CAN bus transport implementation
-
Hi,
I'm trying to add CAN transmission to MySensors.
This is my fork: https://github.com/AdamSlowik/MySensors/tree/feature/can
This is how I connected my CAN modules to arduino (except pin INT of CAN module is connected to pin 2 of arduino):
https://www.14core.com/wiring-the-two-mcp2515-stand-alone-can-controller-with-spi/My CAN module is popular one (mpc2515 with tja1050)
My fork contains following examples:
-GatewaySerialCAN
-CANSwitch (simpler version of BinarySwitchSleepSensor)Heavy lifting (MCP2515 driver stuff) is done by https://github.com/coryjfowler/MCP_CAN_lib
After uploading mentioned sketches to arduinos, sensor sends frame. I belive this is request for new node ID (it's 7 bytes long).
Gateway recives this frame (data is same as in sensor side). After that strange things happens. Gateway ends up in some endless loop calling 'transportDataAvailable'. This might be normal but 'IF' statement 'if(!hwDigitalRead(CAN0_INT))' is always true. Because this statement is true program reads data from CAN. Since 'IF' statement (in my opinion) is false positiv, data from CAN are garbage (0xFFFFFFFF).Two easiest explenation for me are:
a) Gateway uses pin 2 and this interfere with communication code
b) Used CAN library is somehow incompatible with MySensorsI belive wiring issue is not the case. All things are soldered in universal board and tested with examples provided by CAN library.
Can someone look at My code especialy at how I use pin 2?
Perhaps someone have CAN modules to reproduce My issue?
-
@Adam-Slowik Afaik, 0xFFFFFFFFF isn't garbage but the request to the controller to assign a ChildID. So most likely, you have to create a special handler for such a request (comparable to what nRF24 or RFM drivers most likely do) or make sure to assign a ChildID in every node's sketch manually (similar to RS485 transport layer usage).
-
Hi,
I've made some progress. There was some basic bug (details in repository). Now gateway and sensor talk to each other, but there is some misunderstanding between them.
I'll try to figure it out, but any help with logs analysis is welcome.
In
attachmentsbelow are log samples. Gateway starts first. Debug logs are disabled (my custom logs are using to much memory). Sensor debug logs are enabled.The question is why sensor restarts communication?
Hints how to read logs:
"19:07:45.523 -> Entering Configuration Mode Successful!"
this log is from library. It appers on transmission initialization / reinitilization'send' prefix:
19:07:45.556 -> send partLen: 7
long messages are split. This is length of current part19:07:45.556 -> send data: 255;255;255;2;3;7;255;.
data send in this part19:07:45.556 -> send CAN len: 7
Whole message length19:07:45.556 -> send CAN noOfFrames: 1
number of frames required to send complete message.19:07:45.590 -> send CAN id: 2148597504
CAN id19:07:45.590 -> send packet sent
this message indicates success.'READ CAN' prefix. This prefix is used inside 'transportDataAvailable()'
19:07:46.618 -> READ CAN id: 2148597504
CAN id.19:07:46.618 -> READ CAN from: 0
message received from address19:07:46.618 -> READ CAN to: 255
message send to address19:07:46.618 -> READ CAN currentPart: 0
current part (counter starts from 0)19:07:46.618 -> READ CAN totalPartCount: 1
total part count (counter starts from 1 :))19:07:46.618 -> READ CAN messageId: 0
message id. Right now always 0;19:07:46.618 -> READ CAN data:
19:07:46.618 -> 0, 0, 255, 10, 35, 8, 255, 0,
received data19:07:46.618 -> READ CAN SLOT: 7
buffer index19:07:46.618 -> READ CAN lastReceivedPart: 1
number of received parts19:07:46.618 -> READ CAN packet received
this logs indicates that entire message was assembled and controller can call 'transportReceive''transport receive' prefix is used inside 'transportReceive()'
19:07:46.618 -> transport receive called
'transportReceive()' was called[0_1594748956959_sensor](Uploading 100%)19:07:46.618 -> transport receive data: 0, 0, 255, 10, 35, 8, 255, 0,
data was found and returned.gateway logs:
19:07:37.398 -> Entering Configuration Mode Successful! 19:07:37.398 -> Setting Baudrate Successful! 19:07:37.398 -> Starting to Set Mask! 19:07:37.398 -> Setting Mask Successful! 19:07:37.398 -> Starting to Set Filter! 19:07:37.398 -> Setting Filter Successfull! 19:07:37.398 -> Starting to Set Filter! 19:07:37.398 -> Setting Filter Successfull! 19:07:37.398 -> Starting to Set Mask! 19:07:37.432 -> Setting Mask Successful! 19:07:37.432 -> Starting to Set Filter! 19:07:37.432 -> Setting Filter Successfull! 19:07:37.432 -> Starting to Set Filter! 19:07:37.432 -> Setting Filter Successfull! 19:07:37.432 -> Starting to Set Filter! 19:07:37.432 -> Setting Filter Successfull! 19:07:37.432 -> Starting to Set Filter! 19:07:37.432 -> Setting Filter Successfull! 19:07:37.432 -> 0;255;3;0;14;Gateway startup complete. 19:07:37.432 -> 0;255;0;0;18;2.4.0-alpha 19:07:37.432 -> send partLen: 7 19:07:37.432 -> send data: 0;0;255;2;3;20;255;. 19:07:37.432 -> send CAN len: 7 19:07:37.432 -> send CAN noOfFrames: 1 19:07:37.465 -> send CAN id: 2148597504 19:07:37.465 -> send packet sent 19:07:45.556 -> READ CAN id: 2148597504 19:07:45.589 -> READ CAN from: 0 19:07:45.589 -> READ CAN to: 255 19:07:45.589 -> READ CAN currentPart: 0 19:07:45.589 -> READ CAN totalPartCount: 1 19:07:45.589 -> READ CAN messageId: 0 19:07:45.589 -> READ CAN data: 19:07:45.589 -> 255, 255, 255, 2, 3, 7, 255, 19:07:45.589 -> READ CAN SLOT: 7 19:07:45.589 -> READ CAN lastReceivedPart: 1 19:07:45.589 -> READ CAN packet received 19:07:45.589 -> transport receive called 19:07:45.589 -> transport receive data: 255, 255, 255, 2, 3, 7, 255, 19:07:46.617 -> send partLen: 8 19:07:46.617 -> send data: 0;0;255;10;35;8;255;0;. 19:07:46.617 -> send CAN len: 8 19:07:46.617 -> send CAN noOfFrames: 1 19:07:46.617 -> send CAN id: 2148597504 19:07:46.617 -> send packet sent 19:07:47.579 -> READ CAN id: 2148532224 19:07:47.612 -> READ CAN from: 0 19:07:47.612 -> READ CAN to: 0 19:07:47.612 -> READ CAN currentPart: 0 19:07:47.612 -> READ CAN totalPartCount: 1 19:07:47.612 -> READ CAN messageId: 0 19:07:47.612 -> READ CAN data: 19:07:47.612 -> 255, 255, 0, 2, 3, 3, 48, 19:07:47.612 -> READ CAN SLOT: 7 19:07:47.612 -> READ CAN lastReceivedPart: 1 19:07:47.612 -> READ CAN packet received 19:07:47.612 -> transport receive called 19:07:47.612 -> transport receive data: 255, 255, 0, 2, 3, 3, 48, 19:07:47.612 -> 255;48;3;0;3; 19:07:49.601 -> READ CAN id: 2148532224 19:07:49.601 -> READ CAN from: 0 19:07:49.635 -> READ CAN to: 0 19:07:49.635 -> READ CAN currentPart: 0 19:07:49.635 -> READ CAN totalPartCount: 1 19:07:49.635 -> READ CAN messageId: 0 19:07:49.635 -> READ CAN data: 19:07:49.635 -> 255, 255, 0, 2, 3, 3, 21, 19:07:49.635 -> READ CAN SLOT: 7 19:07:49.635 -> READ CAN lastReceivedPart: 1 19:07:49.635 -> READ CAN packet received 19:07:49.635 -> transport receive called 19:07:49.635 -> transport receive data: 255, 255, 0, 2, 3, 3, 21, 19:07:49.635 -> 255;21;3;0;3; 19:07:51.624 -> READ CAN id: 2148532224 19:07:51.657 -> READ CAN from: 0 19:07:51.657 -> READ CAN to: 0 19:07:51.657 -> READ CAN currentPart: 0 19:07:51.657 -> READ CAN totalPartCount: 1 19:07:51.657 -> READ CAN messageId: 0 19:07:51.657 -> READ CAN data: 19:07:51.657 -> 255, 255, 0, 2, 3, 3, 249, 19:07:51.657 -> READ CAN SLOT: 7 19:07:51.657 -> READ CAN lastReceivedPart: 1 19:07:51.657 -> READ CAN packet received 19:07:51.657 -> transport receive called 19:07:51.657 -> transport receive data: 255, 255, 0, 2, 3, 3, 249, 19:07:51.657 -> 255;249;3;0;3; 19:07:53.646 -> READ CAN id: 2148532224 19:07:53.646 -> READ CAN from: 0 19:07:53.679 -> READ CAN to: 0 19:07:53.679 -> READ CAN currentPart: 0 19:07:53.679 -> READ CAN totalPartCount: 1 19:07:53.679 -> READ CAN messageId: 0 19:07:53.679 -> READ CAN data: 19:07:53.679 -> 255, 255, 0, 2, 3, 3, 222, 19:07:53.679 -> READ CAN SLOT: 7 19:07:53.679 -> READ CAN lastReceivedPart: 1 19:07:53.679 -> READ CAN packet received 19:07:53.679 -> transport receive called 19:07:53.679 -> transport receive data: 255, 255, 0, 2, 3, 3, 222, 19:07:53.679 -> 255;222;3;0;3; 19:08:05.746 -> READ CAN id: 2148597504 19:08:05.746 -> READ CAN from: 0 19:08:05.746 -> READ CAN to: 255 19:08:05.746 -> READ CAN currentPart: 0 19:08:05.746 -> READ CAN totalPartCount: 1 19:08:05.746 -> READ CAN messageId: 0 19:08:05.746 -> READ CAN data: 19:08:05.746 -> 255, 255, 255, 2, 3, 7, 255, 19:08:05.746 -> READ CAN SLOT: 7 19:08:05.746 -> READ CAN lastReceivedPart: 1 19:08:05.746 -> READ CAN packet received 19:08:05.746 -> transport receive called 19:08:05.746 -> transport receive data: 255, 255, 255, 2, 3, 7, 255, 19:08:06.376 -> send partLen: 8 19:08:06.376 -> send data: 0;0;255;10;35;8;255;0;. 19:08:06.409 -> send CAN len: 8 19:08:06.409 -> send CAN noOfFrames: 1 19:08:06.409 -> send CAN id: 2148597504 19:08:06.409 -> send packet sent 19:08:07.768 -> READ CAN id: 2148532224 19:08:07.768 -> READ CAN from: 0 19:08:07.768 -> READ CAN to: 0 19:08:07.768 -> READ CAN currentPart: 0 19:08:07.768 -> READ CAN totalPartCount: 1 19:08:07.768 -> READ CAN messageId: 0 19:08:07.768 -> READ CAN data: 19:08:07.768 -> 255, 255, 0, 2, 3, 3, 238, 19:08:07.768 -> READ CAN SLOT: 7 19:08:07.768 -> READ CAN lastReceivedPart: 1 19:08:07.768 -> READ CAN packet received 19:08:07.768 -> transport receive called 19:08:07.768 -> transport receive data: 255, 255, 0, 2, 3, 3, 238, 19:08:07.802 -> 255;238;3;0;3; 19:08:09.791 -> READ CAN id: 2148532224 19:08:09.791 -> READ CAN from: 0 19:08:09.791 -> READ CAN to: 0 19:08:09.791 -> READ CAN currentPart: 0 19:08:09.791 -> READ CAN totalPartCount: 1 19:08:09.791 -> READ CAN messageId: 0 19:08:09.791 -> READ CAN data: 19:08:09.791 -> 255, 255, 0, 2, 3, 3, 212, 19:08:09.791 -> READ CAN SLOT: 7 19:08:09.791 -> READ CAN lastReceivedPart: 1 19:08:09.791 -> READ CAN packet received 19:08:09.791 -> transport receive called 19:08:09.791 -> transport receive data: 255, 255, 0, 2, 3, 3, 212, 19:08:09.824 -> 255;212;3;0;3; 19:08:11.812 -> READ CAN id: 2148532224 19:08:11.812 -> READ CAN from: 0 19:08:11.812 -> READ CAN to: 0 19:08:11.812 -> READ CAN currentPart: 0 19:08:11.812 -> READ CAN totalPartCount: 1 19:08:11.812 -> READ CAN messageId: 0 19:08:11.812 -> READ CAN data: 19:08:11.812 -> 255, 255, 0, 2, 3, 3, 185, 19:08:11.812 -> READ CAN SLOT: 7 19:08:11.812 -> READ CAN lastReceivedPart: 1 19:08:11.812 -> READ CAN packet received 19:08:11.812 -> transport receive called 19:08:11.812 -> transport receive data: 255, 255, 0, 2, 3, 3, 185, 19:08:11.846 -> 255;185;3;0;3; 19:08:13.834 -> READ CAN id: 2148532224 19:08:13.834 -> READ CAN from: 0 19:08:13.834 -> READ CAN to: 0 19:08:13.834 -> READ CAN currentPart: 0 19:08:13.834 -> READ CAN totalPartCount: 1 19:08:13.834 -> READ CAN messageId: 0 19:08:13.834 -> READ CAN data: 19:08:13.834 -> 255, 255, 0, 2, 3, 3, 157, 19:08:13.834 -> READ CAN SLOT: 7 19:08:13.834 -> READ CAN lastReceivedPart: 1 19:08:13.834 -> READ CAN packet received 19:08:13.834 -> transport receive called 19:08:13.834 -> transport receive data: 255, 255, 0, 2, 3, 3, 157, 19:08:13.867 -> 255;157;3;0;3; 19:08:25.900 -> READ CAN id: 2148597504 19:08:25.900 -> READ CAN from: 0 19:08:25.900 -> READ CAN to: 255 19:08:25.900 -> READ CAN currentPart: 0 19:08:25.900 -> READ CAN totalPartCount: 1 19:08:25.900 -> READ CAN messageId: 0 19:08:25.900 -> READ CAN data: 19:08:25.900 -> 255, 255, 255, 2, 3, 7, 255, 19:08:25.900 -> READ CAN SLOT: 7 19:08:25.900 -> READ CAN lastReceivedPart: 1 19:08:25.933 -> READ CAN packet received 19:08:25.933 -> transport receive called 19:08:25.933 -> transport receive data: 255, 255, 255, 2, 3, 7, 255, 19:08:26.165 -> send partLen: 8 19:08:26.165 -> send data: 0;0;255;10;35;8;255;0;. 19:08:26.165 -> send CAN len: 8 19:08:26.198 -> send CAN noOfFrames: 1 19:08:26.198 -> send CAN id: 2148597504 19:08:26.198 -> send packet sent 19:08:27.922 -> READ CAN id: 2148532224 19:08:27.922 -> READ CAN from: 0 19:08:27.922 -> READ CAN to: 0 19:08:27.922 -> READ CAN currentPart: 0 19:08:27.922 -> READ CAN totalPartCount: 1 19:08:27.922 -> READ CAN messageId: 0 19:08:27.922 -> READ CAN data: 19:08:27.922 -> 255, 255, 0, 2, 3, 3, 175, 19:08:27.958 -> READ CAN SLOT: 7 19:08:27.958 -> READ CAN lastReceivedPart: 1 19:08:27.958 -> READ CAN packet received 19:08:27.958 -> transport receive called 19:08:27.958 -> transport receive data: 255, 255, 0, 2, 3, 3, 175, 19:08:27.958 -> 255;175;3;0;3; 19:08:29.945 -> READ CAN id: 2148532224 19:08:29.945 -> READ CAN from: 0 19:08:29.945 -> READ CAN to: 0 19:08:29.945 -> READ CAN currentPart: 0 19:08:29.945 -> READ CAN totalPartCount: 1 19:08:29.945 -> READ CAN messageId: 0 19:08:29.945 -> READ CAN data: 19:08:29.945 -> 255, 255, 0, 2, 3, 3, 148, 19:08:29.978 -> READ CAN SLOT: 7 19:08:29.978 -> READ CAN lastReceivedPart: 1 19:08:29.978 -> READ CAN packet received 19:08:29.978 -> transport receive called 19:08:29.978 -> transport receive data: 255, 255, 0, 2, 3, 3, 148, 19:08:29.978 -> 255;148;3;0;3; 19:08:31.967 -> READ CAN id: 2148532224 19:08:31.967 -> READ CAN from: 0 19:08:31.967 -> READ CAN to: 0 19:08:31.967 -> READ CAN currentPart: 0 19:08:31.967 -> READ CAN totalPartCount: 1 19:08:31.967 -> READ CAN messageId: 0 19:08:31.967 -> READ CAN data: 19:08:31.967 -> 255, 255, 0, 2, 3, 3, 120, 19:08:31.967 -> READ CAN SLOT: 7 19:08:31.967 -> READ CAN lastReceivedPart: 1 19:08:32.000 -> READ CAN packet received 19:08:32.000 -> transport receive called 19:08:32.000 -> transport receive data: 255, 255, 0, 2, 3, 3, 120, 19:08:32.000 -> 255;120;3;0;3; 19:08:33.989 -> READ CAN id: 2148532224 19:08:33.989 -> READ CAN from: 0 19:08:33.989 -> READ CAN to: 0 19:08:33.989 -> READ CAN currentPart: 0 19:08:33.989 -> READ CAN totalPartCount: 1 19:08:33.989 -> READ CAN messageId: 0 19:08:33.989 -> READ CAN data: 19:08:33.989 -> 255, 255, 0, 2, 3, 3, 93, 19:08:33.989 -> READ CAN SLOT: 7 19:08:33.989 -> READ CAN lastReceivedPart: 1 19:08:33.989 -> READ CAN packet received 19:08:34.023 -> transport receive called 19:08:34.023 -> transport receive data: 255, 255, 0, 2, 3, 3, 93, 19:08:34.023 -> 255;93;3;0;3; 19:08:46.059 -> READ CAN id: 2148597504 19:08:46.059 -> READ CAN from: 0 19:08:46.059 -> READ CAN to: 255 19:08:46.059 -> READ CAN currentPart: 0 19:08:46.059 -> READ CAN totalPartCount: 1 19:08:46.059 -> READ CAN messageId: 0 19:08:46.059 -> READ CAN data: 19:08:46.092 -> 255, 255, 255, 2, 3, 7, 255, 19:08:46.092 -> READ CAN SLOT: 7 19:08:46.092 -> READ CAN lastReceivedPart: 1 19:08:46.092 -> READ CAN packet received 19:08:46.092 -> transport receive called 19:08:46.092 -> transport receive data: 255, 255, 255, 2, 3, 7, 255, 19:08:46.987 -> send partLen: 8 19:08:46.987 -> send data: 0;0;255;10;35;8;255;0;. 19:08:46.987 -> send CAN len: 8 19:08:46.987 -> send CAN noOfFrames: 1 19:08:46.987 -> send CAN id: 2148597504 19:08:46.987 -> send packet sentsensor logs:
