sorry i found . spi was disable in now raspbian.
but now i have problem in domoticz:
R
reza
@Reza
Posts
-
problem in compile gateway for raspberry -
problem in compile gateway for raspberrybefore there was a setting for SPIDEV but now this is not ! how setting spidev
-
problem in compile gateway for raspberryhi friend
i want use lastest version mysensors gateway . but i have problem.
i setup this :git clone https://github.com/mysensors/MySensors.git --branch development cd MySensors ./configure --my-transport=nrf24 --my-rf24-channel=0 --my-rf24-pa-level=RF24_PA_MAX --my-gateway=serial --my-serial-is-pty --my-serial-pty=/dev/ttyUSB020 makebut this is result:
gcc -MT build/drivers/Linux/log.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o g++ -MT build/drivers/Linux/SerialSimulator.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/SerialSimulator.cpp -o build/drivers/Linux/SerialSimulator.o g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -DMY_RF24_PA_LEVEL=RF24_PA_MAX -DMY_RF24_CHANNEL=0 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o In file included from examples_linux/mysgw.cpp:74:0: ./MySensors.h:254:2: error: #error No support for nRF24 radio on this platform #error No support for nRF24 radio on this platform ^~~~~ In file included from ./drivers/RF24/RF24.cpp:23:0, from ./MySensors.h:290, from examples_linux/mysgw.cpp:74: ./drivers/RF24/RF24.h:52:17: fatal error: SPI.h: No such file or directory #include <SPI.h> ^ compilation terminated. Makefile:114: recipe for target 'build/examples_linux/mysgw.o' failed make: *** [build/examples_linux/mysgw.o] Error 1 -
I have great problem with raspberry and domoticz and mysensors gateway !ok thank you. but i have a new problem...
i think just move domoticz.log to ram driver. but report of sensors in mysensors... where these is save?:/
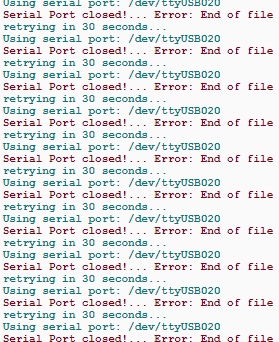
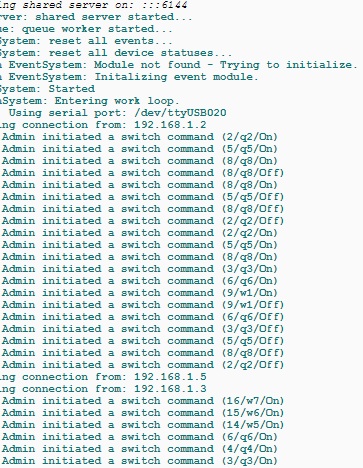
i think report of mysensors can not write... now in domoticz log i can not see report.. also i chack var/log memory after 1 day.when i send command for turn on light (alot command) memory of var/log increase.but 1 day i dont send any command and i wait for increase memory with report sensors but dont increase.what is problem? when i change your setting to defult work and i see report of sensors.
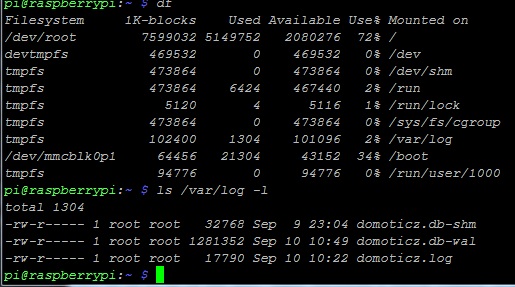
and this is memory of log after one day. sensors was sending report to controller for 1 deys but before memory was 1304 and now is 1304...
-
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo i found this script.but becuase i am beginner in script i can not know this.
can we use this for clean tmpfs after 2day each week ? can you edit this for our use exactly ? i build a tmpfs in /var/log . and i move domoticz.log to this folder... now what change i need in this script for clean /var/log every 2 days and how to use this automatic for always when power off/on , reboot and...
