💬 Building a Raspberry Pi Gateway
-
FYI looks like on the 2.3.1 beta the transport has been changed to rf24 instead of nrf24
-
Is the rasberry pi serving as a gateway and a server in this project? Or do you have to have a separate pi to host something like openhab and another pi for your gateway?
-
Hi @magjef29, welcome to the MySensors forum!
You can run your controller(s) on the same Raspberry Pi.
Depending on what tou mean by ”server”, the gateway can be a server, but the gateway is not a controller.
If you haven’t already, see the getting started guide for information about the different parts.
-
Hi! Does anybody test Cubieboard as Gateway? I have a cubieboard runing archlinux with spi enabled in kernel. How i define pins for nrf24 gateway connection? Or i need to make big changes in code to star work with different bord than Rpi?
Best regards
-
This is my old dream to connect directly nrf to Cubieboard GPIOs. Few years ago i try to do this without success using this lib - https://github.com/bearpawmaxim/librf24-sunxi
-
Hi @артем-тихонович, welcome to the MySensors forum!
For the NRF24, the same defines as for normal sketches are used. Documentation: https://www.mysensors.org/apidocs/group__RF24SettingGrpPub.html
The defines can be added to the Raspberry Pi gateway by following the instructions on https://www.mysensors.org/build/raspberry#advancedI have not heard about anyone using the Cubieboard but hopefully someone else has. The information provided on https://www.mysensors.org/build/orange might be useful if the Cubieboard is similar to the Orange Pie.
oh, and in case you haven't already, see the ./configure --help text about the most common NRF24 defines; you might not need the advanced build options.
-
Thank you, @mfalkvidd. Ihave a little troubles with correct defining gpios from Cubie. In fex file the gpios defines is:
[gpio_para]
gpio_used = 1
gpio_num = 2
gpio_pin_1 = port:PH07<0><default><default><default>
gpio_pin_2 = port:PH15<6><default><default><default>
in sys/gpio:
[root@Archey boot]# ls -ls /sys/class/gpio/
total 0
0 --w------- 1 root root 4096 Nov 21 11:58 export
0 lrwxrwxrwx 1 root root 0 Nov 18 17:01 gpio1_ph7 -> ../../devices/platform/gpio-sunxi/gpio/gpio1_ph7
0 lrwxrwxrwx 1 root root 0 Nov 21 11:54 gpio2_ph15 -> ../../devices/platform/gpio-sunxi/gpio/gpio2_ph15
0 lrwxrwxrwx 1 root root 0 Nov 18 10:45 gpiochip1 -> ../../devices/platform/gpio-sunxi/gpio/gpiochip1
0 --w------- 1 root root 4096 Nov 18 16:52 unexportWhen i define in configure: --my-rf24-ce-pin=1 --my-rf24-cs-pin=2 build is ok, but test failed with error:
Nov 21 11:58:15 ERROR Could not open /sys/class/gpio/gpio1/direction[root@Archey MySensors]#
when i define --my-transport=nrf24 --my-rf24-ce-pin=gpio1_ph7 the build failed wirh error:
./drivers/RF24/RF24.cpp: In function 'void RF24_ce(bool)':
<command-line>:0:16: error: 'gpio1_ph7' was not declared in this scope
./drivers/RF24/RF24.cpp:52:17: note: in expansion of macro 'MY_RF24_CE_PIN'
hwDigitalWrite(MY_RF24_CE_PIN, level);How can i resolve this problem? Please help.
-
I just see for another app using nrf24 on cubieboard
and funcrtion to use nrf24 have GPIO defining is RF24 radio(SUNXI_GPB(10), SUNXI_GPB(11), "/dev/spidev0.0");
GPIO set using this style: SUNXI_GPB(10), this type of gpio defined in #include "gpio_sun4i.h" file. Maybe this specific defining in ARCHLINUX ARM distro.
-
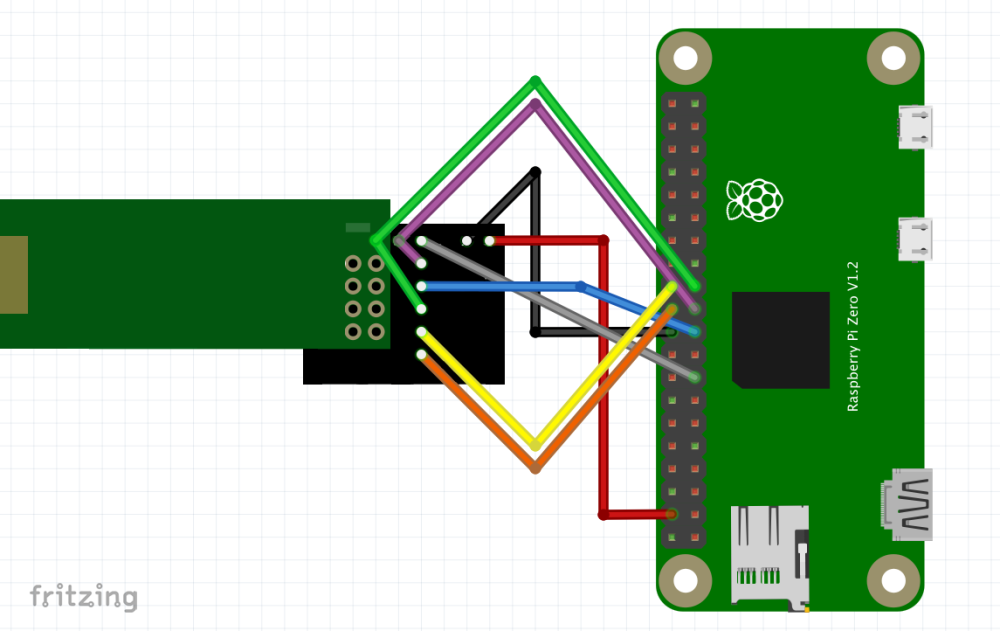
I hereby donate these images:
-
In case someone can help @артем-тихонович, please post the answer in https://forum.mysensors.org/post/95304 so we don’t unnecessarily discuss the same thing in separate threads.
-
I get weird errors when "make"ing. Branch master.
