Help Please "Rain Water Tank"
-
I have a problem with my sketch.
Can somebody help me?// Enable debug prints #define MY_DEBUG #define MY_NODE_ID 103 // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <NewPing.h> #define CHILD_ID_V 0 #define CHILD_ID_D 1 #define TRIGGER_PIN 6 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 5 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_DISTANCE 300 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. #define RELAY_PIN 4 // Arduino Digital I/O pin number for first relay #define NUMBER_OF_RELAYS 1 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay //constant to calculate the volume of the tank #define high_water_level 230 //tank depth from the lowest point to the max water level #define distance_sensor 10 //distance in cm between the max water level and the sensor #define tank_volume 15000 //tank volume when it is fitted to the max water level unsigned long SLEEP_TIME = 3000; // Sleep time between reads (in milliseconds) NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. MyMessage volume_msg(CHILD_ID_V, V_VOLUME); MyMessage distance_msg(CHILD_ID_D, V_DISTANCE); int lastDist; bool metric = true; void before() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins in output mode pinMode(pin, OUTPUT); } } void setup() { metric = getControllerConfig().isMetric; } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Rain Water Tank", "1.0"); for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); } // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_V, S_WATER); present(CHILD_ID_D, S_DISTANCE); } void loop() { int dist = metric?sonar.ping_cm():sonar.ping_in(); Serial.print("Volume "); Serial.print(tank_level("liters")); Serial.println("L"); Serial.print("Ping: "); Serial.print(dist); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println(metric?" cm":" in"); if (dist != lastDist) { send(distance_msg.set(dist)); lastDist = dist; } send(volume_msg.set(tank_level("liters"))); sleep(SLEEP_TIME); } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_STATUS) { // Change relay state digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eeprom saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } //function to measure and convert the tank volume int tank_level(String unit) { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * ((tank_volume) / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }
-
@wuffi0815 probably. But it would be a whole lot easier if you told us what problem you are experiencing. We don't have many psychics here.
-
@mfalkvidd Nobody could see that coming, precisely underlining your response.....

-
I want to know the filling level of the tank and drive a pump.
Should everything also run in fhem.
Components: Arduino; HC-SR04; 10 A 1 Channel Arduino Compatible Relay Module
-
@wuffi0815 You skipped right past "But it would be a whole lot easier if you told us what problem you are experiencing." and headed out into the desert....
-
The distance is not displayed. And goes into a loop.
Sometimes I have to refresh 2-3xno Connect: !TSF:MSG:SEND,102-103-0-0,s=1,c=1,t=35,pt=2,l=2,sg=0,ft=5,st=NACK:2457
-
@wuffi0815 "The distance is not displayed. And goes into a loop.
Sometimes I have to refresh 2-3x"
?
That's all? Oh well, seems simple really, you just change A for B, and give C a slight squeeze, but only on the left side, then give it a wallop with a cotton bud, almost guaranteed to fix it....
Taking the mickey aside, please give details, unless the complete absence of information is deliberate...
-
Please keep a nice tone folks.
You seem to present sensors with the same id twice. CHILD_ID_D=1 (S_DISTANCE) and in the loop
sensorstarts with id 1 also (S_BINARY).
-
Thank You Is working!
From time to time you overlook small errors with great effect.")
-
Works fine so far but the relay can not be controlled after about 30min.
Can it be that my arduino nano pro is too weak?
