nRf24L01+ connection quality meter
-
A little frustrated by radio's showing inconsistent behaviour I built a simple connection quality meter with a leftover of a previous project.
Not too complicated
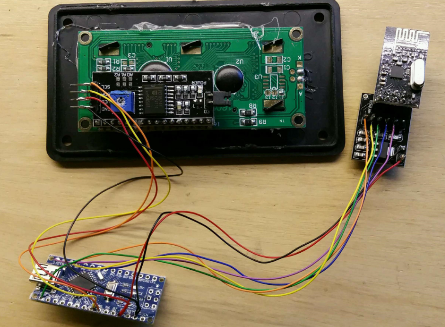
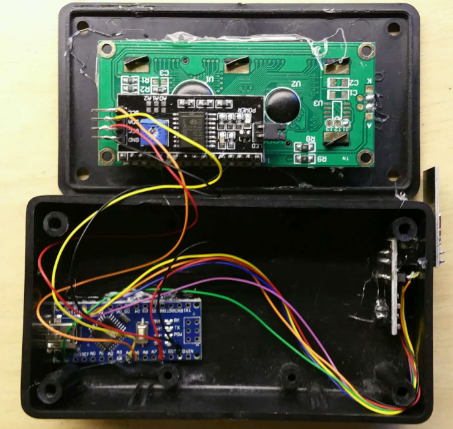
") a nano, I2C lcd display, radio adapter board (guarantees a stable power supply for the radio) and the radio to be tested.
a nano, I2C lcd display, radio adapter board (guarantees a stable power supply for the radio) and the radio to be tested.a little hot glue and it fits nicely in the box. The radio can be swapped on the outside. Power comes in from a power bank connected to the nano USB so that I can walk around the house.
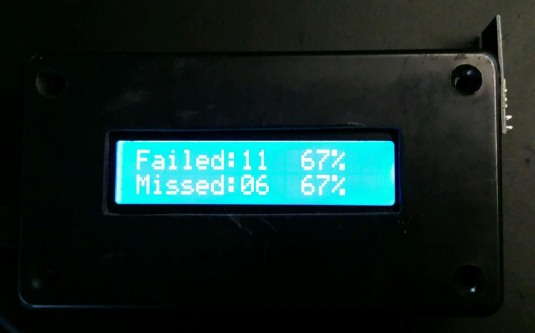
The sketch sends values from 0..99 to a gateway with "ack" enabled. The LCD shows the "failed" sends and the number of not acknowledged messages. i.e. the messages which did not arrive at the gateway or did not make it on their return flight.
It now takes less than a minute to sort the radio's :bowtie:
-
@AWI is that hardware ack or software ack? (The MySensors ack confusion is driving me insane)
-
Nice and very useful, also to test if there is signal in a special area in your house.
Can you put the code here?
-
@AWI
Thanks for the idea! This can become very useful in deciding at which locations a repeater can be used to solve my coverage problem. In my setup I'm facing difficulties getting the signal through a glass pane at the rear of my house.
Same question as @flopp: putting the code in here would be very usefulThanks,
Boozz
-
@mfalkvidd my interpretation and based on experience:
- fail (hardware ack..) is the node to node acknowledgement. (i.e. from node to repeater or gateway). Can not be switched on/off from the API. This is the return value from the send() function (or gw.send()). If a fail occurs the node tries multiple times to resend (this can take quitte a lot of time..) This acknowledgement is only from the next node in line.
- missed (software ack) is the node to destination acknowledgement (i.e. node - repeater - gateway) . Can (and should) be enabled in the send() function. The acknowledgement is send automatically by the destination node in the form of an "echo" of the message sent. No automatic resend happens. Eventual action should be taken by the sender (controller / sketch in node).
The "connection quality meter" measures the number of fails and averages this for 100 samples (percentate) and similar for not acknowledged "software ack's".
Ik will post the sketch later today..
-
The sketch for the connection quality meter.
/* PROJECT: MySensors / Quality of radio transmission PROGRAMMER: AWI (MySensors libraries) DATE: 20160529/ last update: 20160530 FILE: AWI_Send.ino LICENSE: Public domain Hardware: ATMega328p board w/ NRF24l01 and MySensors 2.0 (Development) Special: Summary: Sends a radio message with counter each x time to determine fault ratio with receiver Remarks: Fixed node-id & communication channel to other fixed node Change log: 20160530 - added moving average on fail/ miss count */ //**** MySensors ***** // Enable debug prints to serial monitor #define MY_DEBUG #define MY_RADIO_NRF24 // Enable and select radio type attached #define MY_RF24_CHANNEL 80 // radio channel, default = 76 #define MY_NODE_ID 250 #define NODE_TXT "Q 250" // Text to add to sensor name // #define MY_RF24_CE_PIN 7 // Ceech board, 3.3v (7,8) (pin default 9,10) // #define MY_RF24_CS_PIN 8 #define DESTINATION_NODE 0 // receiving fixed node id (default 0 = gateway) #include <SPI.h> #include <MySensor.h> // display #include <Wire.h> // I2C #include <LiquidCrystal_I2C.h> // LCD display with I2C interface // helpers #define LOCAL_DEBUG #ifdef LOCAL_DEBUG #define Sprint(a) (Serial.print(a)) // macro as substitute for print, enable if no print wanted #define Sprintln(a) (Serial.println(a)) // macro as substitute for println #else #define Sprint(a) // enable if no print wanted -or- #define Sprintln(a) // enable if no print wanted #endif // MySensors sensor #define counterChild 0 // send constants and variables int messageCounter = 0 ; const int messageCounterMax = 100 ; // maximum message counter value const unsigned counterUpdateDelay = 100 ; // send every x ms and sleep in between // receive constants and variables boolean failStore[messageCounterMax] ; // moving average stores & pointers int failStorePointer = 0 ; boolean missedStore[messageCounterMax] ; int missedStorePointer = 0 ; int newMessage = 0 ; int lastMessage = -1 ; int missedMessageCounter = 0 ; // total number of messages in range (messageCounterMax) int failMessageCounter = 0 ; // total number of messages in range (messageCounterMax) // Loop delays const unsigned long displayInterval = 1000UL ; // display update in ms unsigned long lastDisplayUpdate = 0 ; // last update for loop timers // standard messages MyMessage counterMsg(counterChild, V_PERCENTAGE); // Send value // ***** LCD LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address void setup() { Wire.begin(); // I2C // ** LCD display ** // LCD 2 lines * 16 char. lcd.begin(16, 2); lcd.setBacklight(HIGH); lcd.setCursor(0, 0); lcd.print("AWI Quality nRF24"); for(int i= 0 ; i < messageCounterMax ; i++){ // init stores for moving averages failStore[i] = true ; missedStore[i] = true ; } missedStorePointer = failStorePointer = 0 ; delay(1000); } void presentation(){ // MySensors present(counterChild, S_DIMMER, "Quality counter " NODE_TXT) ; // counter uses percentage from dimmer value } void loop() { // Sprint("count:") ; Sprintln(messageCounter) ; LCD_local_display(); missedStore[failStorePointer] = false ; // set slot to false (ack message needs to set) ; boolean succes = failStore[failStorePointer] = send(counterMsg.setDestination(DESTINATION_NODE).set(failStorePointer), true); // send to destination with ack if (!succes){ failMessageCounter++ ; Sprint("Fail on message: ") ; Sprint(failStorePointer) ; Sprint(" # ") ; Sprintln(failMessageCounter); } failStorePointer++ ; if(failStorePointer >= messageCounterMax){ failStorePointer = 0 ; // wrap counter } wait(counterUpdateDelay) ; // wait for things to settle and ack's to arrive } void receive(const MyMessage &message) { // Expect few types of messages from controller newMessage = message.getInt(); // get received value switch (message.type){ case V_PERCENTAGE: missedStore[newMessage] = true ; // set corresponding flag to received. if (newMessage > lastMessage){ // number of messages missed from lastMessage (kind of, faulty at wrap) Sprint("Missed messages: ") ; Sprintln( newMessage - lastMessage - 1) ; missedMessageCounter += newMessage - lastMessage - 1 ; } lastMessage = newMessage ; break ; default: break ; } } // calculate number of false values in array // takes a lot of time, but who cares... int getCount(boolean countArray[], int size){ int falseCount = 0 ; for (int i = 0 ; i < size ; i++){ falseCount += countArray[i]?0:1 ; } return falseCount ; } void LCD_local_display(void){ /* prints all available variables on LCD display with units */ char buf[17]; // buffer for max 16 char display lcd.setCursor(0, 0); snprintf(buf, sizeof buf, "Failed:%4d %3d%%", failMessageCounter, getCount(failStore, messageCounterMax)); lcd.print(buf); lcd.setCursor(0, 1); snprintf(buf, sizeof buf, "Missed:%4d %3d%%", missedMessageCounter, getCount(missedStore, messageCounterMax)); lcd.print(buf); }
-
Thnx!