My command:
sudo ./configure --my-transport=rf24 --my-rf24-irq-pin=15 --my-signing-debug --my-signing=password --my-security-password=ZZZZZZZZZZ --my-gateway=mqtt --my-controller-ip-address=127.0.0.1 --my-mqtt-user=XXXX --my-mqtt-password=YYYYY --my-mqtt-publish-topic-prefix=mysensors-out --my-mqtt-subscribe-topic-prefix=mysensors-in --my-mqtt-client-id=mygateway1 --my-leds-err-pin=12 --my-leds-rx-pin=16 --my-leds-tx-pin=18 --my-config-file=/etc/mysensors.confM -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp: In function ‘bool signerAtsha204SoftGetNonce(MyMessage&)’: ./core/MySigningAtsha204Soft.cpp:173:55: error: no matching function for call to ‘min(unsigned int, int)’ msg.set(_signing_verifying_nonce, MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3453:5: note: candidate: template<class _Tp, class _Compare> constexpr _Tp std::min(std::initializer_list<_Tp>, _Compare) min(initializer_list<_Tp> __l, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algo.h:3453:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:173:55: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ msg.set(_signing_verifying_nonce, MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3447:5: note: candidate: template<class _Tp> constexpr _Tp std::min(std::initializer_list<_Tp>) min(initializer_list<_Tp> __l) ^~~ /usr/include/c++/6/bits/stl_algo.h:3447:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:173:55: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ msg.set(_signing_verifying_nonce, MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:243:5: note: candidate: template<class _Tp, class _Compare> constexpr const _Tp& std::min(const _Tp&, const _Tp&, _Compare) min(const _Tp& __a, const _Tp& __b, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algobase.h:243:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:173:55: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) msg.set(_signing_verifying_nonce, MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:195:5: note: candidate: template<class _Tp> constexpr const _Tp& std::min(const _Tp&, const _Tp&) min(const _Tp& __a, const _Tp& __b) ^~~ /usr/include/c++/6/bits/stl_algobase.h:195:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:173:55: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) msg.set(_signing_verifying_nonce, MIN(MAX_PAYLOAD, 32)); ^ ./core/MySigningAtsha204Soft.cpp: In function ‘void signerAtsha204SoftPutNonce(MyMessage&)’: ./core/MySigningAtsha204Soft.cpp:190:89: error: no matching function for call to ‘min(unsigned int, int)’ (void)memcpy((void *)_signing_nonce, (const void *)msg.getCustom(), MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3453:5: note: candidate: template<class _Tp, class _Compare> constexpr _Tp std::min(std::initializer_list<_Tp>, _Compare) min(initializer_list<_Tp> __l, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algo.h:3453:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:190:89: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ (void)memcpy((void *)_signing_nonce, (const void *)msg.getCustom(), MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3447:5: note: candidate: template<class _Tp> constexpr _Tp std::min(std::initializer_list<_Tp>) min(initializer_list<_Tp> __l) ^~~ /usr/include/c++/6/bits/stl_algo.h:3447:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:190:89: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ (void)memcpy((void *)_signing_nonce, (const void *)msg.getCustom(), MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:243:5: note: candidate: template<class _Tp, class _Compare> constexpr const _Tp& std::min(const _Tp&, const _Tp&, _Compare) min(const _Tp& __a, const _Tp& __b, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algobase.h:243:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:190:89: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) (void)memcpy((void *)_signing_nonce, (const void *)msg.getCustom(), MIN(MAX_PAYLOAD, 32)); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:195:5: note: candidate: template<class _Tp> constexpr const _Tp& std::min(const _Tp&, const _Tp&) min(const _Tp& __a, const _Tp& __b) ^~~ /usr/include/c++/6/bits/stl_algobase.h:195:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:190:89: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) (void)memcpy((void *)_signing_nonce, (const void *)msg.getCustom(), MIN(MAX_PAYLOAD, 32)); ^ ./core/MySigningAtsha204Soft.cpp: In function ‘bool signerAtsha204SoftSignMsg(MyMessage&)’: ./core/MySigningAtsha204Soft.cpp:229:50: error: no matching function for call to ‘min(unsigned int, int)’ MIN(MAX_PAYLOAD-mGetLength(msg), 32)); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3453:5: note: candidate: template<class _Tp, class _Compare> constexpr _Tp std::min(std::initializer_list<_Tp>, _Compare) min(initializer_list<_Tp> __l, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algo.h:3453:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:229:50: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ MIN(MAX_PAYLOAD-mGetLength(msg), 32)); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3447:5: note: candidate: template<class _Tp> constexpr _Tp std::min(std::initializer_list<_Tp>) min(initializer_list<_Tp> __l) ^~~ /usr/include/c++/6/bits/stl_algo.h:3447:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:229:50: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ MIN(MAX_PAYLOAD-mGetLength(msg), 32)); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:243:5: note: candidate: template<class _Tp, class _Compare> constexpr const _Tp& std::min(const _Tp&, const _Tp&, _Compare) min(const _Tp& __a, const _Tp& __b, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algobase.h:243:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:229:50: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) MIN(MAX_PAYLOAD-mGetLength(msg), 32)); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:195:5: note: candidate: template<class _Tp> constexpr const _Tp& std::min(const _Tp&, const _Tp&) min(const _Tp& __a, const _Tp& __b) ^~~ /usr/include/c++/6/bits/stl_algobase.h:195:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:229:50: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) MIN(MAX_PAYLOAD-mGetLength(msg), 32)); ^ ./core/MySigningAtsha204Soft.cpp: In function ‘bool signerAtsha204SoftVerifyMsg(MyMessage&)’: ./core/MySigningAtsha204Soft.cpp:283:55: error: no matching function for call to ‘min(unsigned int, int)’ MIN(MAX_PAYLOAD-mGetLength(msg), 32))) { ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3453:5: note: candidate: template<class _Tp, class _Compare> constexpr _Tp std::min(std::initializer_list<_Tp>, _Compare) min(initializer_list<_Tp> __l, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algo.h:3453:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:283:55: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ MIN(MAX_PAYLOAD-mGetLength(msg), 32))) { ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3447:5: note: candidate: template<class _Tp> constexpr _Tp std::min(std::initializer_list<_Tp>) min(initializer_list<_Tp> __l) ^~~ /usr/include/c++/6/bits/stl_algo.h:3447:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:283:55: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned int’ MIN(MAX_PAYLOAD-mGetLength(msg), 32))) { ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:243:5: note: candidate: template<class _Tp, class _Compare> constexpr const _Tp& std::min(const _Tp&, const _Tp&, _Compare) min(const _Tp& __a, const _Tp& __b, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algobase.h:243:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:283:55: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) MIN(MAX_PAYLOAD-mGetLength(msg), 32))) { ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:195:5: note: candidate: template<class _Tp> constexpr const _Tp& std::min(const _Tp&, const _Tp&) min(const _Tp& __a, const _Tp& __b) ^~~ /usr/include/c++/6/bits/stl_algobase.h:195:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:283:55: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned int’ and ‘int’) MIN(MAX_PAYLOAD-mGetLength(msg), 32))) { ^ ./core/MySigningAtsha204Soft.cpp: In function ‘void signerCalculateSignature(MyMessage&, bool)’: ./core/MySigningAtsha204Soft.cpp:307:48: error: no matching function for call to ‘min(uint8_t&, int)’ uint8_t bytes_to_include = MIN(bytes_left, 32); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3453:5: note: candidate: template<class _Tp, class _Compare> constexpr _Tp std::min(std::initializer_list<_Tp>, _Compare) min(initializer_list<_Tp> __l, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algo.h:3453:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:307:48: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned char’ uint8_t bytes_to_include = MIN(bytes_left, 32); ^ In file included from /usr/include/c++/6/algorithm:62:0, from ./drivers/Linux/Arduino.h:32, from ./MySensors.h:39, from examples_linux/mysgw.cpp:82: /usr/include/c++/6/bits/stl_algo.h:3447:5: note: candidate: template<class _Tp> constexpr _Tp std::min(std::initializer_list<_Tp>) min(initializer_list<_Tp> __l) ^~~ /usr/include/c++/6/bits/stl_algo.h:3447:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:307:48: note: mismatched types ‘std::initializer_list<_Tp>’ and ‘unsigned char’ uint8_t bytes_to_include = MIN(bytes_left, 32); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:243:5: note: candidate: template<class _Tp, class _Compare> constexpr const _Tp& std::min(const _Tp&, const _Tp&, _Compare) min(const _Tp& __a, const _Tp& __b, _Compare __comp) ^~~ /usr/include/c++/6/bits/stl_algobase.h:243:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:307:48: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned char’ and ‘int’) uint8_t bytes_to_include = MIN(bytes_left, 32); ^ In file included from /usr/include/c++/6/bits/char_traits.h:39:0, from /usr/include/c++/6/ios:40, from /usr/include/c++/6/ostream:38, from /usr/include/c++/6/iostream:39, from examples_linux/mysgw.cpp:20: /usr/include/c++/6/bits/stl_algobase.h:195:5: note: candidate: template<class _Tp> constexpr const _Tp& std::min(const _Tp&, const _Tp&) min(const _Tp& __a, const _Tp& __b) ^~~ /usr/include/c++/6/bits/stl_algobase.h:195:5: note: template argument deduction/substitution failed: In file included from ./MySensors.h:148:0, from examples_linux/mysgw.cpp:82: ./core/MySigningAtsha204Soft.cpp:307:48: note: deduced conflicting types for parameter ‘const _Tp’ (‘unsigned char’ and ‘int’) uint8_t bytes_to_include = MIN(bytes_left, 32); ^ ./core/MySigningAtsha204Soft.cpp: In function ‘bool signerAtsha204SoftVerifyMsg(MyMessage&)’: ./core/MySigningAtsha204Soft.cpp:289:1: warning: control reaches end of non-void function [-Wreturn-type] } ^ Makefile:98: recipe for target 'build/examples_linux/mysgw.o' failed make: *** [build/examples_linux/mysgw.o] Error 1Can someone better versed help?