19:07:45.490 -> 19:07:45.490 -> __ __ ____ 19:07:45.490 -> | \/ |_ _/ ___| ___ _ __ ___ ___ _ __ ___ 19:07:45.490 -> | |\/| | | | \___ \ / _ \ `_ \/ __|/ _ \| `__/ __| 19:07:45.490 -> | | | | |_| |___| | __/ | | \__ \ _ | | \__ \ 19:07:45.490 -> |_| |_|\__, |____/ \___|_| |_|___/\___/|_| |___/ 19:07:45.523 -> |___/ 2.4.0-alpha 19:07:45.523 -> 19:07:45.523 -> 17 MCO:BGN:INIT NODE,CP=RCNNA---,FQ=16,REL=0,VER=2.4.0-alpha 19:07:45.523 -> 27 TSM:INIT 19:07:45.523 -> 28 TSF:WUR:MS=0 19:07:45.523 -> Entering Configuration Mode Successful! 19:07:45.523 -> Setting Baudrate Successful! 19:07:45.523 -> Starting to Set Mask! 19:07:45.523 -> Setting Mask Successful! 19:07:45.523 -> Starting to Set Filter! 19:07:45.523 -> Setting Filter Successfull! 19:07:45.523 -> Starting to Set Filter! 19:07:45.523 -> Setting Filter Successfull! 19:07:45.556 -> Starting to Set Mask! 19:07:45.556 -> Setting Mask Successful! 19:07:45.556 -> Starting to Set Filter! 19:07:45.556 -> Setting Filter Successfull! 19:07:45.556 -> Starting to Set Filter! 19:07:45.556 -> Setting Filter Successfull! 19:07:45.556 -> Starting to Set Filter! 19:07:45.556 -> Setting Filter Successfull! 19:07:45.556 -> Starting to Set Filter! 19:07:45.556 -> Setting Filter Successfull! 19:07:45.556 -> 66 TSM:INIT:TSP OK 19:07:45.556 -> 73 TSM:FPAR 19:07:45.556 -> send partLen: 7 19:07:45.556 -> send data: 255;255;255;2;3;7;255;. 19:07:45.556 -> send CAN len: 7 19:07:45.556 -> send CAN noOfFrames: 1 19:07:45.590 -> send CAN id: 2148597504 19:07:45.590 -> send packet sent 19:07:45.590 -> 80 ?TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 19:07:46.618 -> READ CAN id: 2148597504 19:07:46.618 -> READ CAN from: 0 19:07:46.618 -> READ CAN to: 255 19:07:46.618 -> READ CAN currentPart: 0 19:07:46.618 -> READ CAN totalPartCount: 1 19:07:46.618 -> READ CAN messageId: 0 19:07:46.618 -> READ CAN data: 19:07:46.618 -> 0, 0, 255, 10, 35, 8, 255, 0, 19:07:46.618 -> READ CAN SLOT: 7 19:07:46.618 -> READ CAN lastReceivedPart: 1 19:07:46.618 -> READ CAN packet received 19:07:46.618 -> transport receive called 19:07:46.618 -> transport receive data: 0, 0, 255, 10, 35, 8, 255, 0, 19:07:46.651 -> 1142 TSF:MSG:READ,0-0-255,s=255,c=3,t=8,pt=1,l=1,sg=0:0 19:07:46.651 -> 1153 TSF:MSG:FPAR OK,ID=0,D=1 19:07:47.579 -> 2094 TSM:FPAR:OK 19:07:47.579 -> 2095 TSM:ID 19:07:47.579 -> 2096 TSM:ID:REQ 19:07:47.579 -> send partLen: 7 19:07:47.579 -> send data: 255;255;0;2;3;3;48;. 19:07:47.579 -> send CAN len: 7 19:07:47.579 -> send CAN noOfFrames: 1 19:07:47.612 -> send CAN id: 2148532224 19:07:47.612 -> send packet sent 19:07:47.612 -> 2103 TSF:MSG:SEND,255-255-0-0,s=48,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:07:49.601 -> 4116 TSM:ID 19:07:49.601 -> 4117 TSM:ID:REQ 19:07:49.601 -> send partLen: 7 19:07:49.601 -> send data: 255;255;0;2;3;3;21;. 19:07:49.601 -> send CAN len: 7 19:07:49.601 -> send CAN noOfFrames: 1 19:07:49.601 -> send CAN id: 2148532224 19:07:49.635 -> send packet sent 19:07:49.635 -> 4124 TSF:MSG:SEND,255-255-0-0,s=21,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:07:51.624 -> 6136 TSM:ID 19:07:51.624 -> 6137 TSM:ID:REQ 19:07:51.624 -> send partLen: 7 19:07:51.624 -> send data: 255;255;0;2;3;3;249;. 19:07:51.624 -> send CAN len: 7 19:07:51.624 -> send CAN noOfFrames: 1 19:07:51.624 -> send CAN id: 2148532224 19:07:51.657 -> send packet sent 19:07:51.657 -> 6145 TSF:MSG:SEND,255-255-0-0,s=249,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:07:53.646 -> 8157 TSM:ID 19:07:53.646 -> 8158 TSM:ID:REQ 19:07:53.646 -> send partLen: 7 19:07:53.646 -> send data: 255;255;0;2;3;3;222;. 19:07:53.646 -> send CAN len: 7 19:07:53.646 -> send CAN noOfFrames: 1 19:07:53.646 -> send CAN id: 2148532224 19:07:53.646 -> send packet sent 19:07:53.679 -> 8165 TSF:MSG:SEND,255-255-0-0,s=222,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:07:55.668 -> 10177 !TSM:ID:FAIL 19:07:55.668 -> 10178 TSM:FAIL:CNT=1 19:07:55.668 -> 10180 TSM:FAIL:DIS 19:07:55.668 -> 10182 TSF:TDI:TSL 19:08:05.680 -> 20185 TSM:FAIL:RE-INIT 19:08:05.680 -> 20187 TSM:INIT 19:08:05.680 -> Entering Configuration Mode Successful! 19:08:05.680 -> Setting Baudrate Successful! 19:08:05.680 -> Starting to Set Mask! 19:08:05.680 -> Setting Mask Successful! 19:08:05.680 -> Starting to Set Filter! 19:08:05.680 -> Setting Filter Successfull! 19:08:05.713 -> Starting to Set Filter! 19:08:05.713 -> Setting Filter Successfull! 19:08:05.713 -> Starting to Set Mask! 19:08:05.713 -> Setting Mask Successful! 19:08:05.713 -> Starting to Set Filter! 19:08:05.713 -> Setting Filter Successfull! 19:08:05.713 -> Starting to Set Filter! 19:08:05.713 -> Setting Filter Successfull! 19:08:05.713 -> Starting to Set Filter! 19:08:05.713 -> Setting Filter Successfull! 19:08:05.713 -> Starting to Set Filter! 19:08:05.713 -> Setting Filter Successfull! 19:08:05.713 -> 20225 TSM:INIT:TSP OK 19:08:05.713 -> 20232 TSM:FPAR 19:08:05.713 -> send partLen: 7 19:08:05.746 -> send data: 255;255;255;2;3;7;255;. 19:08:05.746 -> send CAN len: 7 19:08:05.746 -> send CAN noOfFrames: 1 19:08:05.746 -> send CAN id: 2148597504 19:08:05.746 -> send packet sent 19:08:05.746 -> 20239 ?TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:06.409 -> READ CAN id: 2148597504 19:08:06.409 -> READ CAN from: 0 19:08:06.409 -> READ CAN to: 255 19:08:06.409 -> READ CAN currentPart: 0 19:08:06.409 -> READ CAN totalPartCount: 1 19:08:06.409 -> READ CAN messageId: 0 19:08:06.409 -> READ CAN data: 19:08:06.409 -> 0, 0, 255, 10, 35, 8, 255, 0, 19:08:06.409 -> READ CAN SLOT: 7 19:08:06.409 -> READ CAN lastReceivedPart: 1 19:08:06.409 -> READ CAN packet received 19:08:06.409 -> transport receive called 19:08:06.409 -> transport receive data: 0, 0, 255, 10, 35, 8, 255, 0, 19:08:06.409 -> 20921 TSF:MSG:READ,0-0-255,s=255,c=3,t=8,pt=1,l=1,sg=0:0 19:08:06.442 -> 20931 TSF:MSG:FPAR OK,ID=0,D=1 19:08:07.735 -> 22252 TSM:FPAR:OK 19:08:07.735 -> 22253 TSM:ID 19:08:07.735 -> 22254 TSM:ID:REQ 19:08:07.768 -> send partLen: 7 19:08:07.768 -> send data: 255;255;0;2;3;3;238;. 19:08:07.768 -> send CAN len: 7 19:08:07.768 -> send CAN noOfFrames: 1 19:08:07.768 -> send CAN id: 2148532224 19:08:07.768 -> send packet sent 19:08:07.768 -> 22262 TSF:MSG:SEND,255-255-0-0,s=238,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:09.758 -> 24275 TSM:ID 19:08:09.758 -> 24276 TSM:ID:REQ 19:08:09.758 -> send partLen: 7 19:08:09.791 -> send data: 255;255;0;2;3;3;212;. 19:08:09.791 -> send CAN len: 7 19:08:09.791 -> send CAN noOfFrames: 1 19:08:09.791 -> send CAN id: 2148532224 19:08:09.791 -> send packet sent 19:08:09.791 -> 24284 TSF:MSG:SEND,255-255-0-0,s=212,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:11.779 -> 26296 TSM:ID 19:08:11.779 -> 26297 TSM:ID:REQ 19:08:11.779 -> send partLen: 7 19:08:11.812 -> send data: 255;255;0;2;3;3;185;. 19:08:11.812 -> send CAN len: 7 19:08:11.812 -> send CAN noOfFrames: 1 19:08:11.812 -> send CAN id: 2148532224 19:08:11.812 -> send packet sent 19:08:11.812 -> 26304 TSF:MSG:SEND,255-255-0-0,s=185,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:13.801 -> 28316 TSM:ID 19:08:13.801 -> 28317 TSM:ID:REQ 19:08:13.801 -> send partLen: 7 19:08:13.834 -> send data: 255;255;0;2;3;3;157;. 19:08:13.834 -> send CAN len: 7 19:08:13.834 -> send CAN noOfFrames: 1 19:08:13.834 -> send CAN id: 2148532224 19:08:13.834 -> send packet sent 19:08:13.834 -> 28324 TSF:MSG:SEND,255-255-0-0,s=157,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:15.823 -> 30337 !TSM:ID:FAIL 19:08:15.823 -> 30338 TSM:FAIL:CNT=2 19:08:15.823 -> 30340 TSM:FAIL:DIS 19:08:15.823 -> 30342 TSF:TDI:TSL 19:08:25.834 -> 40345 TSM:FAIL:RE-INIT 19:08:25.834 -> 40347 TSM:INIT 19:08:25.834 -> Entering Configuration Mode Successful! 19:08:25.867 -> Setting Baudrate Successful! 19:08:25.867 -> Starting to Set Mask! 19:08:25.867 -> Setting Mask Successful! 19:08:25.867 -> Starting to Set Filter! 19:08:25.867 -> Setting Filter Successfull! 19:08:25.867 -> Starting to Set Filter! 19:08:25.867 -> Setting Filter Successfull! 19:08:25.867 -> Starting to Set Mask! 19:08:25.867 -> Setting Mask Successful! 19:08:25.867 -> Starting to Set Filter! 19:08:25.867 -> Setting Filter Successfull! 19:08:25.867 -> Starting to Set Filter! 19:08:25.867 -> Setting Filter Successfull! 19:08:25.867 -> Starting to Set Filter! 19:08:25.900 -> Setting Filter Successfull! 19:08:25.900 -> Starting to Set Filter! 19:08:25.900 -> Setting Filter Successfull! 19:08:25.900 -> 40385 TSM:INIT:TSP OK 19:08:25.900 -> 40392 TSM:FPAR 19:08:25.900 -> send partLen: 7 19:08:25.900 -> send data: 255;255;255;2;3;7;255;. 19:08:25.900 -> send CAN len: 7 19:08:25.900 -> send CAN noOfFrames: 1 19:08:25.900 -> send CAN id: 2148597504 19:08:25.900 -> send packet sent 19:08:25.900 -> 40399 ?TSF:MSG:SEND,255-255-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:26.165 -> READ CAN id: 2148597504 19:08:26.165 -> READ CAN from: 0 19:08:26.198 -> READ CAN to: 255 19:08:26.198 -> READ CAN currentPart: 0 19:08:26.198 -> READ CAN totalPartCount: 1 19:08:26.198 -> READ CAN messageId: 0 19:08:26.198 -> READ CAN data: 19:08:26.198 -> 0, 0, 255, 10, 35, 8, 255, 0, 19:08:26.198 -> READ CAN SLOT: 7 19:08:26.198 -> READ CAN lastReceivedPart: 1 19:08:26.198 -> READ CAN packet received 19:08:26.198 -> transport receive called 19:08:26.198 -> transport receive data: 0, 0, 255, 10, 35, 8, 255, 0, 19:08:26.198 -> 40702 TSF:MSG:READ,0-0-255,s=255,c=3,t=8,pt=1,l=1,sg=0:0 19:08:26.198 -> 40713 TSF:MSG:FPAR OK,ID=0,D=1 19:08:27.923 -> 42413 TSM:FPAR:OK 19:08:27.923 -> 42414 TSM:ID 19:08:27.923 -> 42415 TSM:ID:REQ 19:08:27.923 -> send partLen: 7 19:08:27.923 -> send data: 255;255;0;2;3;3;175;. 19:08:27.923 -> send CAN len: 7 19:08:27.923 -> send CAN noOfFrames: 1 19:08:27.923 -> send CAN id: 2148532224 19:08:27.923 -> send packet sent 19:08:27.923 -> 42423 TSF:MSG:SEND,255-255-0-0,s=175,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:29.945 -> 44435 TSM:ID 19:08:29.945 -> 44436 TSM:ID:REQ 19:08:29.945 -> send partLen: 7 19:08:29.945 -> send data: 255;255;0;2;3;3;148;. 19:08:29.945 -> send CAN len: 7 19:08:29.945 -> send CAN noOfFrames: 1 19:08:29.945 -> send CAN id: 2148532224 19:08:29.945 -> send packet sent 19:08:29.945 -> 44443 TSF:MSG:SEND,255-255-0-0,s=148,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:31.967 -> 46455 TSM:ID 19:08:31.967 -> 46456 TSM:ID:REQ 19:08:31.967 -> send partLen: 7 19:08:31.967 -> send data: 255;255;0;2;3;3;120;. 19:08:31.967 -> send CAN len: 7 19:08:31.967 -> send CAN noOfFrames: 1 19:08:31.967 -> send CAN id: 2148532224 19:08:31.967 -> send packet sent 19:08:31.967 -> 46464 TSF:MSG:SEND,255-255-0-0,s=120,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:33.989 -> 48476 TSM:ID 19:08:33.989 -> 48477 TSM:ID:REQ 19:08:33.989 -> send partLen: 7 19:08:33.989 -> send data: 255;255;0;2;3;3;93;. 19:08:33.989 -> send CAN len: 7 19:08:33.989 -> send CAN noOfFrames: 1 19:08:33.989 -> send CAN id: 2148532224 19:08:33.989 -> send packet sent 19:08:33.989 -> 48484 TSF:MSG:SEND,255-255-0-0,s=93,c=3,t=3,pt=0,l=0,sg=0,ft=0,st=OK: 19:08:36.012 -> 50496 !TSM:ID:FAIL 19:08:36.012 -> 50497 TSM:FAIL:CNT=3 19:08:36.012 -> 50499 TSM:FAIL:DIS 19:08:36.012 -> 50501 TSF:TDI:TSL 19:08:45.992 -> 60504 TSM:FAIL:RE-INIT 19:08:45.992 -> 60506 TSM:INIT
-
After setting node id, My examples works.
