Roller shutter(s_cover) on Domoticz
-
hello. I'm building and remake of Simple cover actuator from @dpressle (here), i call it a remake because my shutter have 2 relays ,one for UP and 1 for Down(not power and direction like original one)
and i'm having problems to make it work like "blind percentage" switch type on Domoticz.
i read that they were not supported 4 years ago but i think it was already corrected.Right?
picture above its what i got on domoticz, up,down and stop works,but percentage its buggy ,not respond, and status its always closed,even when windows it' full open(full up).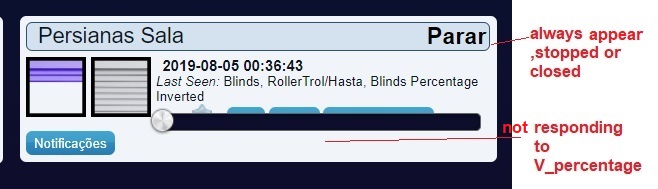
my edited code
// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_RFM69 //#define MY_RF24_PA_LEVEL RF24_PA_LOW //#define MY_REPEATER_FEATURE #include <Bounce2.h> #include <MySensors.h> #include <SPI.h> // uncomment if we want to manually assign an ID //#define MY_NODE_ID 1 / #define BUTTON_UP_PIN 5 // Arduino Digital I/O pin number for up button #define BUTTON_DOWN_PIN 6 // Arduino Digital I/O pin number for down button //#define BUTTON_STOP_PIN 7 // Arduino Digital I/O pin number for stop button #define RELAY_UP_PIN 3 // Arduino Digital I/O pin number for direction relay #define RELAY_DOWN_PIN 4 // Arduino Digital I/O pin number for power relay #define RELAY_ON 0 #define RELAY_OFF 1 //#define RELAY_DOWN 1 //#define RELAY_UP 0 #define DIRECTION_DOWN 1 #define DIRECTION_UP 0 #define SKETCH_NAME "Cover" #define SKETCH_VER "2.0" #define CHILD_ID_COVER 0 // sensor Id of the sensor child #define STATE_UP 100 // 100 is open - up #define STATE_DOWN 0 // 0 is closed - down //#define CHILD_ID_CALIBRATE 1 // sensor Id of the sensor child to calibrate #define CHILD_ID_SET 1 // sensor Id of the sensor child to init the roll time #define PRESENT_MESSAGE "shuttle for Livingroom" const int LEVELS = 100; //the number of levels float rollTime = 28.0; //the overall rolling time of the shutter const bool IS_ACK = false; //is to acknowlage static bool initial_state_sent = false;//for hass we need at list one state send at begining // debouncing parameters int value = 0; int oldValueUp = 0; int oldValueDown = 0; //int value1=0;int value2=0; int oldValueStop=0; int oldValueStop1=0; //static unsigned long last_interrupt_time_up = 0; //static unsigned long last_interrupt_time_down = 0; //static unsigned long debounce_time = 200; Bounce debouncerUp = Bounce(); Bounce debouncerDown = Bounce(); //Bounce debouncerStop = Bounce(); // shutter position parameters float timeOneLevel = rollTime / LEVELS; int requestedShutterLevel = 0; int currentShutterLevel = 0; unsigned long lastLevelTime = 0; bool isMoving = false; int directionUpDown; enum CoverState { STOP, UP, // Window covering. Up. DOWN, // Window covering. Down. }; static int coverState = STOP; MyMessage msgUP(CHILD_ID_COVER, V_UP); MyMessage msgDown(CHILD_ID_COVER, V_DOWN); MyMessage msgStop(CHILD_ID_COVER, V_STOP); MyMessage msgPercentage(CHILD_ID_COVER, V_PERCENTAGE); //MyMessage msgCode(CHILD_ID_SET, V_IR_SEND); void sendState() { // Send current state and status to gateway. send(msgUP.set(coverState == UP)); send(msgDown.set(coverState == DOWN)); send(msgStop.set(coverState == STOP)); send(msgPercentage.set(currentShutterLevel)); } void shuttersUp(void) { #ifdef MY_DEBUG Serial.println("Shutters going up"); #endif if (digitalRead(RELAY_DOWN_PIN) == RELAY_ON) { digitalWrite(RELAY_DOWN_PIN, RELAY_OFF); delay(20); } digitalWrite(RELAY_UP_PIN, RELAY_ON); directionUpDown = DIRECTION_UP; isMoving = true; coverState = UP; sendState(); } void shuttersDown(void) { #ifdef MY_DEBUG Serial.println("Shutters going down"); #endif if (digitalRead(RELAY_UP_PIN) == RELAY_ON) { digitalWrite(RELAY_UP_PIN, RELAY_OFF); delay(20); } digitalWrite(RELAY_DOWN_PIN, RELAY_ON); directionUpDown = DIRECTION_DOWN; isMoving = true; coverState = DOWN; sendState(); } void shuttersHalt(void) { #ifdef MY_DEBUG Serial.println("Shutters halted X"); #endif // Serial.println("2 BOTOES OFF"); // if (digitalRead((RELAY_UP_PIN) || (RELAY_DOWN_PIN) )== RELAY_ON) { digitalWrite(RELAY_UP_PIN, RELAY_OFF); digitalWrite(RELAY_DOWN_PIN, RELAY_OFF); delay(20); //} isMoving = false; requestedShutterLevel = currentShutterLevel; #ifdef MY_DEBUG Serial.println("saving state to: "); Serial.println(String(currentShutterLevel)); #endif saveState(CHILD_ID_COVER, currentShutterLevel); coverState = STOP; //sendState(); } void changeShuttersLevel(int level) { int dir = (level > currentShutterLevel) ? DIRECTION_UP : DIRECTION_DOWN; if (isMoving && dir != directionUpDown) { shuttersHalt(); } requestedShutterLevel = level; } void initShutters() { #ifdef MY_DEBUG Serial.println("Init Cover"); #endif shuttersUp(); delay((rollTime + timeOneLevel * LEVELS) * 1000); currentShutterLevel = STATE_UP; requestedShutterLevel = currentShutterLevel; } void receive(const MyMessage &message) { #ifdef MY_DEBUG Serial.println("recieved incomming message"); Serial.println("Recieved message for sensor: "); Serial.println(String(message.sensor)); Serial.println("Recieved message with type: "); Serial.println(String(message.type)); #endif if (message.sensor == CHILD_ID_COVER) { switch (message.type) { case V_UP: //Serial.println(", New status: V_UP"); changeShuttersLevel(STATE_UP); //state = UP; //sendState(); break; case V_DOWN: //Serial.println(", New status: V_DOWN"); changeShuttersLevel(STATE_DOWN); //state = DOWN; //sendState(); break; case V_STOP: //Serial.println(", New status: V_STOP"); shuttersHalt(); //state = IDLE; //sendState(); break; case V_PERCENTAGE: //Serial.println(", New status: V_PERCENTAGE"); // if (!initial_state_sent) { // #ifdef MY_DEBUG // Serial.println("Receiving initial value from controller"); // #endif // initial_state_sent = true; // } int per = message.getInt(); if (per > STATE_UP) { per = STATE_UP; } changeShuttersLevel(per); //InitShutters(message.getInt());//send value < 0 or > 100 to calibrate //sendState(); break; } } else if (message.sensor == CHILD_ID_SET) { if (message.type == V_VAR1) { Serial.println(", New status: V_VAR1, with payload: "); String strRollTime = message.getString(); rollTime = strRollTime.toFloat(); Serial.println("rolltime value: "); Serial.println(String(rollTime)); saveState(CHILD_ID_SET, rollTime); } } #ifdef MY_DEBUG Serial.println("exiting incoming message"); #endif return; } void before() { // Setup the button pinMode(BUTTON_UP_PIN, INPUT_PULLUP); // Activate internal pull-up digitalWrite(BUTTON_UP_PIN, HIGH); //attachInterrupt(digitalPinToInterrupt(BUTTON_UP_PIN), upButtonPress, RISING); pinMode(BUTTON_DOWN_PIN, INPUT_PULLUP); // Activate internal pull-up digitalWrite(BUTTON_DOWN_PIN, HIGH); // attachInterrupt(digitalPinToInterrupt(BUTTON_DOWN_PIN), downButtonPress, RISING); //pinMode(BUTTON_STOP_PIN, INPUT_PULLUP); // Activate