// Enable debug prints #define MY_DEBUG #define MY_NODE_ID 103 // Enable and select radio type attached #define MY_RADIO_NRF24 #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <NewPing.h> #define CHILD_ID_V 2 #define CHILD_ID_D 3 #define TRIGGER_PIN 6 // Arduino pin tied to trigger pin on the ultrasonic sensor. #define ECHO_PIN 5 // Arduino pin tied to echo pin on the ultrasonic sensor. #define MAX_DISTANCE 300 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm. #define RELAY_PIN 4 // Arduino Digital I/O pin number for first relay #define NUMBER_OF_RELAYS 1 // Total number of attached relays #define RELAY_ON 1 // GPIO value to write to turn on attached relay #define RELAY_OFF 0 // GPIO value to write to turn off attached relay //constant to calculate the volume of the tank #define high_water_level 230 //tank depth from the lowest point to the max water level #define distance_sensor 10 //distance in cm between the max water level and the sensor #define tank_volume 15000 //tank volume when it is fitted to the max water level unsigned long SLEEP_TIME = 36000; // Sleep time between reads (in milliseconds)3600000 = 1h NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance. MyMessage volume_msg(CHILD_ID_V, V_VOLUME); MyMessage distance_msg(CHILD_ID_D, V_DISTANCE); int lastDist; bool metric = true; void before() { for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Then set relay pins in output mode pinMode(pin, OUTPUT); } } void setup() { metric = getControllerConfig().isMetric; } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Rain Water Tank", "1.0"); for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) { // Register all sensors to gw (they will be created as child devices) present(sensor, S_BINARY); } // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_V, S_WATER); present(CHILD_ID_D, S_DISTANCE); } void loop() { int dist = metric?sonar.ping_cm():sonar.ping_in(); Serial.print("Volume "); Serial.print(tank_level("liters")); Serial.println("L"); Serial.print("Ping: "); Serial.print(dist); // Convert ping time to distance in cm and print result (0 = outside set distance range) Serial.println(metric?" cm":" in"); if (dist != lastDist) { send(distance_msg.set(dist)); lastDist = dist; } send(volume_msg.set(tank_level("liters"))); sleep(SLEEP_TIME); } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.type==V_STATUS) { // Change relay state digitalWrite(message.sensor-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF); // Store state in eeprom saveState(message.sensor, message.getBool()); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } } //function to measure and convert the tank volume int tank_level(String unit) { int level_liters = 0,level_percent = 0, echo_us = 0, echo_cm = 0, water_level_cm = 0; echo_us = sonar.ping_median(); //return the median time of 5measures between the ping and the echo in microseconds echo_cm = echo_us / US_ROUNDTRIP_CM; //convert the echo time to distance in cm. water_level_cm = high_water_level - (echo_cm - distance_sensor); level_liters = water_level_cm * ((tank_volume) / high_water_level); level_percent = (water_level_cm * 100) / high_water_level; if (unit == "liters") { return level_liters; } else if (unit == "percent") { return level_percent; } else { return 0; } }
-
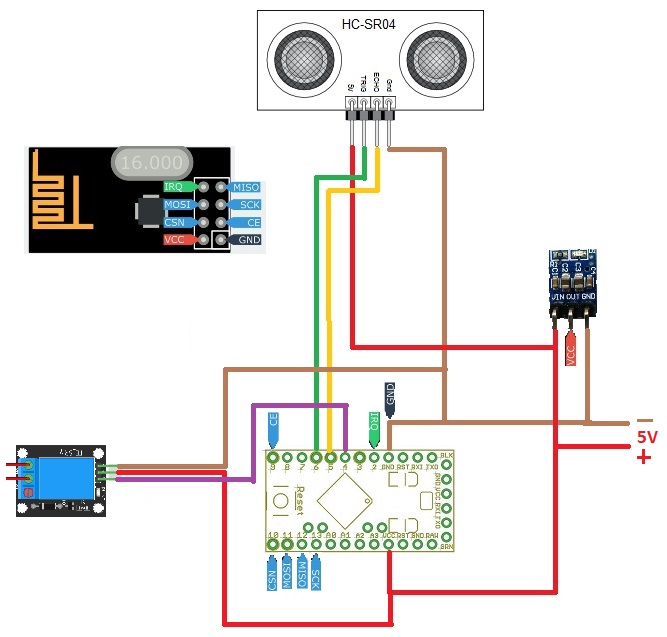
Provide a detailed sketch/circuit and then I am sure we can find the answer. It might be that your power circuit is not adequate, but it is difficult to ascertain until one can review the diagram.
-
Sorry for my bad drawing skills.
-
So what is giving 5v to this?