Sensor restarts communication once at startup, and then it looks ok. Logs below.
That's it for today.
Any suggestion what to test next?
Any ideas why communication restarts at startup?logs trimmed due to max post length.
gateway:
20:30:00.383 -> 0;255;3;0;14;Gateway startup complete. 20:30:00.383 -> 0;255;0;0;18;2.4.0-alpha 20:30:00.383 -> send partLen: 7 20:30:00.383 -> send data: 0;0;255;2;3;20;255;. 20:30:00.383 -> send CAN len: 7 20:30:00.383 -> send CAN noOfFrames: 1 20:30:00.383 -> send CAN id: 2148597504 20:30:00.383 -> send packet sent 20:30:07.317 -> READ CAN id: 2148597517 20:30:07.317 -> READ CAN from: 13 20:30:07.317 -> READ CAN to: 255 20:30:07.317 -> READ CAN currentPart: 0 20:30:07.317 -> READ CAN totalPartCount: 1 20:30:07.317 -> READ CAN messageId: 0 20:30:07.350 -> READ CAN data: 20:30:07.350 -> 13, 13, 255, 2, 3, 7, 255, 20:30:07.350 -> READ CAN SLOT: 7 20:30:07.350 -> READ CAN lastReceivedPart: 1 20:30:07.350 -> READ CAN packet received 20:30:07.350 -> transport receive called 20:30:07.350 -> transport receive data: 13, 13, 255, 2, 3, 7, 255, 20:30:08.213 -> send partLen: 8 20:30:08.213 -> send data: 0;0;13;10;35;8;255;0;. 20:30:08.213 -> send CAN len: 8 20:30:08.213 -> send CAN noOfFrames: 1 20:30:08.213 -> send CAN id: 2148535552 20:30:08.213 -> send packet sent 20:30:09.340 -> READ CAN id: 2148597517 20:30:09.340 -> READ CAN from: 13 20:30:09.340 -> READ CAN to: 255 20:30:09.340 -> READ CAN currentPart: 0 20:30:09.340 -> READ CAN totalPartCount: 1 20:30:09.373 -> READ CAN messageId: 0 20:30:09.373 -> READ CAN data: 20:30:09.373 -> 13, 13, 255, 2, 3, 7, 255, 20:30:09.373 -> READ CAN SLOT: 7 20:30:09.373 -> READ CAN lastReceivedPart: 1 20:30:09.373 -> READ CAN packet received 20:30:09.373 -> transport receive called 20:30:09.373 -> transport receive data: 13, 13, 255, 2, 3, 7, 255, 20:30:10.202 -> send partLen: 8 20:30:10.202 -> send data: 0;0;13;10;35;8;255;0;. 20:30:10.202 -> send CAN len: 8 20:30:10.202 -> send CAN noOfFrames: 1 20:30:10.202 -> send CAN id: 2148535552 20:30:10.202 -> send packet sent 20:30:11.362 -> READ CAN id: 2148597517 20:30:11.362 -> READ CAN from: 13 20:30:11.362 -> READ CAN to: 255 20:30:11.362 -> READ CAN currentPart: 0 20:30:11.362 -> READ CAN totalPartCount: 1 20:30:11.395 -> READ CAN messageId: 0 20:30:11.395 -> READ CAN data: 20:30:11.395 -> 13, 13, 255, 2, 3, 7, 255, 20:30:11.395 -> READ CAN SLOT: 7 20:30:11.395 -> READ CAN lastReceivedPart: 1 20:30:11.395 -> READ CAN packet received 20:30:11.395 -> transport receive called 20:30:11.395 -> transport receive data: 13, 13, 255, 2, 3, 7, 255, 20:30:12.191 -> send partLen: 8 20:30:12.191 -> send data: 0;0;13;10;35;8;255;0;. 20:30:12.191 -> send CAN len: 8 20:30:12.191 -> send CAN noOfFrames: 1 20:30:12.191 -> send CAN id: 2148535552 20:30:12.191 -> send packet sent 20:30:13.384 -> READ CAN id: 2148597517 20:30:13.384 -> READ CAN from: 13 20:30:13.384 -> READ CAN to: 255 20:30:13.384 -> READ CAN currentPart: 0 20:30:13.384 -> READ CAN totalPartCount: 1 20:30:13.384 -> READ CAN messageId: 0 20:30:13.417 -> READ CAN data: 20:30:13.417 -> 13, 13, 255, 2, 3, 7, 255, 20:30:13.417 -> READ CAN SLOT: 7 20:30:13.417 -> READ CAN lastReceivedPart: 1 20:30:13.417 -> READ CAN packet received 20:30:13.417 -> transport receive called 20:30:13.417 -> transport receive data: 13, 13, 255, 2, 3, 7, 255, 20:30:14.179 -> send partLen: 8 20:30:14.179 -> send data: 0;0;13;10;35;8;255;0;. 20:30:14.179 -> send CAN len: 8 20:30:14.179 -> send CAN noOfFrames: 1 20:30:14.179 -> send CAN id: 2148535552 20:30:14.179 -> send packet sent 20:30:25.460 -> READ CAN id: 2148597517 20:30:25.493 -> READ CAN from: 13 20:30:25.493 -> READ CAN to: 255 20:30:25.493 -> READ CAN currentPart: 0 20:30:25.493 -> READ CAN totalPartCount: 1 20:30:25.493 -> READ CAN messageId: 0 20:30:25.493 -> READ CAN data: 20:30:25.493 -> 13, 13, 255, 2, 3, 7, 255, 20:30:25.493 -> READ CAN SLOT: 7 20:30:25.493 -> READ CAN lastReceivedPart: 1 20:30:25.493 -> READ CAN packet received 20:30:25.493 -> transport receive called 20:30:25.493 -> transport receive data: 13, 13, 255, 2, 3, 7, 255, 20:30:25.991 -> send partLen: 8 20:30:26.024 -> send data: 0;0;13;10;35;8;255;0;. 20:30:26.024 -> send CAN len: 8 20:30:26.024 -> send CAN noOfFrames: 1 20:30:26.024 -> send CAN id: 2148535552 20:30:26.024 -> send packet sent 20:30:27.483 -> READ CAN id: 2148532237 20:30:27.516 -> READ CAN from: 13 20:30:27.516 -> READ CAN to: 0 20:30:27.516 -> READ CAN currentPart: 0 20:30:27.516 -> READ CAN totalPartCount: 1 20:30:27.516 -> READ CAN messageId: 0 20:30:27.516 -> READ CAN data: 20:30:27.516 -> 13, 13, 0, 10, 35, 24, 255, 1, 20:30:27.516 -> READ CAN SLOT: 7 20:30:27.516 -> READ CAN lastReceivedPart: 1 20:30:27.516 -> READ CAN packet received 20:30:27.516 -> transport receive called 20:30:27.516 -> transport receive data: 13, 13, 0, 10, 35, 24, 255, 1, 20:30:27.516 -> send partLen: 8 20:30:27.516 -> send data: 0;0;13;10;35;25;255;1;. 20:30:27.549 -> send CAN len: 8 20:30:27.549 -> send CAN noOfFrames: 1 20:30:27.549 -> send CAN id: 2148535552 20:30:27.549 -> send packet sent 20:30:27.582 -> READ CAN id: 2149580813 20:30:27.582 -> READ CAN from: 13 20:30:27.582 -> READ CAN to: 0 20:30:27.582 -> READ CAN currentPart: 0 20:30:27.582 -> READ CAN totalPartCount: 2 20:30:27.582 -> READ CAN messageId: 0 20:30:27.582 -> READ CAN data: 20:30:27.582 -> 13, 13, 0, 18, 195, 15, 255, 1, 20:30:27.582 -> READ CAN SLOT: 7 20:30:27.616 -> READ CAN lastReceivedPart: 1 20:30:29.606 -> READ CAN id: 2150629389 20:30:29.606 -> READ CAN from: 13 20:30:29.606 -> READ CAN to: 0 20:30:29.606 -> READ CAN currentPart: 0 20:30:29.606 -> READ CAN totalPartCount: 3 20:30:29.606 -> READ CAN messageId: 0 20:30:29.606 -> READ CAN data: 20:30:29.606 -> 13, 13, 0, 90, 0, 17, 255, 50, 20:30:29.606 -> READ CAN SLOT: 6 20:30:29.606 -> READ CAN lastReceivedPart: 1 20:30:29.606 -> READ CAN id: 2148532237 20:30:29.606 -> READ CAN from: 13 20:30:29.639 -> READ CAN to: 0 20:30:29.639 -> READ CAN currentPart: 0 20:30:29.639 -> READ CAN totalPartCount: 1 20:30:29.639 -> READ CAN messageId: 0 20:30:29.639 -> READ CAN data: 20:30:29.639 -> 13, 13, 0, 10, 35, 6, 255, 0, 20:30:29.639 -> READ CAN SLOT: 5 20:30:29.639 -> READ CAN lastReceivedPart: 1 20:30:29.639 -> READ CAN packet received 20:30:29.639 -> transport receive called 20:30:29.639 -> transport receive data: 13, 13, 0, 10, 35, 6, 255, 0, 20:30:29.639 -> 13;255;3;0;6;0 20:30:31.628 -> READ CAN id: 2150629389 20:30:31.628 -> READ CAN from: 13 20:30:31.628 -> READ CAN to: 0 20:30:31.628 -> READ CAN currentPart: 0 20:30:31.628 -> READ CAN totalPartCount: 3 20:30:31.628 -> READ CAN messageId: 0 20:30:31.664 -> READ CAN data: 20:30:31.664 -> 13, 13, 0, 106, 3, 11, 255, 66, 20:30:31.664 -> READ CAN SLOT: 5 20:30:31.664 -> READ CAN lastReceivedPart: 1 20:30:31.664 -> READ CAN id: 2149580813 20:30:31.664 -> READ CAN from: 13 20:30:31.664 -> READ CAN to: 0 20:30:31.664 -> READ CAN currentPart: 0 20:30:31.664 -> READ CAN totalPartCount: 2 20:30:31.664 -> READ CAN messageId: 0 20:30:31.664 -> READ CAN data: 20:30:31.664 -> 13, 13, 0, 26, 3, 12, 255, 49, 20:30:31.664 -> READ CAN SLOT: 4 20:30:31.664 -> READ CAN lastReceivedPart: 1 20:30:31.664 -> READ CAN id: 2148532237 20:30:31.664 -> READ CAN from: 13 20:30:31.664 -> READ CAN to: 0 20:30:31.664 -> READ CAN currentPart: 0 20:30:31.694 -> READ CAN totalPartCount: 1 20:30:31.694 -> READ CAN messageId: 0 20:30:31.694 -> READ CAN data: 20:30:31.694 -> 13, 13, 0, 2, 0, 0, 4, 20:30:31.694 -> READ CAN SLOT: 3 20:30:31.694 -> READ CAN lastReceivedPart: 1 20:30:31.694 -> READ CAN packet received 20:30:31.694 -> transport receive called 20:30:31.694 -> transport receive data: 13, 13, 0, 2, 0, 0, 4, 20:30:31.694 -> 13;4;0;0;0; 20:30:31.694 -> READ CAN id: 2148532237 20:30:31.694 -> READ CAN from: 13 20:30:31.694 -> READ CAN to: 0 20:30:31.694 -> READ CAN currentPart: 0 20:30:31.727 -> READ CAN totalPartCount: 1 20:30:31.727 -> READ CAN messageId: 0 20:30:31.727 -> READ CAN data: 20:30:31.727 -> 13, 13, 0, 10, 35, 26, 255, 2, 20:30:31.727 -> READ CAN SLOT: 3 20:30:31.727 -> READ CAN lastReceivedPart: 1 20:30:31.727 -> READ CAN packet received 20:30:31.727 -> transport receive called 20:30:31.727 -> transport receive data: 13, 13, 0, 10, 35, 26, 255, 2, 20:30:31.727 -> send partLen: 8 20:30:31.727 -> send data: 0;0;13;10;35;27;255;1;. 20:30:31.727 -> send CAN len: 8 20:30:31.727 -> send CAN noOfFrames: 1 20:30:31.727 -> send CAN id: 2148535552 20:30:31.727 -> send packet sent 20:30:31.827 -> READ CAN id: 2148532237 20:30:31.827 -> READ CAN from: 13 20:30:31.827 -> READ CAN to: 0 20:30:31.827 -> READ CAN currentPart: 0 20:30:31.827 -> READ CAN totalPartCount: 1 20:30:31.827 -> READ CAN messageId: 0 20:30:31.827 -> READ CAN data: 20:30:31.827 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:30:31.827 -> READ CAN SLOT: 3 20:30:31.827 -> READ CAN lastReceivedPart: 1 20:30:31.827 -> READ CAN packet received 20:30:31.827 -> transport receive called 20:30:31.827 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:30:31.827 -> 13;4;1;0;16;1 20:30:58.571 -> READ CAN id: 2148532237 20:30:58.571 -> READ CAN from: 13 20:30:58.571 -> READ CAN to: 0 20:30:58.571 -> READ CAN currentPart: 0 20:30:58.571 -> READ CAN totalPartCount: 1 20:30:58.571 -> READ CAN messageId: 0 20:30:58.571 -> READ CAN data: 20:30:58.571 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:30:58.571 -> READ CAN SLOT: 3 20:30:58.571 -> READ CAN lastReceivedPart: 1 20:30:58.571 -> READ CAN packet received 20:30:58.571 -> transport receive called 20:30:58.571 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:30:58.571 -> 13;4;1;0;16;0 20:30:58.736 -> READ CAN id: 2148532237 20:30:58.736 -> READ CAN from: 13 20:30:58.736 -> READ CAN to: 0 20:30:58.736 -> READ CAN currentPart: 0 20:30:58.736 -> READ CAN totalPartCount: 1 20:30:58.736 -> READ CAN messageId: 0 20:30:58.736 -> READ CAN data: 20:30:58.736 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:30:58.770 -> READ CAN SLOT: 3 20:30:58.770 -> READ CAN lastReceivedPart: 1 20:30:58.770 -> READ CAN packet received 20:30:58.770 -> transport receive called 20:30:58.770 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:30:58.770 -> 13;4;1;0;16;1 20:31:00.062 -> READ CAN id: 2148532237 20:31:00.062 -> READ CAN from: 13 20:31:00.062 -> READ CAN to: 0 20:31:00.062 -> READ CAN currentPart: 0 20:31:00.062 -> READ CAN totalPartCount: 1 20:31:00.062 -> READ CAN messageId: 0 20:31:00.062 -> READ CAN data: 20:31:00.062 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:31:00.062 -> READ CAN SLOT: 3 20:31:00.062 -> READ CAN lastReceivedPart: 1 20:31:00.062 -> READ CAN packet received 20:31:00.062 -> transport receive called 20:31:00.095 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:31:00.095 -> 13;4;1;0;16;0 20:31:01.521 -> READ CAN id: 2148532237 20:31:01.521 -> READ CAN from: 13 20:31:01.521 -> READ CAN to: 0 20:31:01.521 -> READ CAN currentPart: 0 20:31:01.521 -> READ CAN totalPartCount: 1 20:31:01.521 -> READ CAN messageId: 0 20:31:01.521 -> READ CAN data: 20:31:01.521 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:31:01.521 -> READ CAN SLOT: 3 20:31:01.521 -> READ CAN lastReceivedPart: 1 20:31:01.521 -> READ CAN packet received 20:31:01.521 -> transport receive called 20:31:01.521 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:31:01.521 -> 13;4;1;0;16;1 20:31:02.913 -> READ CAN id: 2148532237 20:31:02.913 -> READ CAN from: 13 20:31:02.913 -> READ CAN to: 0 20:31:02.913 -> READ CAN currentPart: 0 20:31:02.913 -> READ CAN totalPartCount: 1 20:31:02.913 -> READ CAN messageId: 0 20:31:02.913 -> READ CAN data: 20:31:02.913 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:31:02.913 -> READ CAN SLOT: 3 20:31:02.913 -> READ CAN lastReceivedPart: 1 20:31:02.946 -> READ CAN packet received 20:31:02.946 -> transport receive called 20:31:02.946 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:31:02.946 -> 13;4;1;0;16;0 20:31:03.775 -> READ CAN id: 2148532237 20:31:03.775 -> READ CAN from: 13 20:31:03.775 -> READ CAN to: 0 20:31:03.775 -> READ CAN currentPart: 0 20:31:03.775 -> READ CAN totalPartCount: 1 20:31:03.775 -> READ CAN messageId: 0 20:31:03.775 -> READ CAN data: 20:31:03.775 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:31:03.775 -> READ CAN SLOT: 3 20:31:03.775 -> READ CAN lastReceivedPart: 1 20:31:03.775 -> READ CAN packet received 20:31:03.808 -> transport receive called 20:31:03.808 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:31:03.808 -> 13;4;1;0;16;1 20:31:05.399 -> READ CAN id: 2148532237 20:31:05.433 -> READ CAN from: 13 20:31:05.433 -> READ CAN to: 0 20:31:05.433 -> READ CAN currentPart: 0 20:31:05.433 -> READ CAN totalPartCount: 1 20:31:05.433 -> READ CAN messageId: 0 20:31:05.433 -> READ CAN data: 20:31:05.433 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:31:05.433 -> READ CAN SLOT: 3 20:31:05.433 -> READ CAN lastReceivedPart: 1 20:31:05.433 -> READ CAN packet received 20:31:05.433 -> transport receive called 20:31:05.433 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:31:05.433 -> 13;4;1;0;16;0 20:31:05.565 -> READ CAN id: 2148532237 20:31:05.565 -> READ CAN from: 13 20:31:05.565 -> READ CAN to: 0 20:31:05.565 -> READ CAN currentPart: 0 20:31:05.565 -> READ CAN totalPartCount: 1 20:31:05.565 -> READ CAN messageId: 0 20:31:05.565 -> READ CAN data: 20:31:05.565 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:31:05.565 -> READ CAN SLOT: 3 20:31:05.565 -> READ CAN lastReceivedPart: 1 20:31:05.565 -> READ CAN packet received 20:31:05.565 -> transport receive called 20:31:05.565 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:31:05.598 -> 13;4;1;0;16;1 20:31:05.864 -> READ CAN id: 2148532237 20:31:05.897 -> READ CAN from: 13 20:31:05.897 -> READ CAN to: 0 20:31:05.897 -> READ CAN currentPart: 0 20:31:05.897 -> READ CAN totalPartCount: 1 20:31:05.897 -> READ CAN messageId: 0 20:31:05.897 -> READ CAN data: 20:31:05.897 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:31:05.897 -> READ CAN SLOT: 3 20:31:05.897 -> READ CAN lastReceivedPart: 1 20:31:05.897 -> READ CAN packet received 20:31:05.897 -> transport receive called 20:31:05.897 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:31:05.897 -> 13;4;1;0;16;0 20:31:05.996 -> READ CAN id: 2148532237 20:31:05.996 -> READ CAN from: 13 20:31:05.996 -> READ CAN to: 0 20:31:05.996 -> READ CAN currentPart: 0 20:31:05.996 -> READ CAN totalPartCount: 1 20:31:05.996 -> READ CAN messageId: 0 20:31:05.996 -> READ CAN data: 20:31:05.996 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:31:06.029 -> READ CAN SLOT: 3 20:31:06.029 -> READ CAN lastReceivedPart: 1 20:31:06.029 -> READ CAN packet received 20:31:06.029 -> transport receive called 20:31:06.029 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:31:06.029 -> 13;4;1;0;16;1 20:31:06.560 -> READ CAN id: 2148532237 20:31:06.560 -> READ CAN from: 13 20:31:06.560 -> READ CAN to: 0 20:31:06.560 -> READ CAN currentPart: 0 20:31:06.560 -> READ CAN totalPartCount: 1 20:31:06.560 -> READ CAN messageId: 0 20:31:06.560 -> READ CAN data: 20:31:06.560 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:31:06.560 -> READ CAN SLOT: 3 20:31:06.560 -> READ CAN lastReceivedPart: 1 20:31:06.560 -> READ CAN packet received 20:31:06.560 -> transport receive called 20:31:06.560 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:31:06.560 -> 13;4;1;0;16;0 20:31:07.024 -> READ CAN id: 2148532237 20:31:07.024 -> READ CAN from: 13 20:31:07.024 -> READ CAN to: 0 20:31:07.024 -> READ CAN currentPart: 0 20:31:07.024 -> READ CAN totalPartCount: 1 20:31:07.024 -> READ CAN messageId: 0 20:31:07.024 -> READ CAN data: 20:31:07.024 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:31:07.024 -> READ CAN SLOT: 3 20:31:07.024 -> READ CAN lastReceivedPart: 1 20:31:07.024 -> READ CAN packet received 20:31:07.024 -> transport receive called 20:31:07.057 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:31:07.057 -> 13;4;1;0;16;1 20:31:07.554 -> READ CAN id: 2148532237 20:31:07.554 -> READ CAN from: 13 20:31:07.554 -> READ CAN to: 0 20:31:07.587 -> READ CAN currentPart: 0 20:31:07.587 -> READ CAN totalPartCount: 1 20:31:07.587 -> READ CAN messageId: 0 20:31:07.587 -> READ CAN data: 20:31:07.587 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:31:07.587 -> READ CAN SLOT: 3 20:31:07.587 -> READ CAN lastReceivedPart: 1 20:31:07.587 -> READ CAN packet received 20:31:07.587 -> transport receive called 20:31:07.587 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:31:07.587 -> 13;4;1;0;16;0 20:31:07.654 -> READ CAN id: 2148532237 20:31:07.687 -> READ CAN from: 13 20:31:07.687 -> READ CAN to: 0 20:31:07.687 -> READ CAN currentPart: 0 20:31:07.687 -> READ CAN totalPartCount: 1 20:31:07.687 -> READ CAN messageId: 0 20:31:07.687 -> READ CAN data: 20:31:07.687 -> 13, 13, 0, 10, 33, 16, 4, 1, 20:31:07.687 -> READ CAN SLOT: 3 20:31:07.687 -> READ CAN lastReceivedPart: 1 20:31:07.687 -> READ CAN packet received 20:31:07.687 -> transport receive called 20:31:07.687 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 1, 20:31:07.687 -> 13;4;1;0;16;1 20:31:07.919 -> READ CAN id: 2148532237 20:31:07.919 -> READ CAN from: 13 20:31:07.919 -> READ CAN to: 0 20:31:07.919 -> READ CAN currentPart: 0 20:31:07.919 -> READ CAN totalPartCount: 1 20:31:07.919 -> READ CAN messageId: 0 20:31:07.919 -> READ CAN data: 20:31:07.919 -> 13, 13, 0, 10, 33, 16, 4, 0, 20:31:07.919 -> READ CAN SLOT: 3 20:31:07.919 -> READ CAN lastReceivedPart: 1 20:31:07.919 -> READ CAN packet received 20:31:07.919 -> transport receive called 20:31:07.919 -> transport receive data: 13, 13, 0, 10, 33, 16, 4, 0, 20:31:07.952 -> 13;4;1;0;16;0sensor
20:30:07.251 -> 20:30:07.251 -> __ __ ____ 20:30:07.251 -> | \/ |_ _/ ___| ___ _ __ ___ ___ _ __ ___ 20:30:07.251 -> | |\/| | | | \___ \ / _ \ `_ \/ __|/ _ \| `__/ __| 20:30:07.251 -> | | | | |_| |___| | __/ | | \__ \ _ | | \__ \ 20:30:07.251 -> |_| |_|\__, |____/ \___|_| |_|___/\___/|_| |___/ 20:30:07.251 -> |___/ 2.4.0-alpha 20:30:07.251 -> 20:30:07.251 -> 17 MCO:BGN:INIT NODE,CP=RCNNA---,FQ=16,REL=0,VER=2.4.0-alpha 20:30:07.251 -> 27 TSM:INIT 20:30:07.251 -> 28 TSF:WUR:MS=0 20:30:07.284 -> Entering Configuration Mode Successful! 20:30:07.284 -> Setting Baudrate Successful! 20:30:07.284 -> Starting to Set Mask! 20:30:07.284 -> Setting Mask Successful! 20:30:07.284 -> Starting to Set Filter! 20:30:07.284 -> Setting Filter Successfull! 20:30:07.284 -> Starting to Set Filter! 20:30:07.284 -> Setting Filter Successfull! 20:30:07.284 -> Starting to Set Mask! 20:30:07.284 -> Setting Mask Successful! 20:30:07.284 -> Starting to Set Filter! 20:30:07.284 -> Setting Filter Successfull! 20:30:07.284 -> Starting to Set Filter! 20:30:07.284 -> Setting Filter Successfull! 20:30:07.317 -> Starting to Set Filter! 20:30:07.317 -> Setting Filter Successfull! 20:30:07.317 -> Starting to Set Filter! 20:30:07.317 -> Setting Filter Successfull! 20:30:07.317 -> 66 TSM:INIT:TSP OK 20:30:07.317 -> 73 TSM:INIT:STATID=13 20:30:07.317 -> 75 TSF:SID:OK,ID=13 20:30:07.317 -> 77 TSM:FPAR 20:30:07.317 -> send partLen: 7 20:30:07.317 -> send data: 13;13;255;2;3;7;255;. 20:30:07.317 -> send CAN len: 7 20:30:07.317 -> send CAN noOfFrames: 1 20:30:07.317 -> send CAN id: 2148597517 20:30:07.317 -> send packet sent 20:30:07.317 -> 84 ?TSF:MSG:SEND,13-13-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 20:30:09.340 -> 2097 !TSM:FPAR:NO REPLY 20:30:09.340 -> 2099 TSM:FPAR 20:30:09.340 -> send partLen: 7 20:30:09.340 -> send data: 13;13;255;2;3;7;255;. 20:30:09.340 -> send CAN len: 7 20:30:09.340 -> send CAN noOfFrames: 1 20:30:09.340 -> send CAN id: 2148597517 20:30:09.340 -> send packet sent 20:30:09.340 -> 2106 ?TSF:MSG:SEND,13-13-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 20:30:11.362 -> 4118 !TSM:FPAR:NO REPLY 20:30:11.362 -> 4120 TSM:FPAR 20:30:11.362 -> send partLen: 7 20:30:11.362 -> send data: 13;13;255;2;3;7;255;. 20:30:11.362 -> send CAN len: 7 20:30:11.362 -> send CAN noOfFrames: 1 20:30:11.362 -> send CAN id: 2148597517 20:30:11.362 -> send packet sent 20:30:11.362 -> 4127 ?TSF:MSG:SEND,13-13-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 20:30:13.384 -> 6140 !TSM:FPAR:NO REPLY 20:30:13.384 -> 6142 TSM:FPAR 20:30:13.384 -> send partLen: 7 20:30:13.384 -> send data: 13;13;255;2;3;7;255;. 20:30:13.384 -> send CAN len: 7 20:30:13.384 -> send CAN noOfFrames: 1 20:30:13.384 -> send CAN id: 2148597517 20:30:13.384 -> send packet sent 20:30:13.384 -> 6150 ?TSF:MSG:SEND,13-13-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 20:30:15.406 -> 8162 !TSM:FPAR:FAIL 20:30:15.406 -> 8163 TSM:FAIL:CNT=1 20:30:15.406 -> 8165 TSM:FAIL:DIS 20:30:15.406 -> 8167 TSF:TDI:TSL 20:30:25.427 -> 18169 TSM:FAIL:RE-INIT 20:30:25.427 -> 18171 TSM:INIT 20:30:25.427 -> Entering Configuration Mode Successful! 20:30:25.427 -> Setting Baudrate Successful! 20:30:25.427 -> Starting to Set Mask! 20:30:25.427 -> Setting Mask Successful! 20:30:25.427 -> Starting to Set Filter! 20:30:25.427 -> Setting Filter Successfull! 20:30:25.427 -> Starting to Set Filter! 20:30:25.427 -> Setting Filter Successfull! 20:30:25.427 -> Starting to Set Mask! 20:30:25.427 -> Setting Mask Successful! 20:30:25.427 -> Starting to Set Filter! 20:30:25.460 -> Setting Filter Successfull! 20:30:25.460 -> Starting to Set Filter! 20:30:25.460 -> Setting Filter Successfull! 20:30:25.460 -> Starting to Set Filter! 20:30:25.460 -> Setting Filter Successfull! 20:30:25.460 -> Starting to Set Filter! 20:30:25.460 -> Setting Filter Successfull! 20:30:25.460 -> 18209 TSM:INIT:TSP OK 20:30:25.460 -> 18216 TSM:INIT:STATID=13 20:30:25.460 -> 18219 TSF:SID:OK,ID=13 20:30:25.460 -> 18221 TSM:FPAR 20:30:25.460 -> send partLen: 7 20:30:25.460 -> send data: 13;13;255;2;3;7;255;. 20:30:25.460 -> send CAN len: 7 20:30:25.460 -> send CAN noOfFrames: 1 20:30:25.493 -> send CAN id: 2148597517 20:30:25.493 -> send packet sent 20:30:25.493 -> 18229 ?TSF:MSG:SEND,13-13-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 20:30:26.024 -> READ CAN id: 2148535552 20:30:26.024 -> READ CAN from: 0 20:30:26.024 -> READ CAN to: 13 20:30:26.024 -> READ CAN currentPart: 0 20:30:26.024 -> READ CAN totalPartCount: 1 20:30:26.024 -> READ CAN messageId: 0 20:30:26.024 -> READ CAN data: 20:30:26.024 -> 0, 0, 13, 10, 35, 8, 255, 0, 20:30:26.024 -> READ CAN SLOT: 7 20:30:26.024 -> READ CAN lastReceivedPart: 1 20:30:26.024 -> READ CAN packet received 20:30:26.024 -> transport receive called 20:30:26.024 -> transport receive data: 0, 0, 13, 10, 35, 8, 255, 0, 20:30:26.061 -> 18790 TSF:MSG:READ,0-0-13,s=255,c=3,t=8,pt=1,l=1,sg=0:0 20:30:26.061 -> 18800 TSF:MSG:FPAR OK,ID=0,D=1 20:30:27.483 -> 20241 TSM:FPAR:OK 20:30:27.483 -> 20242 TSM:ID 20:30:27.483 -> 20244 TSM:ID:OK 20:30:27.483 -> 20245 TSM:UPL 20:30:27.483 -> send partLen: 8 20:30:27.483 -> send data: 13;13;0;10;35;24;255;1;. 20:30:27.483 -> send CAN len: 8 20:30:27.516 -> send CAN noOfFrames: 1 20:30:27.516 -> send CAN id: 2148532237 20:30:27.516 -> send packet sent 20:30:27.516 -> 20252 TSF:MSG:SEND,13-13-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=OK:1 20:30:27.549 -> READ CAN id: 2148535552 20:30:27.549 -> READ CAN from: 0 20:30:27.549 -> READ CAN to: 13 20:30:27.549 -> READ CAN currentPart: 0 20:30:27.549 -> READ CAN totalPartCount: 1 20:30:27.549 -> READ CAN messageId: 0 20:30:27.549 -> READ CAN data: 20:30:27.549 -> 0, 0, 13, 10, 35, 25, 255, 1, 20:30:27.549 -> READ CAN SLOT: 7 20:30:27.549 -> READ CAN lastReceivedPart: 1 20:30:27.549 -> READ CAN packet received 20:30:27.549 -> transport receive called 20:30:27.549 -> transport receive data: 0, 0, 13, 10, 35, 25, 255, 1, 20:30:27.549 -> 20310 TSF:MSG:READ,0-0-13,s=255,c=3,t=25,pt=1,l=1,sg=0:1 20:30:27.582 -> 20321 TSF:MSG:PONG RECV,HP=1 20:30:27.582 -> 20323 TSM:UPL:OK 20:30:27.582 -> 20325 TSM:READY:ID=13,PAR=0,DIS=1 20:30:27.582 -> send partLen: 8 20:30:27.582 -> send data: 13;13;0;18;195;15;255;1;. 