Radio FAIL after ~3 weeks [SOLVED]
-
So let us start from scratch.
Before i want to know
- what type of computer are you using (laptop?)
- Operating system? (Windows?, which version)
- are you familiar with any kind of terminal? (Putty, Kermit?)
- does your OrangePi have wifi?
-
@tboha
i use a loptop with win 7 . i use putty for connect to orangepi. no orange pi is connect with LANHopefully your Nodes 2, 3 and 4 are ok (they communicated correctly according to your log).
So take two of them.
Make one a new serial GW and the other a "MockMySensors" Node.Despite my old Message - please change RF-Channels to another Channel (i don´t know is 72 legal?) for both Arduinos,
Please connect both to your Windows 7 machine with some longer USB cables so you can space them a little apart.
I built meanwhile the same complex - one serial GW and one Mock-Node
-
Hopefully your Nodes 2, 3 and 4 are ok (they communicated correctly according to your log).
So take two of them.
Make one a new serial GW and the other a "MockMySensors" Node.Despite my old Message - please change RF-Channels to another Channel (i don´t know is 72 legal?) for both Arduinos,
Please connect both to your Windows 7 machine with some longer USB cables so you can space them a little apart.
I built meanwhile the same complex - one serial GW and one Mock-Node
-
@tboha
i dont know what is mock my sensors ! so you told me build a new gateway with channel for example 1 ? ( my gateway is channel 0 now) and build a node(relay with channel 1)? gateway connect to my loptop with usb cable ?@Reza "MockMySensors" is a Sketch from Mysensors Examples - it doesn´t need any hardware and simulates input for your GW and controller (e.g. giving random numbers as temperature or as humidity - you can chose within the sketch). So you get some Network traffic to check your components without any effort.
Yes change Channel to a private one - far away from channel 0. Maybe 72 is ok - I will look for it.
-
@tboha
i dont know what is mock my sensors ! so you told me build a new gateway with channel for example 1 ? ( my gateway is channel 0 now) and build a node(relay with channel 1)? gateway connect to my loptop with usb cable ? -
@Reza "MockMySensors" is a Sketch from Mysensors Examples - it doesn´t need any hardware and simulates input for your GW and controller (e.g. giving random numbers as temperature or as humidity - you can chose within the sketch). So you get some Network traffic to check your components without any effort.
Yes change Channel to a private one - far away from channel 0. Maybe 72 is ok - I will look for it.
-
@tboha
my dear friend i suggest continue about this my problem in personal chat or a new topic from me! because other friend may be sad about this long chat.thank you -
@Reza:
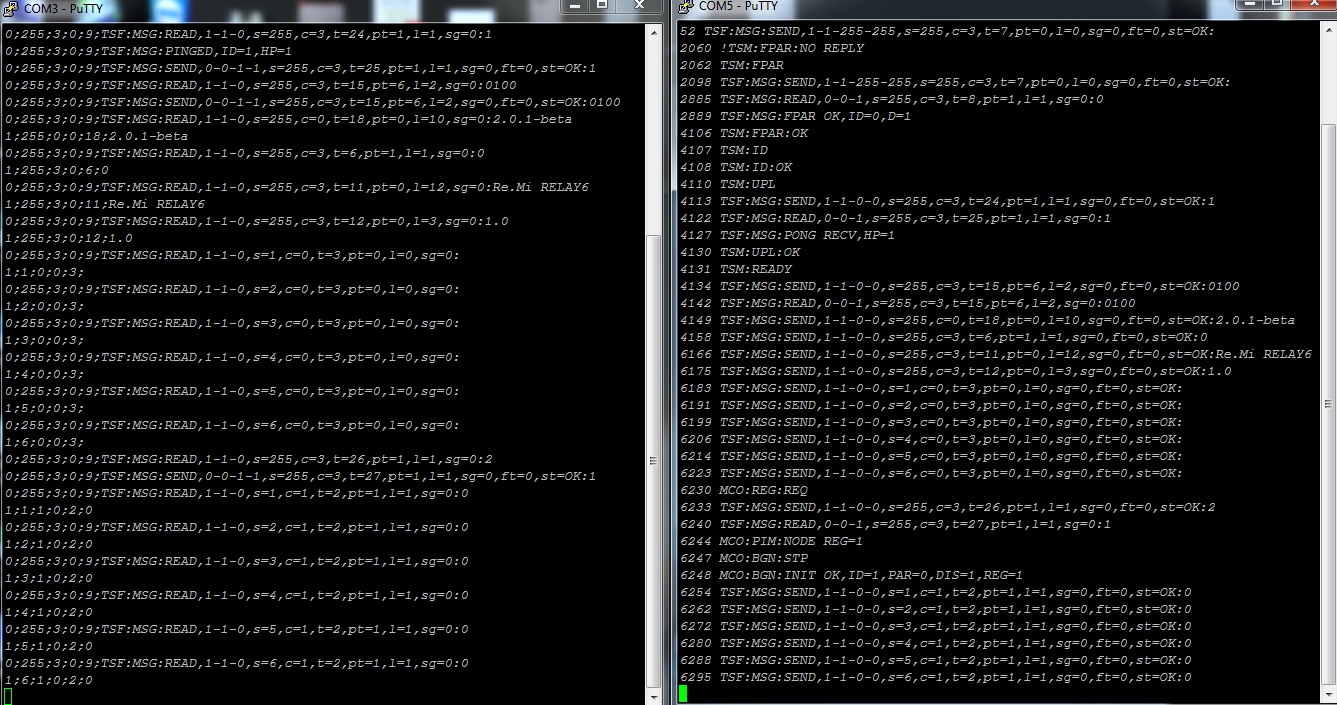
I tried to reproduce the errors shown by your log.
Part of the errors could be reproduced.
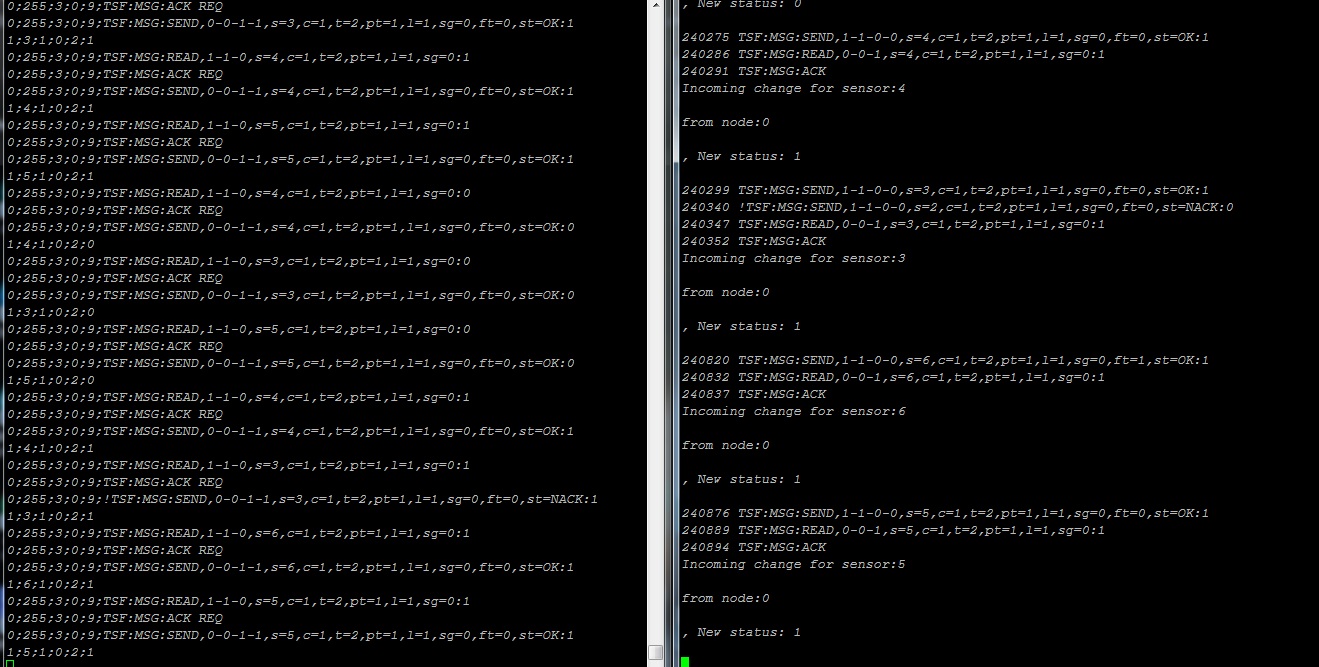
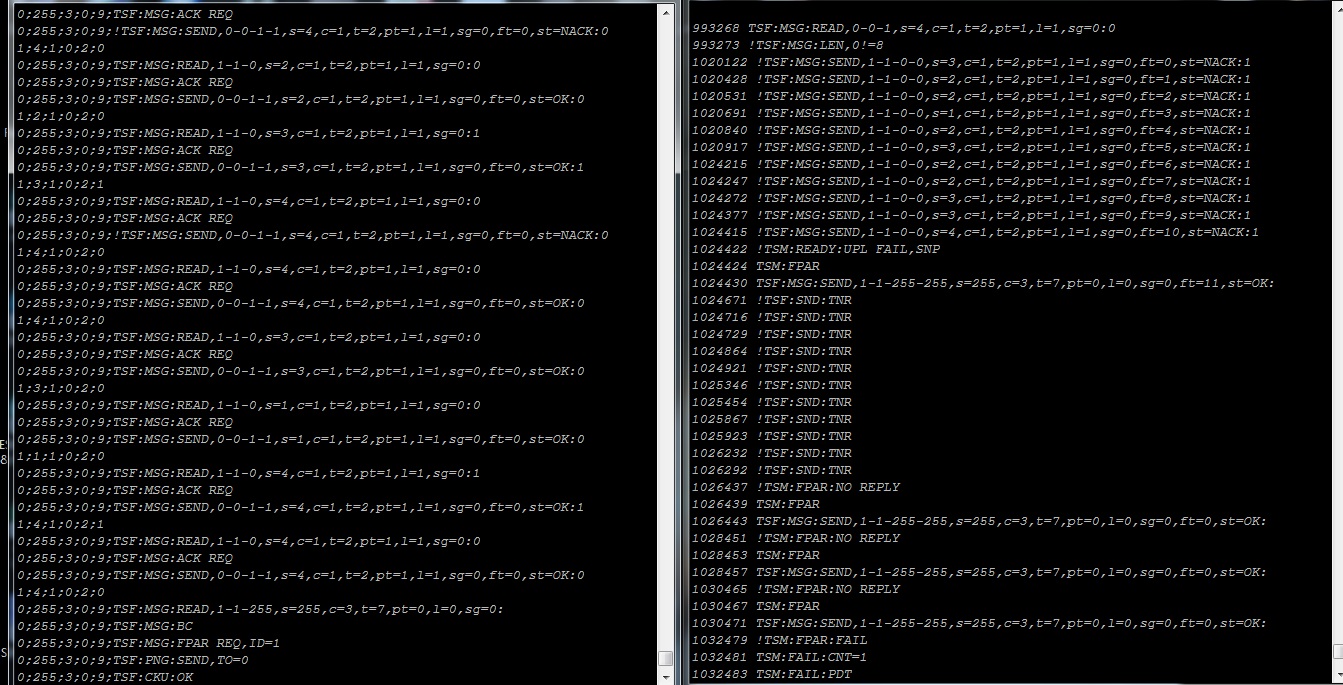
So if you are leaving range of stable connections, node will try to get an new parent (within range). So broadcasting for new parent is "normal". As long as there is no valid connection node will reject sending messages because "Transport Not Ready". So this is "normal", too.Leaving range resulted in one or two NACK, then connection died quietly. I never got this amount of NACK you got.
I could not reproduce !TSF:MSG:LEN:0!=8 or something similar. This means the message has been crippled (possibly).
Reviewing logs and testing on my configuration revealed no clue to defective Chips (in regard to NRF24L01). Chips could be fake though, but at least software functions seem to be ok.
Fake NRF modules are reported to have very varying (worse) connection distances, sometimes down to a few (possibly only one) meter(s). Maybe -- may be not.
There are two major differences between our setups. I am currently not working with ACKs, I will test this tomorrow.
Second - I got no actual relays connected (only LEDs). You reported transmission break down simultaneously to pressing switches at higher rate. Are you supplying DC for relays from Arduino or from separate DC-supply? Have you made any arrangement preventing inductive spikes (ferrite rings, self-induction recuperation diode etc) ?
If you simply unhook your relays and try again - you get better results? (since your non-inductive sensors work well).If this will turnout true - you may give Solid-State-Relais a try.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login