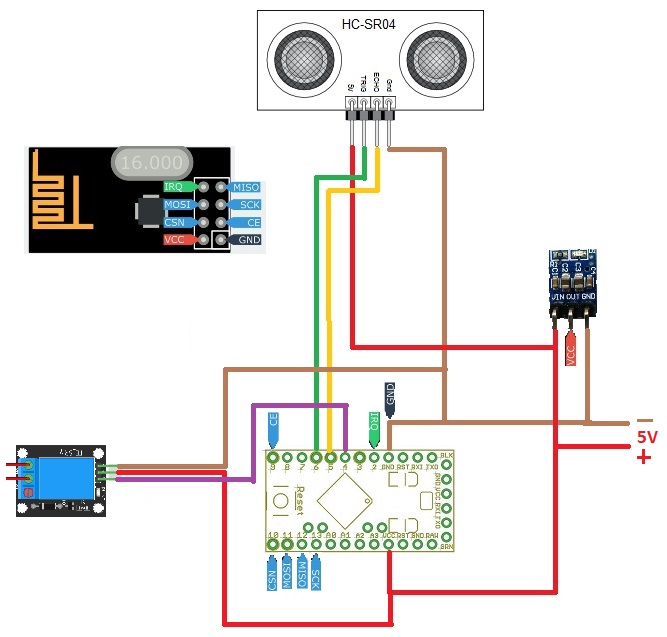
Components: Arduino; HC-SR04; 10 A 1 Channel Arduino Compatible Relay Module
@wuffi0815 You skipped right past "But it would be a whole lot easier if you told us what problem you are experiencing." and headed out into the desert....
-
The distance is not displayed. And goes into a loop.
Sometimes I have to refresh 2-3xno Connect: !TSF:MSG:SEND,102-103-0-0,s=1,c=1,t=35,pt=2,l=2,sg=0,ft=5,st=NACK:2457
@wuffi0815 "The distance is not displayed. And goes into a loop.
Sometimes I have to refresh 2-3x"
?
That's all? Oh well, seems simple really, you just change A for B, and give C a slight squeeze, but only on the left side, then give it a wallop with a cotton bud, almost guaranteed to fix it....
Taking the mickey aside, please give details, unless the complete absence of information is deliberate... -
Works fine so far but the relay can not be controlled after about 30min.
Can it be that my arduino nano pro is too weak?
// Enable debug prints #define MY_DEBUG #define MY_NODE_ID 103 // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <NewPing.h> #define CHILD_ID_V 2 #define CHILD_ID_D 3 #define TRIGGER_PIN 6 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 5 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_DISTANCE 300 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. #define RELAY_PIN 4 // Arduino Digital I/O pin number for first relay #define NUMBER_OF_RELAYS 1 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay //constant to calculate the volume of the tank #define high_water_level 230 //tank depth from the lowest point to the max water level #define distance_sensor 10 //distance in cm between the max water level and the sensor #define tank_volume 15000 //tank volume when it is fitted to the max water level unsigned long SLEEP_TIME = 36000; // Sleep time between reads (in milliseconds)3600000 = 1h NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. MyMessage volume_msg(CHILD_ID_V, V_VOLUME); MyMessage distance_msg(CHILD_ID_D, V_DISTANCE); int lastDist; bool metric = true; void before() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins in output mode pinMode(pin, OUTPUT); } } void setup() { metric = getControllerConfig().isMetric; } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Rain Water Tank", "1.0"); for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); } // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_V, S_WATER); present(CHILD_ID_D, S_DISTANCE); } void loop() { int dist = metric?sonar.ping_cm():sonar.ping_in(); Serial.print("Volume "); Serial.print(tank_level("liters")); Serial.println("L"); Serial.print("Ping: "); Serial.print(dist); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println(metric?" cm":" in"); if (dist != lastDist) { send(distance_msg.set(dist)); lastDist = dist; } send(volume_msg.set(tank_level("liters"))); sleep(SLEEP_TIME); } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_STATUS) { // Change relay state digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eeprom saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } //function to measure and convert the tank volume int tank_level(String unit) { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * ((tank_volume) / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } } -
Provide a detailed sketch/circuit and then I am sure we can find the answer. It might be that your power circuit is not adequate, but it is difficult to ascertain until one can review the diagram.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login