20:30:27.582 -> send CAN len: 9 20:30:27.582 -> send CAN noOfFrames: 2 20:30:27.582 -> send CAN id: 2149580813 20:30:27.582 -> send packet sent 20:30:27.582 -> 20334 TSF:MSG:SEND,13-13-0-0,s=255,c=3,t=15,pt=6,l=2,sg=0,ft=0,st=OK:0100 20:30:29.606 -> send partLen: 8 20:30:29.606 -> send data: 13;13;0;90;0;17;255;50;. 20:30:29.606 -> send CAN len: 18 20:30:29.606 -> send CAN noOfFrames: 3 20:30:29.606 -> send CAN id: 2150629389 20:30:29.606 -> send packet sent 20:30:29.606 -> 22351 TSF:MSG:SEND,13-13-0-0,s=255,c=0,t=17,pt=0,l=11,sg=0,ft=0,st=OK:2.4.0-alpha 20:30:29.606 -> send partLen: 8 20:30:29.606 -> send data: 13;13;0;10;35;6;255;0;. 20:30:29.606 -> send CAN len: 8 20:30:29.606 -> send CAN noOfFrames: 1 20:30:29.606 -> send CAN id: 2148532237 20:30:29.606 -> send packet sent 20:30:29.639 -> 22370 TSF:MSG:SEND,13-13-0-0,s=255,c=3,t=6,pt=1,l=1,sg=0,ft=0,st=OK:0 20:30:31.628 -> send partLen: 8 20:30:31.628 -> send data: 13;13;0;106;3;11;255;66;. 20:30:31.628 -> send CAN len: 20 20:30:31.628 -> send CAN noOfFrames: 3 20:30:31.628 -> send CAN id: 2150629389 20:30:31.628 -> send packet sent 20:30:31.628 -> 24387 TSF:MSG:SEND,13-13-0-0,s=255,c=3,t=11,pt=0,l=13,sg=0,ft=0,st=OK:Binary Sensor 20:30:31.662 -> send partLen: 8 20:30:31.662 -> send data: 13;13;0;26;3;12;255;49;. 20:30:31.662 -> send CAN len: 10 20:30:31.662 -> send CAN noOfFrames: 2 20:30:31.662 -> send CAN id: 2149580813 20:30:31.662 -> send packet sent 20:30:31.662 -> 24406 TSF:MSG:SEND,13-13-0-0,s=255,c=3,t=12,pt=0,l=3,sg=0,ft=0,st=OK:1.0 20:30:31.662 -> send partLen: 7 20:30:31.662 -> send data: 13;13;0;2;0;0;4;. 20:30:31.662 -> send CAN len: 7 20:30:31.662 -> send CAN noOfFrames: 1 20:30:31.662 -> send CAN id: 2148532237 20:30:31.662 -> send packet sent 20:30:31.662 -> 24423 TSF:MSG:SEND,13-13-0-0,s=4,c=0,t=0,pt=0,l=0,sg=0,ft=0,st=OK: 20:30:31.694 -> 24434 MCO:REG:REQ 20:30:31.694 -> send partLen: 8 20:30:31.694 -> send data: 13;13;0;10;35;26;255;2;. 20:30:31.694 -> send CAN len: 8 20:30:31.694 -> send CAN noOfFrames: 1 20:30:31.694 -> send CAN id: 2148532237 20:30:31.694 -> send packet sent 20:30:31.694 -> 24442 TSF:MSG:SEND,13-13-0-0,s=255,c=3,t=26,pt=1,l=1,sg=0,ft=0,st=OK:2 20:30:31.727 -> READ CAN id: 2148535552 20:30:31.727 -> READ CAN from: 0 20:30:31.727 -> READ CAN to: 13 20:30:31.727 -> READ CAN currentPart: 0 20:30:31.760 -> READ CAN totalPartCount: 1 20:30:31.760 -> READ CAN messageId: 0 20:30:31.760 -> READ CAN data: 20:30:31.760 -> 0, 0, 13, 10, 35, 27, 255, 1, 20:30:31.760 -> READ CAN SLOT: 7 20:30:31.760 -> READ CAN lastReceivedPart: 1 20:30:31.760 -> READ CAN packet received 20:30:31.760 -> transport receive called 20:30:31.760 -> transport receive data: 0, 0, 13, 10, 35, 27, 255, 1, 20:30:31.760 -> 24513 TSF:MSG:READ,0-0-13,s=255,c=3,t=27,pt=1,l=1,sg=0:1 20:30:31.760 -> 24523 MCO:PIM:NODE REG=1 20:30:31.760 -> 24525 MCO:BGN:STP 20:30:31.760 -> 24527 MCO:BGN:INIT OK,TSP=1 20:30:31.794 -> 24529 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:30:31.794 -> 24535 TSF:TDI:TSL 20:30:31.794 -> 24537 MCO:SLP:WUP=-1 20:30:31.794 -> 24539 TSF:TRI:TSB 20:30:31.794 -> send partLen: 8 20:30:31.794 -> send data: 13;13;0;10;33;16;4;1;. 20:30:31.794 -> send CAN len: 8 20:30:31.827 -> send CAN noOfFrames: 1 20:30:31.827 -> send CAN id: 2148532237 20:30:31.827 -> send packet sent 20:30:31.827 -> 24546 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:1 20:30:31.827 -> 24557 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:30:31.827 -> 24562 TSF:TDI:TSL 20:30:58.538 -> 24563 MCO:SLP:WUP=1 20:30:58.538 -> 24565 TSF:TRI:TSB 20:30:58.538 -> 24567 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:30:58.538 -> 24572 TSF:TDI:TSL 20:30:58.538 -> 24573 MCO:SLP:WUP=-1 20:30:58.538 -> 24576 TSF:TRI:TSB 20:30:58.538 -> send partLen: 8 20:30:58.538 -> send data: 13;13;0;10;33;16;4;0;. 20:30:58.571 -> send CAN len: 8 20:30:58.571 -> send CAN noOfFrames: 1 20:30:58.571 -> send CAN id: 2148532237 20:30:58.571 -> send packet sent 20:30:58.571 -> 24584 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:0 20:30:58.571 -> 24595 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:30:58.571 -> 24599 TSF:TDI:TSL 20:30:58.703 -> 24601 MCO:SLP:WUP=1 20:30:58.703 -> 24603 TSF:TRI:TSB 20:30:58.703 -> 24605 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:30:58.703 -> 24609 TSF:TDI:TSL 20:30:58.736 -> 24611 MCO:SLP:WUP=-1 20:30:58.736 -> 24613 TSF:TRI:TSB 20:30:58.736 -> send partLen: 8 20:30:58.736 -> send data: 13;13;0;10;33;16;4;1;. 20:30:58.736 -> send CAN len: 8 20:30:58.736 -> send CAN noOfFrames: 1 20:30:58.736 -> send CAN id: 2148532237 20:30:58.736 -> send packet sent 20:30:58.736 -> 24622 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:1 20:30:58.736 -> 24633 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:30:58.770 -> 24637 TSF:TDI:TSL 20:31:00.029 -> 24639 MCO:SLP:WUP=1 20:31:00.029 -> 24640 TSF:TRI:TSB 20:31:00.029 -> 24642 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:31:00.029 -> 24647 TSF:TDI:TSL 20:31:00.062 -> 24649 MCO:SLP:WUP=-1 20:31:00.062 -> 24651 TSF:TRI:TSB 20:31:00.062 -> send partLen: 8 20:31:00.062 -> send data: 13;13;0;10;33;16;4;0;. 20:31:00.062 -> send CAN len: 8 20:31:00.062 -> send CAN noOfFrames: 1 20:31:00.062 -> send CAN id: 2148532237 20:31:00.062 -> send packet sent 20:31:00.062 -> 24658 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:0 20:31:00.062 -> 24670 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:31:00.062 -> 24674 TSF:TDI:TSL 20:31:00.128 -> 24676 MCO:SLP:WUP=1 20:31:00.128 -> 24678 TSF:TRI:TSB 20:31:00.128 -> 24680 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:31:00.128 -> 24684 TSF:TDI:TSL 20:31:00.162 -> 24686 MCO:SLP:WUP=-1 20:31:00.162 -> 24688 TSF:TRI:TSB 20:31:00.162 -> 24690 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:31:00.162 -> 24694 TSF:TDI:TSL 20:31:01.454 -> 24696 MCO:SLP:WUP=1 20:31:01.454 -> 24698 TSF:TRI:TSB 20:31:01.454 -> 24699 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:31:01.487 -> 24705 TSF:TDI:TSL 20:31:01.487 -> 24707 MCO:SLP:WUP=-1 20:31:01.487 -> 24709 TSF:TRI:TSB 20:31:01.487 -> send partLen: 8 20:31:01.487 -> send data: 13;13;0;10;33;16;4;1;. 20:31:01.487 -> send CAN len: 8 20:31:01.487 -> send CAN noOfFrames: 1 20:31:01.521 -> send CAN id: 2148532237 20:31:01.521 -> send packet sent 20:31:01.521 -> 24716 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:1 20:31:01.521 -> 24727 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:31:01.521 -> 24732 TSF:TDI:TSL 20:31:02.880 -> 24733 MCO:SLP:WUP=1 20:31:02.880 -> 24735 TSF:TRI:TSB 20:31:02.880 -> 24737 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:31:02.880 -> 24742 TSF:TDI:TSL 20:31:02.913 -> 24743 MCO:SLP:WUP=-1 20:31:02.913 -> 24745 TSF:TRI:TSB 20:31:02.913 -> send partLen: 8 20:31:02.913 -> send data: 13;13;0;10;33;16;4;0;. 20:31:02.913 -> send CAN len: 8 20:31:02.913 -> send CAN noOfFrames: 1 20:31:02.913 -> send CAN id: 2148532237 20:31:02.913 -> send packet sent 20:31:02.913 -> 24754 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:0 20:31:02.913 -> 24765 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:31:02.946 -> 24769 TSF:TDI:TSL 20:31:03.742 -> 24771 MCO:SLP:WUP=1 20:31:03.742 -> 24773 TSF:TRI:TSB 20:31:03.742 -> 24775 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:31:03.742 -> 24779 TSF:TDI:TSL 20:31:03.775 -> 24781 MCO:SLP:WUP=-1 20:31:03.775 -> 24783 TSF:TRI:TSB 20:31:03.775 -> send partLen: 8 20:31:03.775 -> send data: 13;13;0;10;33;16;4;1;. 20:31:03.775 -> send CAN len: 8 20:31:03.775 -> send CAN noOfFrames: 1 20:31:03.775 -> send CAN id: 2148532237 20:31:03.775 -> send packet sent 20:31:03.775 -> 24792 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:1 20:31:03.775 -> 24803 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:31:03.775 -> 24807 TSF:TDI:TSL 20:31:05.366 -> 24809 MCO:SLP:WUP=1 20:31:05.366 -> 24810 TSF:TRI:TSB 20:31:05.366 -> 24812 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:31:05.366 -> 24817 TSF:TDI:TSL 20:31:05.399 -> 24819 MCO:SLP:WUP=-1 20:31:05.399 -> 24821 TSF:TRI:TSB 20:31:05.399 -> send partLen: 8 20:31:05.399 -> send data: 13;13;0;10;33;16;4;0;. 20:31:05.399 -> send CAN len: 8 20:31:05.399 -> send CAN noOfFrames: 1 20:31:05.399 -> send CAN id: 2148532237 20:31:05.399 -> send packet sent 20:31:05.433 -> 24828 TSF:MSG:SEND,13-13-0-0,s=4,c=1,t=16,pt=1,l=1,sg=0,ft=0,st=OK:0 20:31:05.433 -> 24840 MCO:SLP:MS=0,SMS=0,I1=1,M1=1,I2=255,M2=255 20:31:05.433 -> 24844 TSF:TDI:TSL 20:31:05.532 -> 24846 MCO:SLP:WUP=1 20:31:05.532 -> 24848 TSF:TRI:TSB 20:31:05.532 -> 24850 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 20:31:05.532 -> 24854 TSF:TDI:TSL 20:31:05.565 -> 24856 MCO:SLP:WUP=-1 20:31:05.565 -> 24858 TSF:TRI:TSB 20:31:05.565 -> send partLen: 8 20:31:05.565 -> send data: 13;13;0;10;33;16;4;1;.
-
@Adam-Slowik said in CAN bus transport implementation:
20:30:09.340 -> 2097 !TSM:FPAR:NO REPLY
This means the node doesn't get an answer from the gateway on the find parent request. If that occurs three times, the transport is reinitialised
-
Question: Is your gateway connected to some controller software?
Afaik, MySensors won't work propperly without, this is what you experience as problems with ID request and transport layer reset. Though there are options to get around that, I'd strongly recommend to involve one.
-
a request for information, how to do :
to add the CAN transport you have to modify the files or replace them with what exists ?
- MyTransportCAN.cpp
- MyTransportHAL.h
https://github.com/mysensors/MySensors/pull/1488/commits/492aa631298d5960b4060f94084cdafaaad18f21
I will maybe test the work of AdamSlowik
-
Hi @JeeLet, to test my implementation You should:
- Set up hardware as described in my first post in this thrread.
- Download source from my fork (https://github.com/AdamSlowik/MySensors/archive/refs/heads/development.zip)
- Somewhere in Your lib folder swap official MySensors files with those downloaded.
- Upload "CANSwitch.ino" to first arduino and "GatewaySerialCAN.ino" to second one. Both files can be found in examples.
If everything is fine then You Should get results similar to those presented in my post dated to "14 Jul 2020, 20:42"
Please let Us know if You managed to reproduce My results.
-
Hello
thank you for the answerquestions:
-
which CAN library did you start on,
mcp2515.h or mcp_can.h ...etc -
the management of Float values is also managed ?
(numbers with decimals )
like this library which manages Floats https://github.com/pierremolinaro/acan/search?q=float -
and of course any CAN card is managed, like this one https://www.gotronic.fr/ori-module-bus-can-sbc-can01-28405.jpg
I prepare another test computer for the installation of your version
")
Translated with www.DeepL.com/Translator (free version)
-
-
1
- which CAN library did you start on,
I have used https://github.com/coryjfowler/MCP_CAN_lib
This library is embedded in code in my fork, so if You are going to test My fork You don't have to worry about underlying library. Consider it an implementation detail. If You are going to implement CAN bus transport at Your own, You can pick different library.2
- the management of Float values is also managed ?