-
I have been walking through and around the house with the meter to find the best radio solutions. So far I have the best reach with the nRF24L01+PA+LNA with the plastic/ aluminum foil (the ugly fix ;-), credits @Oitzu).
b.t.w. I added "parent" and "destination" node to the display to show where the meter is connected to. Destination is fixed in the sketch but the "parent" will change if the meter connects to another node (i.e. repeater)
To give you a real life impression . The transmitter (also nRF24L01+PA+LNA) is where the red arrow is behind two thick brick walls and a few trees. So, unless you live in a big mansion this should be sufficient range. Open field performance would be much better.
For the rest of the tests I had a large variance in results. Some general observations:
-
nRF24L01+PA+LNA without the "shielding" is pretty similar (and sometimes even worse) than the standard radio with the pcb antenna.
-
all nRF24L01+ in SMD version have a comparable performance to the standard ones
-
The standard radio's I have tested with a silk screen (white lines) and pin designation print on the back seem to be fine.
-
The (around 18) radio's is have tested without silk screen (3 different batches) are either "bad" performers (few meters) or don't perform at all. ( I noticed earlier and already put them apart. I was able to sort out 6 that can be used for short distance.).
-
I don;t have any "blob" samples..
I know this is far from scientific proof, but hope it gives you some guidance..
-
-
@AWI there also 2 versions of the PA/LNA Modules out there. Which one do you tested?
-
@AWI said:
The standard radio's I have tested with a silk screen (white lines) and pin designation print on the back seem to be fine
In the picture, these radios have the notorious 1242AF datecode on the chip (if you didn't take the pictures yourself, do you have the same date code?). I also have a batch of these and they perform very well!
-
Thanks @awi for this, might have to build one myself to test a potential bad batch of radios i have.
Do you need the LCD for this or is the data also print in serial?
Thanks,
-
@drock1985 It will print the data on serial but not very well formatted. You don't need the LCD but it is easy to carry around the house. (a laptop too
 but be aware of disturbances coming from the laptop i.e. Wifi ) I thought off blinking led's also. You can easily change the sketch, there is not much to it..
but be aware of disturbances coming from the laptop i.e. Wifi ) I thought off blinking led's also. You can easily change the sketch, there is not much to it..
-
@Oitzu which versions do you relate to? I also have some with ceramic antenna (smd connection)
-
-
@boozz my neighbors ask me every two weeks what I am doing and what all those strange looking things in my garden and on my roof are...

-
And when you start explaining they look somewhat odd don't they?
-
I'm having a problem in this part off the code:
"present(counterChild, S_DIMMER, "Quality counter " NODE_TXT) ; // counter uses percentage from dimmer value"I'm getting this error:
"exit status 1
'present' was not declared in this scope"How can i fix this ?
-
@mrc-core sounds like you are using the stable (1.5.x) version of MySensors. This sketch requires the development version which is available on github
-
Thanks for the quick reply.
i'm going to change the versions")
-
Can this be extended to also measure NRF24l01 standby current? Maybe some "fake" modules have a high current consumption in stadnby mode, this could drain batteries quickly when used in battery operated devices
-
Hi @AWI, could you kindly post your updated version of the sketch that has the parent and destination node numbers on the display?
-
@cjrpriest Here you go..