internal pull-up //digitalWrite(BUTTON_STOP_PIN, HIGH); // After setting up the button, setup debouncer debouncerUp.attach(BUTTON_UP_PIN); debouncerUp.interval(5); // After setting up the button, setup debouncer debouncerDown.attach(BUTTON_DOWN_PIN); debouncerDown.interval(5); // After setting up the button, setup debouncer // debouncerStop.attach(BUTTON_UP_PIN&&BUTTON_UP_PIN); // debouncerStop.interval(5); // Make sure relays are off when starting up digitalWrite(RELAY_UP_PIN, RELAY_OFF); // Then set relay pins in output mode pinMode(RELAY_UP_PIN, OUTPUT); // Make sure relays are off when starting up digitalWrite(RELAY_DOWN_PIN, RELAY_OFF); // Then set relay pins in output mode pinMode(RELAY_DOWN_PIN, OUTPUT); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo(SKETCH_NAME, SKETCH_VER); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_COVER, S_COVER, PRESENT_MESSAGE, IS_ACK); //present(CHILD_ID_SET, S_CUSTOM); } void setup(void) { //set up roll time if the saved value is not 255 Serial.println("getting rolltime from eeprom: "); float tmpRollTime = loadState(CHILD_ID_SET); if (tmpRollTime != 0xff) { rollTime = tmpRollTime; } Serial.println(String(rollTime)); int state = loadState(CHILD_ID_COVER); #ifdef MY_DEBUG Serial.println("getting state from eeprom: "); Serial.println(String(state)); #endif if (state == 0xff) { initShutters(); } else { changeShuttersLevel(state); } } void loop(void) { if (!initial_state_sent) { #ifdef MY_DEBUG Serial.println("Sending initial value"); #endif sendState(); // send(msgCode.set('20.0')); // #ifdef MY_DEBUG // Serial.println("Requesting initial value from controller"); // #endif // request(CHILD_ID_COVER, V_PERCENTAGE); // wait(2000, C_SET, V_PERCENTAGE); initial_state_sent = true; } debouncerUp.update(); value = debouncerUp.read(); if (value == 0 && value != oldValueUp) { changeShuttersLevel(STATE_UP); //state = UP; //sendState(); } oldValueUp = value; debouncerDown.update(); value = debouncerDown.read(); if (value == 0 && value != oldValueDown) { changeShuttersLevel(STATE_DOWN); //state = DOWN; //sendState(); } oldValueDown = value; // debouncerStop.update(); //value = debouncerStop.read(); //if (value == 0 && value !=( oldValueUp||oldValueDown)) { // debouncerDown.update(); // debouncerUp.update(); value = debouncerUp.rose(); if (value == 0 && value != oldValueStop){ shuttersHalt(); } oldValueStop = value; value = debouncerDown.rose(); if (value == 0 && value != oldValueStop1){ shuttersHalt(); } oldValueStop1 = value; if (isMoving) { unsigned long _now = millis(); if (_now - lastLevelTime >= timeOneLevel * 1000) { if (directionUpDown == DIRECTION_UP) { currentShutterLevel += 1; } else { currentShutterLevel -= 1; } #ifdef MY_DEBUG //Serial.println(String(requestedShutterLevel)); Serial.println(String(currentShutterLevel)); #endif lastLevelTime = millis(); //send(msgPercentage.set(currentShutterLevel)); } if (currentShutterLevel == requestedShutterLevel){ //if ((currentShutterLevel == requestedShutterLevel) || (digitalRead(((RELAY_UP_PIN) ==1) &&(RELAY_DOWN_PIN) ==1))) { shuttersHalt(); } } else if (requestedShutterLevel != currentShutterLevel) { if (requestedShutterLevel > currentShutterLevel) { shuttersUp(); } else { shuttersDown(); } lastLevelTime = millis(); } }what am i missing? thank you .