EDIT: tested branch development, no problems.
-
Could be same as https://forum.mysensors.org/topic/10036/unable-to-compile-raspberry-pi-gateway-when-signing-enable
-
@mfalkvidd It sure looks the same. I did a fresh git clone to update my gateway, so shouldn't it be fixed? From what appears on github it looked fixed..
EDIT appears fixed in development branch. But not master?
-
@masmat said in
 Building a Raspberry Pi Gateway:
Building a Raspberry Pi Gateway:EDIT appears fixed in development branch. But not master?
Yes that is correct
-
hi,
is it possible to conect NRF24 to SPI1 channel on RBpi3?
(i mean pins 26, 35, 36,38,40)??
-
Welcome to the forum @robert-król
I have not tried it myself, but I beleive https://forum.mysensors.org/post/76079 shows how to do it.
-
Hello
Is it possible to redefine pin used for DI00 with rfm69 (with configure option for example) ?
Indeed, DI00 is on pin 22 on raspberry, and pin 2 on arduino.
But with NRF, pin 2 on arduino is for IRQ, which is connected to pin 15 on raspberry.So if it was possible to force pin 15 for DI00, we could use adaptator card like this one https://www.mysensors.org/hardware/nrf2rfm69.
-
Hi, just build an Ethernet gateway on a raspberry pi B+ following the instructions on this site. And it works! I'm running raspbian stretch lite and used the master branch. No issues. I use the RFM69 radio and this gateway has the HW model. I did have to update al my nodes to use the new RFM69 drivers but that was clearly mentioned in the article.
I have two questions:- In this section :
log_pipe=0 log_pipe_file=/tmp/mysgw.pipeIs this correct, I think there should be a 1 to enable this type of logging.
- When a new version of mysensors is released, how do I update the gateway version on the raspberry pi?
And here is a picture of my work:

Thanks for the effort you put into this project!
-
Has the issue with RFM automatic transmission control been addressed?
-
@kted Can you give me a pointer to the details of this issue? I'm willing to do some tests and report back my findings. Some info about my configuration, I have 5 nodes at this moment, all battery feeded, they are sending only nodes. They all work but they have a interval of several minutes between sending. The gateway is connected to Domoticz running on another Raspberry PI.
-
@rolo6442u I built an Raspberry gateway using an RFM69 radio, to replace one built around a NodeMCU.
All nodes are transmit only, and using the latest stable API.
I noticed that all sensors were using max TX power after the first couple of transmissions, although they were respecting the ATC setting before, and were using minimum power most of the time.
Now I am concerned about battery life, so I switched back to the NodeMCU gateway, waiting for a fix.
I'll put together a temporary net, with a RPi0 gateway and a single node later, to show some real data, if you need any more information.
-
@kted I wil do some tests to check if I see this behavior. Just build a simple test node with a pushbutton, on 2 AA batteries. This node has the low power W radio module. How did you discover/measure that the max TX power was used?
-
@kted could be the same problem as discussed in https://forum.mysensors.org/topic/9796/rfm69-atc-not-working/
-
@rolo6442u From what the node itself reports from transportGetSignalReport(SR_TX_POWER_PERCENT). It starts from say 50%, and after a coule of transmissions it goes up to 100%, when the nodes are 1m apart. When using a stand alone ESP8266 gateway, it drops to 0%.
I'll have the nodes ready in a couple of hours, after I come home from work...
-
Did some tests and I do see the TX power climbing to 100% after a few transmits :
-42 :transportGetReceivingRSSI() 127 :transportGetSendingRSSI() -256 :transportGetReceivingSNR() -256 :transportGetSendingSNR() 6 :transportGetTxPowerLevel() 77 :transportGetTxPowerPercent() 0 :transportInternalToRSSI(_transportSM.uplinkQualityRSSI) -46 :transportGetReceivingRSSI() -102 :transportGetSendingRSSI() -256 :transportGetReceivingSNR() -256 :transportGetSendingSNR() 7 :transportGetTxPowerLevel() 80 :transportGetTxPowerPercent() 0 :transportInternalToRSSI(_transportSM.uplinkQualityRSSI) -47 :transportGetReceivingRSSI() -102 :transportGetSendingRSSI() -256 :transportGetReceivingSNR() -256 :transportGetSendingSNR() 10 :transportGetTxPowerLevel() 90 :transportGetTxPowerPercent() 0 :transportInternalToRSSI(_transportSM.uplinkQualityRSSI) -47 :transportGetReceivingRSSI() -105 :transportGetSendingRSSI() -256 :transportGetReceivingSNR() -256 :transportGetSendingSNR() 11 :transportGetTxPowerLevel() 93 :transportGetTxPowerPercent() 0 :transportInternalToRSSI(_transportSM.uplinkQualityRSSI) -47 :transportGetReceivingRSSI() -103 :transportGetSendingRSSI() -256 :transportGetReceivingSNR() -256 :transportGetSendingSNR() 13 :transportGetTxPowerLevel() 100 :transportGetTxPowerPercent() 0 :transportInternalToRSSI(_transportSM.uplinkQualityRSSI) -47 :transportGetReceivingRSSI() -106 :transportGetSendingRSSI() -256 :transportGetReceivingSNR() -256 :transportGetSendingSNR() 13 :transportGetTxPowerLevel() 100 :transportGetTxPowerPercent() 0 :transportInternalToRSSI(_transportSM.uplinkQualityRSSI)Not sure if this has a great impact on battery life, depends on how often the node sends a message. Al my nodes have an interval of about 10 minutes. I leave the gateway running for now. Having it running on this PI is a great advantage for me. Will try to do some current measurement on this node and calculate what the impact is on battery life.
-
@barrydou I gave a double gateway running on my raspberry both nrf24 and rfm69, still on v. 2.2
-
@gohan Nice. I was thinking to do that same at some time, but I wasn't sure if the Raspberry could handle the load, since I also run domoticz on it, along with pi-hole.
How many devices do you have on each gateway?
-
I got the same, domoticz and pi hole, but the load of the gateway is minimal
-
@gohan I meant multiple gateways on the same raspberry.