/* PROJECT: MySensors / Quality of radio transmission PROGRAMMER: AWI (MySensors libraries) DATE: 20160529/ last update: 20160530 FILE: AWI_Send.ino LICENSE: Public domain Hardware: ATMega328p board w/ NRF24l01 and MySensors 2.0 Special: Summary: Sends a radio message with counter each x time to determine fault ratio with receiver Remarks: Fixed node-id & communication channel to other fixed node Change log: 20160530 - added moving average on fail/ miss count, update to 2.0 */ //**** MySensors ***** // Enable debug prints to serial monitor #define MY_DEBUG #define MY_RADIO_NRF24 // Enable and select radio type attached //#define MY_RF24_CHANNEL 80 // radio channel, default = 76 #define MY_NODE_ID 250 #define NODE_TXT "Q 250" // Text to add to sensor name //#define MY_PARENT_NODE_ID 42 // fixed parent to controller when 0 (else comment out = AUTO) // #define MY_RF24_CE_PIN 7 // Ceech board, 3.3v (7,8) (pin default 9,10) // #define MY_RF24_CS_PIN 8 #define DESTINATION_NODE 0 // receiving fixed node id (default 0 = gateway) #include <SPI.h> #include <MySensors.h> // display #include <Wire.h> // I2C #include <LiquidCrystal_I2C.h> // LCD display with I2C interface // helpers #define LOCAL_DEBUG #ifdef LOCAL_DEBUG #define Sprint(a) (Serial.print(a)) // macro as substitute for print, enable if no print wanted #define Sprintln(a) (Serial.println(a)) // macro as substitute for println #else #define Sprint(a) // enable if no print wanted -or- #define Sprintln(a) // enable if no print wanted #endif // MySensors sensor #define counterChild 0 // send constants and variables int messageCounter = 0 ; const int messageCounterMax = 100 ; // maximum message counter value const unsigned counterUpdateDelay = 500 ; // send every x ms and sleep in between // receive constants and variables boolean failStore[messageCounterMax] ; // moving average stores & pointers int failStorePointer = 0 ; boolean missedStore[messageCounterMax] ; int missedStorePointer = 0 ; int newMessage = 0 ; int lastMessage = -1 ; int missedMessageCounter = 0 ; // total number of messages in range (messageCounterMax) int failMessageCounter = 0 ; // total number of messages in range (messageCounterMax) uint8_t parent = 0 ; // parent node-id // Loop delays const unsigned long displayInterval = 1000UL ; // display update in ms unsigned long lastDisplayUpdate = 0 ; // last update for loop timers // standard messages MyMessage counterMsg(counterChild, V_PERCENTAGE); // Send value // ***** LCD //LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address LiquidCrystal_I2C lcd(0x27, 16, 2); // Set the LCD I2C address void setup() { Wire.begin(); // I2C // ** LCD display ** // LCD 2 lines * 16 char. lcd.begin(16, 2); lcd.setBacklight(HIGH); lcd.setCursor(0, 0); lcd.print("AWI Quality nRF24"); for(int i= 0 ; i < messageCounterMax ; i++){ // init stores for moving averages failStore[i] = true ; missedStore[i] = true ; } missedStorePointer = failStorePointer = 0 ; delay(1000); } void presentation(){ // MySensors present(counterChild, S_DIMMER, "Quality counter " NODE_TXT) ; // counter uses percentage from dimmer value } void loop() { // Sprint("count:") ; Sprintln(messageCounter) ; LCD_local_display(); missedStore[failStorePointer] = false ; // set slot to false (ack message needs to set) ; boolean succes = failStore[failStorePointer] = send(counterMsg.setDestination(DESTINATION_NODE).set(failStorePointer), true); // send to destination with ack if (!succes){ failMessageCounter++ ; Sprint("Fail on message: ") ; Sprint(failStorePointer) ; Sprint(" # ") ; Sprintln(failMessageCounter); } failStorePointer++ ; if(failStorePointer >= messageCounterMax){ failStorePointer = 0 ; // wrap counter } parent = getParentNodeId(); // get the parent node (0 = gateway) wait(counterUpdateDelay) ; // wait for things to settle and ack's to arrive } void receive(const MyMessage &message) { // Expect few types of messages from controller newMessage = message.getInt(); // get received value switch (message.type){ case V_PERCENTAGE: missedStore[newMessage] = true ; // set corresponding flag to received. if (newMessage > lastMessage){ // number of messages missed from lastMessage (kind of, faulty at wrap) Sprint("Missed messages: ") ; Sprintln( newMessage - lastMessage - 1) ; missedMessageCounter += newMessage - lastMessage - 1 ; } lastMessage = newMessage ; break ; default: break ; } } // calculate number of false values in array // takes a lot of time, but who cares... int getCount(boolean countArray[], int size){ int falseCount = 0 ; for (int i = 0 ; i < size ; i++){ falseCount += countArray[i]?0:1 ; } return falseCount ; } void LCD_local_display(void){ /* prints all available variables on LCD display with units */ char buf[17]; // buffer for max 16 char display lcd.setCursor(0, 0); snprintf(buf, sizeof buf, "p%-3dFail%4d%3d%%", parent, failMessageCounter, getCount(failStore, messageCounterMax)); lcd.print(buf); lcd.setCursor(0, 1); snprintf(buf, sizeof buf, "d%-3dMiss%4d%3d%%", DESTINATION_NODE , missedMessageCounter, getCount(missedStore, messageCounterMax)); lcd.print(buf); }
-
Thanks very much @AWI
-
@AWI Strange, with the latest sketch I get
nrf-quality-meter.ino:88:34: error: invalid conversion from 'int' to 't_backlighPol' [-fpermissive]
In file included from nrf-quality-meter.ino:45:0:
C:\Dokumente und Einstellungen\Philipp\Eigene Dateien\Arduino\libraries\LiquidCrystal/LiquidCrystal_I2C.h:53:4: error: initializing argument 3 of 'LiquidCrystal_I2C::LiquidCrystal_I2C(uint8_t, uint8_t, t_backlighPol)' [-fpermissive]
LiquidCrystal_I2C (uint8_t lcd_Addr, uint8_t backlighPin, t_backlighPol pol);
^
invalid conversion from 'int' to 't_backlighPol' [-fpermissive]compiling...
It works using the other line...
// ***** LCD //LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address LiquidCrystal_I2C lcd(0x27, 16, 2); // Set the LCD I2C address
-
@karl261 probably I am using another library for the display. I got it from the Arduino library manager.
-
@AWI what is the board between the nano and the radio?
Something available via aliexpress?I really do not need this as I live in a small flat.. but I NEED THIS!

-
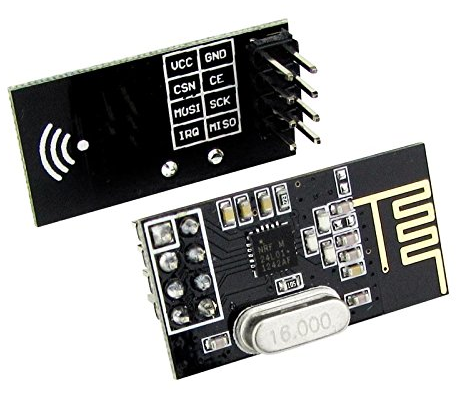
@Nicklas-Starkel you can find it in the MySensors shop It is a nrf24l01+ socket adapter board. It guarantees a stable supply and includes the famous "radio capacitor"
-
Hi @AWI,
thanks for the code and the project! ~~Unfortunately my biggest problem is to get my LCD working. It does not do anything with your code, other testcode to test the display is working fine. I am using this line and it should work fine:
LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C addressAny idea what else I could check? I am using arduino IDE 1.6.10
edit: getting this in the serial monitor of the device:
Starting sensor (RNNNA-, 2.0.0) TSM:INIT TSM:RADIO:OK TSP:ASSIGNID:OK (ID=250) TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSP:MSG:READ 3-3-255 s=255,c=3,t=7,pt=0,l=0,sg=0: TSP:MSG:BC !TSM:FPAR:FAIL !TSM:FAILURE TSM:PDTthen it starts over again...
~~
edit2:
Think I got it now, seems like my gateway wasn´t responding or whatever, now it seems to work...Edit3:
I got 1 fail and 5000 miss 60%...