thank you for help#!/bin/bash # Diskclean-Linux.sh - Remove unused files from /tmp directories # @author: Crunchify.com # ------------- Here are Default Configuration -------------------- # CRUNCHIFY_TMP_DIRS - List of directories to search # DEFAULT_FILE_AGE - # days ago (rounded up) that file was last accessed # DEFAULT_LINK_AGE - # days ago (rounded up) that symlink was last accessed # DEFAULT_SOCK_AGE - # days ago (rounded up) that socket was last accessed CRUNCHIFY_TMP_DIRS="/tmp /var/tmp /usr/src/tmp /mnt/tmp" DEFAULT_FILE_AGE=+2 DEFAULT_LINK_AGE=+2 DEFAULT_SOCK_AGE=+2 # Make EMPTYFILES true to delete zero-length files EMPTYFILES=false #EMPTYFILES=true cd /tmp/log "cleantmp.sh[$$] - Begin cleaning tmp directories" echo "" echo "delete any tmp files that are more than 2 days old" /usr/bin/find $CRUNCHIFY_TMP_DIRS \ -depth \ -type f -a -ctime $DEFAULT_FILE_AGE \ -print -delete echo "" echo "delete any old tmp symlinks" /usr/bin/find $CRUNCHIFY_TMP_DIRS \ -depth \ -type l -a -ctime $DEFAULT_LINK_AGE \ -print -delete echo "" if /usr/bin/$EMPTYFILES ; then echo "delete any empty files" /usr/bin/find $CRUNCHIFY_TMP_DIRS \ -depth \ -type f -a -empty \ -print -delete fi echo "Delete any old Unix sockets" /usr/bin/find $CRUNCHIFY_TMP_DIRS \ -depth \ -type s -a -ctime $DEFAULT_SOCK_AGE -a -size 0 \ -print -delete echo"" echo "delete any empty directories (other than lost+found)" /usr/bin/find $CRUNCHIFY_TMP_DIRS \ -depth -mindepth 1 \ -type d -a -empty -a ! -name 'lost+found' \ -print -delete echo "" /usr/bin/logger "cleantmp.sh[$$] - Done cleaning tmp directories" # send out an email about diskcleanup action mail -s "Disk cleanup has been performed successfully." you@email.com echo "" echo "Diskcleanup Script Successfully Executed" exit 0 -
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo
every night !! :O you do with hand or auto with a program? if you have a program for this can you share this ?
i test with 1mb memory, i see after full , domoticz dont work and have some problem. so we must clear ...
can you help me for build a program for this ? for example when this is 90% memory (tmpfs) so clear this... -
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo thanks for all guide. i could do it. thank you
My friend just one question . i want know if i choose for example 20mb for ram driver (tmpfs). after full this memory (if i dont clear this), so what happen ? raspberry will be crash ? or not happen and I dont have any new log and report ? or again write on ago log ? thank you for all help -
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo thank you . i will search about this issue
-
I have great problem with raspberry and domoticz and mysensors gateway !@gohan because i wanted change some things. for example font , theme , icons and etc...
-
I have great problem with raspberry and domoticz and mysensors gateway !@sundberg84
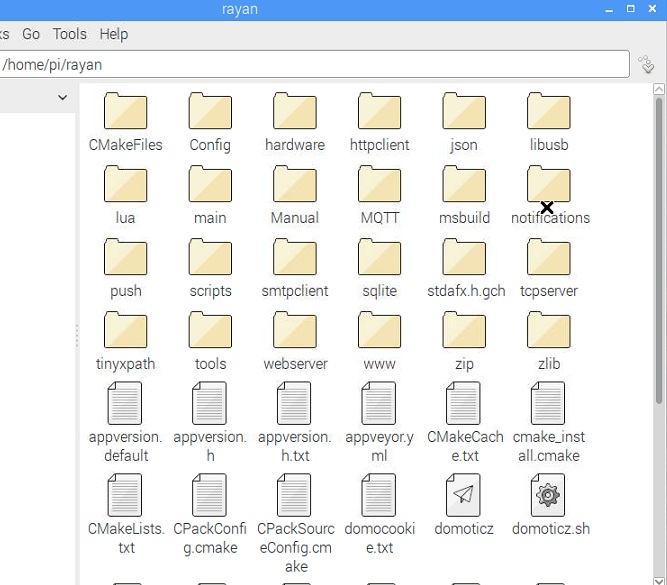
thank you friend. domoticz now is working for me.but when run ps i dont see domoticz:pi@raspberrypi:~ $ ps PID TTY TIME CMD 1000 pts/0 00:00:00 bash 1026 pts/0 00:00:00 Xtightvnc 1031 pts/0 00:00:00 xstartup 1034 pts/0 00:00:00 lxsession 1066 pts/0 00:00:00 dbus-launch 1084 pts/0 00:00:00 openbox 1086 pts/0 00:00:00 lxpolkit 1088 pts/0 00:00:00 lxpanel 1090 pts/0 00:00:01 pcmanfm 1134 pts/0 00:00:00 start-pulseaudi 1135 pts/0 00:00:00 xprop 1585 pts/0 00:00:01 Xtightvnc 1589 pts/0 00:00:00 xstartup 1592 pts/0 00:00:00 lxsession 1624 pts/0 00:00:00 dbus-launch 1643 pts/0 00:00:00 openbox 1645 pts/0 00:00:00 lxpolkit 1647 pts/0 00:00:00 lxpanel 1649 pts/0 00:00:02 pcmanfm 1693 pts/0 00:00:00 start-pulseaudi 1694 pts/0 00:00:00 xprop 2546 pts/0 00:00:00 psthis is files after compile . and i put "/home/pi/rayan/domoticz" to "rc.local" for up after startup.