I did not tested transferring float numbers over CAN network, however in my opinion such concern is out of the scope of protocol implementation. During implementation My goal was to transfer array of bytes from one arduino to another via CAN. I don't care how those bytes are interpreted. Those bytes can be Strings, ints, floats, images etc. It should not matter.
3
- and of course any CAN card is managed, like this one https://www.gotronic.fr/ori-module-bus-can-sbc-can01-28405.jpg
Any CAN module supported by underlying library should be ok (so after all it's not an implemantation detail). Library readme says it will work with MCP2515 and MCP25625. Module picked by You (https://www.gotronic.fr/art-module-bus-can-sbc-can01-28405.htm) have MCP2515+MCP2562 so You should be god. Module used by Me had MCP2515+tja1050. Yours transciever is different then mine, however I hope it doesn't matter
4
I prepare another test computer for the installation of your version
I would really appreciate Your feedback
-
"you can choose a different library"
I like this freedom of choice, my questioning is not necessary"I would really appreciate your comments"
yes yes in 4 to 5 days, theoreticallyFinally a high reliability Wired Bus for MySensors with the MyS protocol which is extraordinarily rich.
(the RS485 bus is good, but the cables/wiring must be more rigorous and the management of collisions more delicate for X Nodes, and the CAN bus is a good field bus )
-
Hello
to save time, you can tell me more about the configuration of MCP_CAN_lib
not all settings are shown on the MyS sketch
here in an example https://github.com/coryjfowler/MCP_CAN_lib/blob/master/examples/CAN_receive/CAN_receive.ino
there are some parameters to adjustor the filters https://github.com/coryjfowler/MCP_CAN_lib/blob/master/examples/Extended_MaskFilter/Extended_MaskFilter.ino
can you indicate me the files in question ???
(I think I have found but to confirm)to make it clean
thanks
-
So I have pull up some config parameters. Those are defined and briefly described in:
https://github.com/AdamSlowik/MySensors/blob/development/MyConfig.h
lines 270-315
You can set those parameters to different values, but for first run I suggest deploy examples without modifications. By examples I mean those 2 files:
https://github.com/AdamSlowik/MySensors/blob/development/examples/CANSwitch/CANSwitch.ino
https://github.com/AdamSlowik/MySensors/blob/development/examples/GatewaySerialCAN/GatewaySerialCAN.inoIf it fails I would set:
CAN_CLOCK to MCP_16MHZ
because i think can module from Your vendor uses 16MHz (My used 8MHz)filters are set in:
https://github.com/AdamSlowik/MySensors/blob/development/hal/transport/CAN/MyTransportCAN.cpp
line 37 method _initFilters()
without clear reason (eg. bug) I would recommend to not alter it.
Filters are set to drop messages not intended for certain node. Thanks to this MCU do not have to handle 'spam'.If My answer answers Yours questions then great. If this is insufficient ask for a specific parameter or line in code I will try to answer any questions asap
-
a start of error messages return (on both sketches)
IDE version 1.8.19for CANSwitch.ino
the message returns me to the line
MyTransportCAN.cpp --->
163 : ",TOTAL=%"PRIu8",CURR=%"PRIu8",TO=%"PRIu8",FROM=%"PRIu8"\n"), header, messageId, totalPartCount,
228 : ",TOTAL=%"PRIu32",CURR=%"PRIu32",TO=%"PRIu32",FROM=%"PRIu32"\n"), rxId, messageId,the one copy (a part) of the IDE
In file included from /home/mci/Arduino/libraries/MySensors-development/MySensors.h:395:0, from /tmp/arduino_modified_sketch_39381/CANSwitch.ino:43: /home/Arduino/libraries/MySensors-development/hal/transport/CAN/MyTransportCAN.cpp:163:17: warning: invalid suffix on literal; C++11 requires a space between literal and string macro [-Wliteral-suffix] ",TOTAL=%"PRIu8",CURR=%"PRIu8",TO=%"PRIu8",FROM=%"PRIu8"\n"), header, messageId, totalPartCount, ^ /home/Arduino/libraries/MySensors-development/hal/transport/CAN/MyTransportCAN.cpp:163:32: war...... ^... /home/Arduino/libraries/MySensors-development/hal/transport/CAN/MyTransportCAN.cpp:228:18: warning: invalid suffix on literal; C++11 requires a space between literal and string macro [-Wliteral-suffix] ",TOTAL=%"PRIu32",CURR=%"PRIu32",TO=%"PRIu32",FROM=%"PRIu32"\n"), rxId, messageId, ^ /home/Arduino/libraries/MySensors-development/hal/transport/CAN/MyTransportCAN.cpp:228:34: warni.....
-
https://sourcecodeartisan.com/2021/03/06/invalid-suffix-on-literal.html
for the Error code it is
a requirement in C++ 11 (or later).lines 163 and 228 modify and error resolved
.../hal.transport/CAN/MyTransportCAN.cpp
CAN_DEBUG(PSTR("CAN:SND:CANH=%" PRIu32 ",ID=%" PRIu8 ",TOTAL=%" PRIu8 ",CURR=%" PRIu8 ",TO=%" PRIu8 ",FROM=%" PRIu8 "\n"), header, messageId, totalPartCount,CAN_DEBUG(PSTR("CAN:RCV:CANH=%" PRIu32 ",ID=%" PRIu32 ",TOTAL=%" PRIu32 ",CURR=%" PRIu32 ",TO=%" PRIu32 ",FROM=%" PRIu32 "\n"), rxId, messageId,
-
a topo of the day
on the hardware side, I got screwed with an arduino pin that became too soft, too dilated, look for an hour before understanding why no dialog.
Otherwise, on the Gateway side, no problem, MyController recognized well.
and CAN_Switch.ino is good too, my Widget on MyC switches well on the switch change.
listing of the dialog pour le Node 51 (set up in a fixed place )
coter log from MyC:
2022-06-11T18:49:35.167+0200 recd 0;255;3;0;9;1482640 TSF:MSG:READ,51-51-0,s=4,c=1,t=16,pt=1,l=1,sg=0:1 2022-06-11T18:49:35.170+0200 recd 51;4;1;0;16;1 2022-06-11T18:49:35.179+0200 recd 0;255;3;0;9;1482653 TSF:MSG:READ,51-51-0,s=255,c=3,t=21,pt=1,l=1,sg=0:0 2022-06-11T18:49:35.182+0200 recd 51;255;3;0;21;0coter IDE from MyS:
67889 TSF:MSG:BC 68197 TSF:MSG:SEND,51-51-0-0,s=255,c=3,t=21,pt=1,l=1,sg=0,ft=0,st=OK:0 68203 TSF:MSG:READ,0-0-255,s=255,c=3,t=20,pt=0,l=0,sg=0: 68208 TSF:MSG:BC 68836 TSF:MSG:SEND,51-51-0-0,s=255,c=3,t=21,pt=1,l=1,sg=0,ft=0,st=OK:0 68843 MCO:SLP:MS=5,SMS=0,I1=255,M1=255,I2=255,M2=255 68848 TSF:TDI:TSL 68849 MCO:SLP:WUP=-1 ........ it is incompletewell now we have to calm down the CAN bus dialog, the Rx/Tx Led of the gateway looks like a Christmas treetomorrow I'll test a CAN_Switch version2 sketch
-
test with the digital output inputs of 2 Arduino on CAN Bus.
- status of a button and control of a led with MyC
a proof in video that it is functional
all is not functional, on the end of the video, the reset or reboot does not work, (but functional with the RS485 bus)
.... to follow")
(now the Analog values, decimal to test )I would like to test the Node to Node with the filtering.
a question : is it difficult to put the filters on the MySensors sketch ???there are still MySensors on the forum ???
if yes, a help for Adam Slowik would be a great thing.
implement it in MyS Yes YesThanks
-
@JeeLet as I can see You had bussy weekend. I was AFK so I was unable to respond. Within working days I should be able to respond quicker.
@JeeLet said in CAN bus transport implementation:
lines 163 and 228 modify and error resolved
Can you push Your fix to My repo?
@JeeLet said in CAN bus transport implementation:
a proof in video that it is functional
Great job! I never was at this stage.
@JeeLet said in CAN bus transport implementation:
all is not functional, on the end of the video, the reset or reboot does not work, (but functional with the RS485 bus)
.... to followCan You provide (gateway/node) logs from reset scenario. It would be great to have those logs either for RS485 and CAN so I can compare them.
@JeeLet said in CAN bus transport implementation:
I would like to test the Node to Node with the filtering.
a question : is it difficult to put the filters on the MySensors sketch ???Could You describe what kind of test You would like to perform? Right now there is no way to set filters from the sketch. I think it should stay this way.
Perhaps We have different things in mind when We think about filters. I'll try to describe how I see this.
When it comes to CAN frame there is header and body. Header contains metadata and body contains data. mcp2515 can filter frames based on header content. Header contains id of destination node. Based on this id filters are set to drop any messages not intended for current node. This way if gateway want to send message to node with id=51 only node with this id receives this message.
There is exception for this rule. Messages with destination id set to BROADCAST_ADDRESS reaches all nodes.
With this in mind I see no reason to set filters differently. Of course I can be wrong.
Composition of header is described in MyTransportCAN.cpp in method _buildHeader()
As of now my all can modules and arduinos are burried in some box at My attic so I am unable to test anything
-
"Can you provide logs (gateway/node) from the reset scenario. It would be great to have these logs for RS485 and CAN so I can compare them."
Released today 2 gateways connect to MyController
- UNO_usb - Gateway and RS485 bus
- UNO_usb - Gateway and CAN Bus
with connect, a UNO with the basic sketch "RelayWithButtonActuator_base.ino" (slightly modified)
with ... a Led and a Switch, for each bus.The Listing split in several parts
"Log of the IDE and MyC for the two types of bus (node34 and node 54), CAN and RS485.
- Listing Action RESET with MyController 2 parts for CAN and 2 parts for RS485 and - Listing Action On/Off on the node switch or with MyController 4 parts for CAN and 4 parts for RS485No error on the Reset, it works fine, an error from me.
Oh yes, I even found an error
the sendSketchInfo("test xxxxx", "1.0"); is not upsee the end of the video
video....I will answer the other question tomorrow.
-
@Adam-Slowik "Can you push your patch to my repository? " .... I don't know how
On the CAN principle
@Adam-Slowik "Based on this id, the filters are configured to remove all messages not intended for the current node. This way, if the gateway wants to send a message to the node with id = 51, only the node with that id receives that message." ... yes, that's how I see it.
another way to say/explain it.
"The philosophy of CAN is to constitute a messaging system.
The messages (the letter) send on the CAN Bus (the post office), distributed by the CAN Bus (the letter carrier).Each (letter) have each an identifier (stamp of the post
 ) that ... identifies it.
) that ... identifies it.
And put in the right mailbox (the MCP2515) according to the choice of filter/mask ( color, scent? ) of the letter."So there are two "stratum" of dialogue / work.
- one on the Can Bus, and another on the Nodes.
The idea is to relieve the Nodes of unnecessary work/effort with the risks that this brings. Less letter to open
@Adam-Slowik "... my modules and arduinos are buried in a box in my attic..." ? Arduino 8bit and MySensors is over for you?
( if it's a personal / family reason don't say anything )
-
I tested my sketch with clock and OLED to see
bah No the time is not up

I give this information for an overview, it can help for the continuation (but not to give you work
)The listing of the messages of mySensors
test with "void receiveTime" function (without RTC clock)
https://forum.mysensors.org/topic/4809/real-time-clock-module-lcd-display-and-controller-time/8?_=1655208396048..........Log MyC - terminal ssh ......... 2022-06-14T14:01:45.115+0200 recd 0;255;3;0;9;65310350 TSF:MSG:READ,55-55-0,s=255,c=3,t=1,pt=0,l=0,sg=0: 2022-06-14T14:01:45.119+0200 recd 0;255;3;0;9;65310356 TSF:MSG:ECHO REQ 2022-06-14T14:01:45.127+0200 recd 0;255;3;0;9;65310360 TSF:MSG:SEND,0-0-55-55,s=255,c=3,t=1,pt=0,l=0,sg=0,ft=0,st=OK: 2022-06-14T14:01:45.127+0200 recd 55;255;3;0;1; 2022-06-14T14:01:45.146+0200 sent 55;255;3;0;1;1655215305 2022-06-14T14:01:45.160+0200 recd 0;255;3;0;9;65310394 TSF:MSG:SEND,0-0-55-55,s=255,c=3,t=1,pt=0,l=10,sg=0,ft=0,st=OK:1655215305..........Log MyS - terminal IDE ......... time current:0 ------------------------------------------- 58007 TSF:MSG:SEND,55-55-0-0,s=255,c=3,t=1,pt=0,l=0,sg=0,ft=0,st=OK: 58017 TSF:MSG:READ,0-0-55,s=255,c=3,t=1,pt=0,l=0,sg=0: 58022 TSF:MSG:ECHOavec Bus RS485
..........Log MyC - terminal ssh ......... 2022-06-14T14:22:41.265+0200 recd 0;255;3;0;9;72000090 TSF:SAN:OK 2022-06-14T14:22:41.274+0200 recd 0;255;3;0;9;72000096 TSM:READY:NWD REQ 2022-06-14T14:22:41.298+0200 recd 0;255;3;0;9;72000115 ?TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK: 2022-06-14T14:22:41.917+0200 recd 0;255;3;0;9;72000736 TSF:MSG:READ,22-22-0,s=255,c=3,t=21,pt=1,l=1,sg=0:0 2022-06-14T14:22:41.920+0200 recd 22;255;3;0;21;0 .........Log MyS - terminal IDE ......... time current:1422 ------------------------------------------- 423956 TSF:MSG:READ,0-0-255,s=255,c=3,t=20,pt=1,l=1,sg=0:0 423962 TSF:MSG:BC 424008 TSF:MSG:SEND,22-22-0-0,s=255,c=3,t=21,pt=1,l=1,sg=0,ft=0,st=OK:0 requestOn-----------------------------------------
-
@JeeLet said in CAN bus transport implementation:
Arduino 8bit and MySensors is over for you?
No it is not over. Right now I don't have enough time. Now I am able to work for let's say 1 hour per week. Probably I will become more active at the end of 2023

@JeeLet said in CAN bus transport implementation:
bah No the time is not up
Here You posted RS485 version:
https://forum.mysensors.org/topic/4809/real-time-clock-module-lcd-display-and-controller-time/8?_=1655208396048Could You post here CAN version?
-
@Adam-Slowik "Could you post the CAN version here?"
it's the same, except that the bus is not rs485 but CAN
...... ........ #define MY_NODE_ID 55 /*Node en ID static*/ #define MY_CAN #include "SSD1306Ascii.h" ........ .....but I'll go back to PaulStoffregen's Lib <TimeLib.h> to see if I can simplify the basic sketch of MySensors
-
In previous example (with diodes) did You set CAN_CLOCK to MCP_16MHZ?
-
no it stayed on 8Mhz ?
I didn't modify anything (the other sketches work)
But I just looked at the quartz and it's 16M!! (SW-65-16M)
I am lost
https://www.gotronic.fr/art-module-bus-can-sbc-can01-28405.htm
but on the doc there is :
The 8000000 stands that the MCP2515 operates with a clock of 8 MHz. This
depends on the quartz used and may need to be adjusted.error
on the official doc it's a 16Mhz like mine.- https://www.joy-it.net/en/products/SBC-CAN01
OSCILLATOR 16 MHz Crystal Oscillator
so 8Mhz or 16Mhz?
and why does it work with the previous sketches?