Right now, I have an NRF24L01 gateway, Domoticz, pi-hole, and a VPN server running, with 2 more gateways connected, one local and one remote RFM69 on ESP8266.
It would be nice if I could combine the two local gateways, the RFM and the NRF on the same Raspberry's GPIO...
-
Yes, I have both radios on the same raspberry.
-
More problems when I try to "make" after configuring. Tried with and without sudo...
dietpi@Domoticz:~/MySensors$ sudo make gcc -MT build/hal/architecture/Linux/drivers/core/log.o -MMD -MP -march=armv6zk -mtune=arm1176jzf-s -mfpu=vfp -mfloat-abi=hard -DMY_SIGNING_SIMPLE_PASSWD=\"ZZZZZZZ\" -DMY_RADIO_RF24 -DMY_GATEWAY_LINUX -DMY_GATEWAY_MQTT_CLIENT -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_CONFIG_FILE=\"/etc/mysensors.conf\" -DMY_DEFAULT_TX_LED_PIN=18 -DMY_DEFAULT_RX_LED_PIN=16 -DMY_DEFAULT_ERR_LED_PIN=12 -DMY_MQTT_CLIENT_ID=\"mygateway1\" -DMY_MQTT_SUBSCRIBE_TOPIC_PREFIX=\"mysensors-in\" -DMY_MQTT_PUBLISH_TOPIC_PREFIX=\"mysensors-out\" -DMY_MQTT_PASSWORD=\"YYYYY\" -DMY_MQTT_USER=\"XXXX\" -DMY_CONTROLLER_IP_ADDRESS=127,0,0,1 -DMY_DEBUG_VERBOSE_SIGNING -DMY_RX_MESSAGE_BUFFER_FEATURE -DMY_RF24_IRQ_PIN=15 -Ofast -g -Wall -Wextra -I. -I./core -I./hal/architecture/Linux/drivers/core -I./hal/architecture/Linux/drivers/BCM -c hal/architecture/Linux/drivers/core/log.c -o build/hal/architecture/Linux/drivers/core/log.o In file included from hal/architecture/Linux/drivers/core/log.c:20:0: hal/architecture/Linux/drivers/core/log.h:24:19: fatal error: stdio.h: File not found #include <stdio.h> ^ compilation terminated. Makefile:102: recipe for target 'build/hal/architecture/Linux/drivers/core/log.o' failed make: *** [build/hal/architecture/Linux/drivers/core/log.o] Error 1EDIT: ...and here's the fix: "sudo apt-get install g++" (I'm using DietPi now to make it lighter for Pi Zero W).
-
Running Version 2.3.2-beta just cloned today. On a raspberry pi B rev2.
A little bug/problem I have discovered with the MQTT gateway.When you run the gateway with command and switch:-
mysgw -c /etc/mysensors.confIt segfaults.
When its run with the command and switch :-
mysgw --config-file /etc/mysensors.confIt works fine
I was playing with the ethernet gateway compile and the -c worked fine.
-
Another thing I have found is I cannot get any logging working with the mqqt gateway compile.It worked fine (named pipe) with the ethernet gateway compile.Edit
It seems logging with the mqtt is not instant. It seem to dump the log out of memory periodically, is this expected? Makes it a bit hard to debug real-time.
-
Just use mqtt client
-
@coza I have experienced that the raspberry pigateway does not flush the logs immediately when logging to file. Syslog logs immediately though. See if switching to syslog helps.
-
@gohan Sorry I miss your answer a few days ago
I don't want to a gateway with both rfm69 and nrf24..I'm planning to change my nrf24 sensors with rfm69, to have a better transmission distance. My two nodes are outside, and i have communication trouble if i put them where i wanted, specially for my rain gauge.