i'm a arduino fan .Even sometimes don't undestanding how to use it :P
-
hello. I'm building and remake of Simple cover actuator from @dpressle (here), i call it a remake because my shutter have 2 relays ,one for UP and 1 for Down(not power and direction like original one)
and i'm having problems to make it work like "blind percentage" switch type on Domoticz.
i read that they were not supported 4 years ago but i think it was already corrected.Right?
picture above its what i got on domoticz, up,down and stop works,but percentage its buggy ,not respond, and status its always closed,even when windows it' full open(full up).my edited code
// Enable debug prints to serial monitor #define MY_DEBUG // Enable and select radio type attached #define MY_RADIO_RFM69 //#define MY_RF24_PA_LEVEL RF24_PA_LOW //#define MY_REPEATER_FEATURE #include <Bounce2.h> #include <MySensors.h> #include <SPI.h> // uncomment if we want to manually assign an ID //#define MY_NODE_ID 1 / #define BUTTON_UP_PIN 5 // Arduino Digital I/O pin number for up button #define BUTTON_DOWN_PIN 6 // Arduino Digital I/O pin number for down button //#define BUTTON_STOP_PIN 7 // Arduino Digital I/O pin number for stop button #define RELAY_UP_PIN 3 // Arduino Digital I/O pin number for direction relay #define RELAY_DOWN_PIN 4 // Arduino Digital I/O pin number for power relay #define RELAY_ON 0 #define RELAY_OFF 1 //#define RELAY_DOWN 1 //#define RELAY_UP 0 #define DIRECTION_DOWN 1 #define DIRECTION_UP 0 #define SKETCH_NAME "Cover" #define SKETCH_VER "2.0" #define CHILD_ID_COVER 0 // sensor Id of the sensor child #define STATE_UP 100 // 100 is open - up #define STATE_DOWN 0 // 0 is closed - down //#define CHILD_ID_CALIBRATE 1 // sensor Id of the sensor child to calibrate #define CHILD_ID_SET 1 // sensor Id of the sensor child to init the roll time #define PRESENT_MESSAGE "shuttle for Livingroom" const int LEVELS = 100; //the number of levels float rollTime = 28.0; //the overall rolling time of the shutter const bool IS_ACK = false; //is to acknowlage static bool initial_state_sent = false;//for hass we need at list one state send at begining // debouncing parameters int value = 0; int oldValueUp = 0; int oldValueDown = 0; //int value1=0;int value2=0; int oldValueStop=0; int oldValueStop1=0; //static unsigned long last_interrupt_time_up = 0; //static unsigned long last_interrupt_time_down = 0; //static unsigned long debounce_time = 200; Bounce debouncerUp = Bounce(); Bounce debouncerDown = Bounce(); //Bounce debouncerStop = Bounce(); // shutter position parameters float timeOneLevel = rollTime / LEVELS; int requestedShutterLevel = 0; int currentShutterLevel = 0; unsigned long lastLevelTime = 0; bool isMoving = false; int directionUpDown; enum CoverState { STOP, UP, // Window covering. Up. DOWN, // Window covering. Down. }; static int coverState = STOP; MyMessage msgUP(CHILD_ID_COVER, V_UP); MyMessage msgDown(CHILD_ID_COVER, V_DOWN); MyMessage msgStop(CHILD_ID_COVER, V_STOP); MyMessage msgPercentage(CHILD_ID_COVER, V_PERCENTAGE); //MyMessage msgCode(CHILD_ID_SET, V_IR_SEND); void sendState() { // Send current state and status to gateway. send(msgUP.set(coverState == UP)); send(msgDown.set(coverState == DOWN)); send(msgStop.set(coverState == STOP)); send(msgPercentage.set(currentShutterLevel)); } void shuttersUp(void) { #ifdef MY_DEBUG Serial.println("Shutters going up"); #endif