Now what does this mean??Edit4:
I think I need some help: Most of the time I get this on my gw´s Serial Monitor:
0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=ok:0 0;255;3;0;9;TSP:MSG:READ 250-250-255 s=255,c=3,t=7,pt=0,l=0,sg=0: 0;255;3;0;9;TSP:MSG:BC 0;255;3;0;9;TSP:MSG:FPAR REQ (sender=250) 0;255;3;0;9;TSP:CHKUPL:OK (FLDCTRL) 0;255;3;0;9;TSP:MSG:GWL OK 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=ok:0 0;255;3;0;9;TSP:MSG:READ 250-250-255 s=255,c=3,t=7,pt=0,l=0,sg=0: 0;255;3;0;9;TSP:MSG:BC 0;255;3;0;9;TSP:MSG:FPAR REQ (sender=250) 0;255;3;0;9;TSP:CHKUPL:OK (FLDCTRL) 0;255;3;0;9;TSP:MSG:GWL OK 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=ok:0 0;255;3;0;9;TSP:MSG:READ 250-250-255 s=255,c=3,t=7,pt=0,l=0,sg=0: 0;255;3;0;9;TSP:MSG:BC 0;255;3;0;9;TSP:MSG:FPAR REQ (sender=250) 0;255;3;0;9;TSP:CHKUPL:OK 0;255;3;0;9;TSP:MSG:GWL OKAfter some reboots of the quality meter and I guess with a lot of luck it starts working occasionally
This is from the serial monitor of the quality meter:
TSP:MSG:READ 0-0-0 s=0,c=0,t=0,pt=0,l=0,sg=0: !TSP:MSG:PVER mismatch !TSM:FPAR:FAIL !TSM:FAILURE TSM:PDTI already added a 47u Cap and added those lines to the code:
#define MY_PARENT_NODE_ID 0 // fixed parent to controller when 0 (else comment out = AUTO) #define MY_PARENT_NODE_IS_STATICno luck at all...
edit5:
Now I opened the serial output of my GW again, which seems to started the communication:0;255;3;0;9;TSP:MSG:READ 250-250-255 s=255,c=3,t=7,pt=0,l=0,sg=0: 0;255;3;0;9;TSP:MSG:BC 0;255;3;0;9;TSP:MSG:FPAR REQ (sender=250) 0;255;3;0;9;TSP:CHKUPL:OK (FLDCTRL) 0;255;3;0;9;TSP:MSG:GWL OK 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=8,pt=1,l=1,sg=0,ft=0,st=ok:0 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=255,c=3,t=24,pt=1,l=1,sg=0:1 0;255;3;0;9;TSP:MSG:PINGED (ID=250, hops=1) 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=25,pt=1,l=1,sg=0,ft=0,st=ok:1 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=255,c=3,t=15,pt=6,l=2,sg=0:0100 0;255;3;0;9;!TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=15,pt=6,l=2,sg=0,ft=0,st=fail:0100 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=255,c=0,t=17,pt=0,l=5,sg=0:2.0.0 0;255;3;0;9;Sending message on topic: mygateway1-out/250/255/0/0/17 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=255,c=3,t=6,pt=1,l=1,sg=0:0 0;255;3;0;9;Sending message on topic: mygateway1-out/250/255/3/0/6 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=0,c=0,t=4,pt=0,l=21,sg=0:Quality counter Q 250 0;255;3;0;9;Sending message on topic: mygateway1-out/250/0/0/0/4 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=255,c=3,t=26,pt=1,l=1,sg=0:2 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=27,pt=1,l=1,sg=0,ft=0,st=ok:1 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=255,c=3,t=26,pt=1,l=1,sg=0:2 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=27,pt=1,l=1,sg=0,ft=0,st=ok:1 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=255,c=3,t=26,pt=1,l=1,sg=0:2 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=255,c=3,t=27,pt=1,l=1,sg=0,ft=0,st=ok:1 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=0,c=1,t=3,pt=2,l=2,sg=0:0 0;255;3;0;9;TSP:MSG:ACK msg 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=0,st=ok:0 0;255;3;0;9;Sending message on topic: mygateway1-out/250/0/1/0/3 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=0,c=1,t=3,pt=2,l=2,sg=0:1 0;255;3;0;9;TSP:MSG:ACK msg 0;255;3;0;9;TSP:MSG:SEND 0-0-250-250 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=0,st=ok:1 0;255;3;0;9;Sending message on topic: mygateway1-out/250/0/1/0/3 0;255;3;0;9;TSP:MSG:READ 250-250-0 s=0,c=1,t=3,pt=2,l=2,sg=0:2 0;255;3;0;9;TSP:MSG:ACK msgI don´t get it what is going on here. Restarted quality meter: blank LCD...

-
Great tool for a mysensors builder @AWI! I also want to sort out the good radios from the bad, I have enough trouble as it is trying to troubleshoot my questionable sensors.
I got around to building a quality meter for myself, although without the adapter board and with some additional differences. But I really don't understand the output, the fail and miss percentage is almost always 100 % for most of my radios. Am I missing something? Perhaps I should change some addresses to static ones? I thought that perhaps I had to define a corresponding item in Openhab in order for the packages to be acknowledged but this doesn't change the outcome.
Here's the serial output from the "quality meter":
Starting sensor (RNNNA-, 2.0.0) TSM:INIT TSM:RADIO:OK TSP:ASSIGNID:OK (ID=250) TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:MSG:READ 0-0-250 s=255,c=3,t=25,pt=1,l=1,sg=0:1 TSP:MSG:PONG RECV (hops=1) TSP:CHKUPL:OK TSM:UPL:OK TSM:READY !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=15,pt=6,l=2,sg=0,ft=1,st=fail:0100 !TSP:MSG:SEND 250-250-0-0 s=255,c=0,t=17,pt=0,l=5,sg=0,ft=2,st=fail:2.0.0 !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=6,pt=1,l=1,sg=0,ft=3,st=fail:0 TSP:MSG:READ 0-0-250 s=255,c=3,t=6,pt=0,l=1,sg=0:M !TSP:MSG:SEND 250-250-0-0 s=0,c=0,t=4,pt=0,l=21,sg=0,ft=4,st=fail:Quality counter Q 250 Request registration... !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=26,pt=1,l=1,sg=0,ft=5,st=fail:2 !TSM:UPL FAIL, SNP TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:MSG:READ 0-0-250 s=255,c=3,t=25,pt=1,l=1,sg=0:1 TSP:MSG:PONG RECV (hops=1) TSP:CHKUPL:OK TSM:UPL:OK TSM:READY !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=26,pt=1,l=1,sg=0,ft=1,st=fail:2 TSP:MSG:READ 0-0-250 s=255,c=3,t=27,pt=1,l=1,sg=0:1 Node registration=1 Init complete, id=250, parent=0, distance=1, registration=1 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=2,st=fail:0 Fail on message: 0 # 1 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:0 Missed messages: 0 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=3,st=fail:1 Fail on message: 1 # 2 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=4,st=fail:2 Fail on message: 2 # 3 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=5,st=fail:3 Fail on message: 3 # 4 !TSM:UPL FAIL, SNP TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:3 Missed messages: 2 !TSP:SEND:TNR Fail on message: 4 # 5 !TSP:SEND:TNR Fail on message: 5 # 6 !TSP:SEND:TNR Fail on message: 6 # 7 !TSP:SEND:TNR Fail on message: 7 # 8 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 8 # 9 !TSP:SEND:TNR Fail on message: 9 # 10 !TSP:SEND:TNR Fail on message: 10 # 11 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:MSG:READ 0-0-250 s=255,c=3,t=25,pt=1,l=1,sg=0:1 TSP:MSG:PONG RECV (hops=1) TSP:CHKUPL:OK TSM:UPL:OK TSM:READY !