So I wanted to use those adaptors https://www.openhardware.io/view/16/NRF2RFM69.
I received them, and I'm still waiting RFM69 board to test it.But as the pinout is not the same between nrf24 and rfm69 on raspberry gateway, I could not use the adaptor on the gateway. So before making a new board for my raspberry, I wanted to know if it's possible to change the default pin configuration, to have exactly the same as nrf24, and use an adaptor on the gateway too.
For that, I "just" need to redefine DIO0 on pin 15 (default is 22). So I wonder if it's possible to do it.And "bonus question", I'd like to know why pin configuration is not the same between arduino and raspberry. Why pin 15 is not used for DIO0 on raspberry (equivalent to pin 2 on arduino). I'm telling myself it should be a good reason, but I don't get it.
-
@barrydou is this what you need (from the documentation and ./configure--help)
--my-rfm69-irq-pin=<PIN> Pin number connected to RFM69 IRQ pin.For the bonus question: I wasn't aware that there was a mapping between Raspberry Pi gpio and Arduino pins. Could you share he rest of the list?
-
@mfalkvidd I don't know what DI00 is, and if it's equivalent to IRQ ? If Yes, it's exactly what I need ! Thank you !!!
") I will test it as soon as I get my RFM69
I will test it as soon as I get my RFM69Here is the pin mapping between RFM69W/NRF24 and Arduino/Raspberry
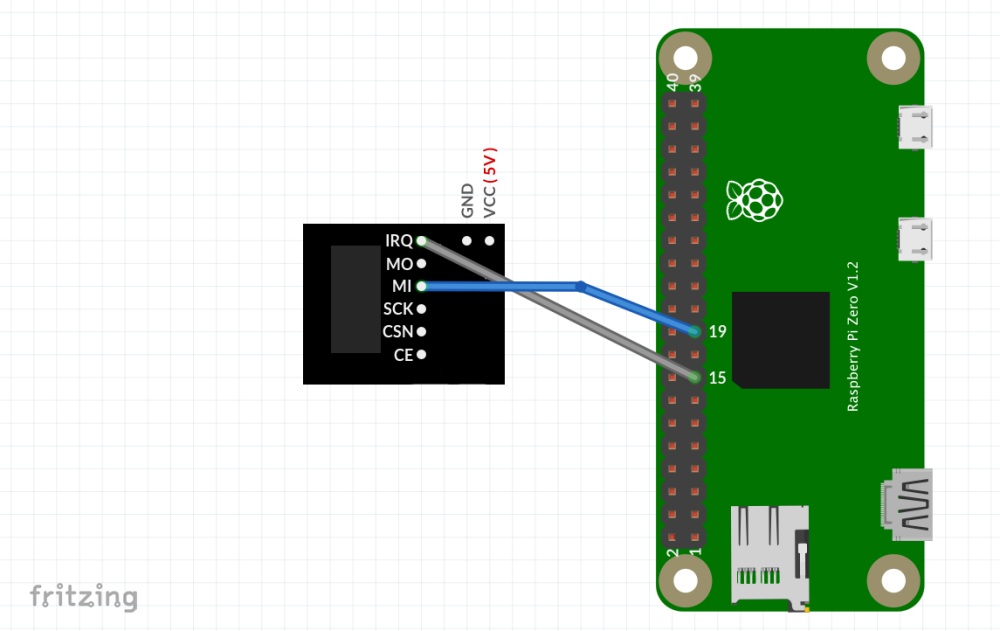
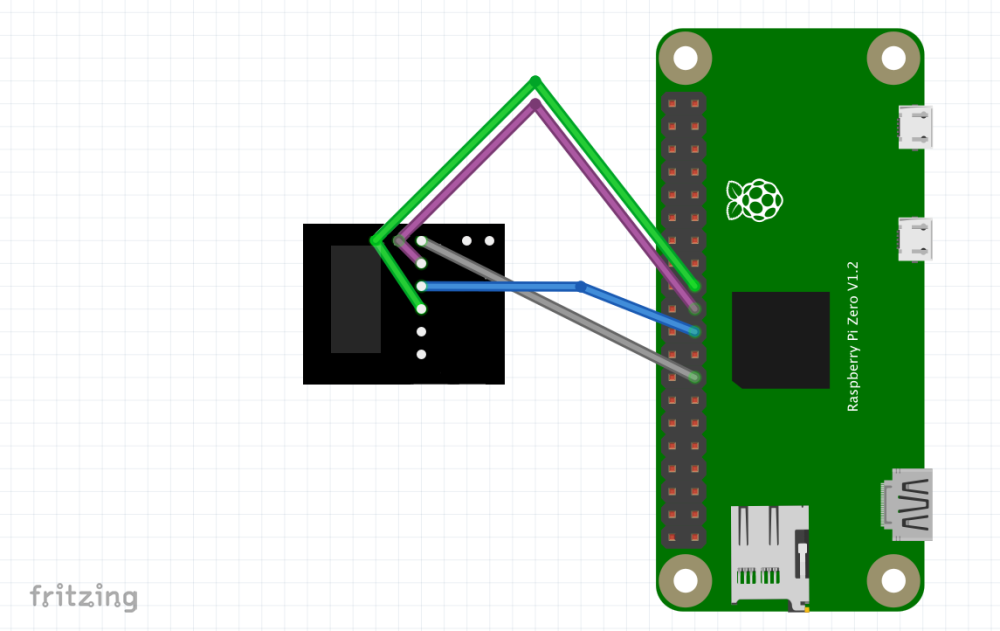
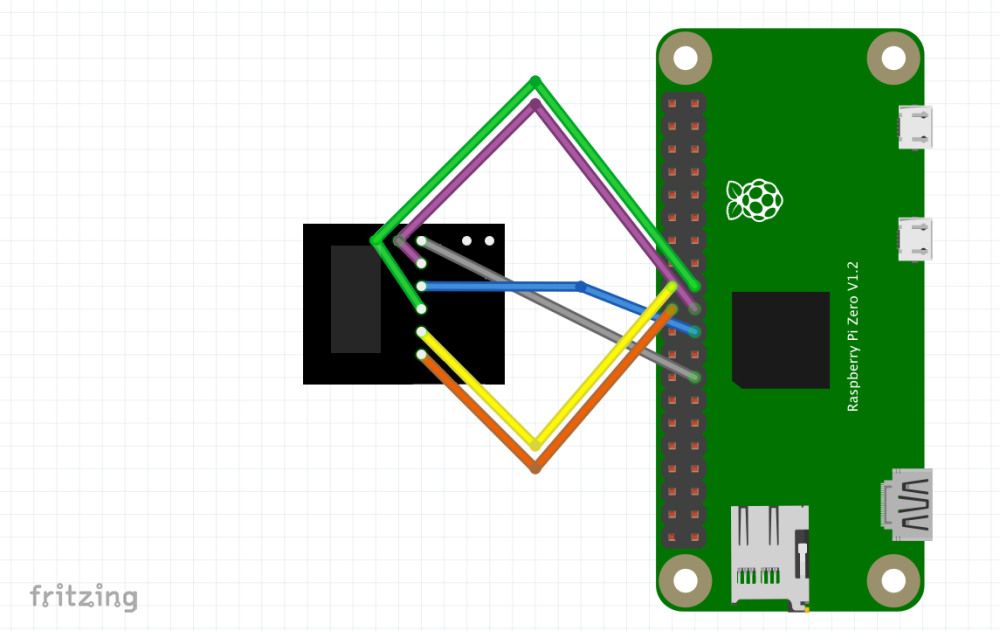
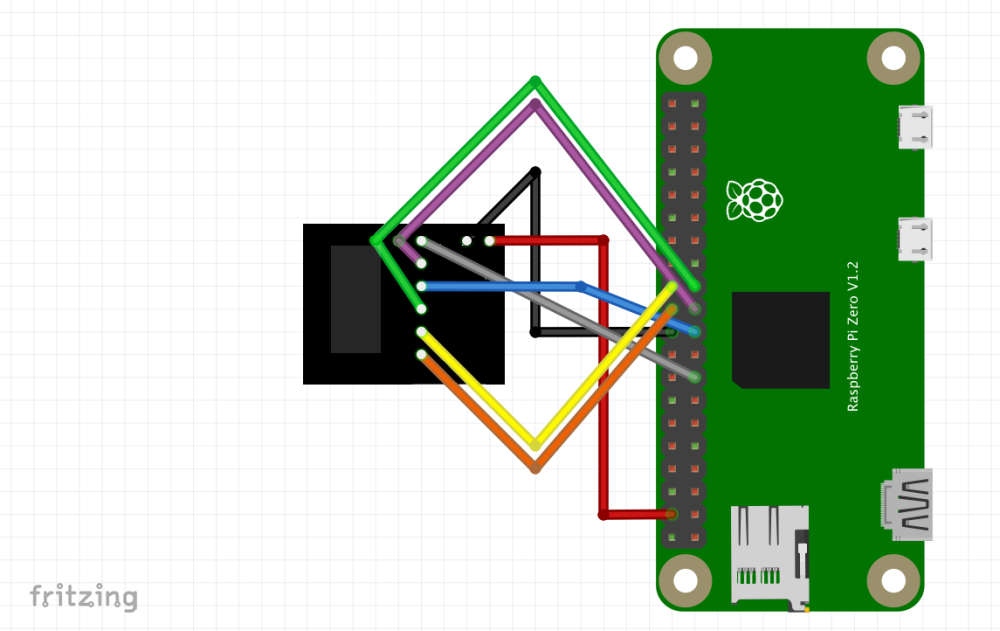
Arduino mini - NRF24 - RFM69 - Raspberry GW NRF - Raspberry GW RFM 9 - CE - N/A - 22 - N/A 10 - CSN/CS - NSS - 24 - 24 13 - SCK - SCK - 23 - 23 11 - MOSI - MOSI - 19 - 19 12 - MISO - MISO - 21 - 21 2 - IRQ - DI00 - 15 - 22So, the only mismatch breaking pin compatibility (and preventing to use adaptors on the raspberry pi gateway) is on IRQ/DI00. Adaptors wire RFM69 DI00 on NRF24 IRQ pin, but they don't use, by default, the same pin on raspberry, depending the radio type.
-
@barrydou I don't know what dio0 is either, but https://learn.sparkfun.com/tutorials/rfm69hcw-hookup-guide/all describes it like this:
Digital I/O 0
RX interrupt Received data ready interrupt signal from RFM69HCW to microcontrollerwhich sounds like it could be interrupt. It might be worth a try at least.
-
@mfalkvidd Thank you.
I've found that too https://www.mysensors.org/apidocs/RFM69_8h_source.html
It's clearly indicated that DIO0 is IRQ.So I think with "--my-rfm69-irq-pin=" it will do the job.
I'll test it as soon as i'll receive RFM69.
Thank you again
-
@marceloaqno Sorry to kick this old topic, but I will soon be trying to build my gateway with a Raspberry pi. I was wondering if the capacitor is also required for the gateway, or just for the nodes?
Because at the instruction page on how to wire and build a Raspberry Pi gateway, the capacitor isn't mentioned.
I'll be using a RPI 1 and NRF24L01+
-
@rolandow yes the capacitor is needed. I'll add that info to the page. Thanks for noticing.