-
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo i search about this and i test this code before:
Start Domoticz
sudo service domoticz.sh startStop Domoticz
sudo service domoticz.sh stopCheck if Domoticz is running
sudo service domoticz.sh statusbut this is dont work for domoticz that compile from source.
this is result:pi@raspberrypi:~ $ sudo service domoticz.sh stop Failed to stop domoticz.service: Unit domoticz.service not loaded. pi@raspberrypi:~ $ sudo service domoticz.sh status ● domoticz.service Loaded: not-found (Reason: No such file or directory) Active: inactive (dead) pi@raspberrypi:~ $for this i had to question from you :(
-
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo do you know how i can stop domoticz.sh (after i compile source domoticz) for change log...
i see this topic. (https://www.domoticz.com/wiki/Moving_Log_and_Temporary_Files_To_a_RAM_Drive)
but this is for standard install. i use source and i can not how stop and change and start again.... -
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo thank you again my dear friend.
-
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo you was helper for me always . thank you for this .
i found this :
https://www.domoticz.com/wiki/Setting_up_a_RAM_drive_on_Raspberry_Pi
this is help me for dont happen fail again ?
again thank you for help -
I have great problem with raspberry and domoticz and mysensors gateway !@tbowmo
now you use a external memory for log ? and have not any problem ?
can you give me a Training link for setup step by step usb memory for write log ? -
I have great problem with raspberry and domoticz and mysensors gateway !thank you dear @tbowmo
so this (fail cpu or rpi board) can related to write in cd card ? because i am confused .i can not found why suddenly... . i tested power and didn't have problem(if power of my house have problem so first power supply of raspberry should to fail). my rpi was working for 7-8 month without any access people to it and i dont any install new app or program. just power on rpi and put on my table !
in rpi was just domoticz and mysensors gateway. i used this just for smart home.
now i want just found reason of problem and solve this :(
do you think this problem (rpi fail) can related to sd card ? (According to the above description)
if yes , so for resolve , what is your suggest ? use a usb memory ? or read only (i want use rpi just for domoticz and mysensors gateway and devices)?with read only i can not see any report in domoticz log ?
thank you -
I have great problem with raspberry and domoticz and mysensors gateway !@vikasjee thank you . but my main problem is not sd card . after 8 month my Rpi is fail suddenly :( i want found why...
-
I have great problem with raspberry and domoticz and mysensors gateway !@sundberg84 my new sd card is sandisk. setup again domoticz and mysensors gateway...
now os is ok even with power off/on. but i think my raspberry is fail . i think cpu is fail. before i compile domoticz with -j4 without any problem . but now with -j4 after 10-20% rpi is freeze. even when i compile with just make, when i want use domoticz for send command for relay , this have a a lot delay , or command can not send , or save command and after 1 min send all command. i think cpu can not work correct and have a hardware problem ! but i dont know why happen this ! after 7 month rpi was on the table and power was ok and i dont install any new software on the rpi ! suddenly happen... -
I have great problem with raspberry and domoticz and mysensors gateway !@sundberg84
i buy a new sd card and write again os and domoticz and gateway...
now LED is ok and i have a ip for raspberry. but i think my raspberry's hardware is failure because now my commands send with a lot delay or can not send. or save and send all commands together suddenly . Do you know why?but about read only. thank you . i read this. but i have question. with this work after power off/on my sd card will not fail , is this true ? but when i do to read only , there is not any problem in Performance domoticz and my sensors and gateway? for send and receive commands ?after setup domoticz and my sensors gate way i can change to read only ? thank you
-
I have great problem with raspberry and domoticz and mysensors gateway !@marceltrapman said in I have great problem with raspberry and domoticz and mysensors gateway !:
I don't think that is what I said, I wrote down how I solved it.
Not saying that it will work for you but it could be worth the try.thank you my friend