if (digitalRead(RELAY_DOWN_PIN) == RELAY_ON) { digitalWrite(RELAY_DOWN_PIN, RELAY_OFF); delay(20); } digitalWrite(RELAY_UP_PIN, RELAY_ON); directionUpDown = DIRECTION_UP; isMoving = true; coverState = UP; sendState(); } void shuttersDown(void) { #ifdef MY_DEBUG Serial.println("Shutters going down"); #endif if (digitalRead(RELAY_UP_PIN) == RELAY_ON) { digitalWrite(RELAY_UP_PIN, RELAY_OFF); delay(20); } digitalWrite(RELAY_DOWN_PIN, RELAY_ON); directionUpDown = DIRECTION_DOWN; isMoving = true; coverState = DOWN; sendState(); } void shuttersHalt(void) { #ifdef MY_DEBUG Serial.println("Shutters halted X"); #endif // Serial.println("2 BOTOES OFF"); // if (digitalRead((RELAY_UP_PIN) || (RELAY_DOWN_PIN) )== RELAY_ON) { digitalWrite(RELAY_UP_PIN, RELAY_OFF); digitalWrite(RELAY_DOWN_PIN, RELAY_OFF); delay(20); //} isMoving = false; requestedShutterLevel = currentShutterLevel; #ifdef MY_DEBUG Serial.println("saving state to: "); Serial.println(String(currentShutterLevel)); #endif saveState(CHILD_ID_COVER, currentShutterLevel); coverState = STOP; //sendState(); } void changeShuttersLevel(int level) { int dir = (level > currentShutterLevel) ? DIRECTION_UP : DIRECTION_DOWN; if (isMoving && dir != directionUpDown) { shuttersHalt(); } requestedShutterLevel = level; } void initShutters() { #ifdef MY_DEBUG Serial.println("Init Cover"); #endif shuttersUp(); delay((rollTime + timeOneLevel * LEVELS) * 1000); currentShutterLevel = STATE_UP; requestedShutterLevel = currentShutterLevel; } void receive(const MyMessage &message) { #ifdef MY_DEBUG Serial.println("recieved incomming message"); Serial.println("Recieved message for sensor: "); Serial.println(String(message.sensor)); Serial.println("Recieved message with type: "); Serial.println(String(message.type)); #endif if (message.sensor == CHILD_ID_COVER) { switch (message.type) { case V_UP: //Serial.println(", New status: V_UP"); changeShuttersLevel(STATE_UP); //state = UP; //sendState(); break; case V_DOWN: //Serial.println(", New status: V_DOWN"); changeShuttersLevel(STATE_DOWN); //state = DOWN; //sendState(); break; case V_STOP: //Serial.println(", New status: V_STOP"); shuttersHalt(); //state = IDLE; //sendState(); break; case V_PERCENTAGE: //Serial.println(", New status: V_PERCENTAGE"); // if (!initial_state_sent) { // #ifdef MY_DEBUG // Serial.println("Receiving initial value from controller"); // #endif // initial_state_sent = true; // } int per = message.getInt(); if (per > STATE_UP) { per = STATE_UP; } changeShuttersLevel(per); //InitShutters(message.getInt());//send value < 0 or > 100 to calibrate //sendState(); break; } } else if (message.sensor == CHILD_ID_SET) { if (message.type == V_VAR1) { Serial.println(", New status: V_VAR1, with payload: "); String strRollTime = message.getString(); rollTime = strRollTime.toFloat(); Serial.println("rolltime value: "); Serial.println(String(rollTime)); saveState(CHILD_ID_SET, rollTime); } } #ifdef MY_DEBUG Serial.println("exiting incoming message"); #endif return; } void before() { // Setup the button pinMode(BUTTON_UP_PIN, INPUT_PULLUP); // Activate internal pull-up digitalWrite(BUTTON_UP_PIN, HIGH); //attachInterrupt(digitalPinToInterrupt(BUTTON_UP_PIN), upButtonPress, RISING); pinMode(BUTTON_DOWN_PIN, INPUT_PULLUP); // Activate internal pull-up digitalWrite(BUTTON_DOWN_PIN, HIGH); // attachInterrupt(digitalPinToInterrupt(BUTTON_DOWN_PIN), downButtonPress, RISING); //pinMode(BUTTON_STOP_PIN, INPUT_PULLUP); // Activate