-
Ok, one more question. I thought I read somewhere that the wiring between the RPI and de radio should be as short as possible, but I can't find exactly where I read that anymore.
At another project (zigbee2mqtt) I read that users had better reception when they placed the transceiver further away from the controller, because there was less inteference. So if possible, I would like to use a piece of UTP cable to wire the radio to the raspberry pi. That way I can put the rpi inside a closet, but the radio outside.
So I am not sure if longer wires (say 2, 3 meters) is going to be a problem?
-
@rolandow there could be a problem.
There are two things to consider.
-
Power drop due to resistance in the cable. See https://electronics.stackexchange.com/questions/113253/voltage-drop-and-safe-current-load-on-cat5-cable for details but use the current used by the radio (provided in the datasheet) instead of the 2.5A used in that question.
-
SPI communication problems due to capacitance in the cable. See https://electronics.stackexchange.com/questions/163468/spi-max-distance for details. See also my post at https://forum.mysensors.org/post/92967 for oscilloscope pictures of what an i2c signal can look like through a long cable. SPI can handle longer cable lengts than i2c though.
-
-
-
For me, my electronics is not as good as my development skills ;-). But I gave it a try. According to the datasheet the NRF24 will consume about 14 mA max. My cable is 2 m max, so then the resistance is 0,16ohms. So if I understand correctly the voltage drop would be 0,00224 volt. Sounds neglegtable to me? Also; can't I just measure the voltage at the end of the cable once it's connected to the RPI?
-
At the stackoverflow page somebody says: "In an answer on a Microchip forum, Jan Axelson, author of 'Serial Port Complete', claims a maximum cable length of 10' for the SPI bus. Other posts have mentioned the same figure.". So 10" is about 3 metres, so I am within that range. I do understand though that this isn't a preferred thing to do.
Which makes me wonder how other people handle this. I mean; I think ideally you'd want the radio that is connected to the controller in the most 'center' way of the home, right? So do people just hange the Pi and the whole shebang to the ceiling?
") I'd rather put the controller in the closet where my modem and router are, and then only wire the receiver to outside the closet. Isn't there a better way to do this?
I'd rather put the controller in the closet where my modem and router are, and then only wire the receiver to outside the closet. Isn't there a better way to do this?
-
-
Nice work @rolandow
You can measure the voltage drop, if you put a load of 14mA on the cable. But without load, there will be no voltage drop.One small adjustment on your calculation: there will be 4m cable (2m to the radio and 2m back). But the drop will still be negligable for a normal nrf24.
-
Please edit the image used in this tutorial:
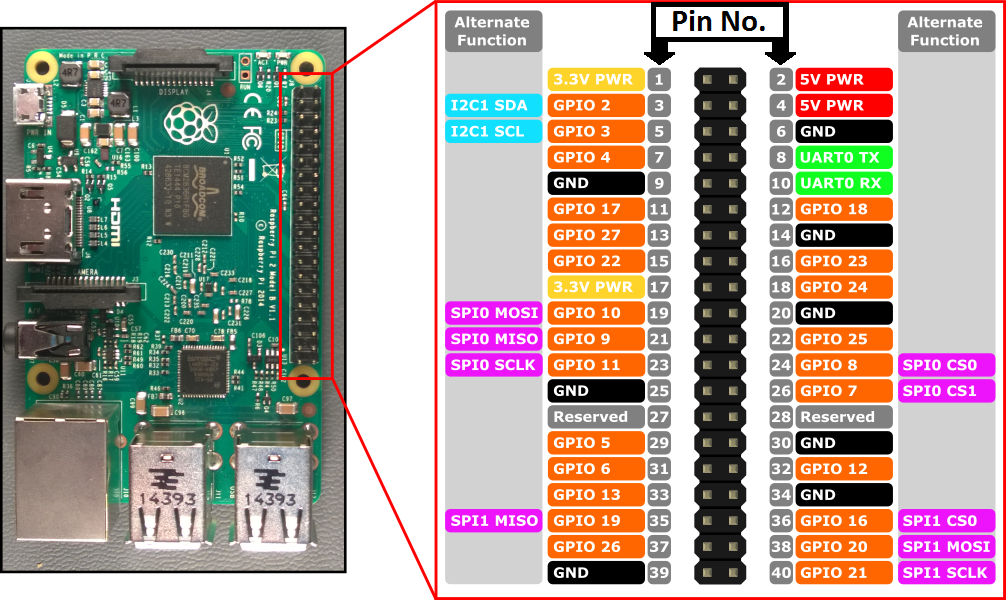
It is wrong and misleading, as it says that pin36 is SPI1 CS0. In fact SPI1 CS0 by default is pin12. To be able to use pin36 as SPI1 CS0 one have to follow implicit steps which can be found on this forum thread: https://www.raspberrypi.org/forums/viewtopic.php?t=203776.
Also it would be useful to add instructions to enable SPI1 in /boot/config.txt to the tutorial.
-
I want to run this gateway with another networkid (RFM69) but can't find how to do this. The option --my-rfm69-networkid=105 in the config line is ignored. So maybe it should go in the mysensnsors.conf file, but what is the syntax of this option?
Thanks.
-
@rolo6442u where did you find
my-rfm69-networkid? I don't think such an option has ever existed. If you found it somewhere we probably need to update that documentation.Follow the instructions at https://www.mysensors.org/build/raspberry#advanced to set defines.
-
@mfalkvidd
I did not found it, I kind of made it up, following the syntax of other options.
Looks like there is no way of changing the ID at this moment for the PI gateway.
-
@rolo6442u ok. Well, making things up will usually not add them to the code
There is a way. Two actually. Set the define in one of the two ways described on the link I provided.
-
@mfalkvidd
Thanks, will take a look at that.
-
Is it also possible to read a sensor directly at the Raspberry Pi MQTT Gateway? I only want to send the status of a GPIO via MQTT. Is there an example code for this combination?
-
Might be nice to know it compilation still seems to works fine on Raspbian Buster on a Raspberry Pi 4.
// Update: unlike on the Pi 3 I now had to activate SPI. Might be good to make that more prominent in the explanation now.
-
@alowhum to my knowledge, activating SPI has always been required, unless the user has already activated SPI by some other means.
Do you have a suggestion on how to make it more prominent that what it is now? Preferably without contributing too much to the pileup of notices that scare users - everything is super-important to at least 1 person.
-
@mfalkvidd I don't know, perhaps mention it as something that has to be done upfront instead of something that might need to be done if there is an error?
I'm not having any luck actually getting the radio to work. I now noticed this warning during compilation:
g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -DMY_RADIO_RF24 -DMY_GATEWAY_LINUX -DMY_GATEWAY_MQTT_CLIENT -DMY_DEBUG -DLINUX_SPI_SPIDEV -DMY_MQTT_CLIENT_ID=\"mygateway1\" -DMY_MQTT_SUBSCRIBE_TOPIC_PREFIX=\"mysensors-in\" -DMY_MQTT_PUBLISH_TOPIC_PREFIX=\"mysensors-out\" -DMY_CONTROLLER_IP_ADDRESS=127,0,0,1 -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o drivers/Linux/GPIO.cpp: In constructor ‘GPIOClass::GPIOClass()’: drivers/Linux/GPIO.cpp:53:18: warning: ‘%s’ directive writing up to 255 bytes into a region of size 48 [-Wformat-overflow=] sprintf(file, "/sys/class/gpio/%s/base", de->d_name); ^~~~~~~~~~~~~~~~~~~~~~~~~ drivers/Linux/GPIO.cpp:53:11: note: ‘sprintf’ output between 22 and 277 bytes into a destination of size 64 sprintf(file, "/sys/class/gpio/%s/base", de->d_name); ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ drivers/Linux/GPIO.cpp:62:18: warning: ‘%s’ directive writing up to 255 bytes into a region of size 48 [-Wformat-overflow=] sprintf(file, "/sys/class/gpio/%s/ngpio", de->d_name); ^~~~~~~~~~~~~~~~~~~~~~~~~~ drivers/Linux/GPIO.cpp:62:11: note: ‘sprintf’ output between 23 and 278 bytes into a destination of size 64 sprintf(file, "/sys/class/gpio/%s/ngpio", de->d_name); ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-
Could this be an issue?