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=1,st=fail:11 Fail on message: 11 # 12 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:11 Missed messages: 7 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=2,st=fail:12 Fail on message: 12 # 13 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=3,st=fail:13 Fail on message: 13 # 14 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=4,st=fail:14 Fail on message: 14 # 15 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=5,st=fail:15 Fail on message: 15 # 16 !TSM:UPL FAIL, SNP TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 16 # 17 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 17 # 18 !TSP:SEND:TNR Fail on message: 18 # 19 !TSP:SEND:TNR Fail on message: 19 # 20 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:CHKUPL:FAIL (hops=255) !TSM:UPL:FAIL TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 20 # 21 !TSP:SEND:TNR Fail on message: 21 # 22 !TSP:SEND:TNR Fail on message: 22 # 23 !TSP:SEND:TNR Fail on message: 23 # 24 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 24 # 25 !TSP:SEND:TNR Fail on message: 25 # 26 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 26 # 27 !TSP:SEND:TNR Fail on message: 27 # 28 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:CHKUPL:FAIL (hops=255) !TSM:UPL:FAIL TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 28 # 29 !TSP:SEND:TNR Fail on message: 29 # 30 !TSP:SEND:TNR Fail on message: 30 # 31 !TSP:SEND:TNR Fail on message: 31 # 32 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 32 # 33 !TSP:SEND:TNR Fail on message: 33 # 34 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 34 # 35 !TSP:SEND:TNR Fail on message: 35 # 36 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:MSG:READ 0-0-250 s=255,c=3,t=25,pt=1,l=1,sg=0:1 TSP:MSG:PONG RECV (hops=1) TSP:CHKUPL:OK TSM:UPL:OK TSM:READY !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=1,st=fail:36 Fail on message: 36 # 37 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=2,st=fail:37 Fail on message: 37 # 38 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:37 Missed messages: 25 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=3,st=fail:38 Fail on message: 38 # 39 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:38 Missed messages: 0 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=4,st=fail:39 Fail on message: 39 # 40 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:39 Missed messages: 0 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=5,st=fail:40 Fail on message: 40 # 41 !TSM:UPL FAIL, SNP TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:40 Missed messages: 0 !TSP:SEND:TNR Fail on message: 41 # 42 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 42 # 43 !TSP:SEND:TNR Fail on message: 43 # 44 TSM:FPAR:OK TSM:ID !TSP:SEND:TNR Fail on message: 44 # 45 TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:MSG:READ 0-0-250 s=255,c=3,t=25,pt=1,l=1,sg=0:1 TSP:MSG:PONG RECV (hops=1) TSP:CHKUPL:OK TSM:UPL:OK TSM:READY !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=1,st=fail:45 Fail on message: 45 # 46 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:45 Missed messages: 4 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=2,st=fail:46 Fail on message: 46 # 47 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=3,st=fail:47 Fail on message: 47 # 48 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:47 Missed messages: 1 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=4,st=fail:48 Fail on message: 48 # 49 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:48 Missed messages: 0 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=5,st=fail:49 Fail on message: 49 # 50 !TSM:UPL FAIL, SNP TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 50 # 51 !TSP:SEND:TNR Fail on message: 51 # 52 !TSP:SEND:TNR Fail on message: 52 # 53 !TSP:SEND:TNR Fail on message: 53 # 54 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 54 # 55 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 55 # 56 !TSP:SEND:TNR Fail on message: 56 # 57 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:CHKUPL:FAIL (hops=255) !TSM:UPL:FAIL TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 57 # 58 !TSP:SEND:TNR Fail on message: 58 # 59 !TSP:SEND:TNR Fail on message: 59 # 60 !TSP:SEND:TNR Fail on message: 60 # 61 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 61 # 62 !TSP:SEND:TNR Fail on message: 62 # 63 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 63 # 64 !TSP:SEND:TNR Fail on message: 64 # 65 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:CHKUPL:FAIL (hops=255) !TSM:UPL:FAIL TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 65 # 66 !TSP:SEND:TNR Fail on message: 66 # 67 !TSP:SEND:TNR Fail on message: 67 # 68 !TSP:SEND:TNR Fail on message: 68 # 69 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 69 # 70 !TSP:SEND:TNR Fail on message: 70 # 71 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 71 # 72 !TSP:SEND:TNR Fail on message: 72 # 73 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:CHKUPL:FAIL (hops=255) !TSM:UPL:FAIL TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 73 # 74 !TSP:SEND:TNR Fail on message: 74 # 75 !TSP:SEND:TNR Fail on message: 75 # 76 !TSP:SEND:TNR Fail on message: 76 # 77 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 77 # 78 !TSP:SEND:TNR Fail on message: 78 # 79 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 79 # 80 !TSP:SEND:TNR Fail on message: 80 # 81 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1 TSP:CHKUPL:FAIL (hops=255) !TSM:UPL:FAIL TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 81 # 82 !TSP:SEND:TNR Fail on message: 82 # 83 !TSP:SEND:TNR Fail on message: 83 # 84 !TSP:SEND:TNR Fail on message: 84 # 85 TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: !TSP:SEND:TNR Fail on message: 85 # 86 !TSP:SEND:TNR Fail on message: 86 # 87 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 87 # 88 !TSP:SEND:TNR Fail on message: 88 # 89 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=ok:1 TSP:MSG:READ 99-99-0 s=0,c=1,t=1,pt=7,l=5,sg=0:62.2 !TSM:MSG:REL MSG, but not a repeater TSP:MSG:READ 0-0-250 s=255,c=3,t=25,pt=1,l=1,sg=0:1 TSP:MSG:PONG RECV (hops=1) TSP:CHKUPL:OK TSM:UPL:OK TSM:READY !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=0,st=fail:89 Fail on message: 89 # 90 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=1,st=fail:90 Fail on message: 90 # 91 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=2,st=fail:91 Fail on message: 91 # 92 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=3,st=fail:92 Fail on message: 92 # 93 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:92 Missed messages: 43 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=4,st=fail:93 Fail on message: 93 # 94 TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:93 Missed messages: 0 !TSP:MSG:SEND 250-250-0-0 s=0,c=1,t=3,pt=2,l=2,sg=0,ft=5,st=fail:94 Fail on message: 94 # 95 !TSM:UPL FAIL, SNP TSM:FPAR TSP:MSG:SEND 250-250-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=bc: TSP:MSG:READ 0-0-250 s=0,c=1,t=3,pt=2,l=2,sg=0:94 Missed messages: 0 TSP:MSG:READ 0-0-250 s=255,c=3,t=8,pt=1,l=1,sg=0:0 TSP:MSG:FPAR RES (ID=0, dist=0) TSP:MSG:PAR OK (ID=0, dist=1) !TSP:SEND:TNR Fail on message: 95 # 96 !TSP:SEND:TNR Fail on message: 96 # 97 !TSP:SEND:TNR Fail on message: 97 # 98 !TSP:SEND:TNR Fail on message: 98 # 99 TSM:FPAR:OK TSM:ID TSM:CHKID:OK (ID=250) TSM:UPL TSP:PING:SEND (dest=0) !TSP:MSG:SEND 250-250-0-0 s=255,c=3,t=24,pt=1,l=1,sg=0,ft=0,st=fail:1Also, the meter in action generating the output above can be seen here: LINK
After some time, >10 min, the fail percentage is 100 % and the miss percentage around 85 %. Not impressive if interpreted correctly. Could someone give me some pointers to what the problem is? I don't talk "mysensors protocol".Sorry @siod, I don't think I can help you. You seem to get a lot more messages through though.