internal pull-up //digitalWrite(BUTTON_STOP_PIN, HIGH); // After setting up the button, setup debouncer debouncerUp.attach(BUTTON_UP_PIN); debouncerUp.interval(5); // After setting up the button, setup debouncer debouncerDown.attach(BUTTON_DOWN_PIN); debouncerDown.interval(5); // After setting up the button, setup debouncer // debouncerStop.attach(BUTTON_UP_PIN&&BUTTON_UP_PIN); // debouncerStop.interval(5); // Make sure relays are off when starting up digitalWrite(RELAY_UP_PIN, RELAY_OFF); // Then set relay pins in output mode pinMode(RELAY_UP_PIN, OUTPUT); // Make sure relays are off when starting up digitalWrite(RELAY_DOWN_PIN, RELAY_OFF); // Then set relay pins in output mode pinMode(RELAY_DOWN_PIN, OUTPUT); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo(SKETCH_NAME, SKETCH_VER); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID_COVER, S_COVER, PRESENT_MESSAGE, IS_ACK); //present(CHILD_ID_SET, S_CUSTOM); } void setup(void) { //set up roll time if the saved value is not 255 Serial.println("getting rolltime from eeprom: "); float tmpRollTime = loadState(CHILD_ID_SET); if (tmpRollTime != 0xff) { rollTime = tmpRollTime; } Serial.println(String(rollTime)); int state = loadState(CHILD_ID_COVER); #ifdef MY_DEBUG Serial.println("getting state from eeprom: "); Serial.println(String(state)); #endif if (state == 0xff) { initShutters(); } else { changeShuttersLevel(state); } } void loop(void) { if (!initial_state_sent) { #ifdef MY_DEBUG Serial.println("Sending initial value"); #endif sendState(); // send(msgCode.set('20.0')); // #ifdef MY_DEBUG // Serial.println("Requesting initial value from controller"); // #endif // request(CHILD_ID_COVER, V_PERCENTAGE); // wait(2000, C_SET, V_PERCENTAGE); initial_state_sent = true; } debouncerUp.update(); value = debouncerUp.read(); if (value == 0 && value != oldValueUp) { changeShuttersLevel(STATE_UP); //state = UP; //sendState(); } oldValueUp = value; debouncerDown.update(); value = debouncerDown.read(); if (value == 0 && value != oldValueDown) { changeShuttersLevel(STATE_DOWN); //state = DOWN; //sendState(); } oldValueDown = value; // debouncerStop.update(); //value = debouncerStop.read(); //if (value == 0 && value !=( oldValueUp||oldValueDown)) { // debouncerDown.update(); // debouncerUp.update(); value = debouncerUp.rose(); if (value == 0 && value != oldValueStop){ shuttersHalt(); } oldValueStop = value; value = debouncerDown.rose(); if (value == 0 && value != oldValueStop1){ shuttersHalt(); } oldValueStop1 = value; if (isMoving) { unsigned long _now = millis(); if (_now - lastLevelTime >= timeOneLevel * 1000) { if (directionUpDown == DIRECTION_UP) { currentShutterLevel += 1; } else { currentShutterLevel -= 1; } #ifdef MY_DEBUG //Serial.println(String(requestedShutterLevel)); Serial.println(String(currentShutterLevel)); #endif lastLevelTime = millis(); //send(msgPercentage.set(currentShutterLevel)); } if (currentShutterLevel == requestedShutterLevel){ //if ((currentShutterLevel == requestedShutterLevel) || (digitalRead(((RELAY_UP_PIN) ==1) &&(RELAY_DOWN_PIN) ==1))) { shuttersHalt(); } } else if (requestedShutterLevel != currentShutterLevel) { if (requestedShutterLevel > currentShutterLevel) { shuttersUp(); } else { shuttersDown(); } lastLevelTime = millis(); } }what am i missing? thank you .