./configure without any additional parameters gives:
[SECTION] Detecting target machine. [OK] machine detected: SoC=unknown, Type=unknown, CPU=armv7l.The rest looks fine:
[SECTION] Checking GPIO Sysfs. [OK] /sys/class/gpio/export found. [SECTION] Detecting SPI driver. [OK] SPI driver detected:SPIDEV. [SECTION] Gateway configuration. [OK] Type: ethernet. [OK] Transport: rf24. [OK] Signing: Disabled. [OK] Encryption: Disabled. [OK] CPPFLAGS: -DMY_RADIO_RF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV [SECTION] Detecting init system. [OK] Init system detected: systemd. [SECTION] Saving configuration. [OK] Saved. [SECTION] Cleaning previous builds. [OK] Finished.Same thing happens with the dev version
-
Yes, if the configure script cannot detect which hardware to use, compilation failure could very well be the result.
-
Hi All
I'm just venturing into this world of building my own sensors - but perhaps i am a tad late? Two months since last update.. Typically me - showing up to the party when everybody else has left.
My main issue is, i am running the Raspberry Pi 4 - and when trying to build (i've tried both the development and master builds) i get from 4 (master build) to A BUNCH (development) of errors. First of all, the autodetect of SoC does not work for me either (just like @alowhum, and with the same warnings), and when using --help the actual SoC is not listed either, so should i just assume it does not work for Raspberry Pi 4?
Is there any chance the 4 will be supported soon?
Just a note - i can actually complete the configure and then make - but unfortunately i just get a TSP error when trying to fire up the radio.
Hope i can get this working as it was the main reason for upgrading my RaspberryPi version 1 to a version 4

Thanks in advance for any and all help!
-
Thanks for sharing your experience @swedchef
From the problems reported by users (you included), it seems like the rpi4 is quite different fom the earlier rpis. To add support, the following ingredients are needed in one person
- person needs to have sufficient knowledge and skills to figure out how to support the rpi4
- person needs to have sufficient time to do the work
- person needs to have a rpi4
- person needs to be sufficiently interested/motivated to do the work
It seems like, so far, we haven't found this person (or this person hasn't found us).
-
Re:
Building a Raspberry Pi GatewayHi all,
i compile with success the gateway in Raspberry PI 4 (with some code modification)
this is not perfect.. but it works.
if someone wants to try, i upload the gateway compiled with this options :
--my-transport=rf24 --my-gateway=ethernet --my-port=5003
-
@phildefer could you please share what you changed? The security concerned might not be comfortable running a binary with unspecified changes that manages their home automation setup. Especially not a project supposed to be open source.
-
@phildefer would you mind sharing the code modifications that were needed?
-
@mfalkvidd @Anticimex : yes i sharing the code perhaps this week end. I need to find time to make a PR to GITHUB
As I said, my code may not be as clean as you'd like, but it works.
-
Hey all,
I got the same problem as @swedchef and saw the warnings @alowhum mentioned.
Simply upping the buffer that is declared in GPIO.cpp solved the warnings and made it compile without issue but the radio still won't work.
Maybe it has to do with the soc not being detected, as mentioned, and that the pin positions on the new soc are different from previous ones.@phildefer, weekend has come and gone buddy. Patience is a virtue some do not have.
Edit: So looking a little more through the files today i see that configure looks for the soc type in /proc/cpuinfo and funnily my raspi 4 reports a BCM2835
-
@patrikr76 I beleive @phildefer pushed the code 4 days ago. See https://github.com/mysensors/MySensors/pull/1353
Something has seriously mangled whitespace in the modified code, but apart from that it looks good to me, but I am not that familiar with the rpi code and I have not tested it myself.
-
@mfalkvidd said in
Building a Raspberry Pi Gateway:@patrikr76 I beleive @phildefer pushed the code 4 days ago. See https://github.com/mysensors/MySensors/pull/1353
You are correct.
@phildefer, thank you.
There were a couple of minor warnings about indentations and the buffer size i mentioned earlier fixed by upping the declared buffer in GPIO.cpp. Not sure if that is a good fix or not, the warning goes away though.
A few other warnings looks like this:In member function ‘char* MyMessage::getString(char*) const’, inlined from ‘bool transportSendWrite(uint8_t, MyMessage&)’ at ./core/MyTransport.cpp:987:2, inlined from ‘bool transportRouteMessage(MyMessage&)’ at ./core/MyTransport.cpp:560:40, inlined from ‘void stUplinkTransition()’ at ./core/MyTransport.cpp:252:29: ./core/MyMessage.cpp:284:17: warning: ‘char* strncpy(char*, const char*, size_t)’ output may be truncated copying between 0 and 25 bytes from a string of length 25 [-Wstringop-truncation] (void)strncpy(buffer, this->data, this->getLength()); ~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~Not sure how to fix those.
Edit: Forgot to mention, it seems to be working though.
-
Thanks guys for the effort to port MySensors for the Pi 4.
I'm very interested, but my coding skills are not sufficient to help in the development. Maybe I can do some debug when my Pi4 will arrive
MySensors for the Pi4 is a must-have!

-
I can confirm that the code compiles and runs on my rasbperry pi 4 model b. I am using a rfm69 radio and that seems to be working too. I couldn't test it yet though since I haven't wired any rfm69 nodes up yet.
-
@kiesel Good news!
I will test both (nrf24 and rfm69) when my Pi 4 arrive.
-
Ok my Pi 4 is arrived. I have 2 gateway, one RFM69 and one NRF24 connected respectively to spi0 and spi1. Details here.
With a Raspberry Pi 3 all works fine (compilation and execution) with both Rasbian Stretch and with Raspbian Buster.
With a Raspberry Pi 4 and the same version of Rasbian Buster the situation is a bit different:
-
The RFM69 gateway on the SPI0 compiles and can be executed without problems. In this days I don't have an RFM69 radio module, so I don't know if it works, but the daemon start in a regular way.
-
The NRF24 gateway compile, but after few seconds of execution the daemon stops with the following error.
Oct 26 13:59:47 ERROR Could not open /sys/class/gpio/gpio12/directionConsidering that the same configuration works for a Pi 3, it is possible that the error is caused by the autodetect of SoC issue mentioned above?
The details of my /boot/config.txt file are here
-
-
Update:
-
tested the RFM69 gateway with a radio module attached -> Not working
-
tried to compile and execute the NRF24 gateway on the first spi bus (--spi-spidev-device=/dev/spidev0.0) -> same error as above
ERROR Could not open /sys/class/gpio/gpio12/directionI have checked my Makefile and configure files and they don't contain the modification proposed by @phildefer . Is this normal? I'm using the development branch.