-
@NickBuilder you seem to have a pretty bad connection (hardware related) . The meter has to be built with a reliable power source and connections. I can't see from the movie how your radio is powered. The reason for using the adapter plate is that it includes a separate ldo and capacitors.
-
@siod the meter works like a normal sketch. If it does not get past making a connection the rest of the code won't start (ie the LCD). To be honest I can't make up a reason from the serial logs except that your node has problems finding it's parent.
-
@AWI, it's hardly visible but I'm actually using a 3V3 buck and a 10 uF cap to power the radio. But I took your advice and tried tos power the radio seperately with two AA batterys, and a cap just in case. This should be a really clean source of power but the outcome is still the same.
I guess I'll order som new radios, hopefully from a different supplier. I'll get some adapter boards with (switchless) LDO's while I'm at it.
Why is the parent changing from 255 to 0 back and forth? I have a serial gateway connected to a Pi and aside from some temp sensors I also have an RC switch for my outlets which also acts as a gateway but the adress is neither 255 nor 0.
Thanks!
-
@NickBuilder I hope you solve your issues with new radio's. I have very little which don't function at all.
The id "0" belongs to your gateway "255" is a kind of broadcast id which is a.o. used when a node number is not known. Both id's are not available for you to assign to a node.
-
For those who need and don't have a display like me, here is my sketch version for output to the serial console. So what I do is, I run around with a laptop connected to the node and watch the serial console, or, I just move around with a tablet and the node. The tablet is connected to my raspi and I watch the output of my gw on the pi using picocom. Picocom handles very well the missing line feeds in the output. The gw output is also very informative, there are no statistics, but still I see when stuff fails...
Thanks for the cool sketch @AWI!
/* PROJECT: MySensors / Quality of radio transmission PROGRAMMER: AWI (MySensors libraries) DATE: 20160529/ last update: 20160530 FILE: AWI_Send.ino LICENSE: Public domain Hardware: ATMega328p board w/ NRF24l01 and MySensors 2.0 Special: Summary: Sends a radio message with counter each x time to determine fault ratio with receiver Remarks: Fixed node-id & communication channel to other fixed node Change log: 20160530 - added moving average on fail/ miss count, update to 2.0 */ //**** MySensors ***** // Enable debug prints to serial monitor #define MY_DEBUG #define MY_RADIO_NRF24 // Enable and select radio type attached //#define MY_RF24_CHANNEL 80 // radio channel, default = 76 // MIN, LOW, HIGH, MAX #define MY_RF24_PA_LEVEL RF24_PA_LOW #define MY_NODE_ID 250 #define NODE_TXT "Q 250" // Text to add to sensor name #define MY_PARENT_NODE_ID 99 // fixed parent to controller when 0 (else comment out = AUTO) #define MY_PARENT_NODE_IS_STATIC #define MY_BAUD_RATE 9600 // #define MY_RF24_CE_PIN 7 // Ceech board, 3.3v (7,8) (pin default 9,10) // #define MY_RF24_CS_PIN 8 #define DESTINATION_NODE 0 // receiving fixed node id (default 0 = gateway) #include <SPI.h> #include <MySensors.h> // helpers #define LOCAL_DEBUG #ifdef LOCAL_DEBUG #define Sprint(a) (Serial.print(a)) // macro as substitute for print, enable if no print wanted #define Sprintln(a) (Serial.println(a)) // macro as substitute for println #else #define Sprint(a) // enable if no print wanted -or- #define Sprintln(a) // enable if no print wanted #endif // MySensors sensor #define counterChild 0 // send constants and variables int messageCounter = 0 ; const int messageCounterMax = 100 ; // maximum message counter value const unsigned counterUpdateDelay = 500 ; // send every x ms and sleep in between // receive constants and variables boolean failStore[messageCounterMax] ; // moving average stores & pointers int failStorePointer = 0 ; boolean missedStore[messageCounterMax] ; int missedStorePointer = 0 ; int newMessage = 0 ; int lastMessage = -1 ; int missedMessageCounter = 0 ; // total number of messages in range (messageCounterMax) int failMessageCounter = 0 ; // total number of messages in range (messageCounterMax) uint8_t parent = 0 ; // parent node-id // standard messages MyMessage counterMsg(counterChild, V_PERCENTAGE); // Send value void setup() { for(int i= 0 ; i < messageCounterMax ; i++){ // init stores for moving averages failStore[i] = true ; missedStore[i] = true ; } missedStorePointer = failStorePointer = 0 ; delay(1000); } void presentation(){ // MySensors present(counterChild, S_DIMMER, "Quality counter " NODE_TXT) ; // counter uses percentage from dimmer value } void loop() { // Sprint("count:") ; Sprintln(messageCounter) ; Sprint("Parent: "); Sprint(parent); Sprint(" Fail "); Sprint(failMessageCounter); Sprint(" "); Sprint(getCount(failStore, messageCounterMax)); Sprintln("%"); Sprint("Destination: "); Sprint(DESTINATION_NODE); Sprint(" Miss "); Sprint(missedMessageCounter); Sprint(" "); Sprint(getCount(missedStore, messageCounterMax)); Sprintln("%"); missedStore[failStorePointer] = false ; // set slot to false (ack message needs to set) ; boolean succes = failStore[failStorePointer] = send(counterMsg.setDestination(DESTINATION_NODE).set(failStorePointer), true); // send to destination with ack if (!succes){ failMessageCounter++ ; Sprint("Fail on message: ") ; Sprint(failStorePointer) ; Sprint(" # ") ; Sprintln(failMessageCounter); } failStorePointer++ ; if(failStorePointer >= messageCounterMax){ failStorePointer = 0 ; // wrap counter } parent = getParentNodeId(); // get the parent node (0 = gateway) wait(counterUpdateDelay) ; // wait for things to settle and ack's to arrive } void receive(const MyMessage &message) { // Expect few types of messages from controller newMessage = message.getInt(); // get received value switch (message.type){ case V_PERCENTAGE: missedStore[newMessage] = true ; // set corresponding flag to received. if (newMessage > lastMessage){ // number of messages missed from lastMessage (kind of, faulty at wrap) Sprint("Missed messages: ") ; Sprintln( newMessage - lastMessage - 1) ; missedMessageCounter += newMessage - lastMessage - 1 ; } lastMessage = newMessage ; break ; default: break ; } } // calculate number of false values in array // takes a lot of time, but who cares... int getCount(boolean countArray[], int size){ int falseCount = 0 ; for (int i = 0 ; i < size ; i++){ falseCount += countArray[i]?0:1 ; } return falseCount ; }
-
@karl261 I tried your code and it pretty much just gives me failures? I don't have any issues with nodes and tried it out of curiosity, any ideas? It seems to send pretty fast, perhaps its spamming my gateway too much?