-
thank you for reply @mfalkvidd
Payload like 100 shoud be 100% on domoticz, right? how does domoticz "know" that a blindcover /or shutter is open or close? because it's not respondig to that...__ __ ____ | \/ |_ _/ ___| ___ _ __ ___ ___ _ __ ___ | |\/| | | | \___ \ / _ \ `_ \/ __|/ _ \| `__/ __| | | | | |_| |___| | __/ | | \__ \ _ | | \__ \ |_| |_|\__, |____/ \___|_| |_|___/\___/|_| |___/ |___/ 2.3.1 16 MCO:BGN:INIT NODE,CP=RRNNA---,REL=255,VER=2.3.1 26 MCO:BGN:BFR 28 TSM:INIT 30 TSF:WUR:MS=0 34 TSM:INIT:TSP OK 34 TSF:SID:OK,ID=4 36 TSM:FPAR 1257 TSF:MSG:SEND,4-4-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 1423 TSF:MSG:READ,0-0-4,s=255,c=3,t=8,pt=1,l=1,sg=0:0 1429 TSF:MSG:FPAR OK,ID=0,D=1 3264 TSM:FPAR:OK 3264 TSM:ID 3266 TSM:ID:OK 3268 TSM:UPL 3276 TSF:MSG:SEND,4-4-0-0,s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=OK:1 3315 TSF:MSG:READ,0-0-4,s=255,c=3,t=25,pt=1,l=1,sg=0:1 3321 TSF:MSG:PONG RECV,HP=1 3325 TSM:UPL:OK 3328 TSM:READY:ID=4,PAR=0,DIS=1 3540 TSF:MSG:SEND,4-4-0-0,s=255,c=3,t=15,pt=6,l=2,sg=0,ft=0,st=OK:0100 3567 TSF:MSG:READ,0-0-4,s=255,c=3,t=15,pt=6,l=2,sg=0:0100 3786 TSF:MSG:SEND,4-4-0-0,s=255,c=0,t=17,pt=0,l=5,sg=0,ft=0,st=OK:2.3.1 4005 TSF:MSG:SEND,4-4-0-0,s=255,c=3,t=6,pt=1,l=1,sg=0,ft=0,st=OK:0 4046 TSF:MSG:READ,0-0-4,s=255,c=3,t=6,pt=0,l=1,sg=0:M 4263 TSF:MSG:SEND,4-4-0-0,s=255,c=3,t=11,pt=0,l=5,sg=0,ft=0,st=OK:Cover 4483 TSF:MSG:SEND,4-4-0-0,s=255,c=3,t=12,pt=0,l=3,sg=0,ft=0,st=OK:2.0 4708 TSF:MSG:SEND,4-4-0-0,s=0,c=0,t=5,pt=0,l=22,sg=0,ft=0,st=OK:shuttle for Livingroom 4716 MCO:REG:REQ 4929 TSF:MSG:SEND,4-4-0-0,s=255,c=3,t=26,pt=1,l=1,sg=0,ft=0,st=OK:2 4956 TSF:MSG:READ,0-0-4,s=255,c=3,t=27,pt=1,l=1,sg=0:1 4962 MCO:PIM:NODE REG=1 4964 MCO:BGN:STP getting rolltime from eeprom: 28.00 getting state from eeprom: 0 4968 MCO:BGN:INIT OK,TSP=1 Sending initial value 5185 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=29,pt=1,l=1,sg=0,ft=0,st=OK:0 5402 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=30,pt=1,l=1,sg=0,ft=0,st=OK:0 5619 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=31,pt=1,l=1,sg=0,ft=0,st=OK:1 5838 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=3,pt=2,l=2,sg=0,ft=0,st=OK:0.