- https://www.joy-it.net/en/products/SBC-CAN01
-
I think the dialogue is good
but the problem is the length of the storylinea part of the dialog on the IDE terminal for both types
CAN and RS485- IDE terminal sur RS485 : 4066 TSF:MSG:ECHO 4132 TSF:MSG:READ,0-0-22,s=255,c=3,t=1,pt=0,l=10,sg=0:1655285320 8018 TSF:MSG:SEND,22-22-0-0,s=255,c=3,t=1,pt=0,l=0,sg=0,ft=0,st=OK: 8054 TSF:MSG:READ,0-0-22,s=255,c=3,t=1,pt=0,l=0,sg=0: 8058 TSF:MSG:ECHO 8111 TSF:MSG:READ,0-0-22,s=255,c=3,t=1,pt=0,l=10,sg=0:1655285324 newTime:1655285324 ------------------------------------------- - IDE terminal sur CAN : 22224 MCO:REG:REQ 22226 TSF:MSG:SEND,55-55-0-0,s=255,c=3,t=26,pt=1,l=1,sg=0,ft=0,st=OK:2 22233 !MCO:PRO:RC=1 22235 TSF:MSG:READ,0-0-55,s=255,c=3,t=27,pt=1,l=1,sg=0:1 22240 MCO:PIM:NODE REG=1 28004 TSF:MSG:SEND,55-55-0-0,s=255,c=3,t=1,pt=0,l=0,sg=0,ft=0,st=OK: 28014 TSF:MSG:READ,0-0-55,s=255,c=3,t=1,pt=0,l=0,sg=0: 28019 TSF:MSG:ECHO newTime:0 -------------------------------------------sketch
void receiveTime(unsigned long controllerTime) { if (receiveTime) stateCom = true ; else stateCom = false; newTime = controllerTime; " " .... Serial.print(" newTime:"); Serial.print(newTime);
-
frequency change
with 16Mhz I have a NACK
// #define CAN_CLOCK MCP_16MHZ 105 TSM:FPAR 18107 ?TSF:MSG:SEND,55-55-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=4,st=NACK: newTime:0 ------------------------------------------- time current:0 ------------------------------------------- 20115 !TSM:FPAR:NO REPLY 20117 TSM:FPAR 20119 ?TSF:MSG:SEND,55-55-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=5,st=NACK: // #define CAN_CLOCK MCP_8MHZ 8004 TSF:MSG:SEND,55-55-0-0,s=255,c=3,t=1,pt=0,l=0,sg=0,ft=0,st=OK: 28014 TSF:MSG:READ,0-0-55,s=255,c=3,t=1,pt=0,l=0,sg=0: 28019 TSF:MSG:ECHO newTime:0 ------------------------------------------- time current:0 ------------------------------------------- 38005 TSF:MSG:SEND,55-55-0-0,s=255,c=3,t=1,pt=0,l=0,sg=0,ft=0,st=OK: 38016 TSF:MSG:READ,0-0-55,s=255,c=3,t=1,pt=0,l=0,sg=0:
-
in the sketch I added lines to visualize the buffer data
log IDE :
newTime:0 ------------------------------------------- Extended ID: 0x0410FF00 DLC: 8 Data: 0x00 0x00 0xFF 0x0A 0x23 0x14 0xFF 0x00 88010 TSF:MSG:SEND,55-55-0-0,s=255,c=3,t=1,pt=0,l=0,sg=0,ft=0,st=OK: Extended ID: 0x05103700 DLC: 7 Data: 0x00 0x00 0x37 0x02 0x13 0x01 0xFF Extended ID: 0x06303700 DLC: 8 Data: 0x00 0x00 0x37 0x52 0x03 0x01 0xFF 0x31 newTime:0 -------------------------------------------I stop for me, I pause for 1 day or 2
-
I found a bug in my code. Please re-download new version.
If something won't work please enable CAN debug by adding:
#define MY_DEBUG_VERBOSE_CANadd this to gateway and to node sketch
-
#define MY_DEBUG_VERBOSE_CAN .....yes yes I already tested it, it's very good.
(a very useful function)..go to
- Reloading the CAN-MyS update
- ClearEeprom of the GW and Nodes
- Reloading of Sketches on GW and Nodes
Bravo

-
sendSketchInfo(" text ...."); and well up
-
requestTime(receiveTime); and functional
Ahhhhhh Lovely this is great

I offer the coffee crossing

(what was the problem ??? )
After the test on the Digital I/O of the Nodes ,
now I test the Analog I/Oa Super Thank You @Adam-Slowik
-
a test with DHT22 probes.
the values go up well on MyC
real decimal valueshere is a screen shot
I have to find another type of probes, the DHT22 give me losses, or my sketch is to reviewReEdit
error
I got excited too fast
the values are not refreshed.
I look better
ReRe-edition
I made a mistake, as I play a little too much with MyController, I add and remove gateways from nodes and other salads.
and well in the end it makes no senseI cleaned up the Yaml files of MyC and it's better
-
@JeeLet said in CAN bus transport implementation:
what was the problem ???
Previous messages used 7 bytes long payload. Single CAN frame is able to transfer 8 bytes. So all messages was contained in single frame. Example with time, used 17 (!) bytes long payload. In order to transfer 17 bytes there is need to split data to 3 messages (8+8+1). Next in the other side of wire You have to concat it. This mechanism of splitting and concating had a bug. For details check last 3 commits (at the bottom)
https://github.com/mysensors/MySensors/compare/development...AdamSlowik:development
-
Gateway Logs on MyController
(CAN Bus and RS485 Bus)two separate files
CAN log
RS485 logfiles split in parts :
A : gateways startup
B : reboot of the gateways
C : launch of MyClock Nodes (id23 and id55)
D ; periodic refresh requestTime(receiveTime)
E ; send value (1700 and 2100)(I have prepared the work for you to read)
a 1st analysis
- (at the bottom of the listing, the sending of values "1700 or 2100" with MyC)
The RS485 bus dialogues much more, the CAN bus is more timid
Adam Slowik bravo
I test what now???
the ACK ??Oh yes, I have to check the disconnection of the nodes.
The Gateway gives me the impression that the information does not go back to MyC if a Node is off ???
- (at the bottom of the listing, the sending of values "1700 or 2100" with MyC)
-
@JeeLet said in CAN bus transport implementation:
I test what now???
I was at similar position some time ago:
@Adam-Slowik said in CAN bus transport implementation:
Any suggestion what to test next?
I have no idea what to test next. I do not use MySensors. I hope this will change in the future, but as of now I'm a newbie.
If You won't get any advice from more experienced users I would suggest to do some long running test to see if it's stable. If it's stable try to use it in some real use cases.
If You find any bugs in transmission layer post logs here. I will do My best to support CAN, because I will need it in a future.
-
" I would suggest doing a long term test to see if it is stable." yes I will stress it to see the weakness
".. If it is stable, try to use it in real use cases." yes that's the point
One last question
I'm going from 8Mhz to 16Mhz (in development/MyConfig.h on line 306)
question: can you explain how I can bring up in the sketch the parameters that are related to the MCP_CAN_lib library
it should not be complicated for me
it is only text to insert ???an example with the #define CAN_CLOCK MCP_8MHZ
Thanks Adam Slowik
-
@JeeLet said in CAN bus transport implementation:
I'm going from 8Mhz to 16Mhz (in development/MyConfig.h on line 306)
In My opinion You should not override MyConfig.h. If You want to go for 16MHz You should put:
#define CAN_CLOCK MCP_16MHZin Your sketch. Preferably somewhere around line:
#define MY_CAN@JeeLet said in CAN bus transport implementation:
can you explain how I can bring up in the sketch the parameters that are related to the MCP_CAN_lib library
If it's a parameter that is listed in MyConfig.h simply define it like 'CAN_CLOCK'. If parameter is not listed in MyConfig please let me know exactly what parameter You would like to modify, then I will try to figure it out.
-
I just did the test, switch to 16Mhz in the file MyConfig.h
it works well, I have no error
#define CAN_CLOCK MCP_16MHZI didn't think it was possible, is it incompatible?
overwritten the values of the file MyConfig.hthank you for the information
-
I'm not sure if We understood each other. This line
#define CAN_CLOCK MCP_16MHZshould be in Your sketch. You should not modify MyConfig.h.
Libraries (in general not only MySensors) should not be modified. MyConfig.h is part of library.Let's take a look at this code from MyConfig.h
#ifndef CAN_CLOCK #define CAN_CLOCK MCP_8MHZ #endif.This is if statement. If user didn't defined
CAN_CLOCKdefine it asCAN_CLOCK MCP_8MHZ
If user defined (in sketch)CAN_CLOCKthen do nothing.So You can treat MyConfig.h as a set of defaults which can be overridden from sketch.
I have put all relevant (in My opinion) properties from
MCP_CAN_libinto MyConfig.h, so You can override them. If I have missed some relevant property please let Me know.
-
Thank you for this clarification.
(yes translator and my neuron it gives crooked dialog)"If I have missed a relevant property, please let me know."
The list of #define go up for the MySensors sketch .
( if I'm not mistaken ?)***for MCP_CAN_lib **************** MyConfig.h line 280 to 315 CAN_INT // Pin for interrupting an incoming message. CAN_CS // Chip selection pin. CAN_SPEED // Transmission speed. The allowed values can be found in mcp_can_dfs.h CAN_CLOCK // Can clock. Allowed values can be found in mcp_can_dfs.h. CAN_BUF_SIZE // Assembly buffer size. As long messages can be split and arrive mixed with other messages, an assembly buffer is needed. **** for MyS **************** MyConfig.h line 2492 to 2494 MY_CAN // Set this to use the CAN wire transport for sensor network communication. MY_DEBUG_VERBOSE_CAN // Set this for verbose debugging printouts related to the %CAN driver.can be added, for testing and controlling the CAN bus
#define CAN_MSGAVAIL #define CAN_OK #define CAN_CTRLERRORThanks
return of the last 24 hours .
CAN bus no error, good dialogue, no hole in the measurements and commands.the hardware base on the bus is :
gateway + node 55 + node 56 .I will add another node 57.
I think to go until 6 nodes
-
@JeeLet said in CAN bus transport implementation:
The list of #define go up for the MySensors sketch .
( if I'm not mistaken ?)You are right.
@JeeLet said in CAN bus transport implementation:
can be added, for testing and controlling the CAN bus
#define CAN_MSGAVAIL
#define CAN_OK
#define CAN_CTRLERRORI'm afraid i do not understand what You want to achieve.
To clarify things lets look atCAN_CLOCKCAN_CLOCKcan take values: 0 or 1 or 2 those values are defined in mcp_can_dfs.h:#define MCP_20MHZ 0 #define MCP_16MHZ 1 #define MCP_8MHZ 2If You want to use 8MHz You can
#define CAN_CLOCK 2
or
#define CAN_CLOCK MCP_8MHZ
Both lines will do the same. However#define CAN_CLOCK MCP_8MHZis recommended approach.
SoCAN_CLOCKcan take one of values values (0,1,2), and user (based on used hardware) should pick one of them.Next example could be
CAN_INT. User should be able to pick which interrupt pin should be used.Now when it comes to:
#define CAN_MSGAVAIL #define CAN_OK #define CAN_CTRLERRORin
mcp_can_dfs.hWe can find a section:#define CAN_OK (0) #define CAN_FAILINIT (1) #define CAN_FAILTX (2) #define CAN_MSGAVAIL (3) #define CAN_NOMSG (4) #define CAN_CTRLERROR (5) #define CAN_GETTXBFTIMEOUT (6) #define CAN_SENDMSGTIMEOUT (7) #define CAN_FAIL (0xff)This We can treat as return code dictionary.
For example when I initialize CAN in MyTransportCAN.cpp:if (CAN0.begin(MCP_STDEXT, CAN_SPEED, CAN_CLOCK) != CAN_OK) { canInitialized = false; return false; } canInitialized = true;I could write
if (CAN0.begin(MCP_STDEXT, CAN_SPEED, CAN_CLOCK) != 0but recommended approach is to use dictionary key (CAN_OK) instead of dictionary value (0)Now overriding
CAN_OKto777instead of0is possible, but it won't cause nothing but chaos. If We do that the functionCAN0.begin(MCP_STDEXT, CAN_SPEED, CAN_CLOCK)would return777instead of0. I don't think user should do that.Code from
mcp_can.cpp:INT8U MCP_CAN::checkReceive(void) { INT8U res; res = mcp2515_readStatus(); /* RXnIF in Bit 1 and 0 */ if (res & MCP_STAT_RXIF_MASK) { return CAN_MSGAVAIL; } else { return CAN_NOMSG; } }This function returns dictionary key
CAN_MSGAVAILorCAN_NOMSGbut if We could stop in debug We would see3or4
Again overridingCAN_MSGAVAILto let's say42won't give user nothing.@JeeLet said in CAN bus transport implementation:
return of the last 24 hours .
CAN bus no error, good dialogue, no hole in the measurements and commands.
the hardware base on the bus is :
gateway + node 55 + node 56 .
I will add another node 57.
I think to go until 6 nodesI keep My fingers crossed. Great job.
-
The original idea was: how to check the status of the CAN bus.
. is there any dialogue ?
. are there any messages?of course this can be done with MySensors.
But to get as close as possible to the communication channel (the CAN bus) I thought it was easy to do.
this is by reading the post of bricoleau here
text french
that the idea came to me.- on the arduino have a blinking led to say that the CAN bus is out of order (but we forget, it loads the program unnecessarily)
and also because you suggested it to me
yes we have to beat the iron when it is hot, and my time available for the computer will soon be reduced (purchase and work of a house)I appreciate very much your explanatory note, thank you
I activated the 16Mhz in the sketch, and put it back in the library
#define MY_NODE_ID 57 /*Node en ID static*/ #define MY_CAN #define CAN_CLOCK MCP_16MHZ
-
@JeeLet said in CAN bus transport implementation:
The original idea was: how to check the status of the CAN bus.
. is there any dialogue ?
. are there any messages?
of course this can be done with MySensors.
But to get as close as possible to the communication channel (the CAN bus) I thought it was easy to do.That is something I can work with. I will check if used library provides some function to check bus status.
@JeeLet said in CAN bus transport implementation:
my time available for the computer will soon be reduced (purchase and work of a house)
I totally understand.
-
So library gives us 3 interesting functions:
INT8U checkError(void); INT8U errorCountRX(void); INT8U errorCountTX(void);Full description can be found in library source code and in documentation chapter 6:
https://ww1.microchip.com/downloads/en/DeviceDoc/MCP2515-Stand-Alone-CAN-Controller-with-SPI-20001801J.pdflong story short:
INT8U checkError(void);returns:
-CAN_CTRLERRORwhen things are bad or very bad
-CAN_OKwhen things are ok or not so bad (error counters below 96)
I would like to chage implementation of sanity check to something like this:
bool transportSanityCheck(void) { return (CAN0.getError()==CAN_OK) }It won't blink diodes in case of communication problems, but will provide some feedback about communication to MySensors library.
2)
INT8U errorCountRX(void);return error counter for received messages. AFAIK this counter is incremented when error occurs and decremented when message is received. I'm not a 'radio guy' but i think this could be returned asint16_t transportGetReceivingSNR(void)orint16_t transportGetReceivingRSSI(void). I know SNR and RSSI are radio related parameters, but perhaps We could bend the border here. Maybe some 'radio guy' could say something about this idea?3)
INT8U errorCountTX(void);same situation as with #2. 'Radio guy' opinion would by great.Again ideas #2 and #3 are not solving problems, but providing feedback to MySensors.
Are My ideas ok, or do they do not pass
sanityCheck()
-
"Are my ideas good" .. yes yes c'est tout bon
"It will not flash the diodes in case of communication problems" ... it's not a problem, Christmas is still far
But yes a counter that increments is a good thing.
what do you want me to test ????
bool transportSanityCheck(void) { return (CAN0.getError()==CAN_OK) }The "radio guy" opinion would be great.
((I'll look for possible help ). )Re-Edit
hal/transport/CAN/MyTransportCAN.cpp
bool transportSanityCheck(void) { // not implemented yet return true; }
Edit
I searched the web, and using SNR RSSI with the CAN bus is a dead end.
https://www.thethingsnetwork.org/docs/lorawan/rssi-and-snr/
-
.. bip bip
-
Are You still have an issue when
MY_DEBUGis deactivated? Have You tried to add delay as is was suggested in one of the threads You found?