-
@Mark-Swift Where do you see the failures? Do you have a log output?
The code is for mysensors 2.0.0. Did you adapt all the network specific #define in the beginning of the sketch to your network? In my example there is a static parent set and the static parent has the ID 99. If that does not exist, there will be failures.
-
Hi @karl261 I'm using the latest 2.0 snapshot, and did change the network specific settings. I'll grab a debug output and post it up next time I get access to the gateway...
-
@AWI, thanks to your sketch and the concept of transmission quality measurement I did some adjustments to my setup.
I guess the most critical reason for the bad numbers shown on the meter for my network was due to a poor gateway. After applying the cheep and dirty EMI fix, a ground connected foil, and playing around with the transceiver power I finally got some good numbers on the meter.
So now I've placed a post-it on each module indicating a sort of long term fail average. A couple of them shows quite poor fail/miss values, 60-80 %. The best ones reaches around 5-15 % but this could be due to the gateway radio.
Actually I still don't know if the gateway transceiver is optimized. I should test some additional radio units.
Using large caps for the radio is recommended. There's no reason why not to use a bigger cap, > x00 uF. The ones rated for lower voltages are quite small in physical terms.
Thank you for this @AWI!
-
I just wanted to say thanks for this project, I think we need more tools like this that increase quality of our projects (and thus increase WAF as well).
Also wanted to ask would it be too complicated and/or practical to include measurement of the radio consumption while it is sending and sleeping?
Maybe a switch/jumper and a bit of code modification that would let radio sleep, and we could use a amper meter in serial with the radio? Even better if some simple "integrated" current measurement method could be used, some voltage drop on some other pins measured directly in the tester or what not (that would be above my knowledge, but I might just try it in a few months when I get some spare time)
-
@dakipro It would take a resistor and analog power reading to include basic power measurement. Current would vary between ~3mA and 70mA (with amplified radio).
-
@AWI Thanks for this great tool. It helped me very much and I tried to implement some extended features.
Here is my current result: It has now a menu interface with two buttons. You can change the pa level and the send repeat tries. Further you can measure the current of the radio module and reset the store. Configuration parameters are stored in EEPROM. See following code for more details./* PROJECT: MySensors / Quality of radio transmission PROGRAMMER: AWI (MySensors libraries), modified by Heizelmann DATE: 20160529/ last update: 20171012 FILE: AWI_Send.ino LICENSE: Public domain Hardware: ATMega328p board (e.g. Arduino pro nano) w/ NRF24l01 and MySensors 2.1.1 Special: Summary: Sends a radio message with counter each x time to determine fault ratio with receiver Remarks: Fixed node-id & communication channel to other fixed node Change log: 20160530 - added moving average on fail/ miss count, update to 2.0 20171012 - extensions by @Heizelmann . added radio current measurement . added pa level switching . added send repeat option . added LCD Display with parallel interface . added two button to change pa level, send repeat count, reset store and display radio current . store config params in EEPROM . connect timeout with MY_TRANSPORT_WAIT_READY_MS @see https://forum.mysensors.org/topic/3984/nrf24l01-connection-quality-meter */ //**** MySensors ***** // Enable debug prints to serial monitor //#define MY_DEBUG #define MY_RADIO_NRF24 // Enable and select radio type attached //#define MY_RF24_CHANNEL 80 // radio channel, default = 76 // Set LOW transmit power level if you have an amplified NRF-module // if power your radio separately with a good regulator you can turn up PA level. // MIN, LOW, HIGH, MAX #define MY_RF24_PA_LEVEL RF24_PA_MAX //default = MAX on nodes, LOW on gateway and repeater #define MY_NODE_ID 250 #define NODE_TXT "Quality counter Q 250" // Init timeout for gateway not reachable #define MY_TRANSPORT_WAIT_READY_MS 20000 //ms; supported since MySensors V2.1 beta //#define MY_PARENT_NODE_ID 32 // fixed parent to controller when 0 (else comment out = AUTO) //#define MY_PARENT_NODE_IS_STATIC // #define MY_RF24_CE_PIN 7 // Ceech board, 3.3v (7,8) (pin default 9,10) // #define MY_RF24_CS_PIN 8 #define DESTINATION_NODE 0 // receiving fixed node id (default 0 = gateway) #define MY_BAUD_RATE 115200 #include <SPI.h> #include <MySensors.h> //#include <LiquidCrystal_I2C.h> // LCD display with I2C interface #include <LiquidCrystal.h> // LCD display with parallel interface #include <OneButton.h> //from https://github.com/mathertel/OneButton/blob/master/examples/TwoButtons/TwoButtons.ino // helpers #define LOCAL_DEBUG #ifdef LOCAL_DEBUG #define Sprint(a) (Serial.print(a)) // macro as substitute for print, enable if no print wanted #define Sprintln(a) (Serial.println(a)) // macro as substitute for println #else #define Sprint(a) // enable if no print wanted -or- #define Sprintln(a) // enable if no print wanted #endif // MySensors sensor #define COUNTER_CHILD 0 // send constants and variables int messageCounter = 0 ; const int messageCounterMax = 100 ; // maximum message counter value const unsigned counterUpdateDelay = 500 ; // send every x ms and sleep in between // receive constants and variables boolean failStore[messageCounterMax] ; // moving average stores & pointers int failStorePointer = 0 ; boolean missedStore[messageCounterMax] ; int missedStorePointer = 0 ; int newMessage = 0 ; int lastMessage = -1 ; int missedMessageCounter = 0 ; // total number of messages in range (messageCounterMax) int failMessageCounter = 0 ; // total number of messages in range (messageCounterMax) uint8_t parent = 0 ; // parent node-id // Loop delays const unsigned long displayInterval = 1000UL ; // display update in ms unsigned long lastDisplayUpdate = 0 ; // last update for loop timers // standard messages MyMessage counterMsg(COUNTER_CHILD, V_PERCENTAGE); // Send value // ***** LCD #define LCD_COLS 16 #define LCD_ROWS 2 //LiquidCrystal_I2C lcd(0x27, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE); // Set the LCD I2C address //LiquidCrystal_I2C lcd(0x27, 16, 