.
.
.
after I give an order of CLOSE (DOWN) shutter (v_percentage=0)------------ *(HERE WAS AT 100% AND I ORDER TO GO 0%(CLOSED)* ------------------- exiting incoming message Shutters going down 612509 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=29,pt=1,l=1,sg=0,ft=0,st=OK:0 612728 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=30,pt=1,l=1,sg=0,ft=0,st=OK:1 612947 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=31,pt=1,l=1,sg=0,ft=0,st=OK:0 613167 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=3,pt=2,l=2,sg=0,ft=0,st=OK:100 99 98 (...) 7 6 5 4 3 2 1 0 Shutters halted X saving state to: 0 645519 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=29,pt=1,l=1,sg=0,ft=0,st=OK:0 645738 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=30,pt=1,l=1,sg=0,ft=0,st=OK:0 645957 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=31,pt=1,l=1,sg=0,ft=0,st=OK:1 646176 TSF:MSG:SEND,4-4-0-0,s=0,c=1,t=3,pt=2,l=2,sg=0,ft=0,st=OK:0 ------------ *(HERE REACH 0%)* ------------------- -
so, i assume that my question it's not obvious and because that domoticz still have this bug...
i will leave it without percentage bar(just as blind) because its just to opena and close that shutter at night/morningnobody have an sensor with S_COVER presented on Domoticz working good?
-
I have similar problem. Some time ago I even wrote a nice piece of code to update roller shutter position if changed from buttons. But domoticz just does not seem to understand values the sensor sends. So I confirm, blinds percentage is buggy.
-
Old thread, I know. Anybody know if this was ever fixed? I can get by with just open/close but percentage would be extra snazzy.
I'm using a 12V dc motor and microswitches at limit points. The blind is just SO heavy/dragging that I had to get a beefy DC motor. The apparatus moves nicely. Just the control circuitry to do.
-
Bumping an old thread.
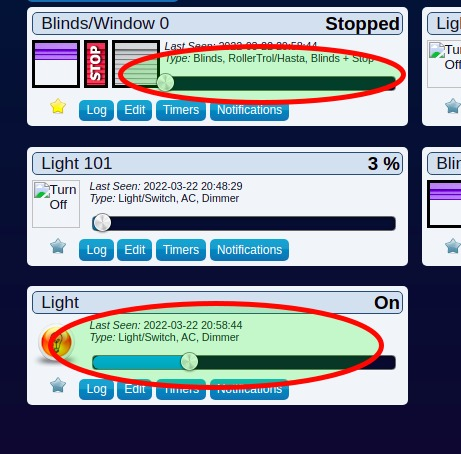
It looks like domoticz is detecting two device types with the same unit ID - blinds and lights.
V_PERCENTAGE values send from the device to domoticz updates the Light/Switch value. It also works the other way around - changing the light type device to dimmer and updating the dim value - sends V_PERCENTAGE command to mySensors which effectively targets the cover (as they have the same unit ID).
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login