I'd like to have a box for in wall PCBs with exposed AC circuitry, due to safety concerns. Since space is very restricted I've started on a custom box design for 3d printing. If you have seen commercial samples that fit the criteria, feel free to add links/images here. Also if you want to add your own custom designs, please contribute.
My design goals:
Should fit inside a Swedish standard wall box behind the (lamp) switch. Diameter < 65 mm, depth < 30 mm.
Should hold pcb project by @sundberg84 : http://forum.mysensors.org/topic/2488/in-wall-pcb
Other in-wall-pcb box projects:
- UK slimline wall box, depth < 25 mm.
http://forum.mysensors.org/topic/2511/in-wall-light-switch-node-custom-pcb
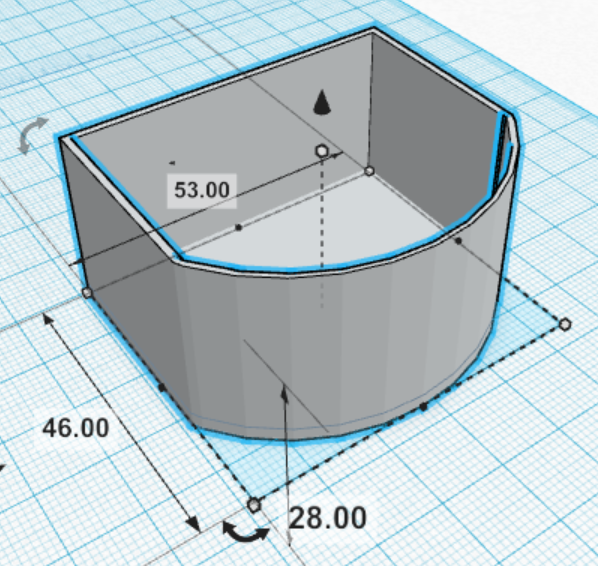
My first WIP design attempt (I'm new to CAD design):