2); // Set the LCD I2C address LiquidCrystal lcd(8, 7, 6, 5, 4, 3); // LCD with paralell interface #define CURRENT_PIN A5 #define BUTTON1_PIN A1 #define BUTTON2_PIN A2 OneButton button1(BUTTON1_PIN, true); //PullUp, Activelow OneButton button2(BUTTON2_PIN, true); //PullUp, Activelow // Options #define EEPROM_FLAG 0 #define EEPROM_PA_LEVEL 1 #define EEPROM_SEND_REPEATS 2 #define LEVEL_ITEMS 4 const char *paLevelNames[LEVEL_ITEMS] = { "MIN", "LOW", "HIGH", "MAX" }; uint8_t rf24palevel = MY_RF24_PA_LEVEL; #define MIN_REPEAT_DELAY 50 #define MAX_REPEAT_DELAY 200 uint8_t sendRepeats = 3; // Current measurement #define CORRECTION 9.285 int currentMa; // Menu #define MENU_TIMEOUT 10000 enum mode { STATE_RUN, STATE_RUN2, STATE_PALEVEL, STATE_RESEND}; mode opState = STATE_RUN; unsigned long lastClickedMillis; boolean dspRefresh = true; void before() { pinMode(CURRENT_PIN, INPUT); analogReference(INTERNAL); // Wire.begin(); // I2C // ** LCD display ** lcd.begin(LCD_COLS, LCD_ROWS); //lcd.setBacklight(HIGH); lcd.home(); lcd.setCursor(0, 0); lcd.print("AWIQuality nRF24"); lcd.setCursor(0, 1); lcd.print("Connect..."); initStore(); delay(1000); button1.attachClick(onButton1Pressed); button1.attachLongPressStart(onButton1LongPressed); button2.attachClick(onButton2Pressed); if (loadState(EEPROM_FLAG) == 0xFF) { rf24palevel = loadState(EEPROM_PA_LEVEL); sendRepeats = loadState(EEPROM_SEND_REPEATS); } else { saveState(EEPROM_FLAG, 0xFF); saveState(EEPROM_PA_LEVEL, rf24palevel); saveState(EEPROM_SEND_REPEATS, sendRepeats); } } void presentation() { present(COUNTER_CHILD, S_DIMMER, NODE_TXT) ; // counter uses percentage from dimmer value } void loop() { button1.tick(); button2.tick(); if (opState != STATE_RUN && opState != STATE_RUN2 && millis() - lastClickedMillis > MENU_TIMEOUT) { Sprintln("Timeout"); setRFLevel(rf24palevel); saveState(EEPROM_PA_LEVEL, rf24palevel); saveState(EEPROM_SEND_REPEATS, sendRepeats); opState = STATE_RUN; } if (dspRefresh) LCD_local_display(); if ( opState == STATE_RUN ) { Sprint("count:") ; Sprintln(messageCounter++) ; missedStore[failStorePointer] = false ; // set slot to false (ack message needs to set) ; boolean success = failStore[failStorePointer] = resend(counterMsg.setDestination(DESTINATION_NODE).set(failStorePointer), sendRepeats); // send to destination with ack currentMa = analogRead(CURRENT_PIN) / CORRECTION; if (!success) { failMessageCounter++ ; Sprint("Fail on message: ") ; Sprint(failStorePointer) ; Sprint(" # ") ; Sprintln(failMessageCounter); } failStorePointer++ ; if (failStorePointer >= messageCounterMax) { failStorePointer = 0 ; // wrap counter } parent = getParentNodeId(); // get the parent node (0 = gateway) wait(counterUpdateDelay) ; // wait for things to settle and ack's to arrive dspRefresh = true; } } void receive(const MyMessage &message) { // Expect few types of messages from controller newMessage = message.getInt(); // get received value switch (message.type) { case V_PERCENTAGE: missedStore[newMessage] = true ; // set corresponding flag to received. if (newMessage > lastMessage) { // number of messages missed from lastMessage (kind of, faulty at wrap) Sprint("Missed messages: ") ; Sprintln( newMessage - lastMessage - 1) ; missedMessageCounter += newMessage - lastMessage - 1 ; } lastMessage = newMessage ; break ; default: break ; } } // calculate number of false values in array // takes a lot of time, but who cares... int getCount(boolean countArray[], int size) { int falseCount = 0 ; for (int i = 0 ; i < size ; i++) { falseCount += countArray[i] ? 0 : 1 ; } return falseCount ; } void initStore() { for (int i = 0 ; i < messageCounterMax ; i++) { // init stores for moving averages failStore[i] = true ; missedStore[i] = true ; } missedMessageCounter = failMessageCounter = 0; } void setRFLevel(uint8_t rfLevel) { Sprint("Set RF Level to "); Sprintln(rf24palevel); uint8_t rfsetup = (((MY_RF24_DATARATE) & 0b10 ) << 4) | (((MY_RF24_DATARATE) & 0b01 ) << 3) | (((rfLevel << 1))) + 1; // +1 for Si24R1; RF24_setRFSetup(rfsetup); } boolean resend(MyMessage &msg, int repeats) { int repeat = 0; int repeatdelay = 0; boolean sendOK = false; while ((sendOK == false) and (repeat < repeats)) { if (send(msg, true)) { //send sendOK = true; } else { sendOK = false; repeatdelay += random(MIN_REPEAT_DELAY, MAX_REPEAT_DELAY); } repeat++; delay(repeatdelay); } return sendOK; } void onButton1Pressed() { dspRefresh = true; lcd.clear(); lcd.home(); switch (opState) { case STATE_RUN: opState = STATE_PALEVEL; break; case STATE_RUN2: opState = STATE_RUN; break; case STATE_PALEVEL: opState = STATE_RESEND; break; case STATE_RESEND: setRFLevel(rf24palevel); saveState(EEPROM_PA_LEVEL, rf24palevel); saveState(EEPROM_SEND_REPEATS, sendRepeats); opState = STATE_RUN; break; } lastClickedMillis = millis(); } void onButton2Pressed() { dspRefresh = true; lcd.clear(); lcd.home(); switch (opState) { case STATE_RUN: opState = STATE_RUN2; break; case STATE_RUN2: opState = STATE_RUN; break; case STATE_PALEVEL: rf24palevel++; if (rf24palevel > 3) rf24palevel = 0; break; case STATE_RESEND: sendRepeats++; if (sendRepeats > 3) sendRepeats = 1; break; } lastClickedMillis = millis(); } void onButton1LongPressed() { initStore(); } void LCD_local_display(void) { dspRefresh = false; char buf[LCD_COLS + 1]; // buffer for max 16 char display switch (opState) { case STATE_RUN: lcd.setCursor(0, 0); snprintf(buf, sizeof buf, "P%-3dFail%4d%3d%%", parent, failMessageCounter, getCount(failStore, messageCounterMax)); lcd.print(buf); lcd.setCursor(0, 1); snprintf(buf, sizeof buf, "D%-3dMiss%4d%3d%%", DESTINATION_NODE , missedMessageCounter, getCount(missedStore, messageCounterMax)); lcd.print(buf); break; case STATE_RUN2: lcd.setCursor(0, 0); snprintf(buf, sizeof buf, "PA Level = %s", paLevelNames[rf24palevel]); lcd.print(buf); lcd.setCursor(0, 1); snprintf(buf, sizeof buf, "Current = %dmA", currentMa); lcd.print(buf); break; case STATE_PALEVEL: lcd.setCursor(0, 0); snprintf(buf, sizeof buf, "PA Level = %s", paLevelNames[rf24palevel]); lcd.print(buf); break; case STATE_RESEND: lcd.setCursor(0, 0); snprintf(buf, sizeof buf, "Send repeats = %d", sendRepeats); lcd.print(buf); break; } }
-
See further advanced project nRF24Doctor. Great thanks to @Technovation
-
@heizelmann I'm happy to see that you can appreciate my work as a continuation of the nice job you already did on this thread.



Suggested Topics
-

Welcome
Announcements • • hek