-
sorry for the alert.
it was an error in the gateway sketch
a ... #define MY_WITH_LEDS_BLINKING_INVERSE... duplicate, is misplaced
désolé
go to a fourth node
(Gw0 - Nodes 55 56 57 58 )
-
hello
did you find some time to add the CAN bus error feedback?
the 2 and 3 is good, enough

and give me the procedure for the sketch
-
@Adam-Slowik, @JeeLet
Ok, I will give CAN-Bus a try. This is my test setup: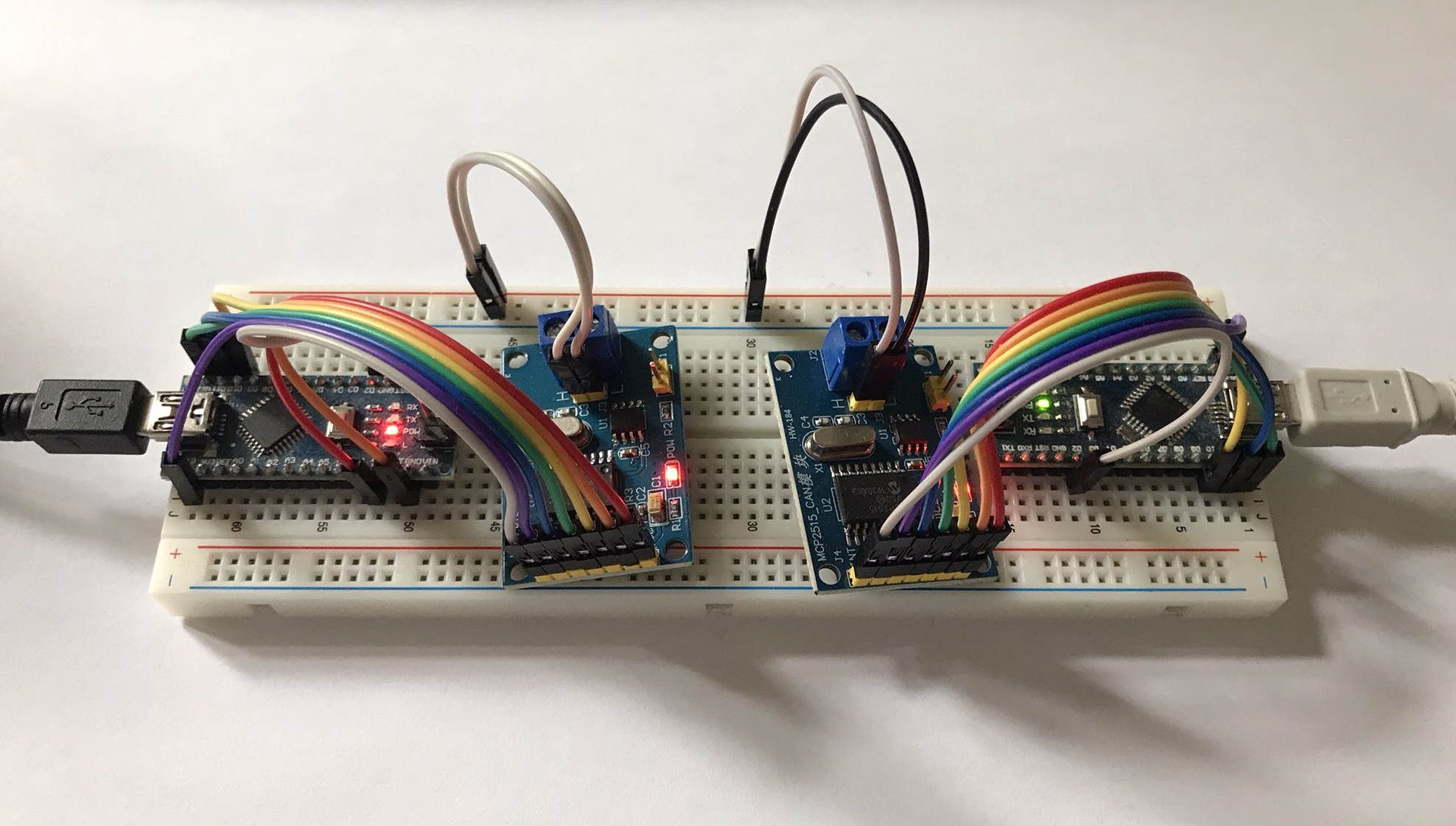
I will use the demo sketches from Adam's fork. Let you know how it works for me.
-
what do you want me to test ????
bool transportSanityCheck(void) { return (CAN0.getError()==CAN_OK) }The "radio guy" opinion would be great.
((I'll look for possible help ). )I'm not a "radio guy", but I think this code change looks fine. When sanity check fails then MySensors core calls transportInit() which would try to re-initialise the MCP2515 module.
In my setup with only 2 CAN modules I'm afraid this will always return CAN_OK. So no idea how to check this. May be unplug the both CAN wires?
-
@Adam-Slowik, @JeeLet Ok, with the both sketches it works with some limitations.
Nice work so far - thank you for contributing!I have done some modifications in the CAN transport files.
@Adam-Slowik I would like to create a PR in your forked repo. Then we can discuss the code changes in GitHub. Would that be Ok for you - do you have time for this?One limitation I found so far are long MyMessages. They can be up to 32 byte - which results in up to 4 CAN-Bus sub telegrams. When I send 32 byte message I observed the sub telegrams do not always arrive in send order in MyTransportCAN.cpp like this:
19916 CAN:RCV:CANH=2202010368,ID=3,TOTAL=4,CURR=0,TO=3,FROM=0 19921 CAN:RCV:LN=8,DTA0=0,DTA1=0,DTA2=3,DTA3=202,DTA4=9,DTA5=2,DTA6=0,DTA7=49 19929 CAN:RCV:SLOT=0,PART=1 19932 CAN:RCV:CANH=2202075904,ID=3,TOTAL=4,CURR=1,TO=3,FROM=0 19937 CAN:RCV:LN=8,DTA0=50,DTA1=51,DTA2=52,DTA3=53,DTA4=54,DTA5=55,DTA6=56,DTA7=57 19945 CAN:RCV:SLOT=0,PART=2 19947 CAN:RCV:CANH=2202206976,ID=3,TOTAL=4,CURR=3,TO=3,FROM=0 19953 CAN:RCV:LN=8,DTA0=56,DTA1=57,DTA2=48,DTA3=49,DTA4=50,DTA5=51,DTA6=52,DTA7=53 19960 !CAN:RCV:proper slot not found 19964 CAN:RCV:CANH=2202141440,ID=3,TOTAL=4,CURR=2,TO=3,FROM=0 19970 CAN:RCV:LN=8,DTA0=48,DTA1=49,DTA2=50,DTA3=51,DTA4=52,DTA5=53,DTA6=54,DTA7=55 19978 CAN:RCV:SLOT=0,PART=3Sub telegram 3 arrives before 2.
I'm afraid the function _findCanPacketSlot() needs an update to handle this.
@Adam-Slowik Do you see a chance for you to update the logic next time?Other limitation I see is the limited CAN telegram buffer of 3 packets in the MCP2515 module. I'm afraid for reliable operation with MySensors a change from polling to interrupt mode is required.
But this can be done later, after the fix for the PacketSlot logic.
-
In logic analyser it looks like this:
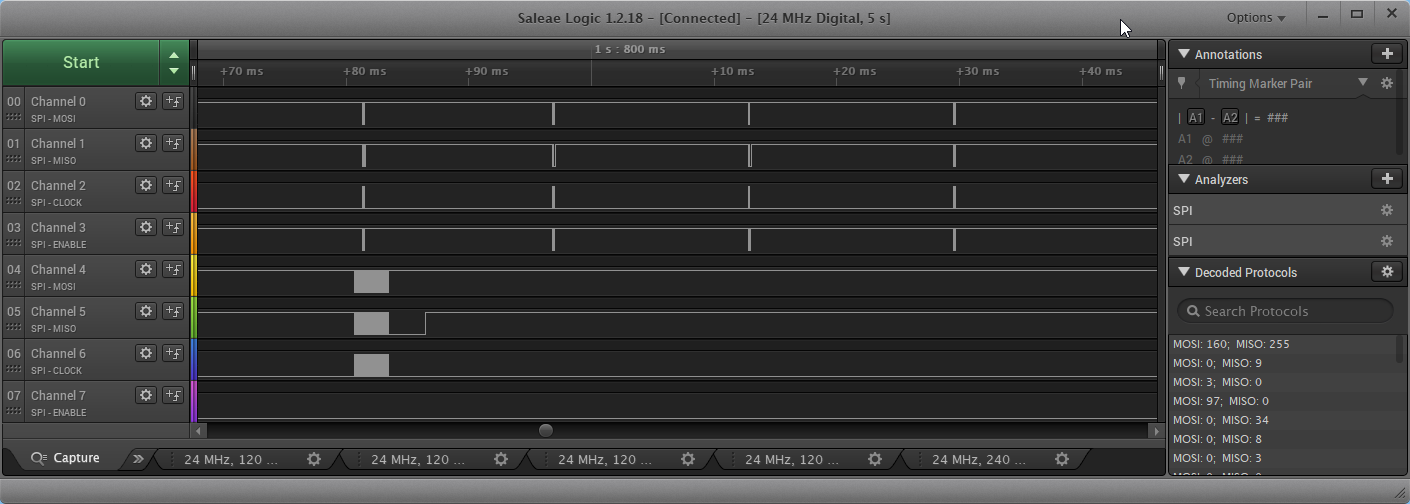
Upper 4 channels are from node, lower ones are from gateway.Close up from gateway send (4 packets):
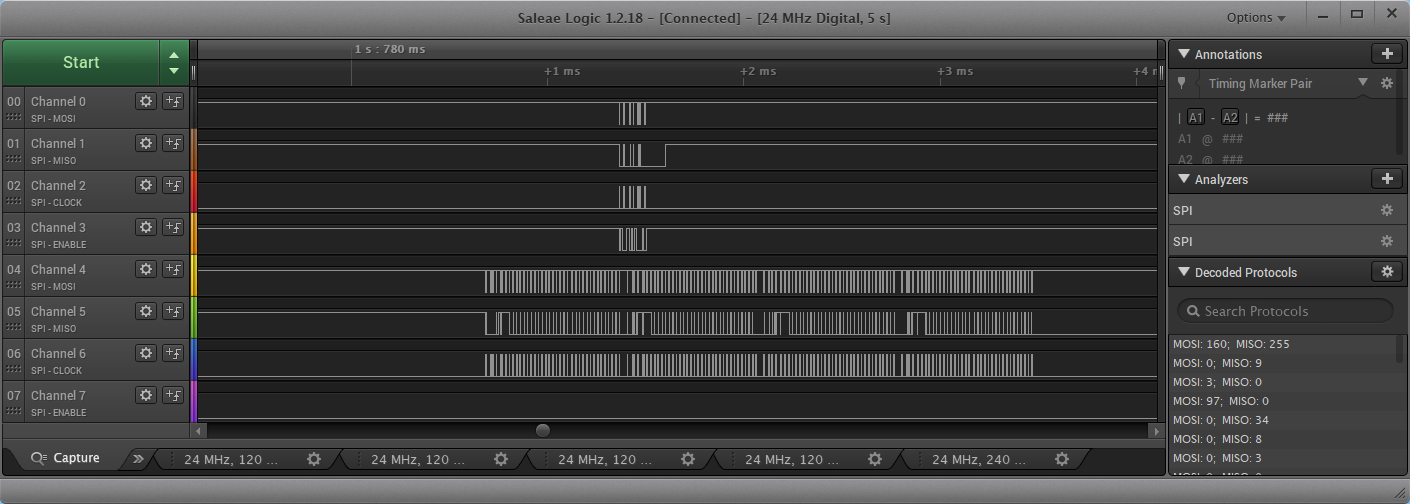
-
@virtualmkr said in CAN bus transport implementation:
I'm not a "radio guy", but I think this code change looks fine. When sanity check fails then MySensors core calls transportInit() which would try to re-initialise the MCP2515 module.
Ok. I'll update code.
@virtualmkr said in CAN bus transport implementation:
I have done some modifications in the CAN transport files.
@Adam-Slowik I would like to create a PR in your forked repo. Then we can discuss the code changes in GitHub. Would that be Ok for you - do you have time for this?Sure. Make PR. I'll try to review it within 48h.
@virtualmkr said in CAN bus transport implementation:
When I send 32 byte message I observed the sub telegrams do not always arrive in send order
Other limitation I see is the limited CAN telegram buffer of 3 packets in the MCP2515 module. I'm afraid for reliable operation with MySensors a change from polling to interrupt mode is required.
I think this two issues are linked. Now packets are sent in correct order (could You verify it?). If packets are sent in short periods We should use interrupt to keep MCP2515 buffers empty. When We fail to keep buffers empty (due to polling mechanism) We receive sub telegrams in mixed order. This theory could be true if MCP2515 buffers are implemented as LIFO. I'll look into documentation to figure it out.
Anyway both fixes are worth to implement. I'll try to do this over weekend.
-
Hello
CAN Bus is still functional, and no problem.a question : is it possible to implement the use of 2 CAN Module on the same Gateway.
2 CAN bus or RS485 + CANas for the RS485 in example for a Mega2560 board
MyConfig.h ...... * Example: @code #define MY_RS485_HWSERIAL Serial1 @endcode */ //#define MY_RS485_HWSERIAL (Serial1)
{kind=link}
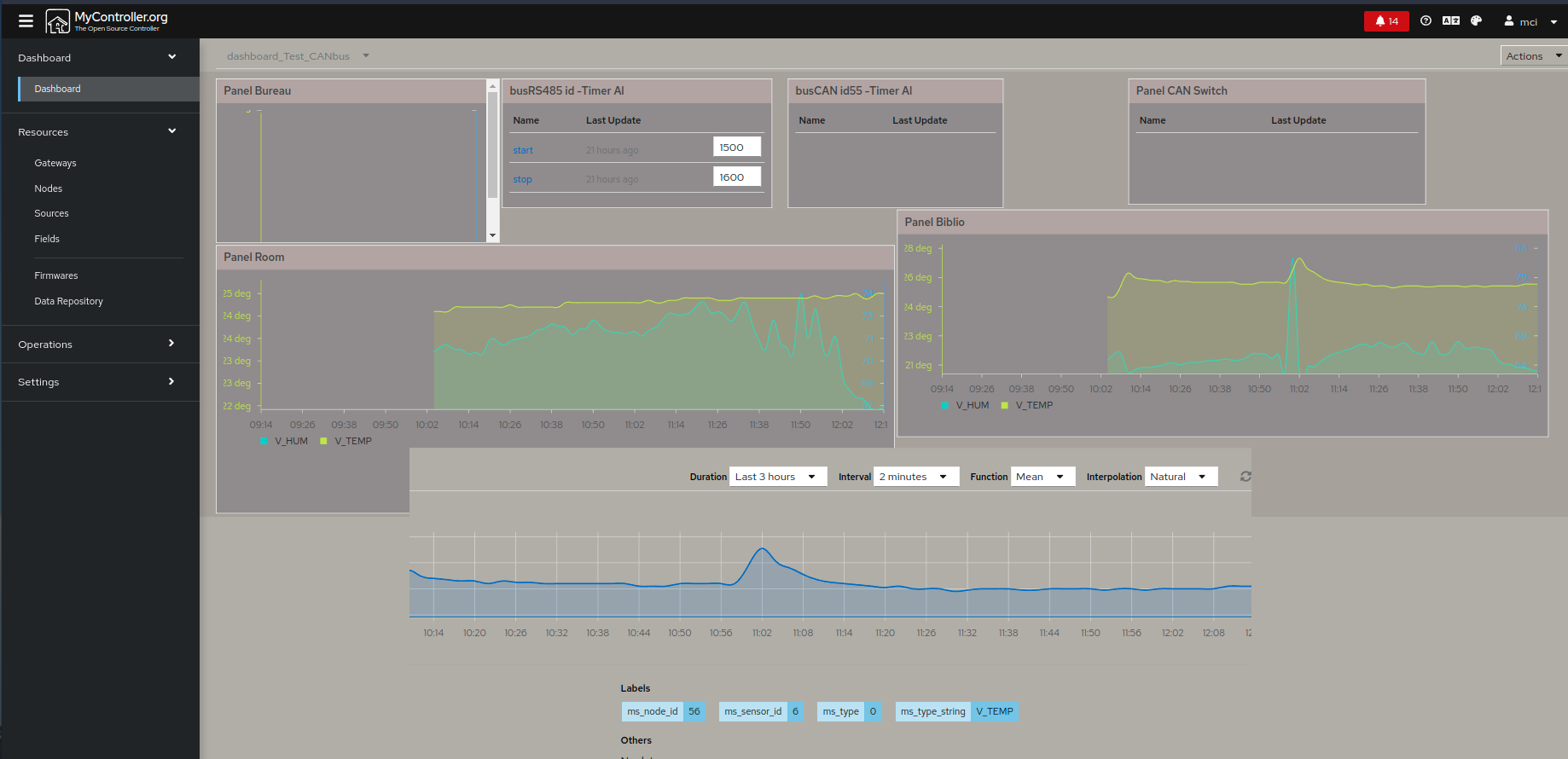{kind=link}