-
-
Tested with this commit of @phildefer, now both gateways compiles and starts but for both I got this error.
Oct 27 20:50:41 DEBUG !TSM:INIT:TSP FAIL
-
Hi, if someone needs more info (debug, log, etc...) I'm here.
I can perform tests on Rpi 3 and Rpi 4 (Raspbian Buster) with NRF24 and RFM69 radio modules and then report the results. Not so much but maybe this can help the development.
-
I'm doing a brand new install of Openhab2 and the mysensors gateway on a new Raspberry Pi 4 after having run Openhab(1) and the mysensors gateway successfully on a Raspberry Pi 3 for years. I used the development branch of the mysensorsgateway as discussed here: https://github.com/mysensors/MySensors/pull/1364
I wrote down my step by step procedure here in case it helps someone else. I'm starting out with the pre-built Openhabian image found here: https://www.openhab.org/docs/installation/openhabian.html
Install the PiGatewaySerial using these instructions:
- First get to your Downloads directory
cd cd Downloads- Clone the MySensors repository into your Downloads directory and then go into that folder
git clone https://github.com/mysensors/MySensors.git --branch development cd MySensors- Set configuration options (you can use “./configure —help” to see your options)
a. In this case we are choosing to use the serial gateway with a pseudo terminal and a symbolic link to that pseudoterminal called ttyUSB20 in /dev. We then set the group to tty.
./configure --my-gateway=serial --my-serial-is-pty --my-serial-pty=/dev/ttyUSB20 --my-serial-groupname=ttyEdit: If building this on a 64bit operating system you will need to edit the configure file before running make. Do the following:
cp configure configure_bk nano configureFind this function
function gcc_cpu_flags { local soc=$1 case $soc inand find your CPU. In my case it is the BCM2711 (I've only done this on this one CPU so your mileage may vary) and I changed this:
BCM2711) flags="-march=armv8-a+crc -mtune=cortex-a72 -mfpu=neon-fp-armv8 -mfloat-abi=hard"to this:
BCM2711) flags="-march=armv8-a+crc -mtune=cortex-a72"Then proceed to step 4 below.
- Run make and make install
make sudo make install- We can set it to launch on boot up by running
sudo systemctl enable mysgw.service- To launch it manually right now run (skip this step to run and see output for confirmation that it works)
sudo systemctl start mysgw.service- Executable in located:
cd /usr/local/bin- need root to run it:
sudo mysgwThat's pretty much it. I was happily greeted with:
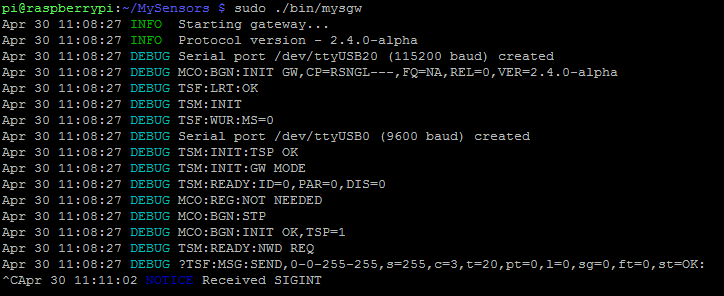
Dec 29 16:01:50 INFO Starting gateway...
Dec 29 16:01:50 INFO Protocol version - 2.4.0-alpha
Dec 29 16:01:50 DEBUG Serial port /dev/ttyUSB20 (115200 baud) created
Dec 29 16:01:50 DEBUG MCO:BGN:INIT GW,CP=RNNGL---,FQ=NA,REL=0,VER=2.4.0-alpha
Dec 29 16:01:50 DEBUG TSF:LRT:OK
Dec 29 16:01:50 DEBUG TSM:INIT
Dec 29 16:01:50 DEBUG TSF:WUR:MS=0
Dec 29 16:01:50 DEBUG TSM:INIT:TSP OK
Dec 29 16:01:50 DEBUG TSM:INIT:GW MODE
Dec 29 16:01:50 DEBUG TSM:READY:ID=0,PAR=0,DIS=0
Dec 29 16:01:50 DEBUG MCO:REG:NOT NEEDED
Dec 29 16:01:50 DEBUG MCO:BGN:STP
Dec 29 16:01:50 DEBUG MCO:BGN:INIT OK,TSP=1
Dec 29 16:01:50 DEBUG TSM:READY:NWD REQ
Dec 29 16:01:50 DEBUG ?TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK:
Dec 29 16:01:50 DEBUG TSF:MSG:READ,4-4-0,s=255,c=3,t=21,pt=1,l=1,sg=0:0
Dec 29 16:01:50 DEBUG TSF:MSG:READ,0-4-255,s=255,c=3,t=20,pt=0,l=0,sg=0:
Dec 29 16:01:50 DEBUG TSF:MSG:BC
Dec 29 16:01:52 DEBUG TSF:MSG:READ,4-4-0,s=1,c=1,t=2,pt=2,l=2,sg=0:0
Dec 29 16:01:52 DEBUG TSF:MSG:READ,4-4-0,s=2,c=1,t=2,pt=2,l=2,sg=0:0
Dec 29 16:01:52 DEBUG TSF:MSG:READ,4-4-0,s=3,c=1,t=2,pt=2,l=2,sg=0:1
Dec 29 16:01:52 DEBUG TSF:MSG:READ,4-4-0,s=4,c=1,t=2,pt=2,l=2,sg=0:1
^CDec 29 16:02:35 NOTICE Received SIGINT
-
Be advised that there seems to be an issue with rfm69HW on the raspberry pi:
When using the radio directly on the pi (not as a serial gateway) the range drops significantly:
https://github.com/mysensors/MySensors/issues/1367
Apparently this wasn't an issue with mysensors 2.2, so using that is an option if you can compile it for you raspberry pi.
-
I'm getting a bad file descriptor error, any advice? Seems only 1 instance to be running.
pi@raspberrypi:~ $ sudo mysgw Mar 19 20:14:04 INFO Starting gateway... Mar 19 20:14:04 INFO Protocol version - 2.3.2 Mar 19 20:14:04 DEBUG MCO:BGN:INIT GW,CP=RNNGL---,FQ=NA,REL=255,VER=2.3.2 Mar 19 20:14:04 DEBUG TSF:LRT:OK Mar 19 20:14:04 DEBUG TSM:INIT Mar 19 20:14:04 DEBUG TSF:WUR:MS=0 Mar 19 20:14:04 DEBUG TSM:INIT:TSP OK Mar 19 20:14:04 DEBUG TSM:INIT:GW MODE Mar 19 20:14:04 DEBUG TSM:READY:ID=0,PAR=0,DIS=0 Mar 19 20:14:04 DEBUG MCO:REG:NOT NEEDED Mar 19 20:14:04 ERROR bind: Address already in use Mar 19 20:14:04 ERROR Failed to bind! Mar 19 20:14:04 DEBUG MCO:BGN:STP Mar 19 20:14:04 DEBUG MCO:BGN:INIT OK,TSP=1 Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 DEBUG TSM:READY:NWD REQ Mar 19 20:14:04 DEBUG ?TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK: Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor Mar 19 20:14:04 ERROR accept: Bad file descriptor
-
@Sebex don't run multiple instances that try to listen to the same tcp port.
-
@mfalkvidd thanks, I was wrongly under the impression that sudo mysgw would show the logs but it creates a second instance. Thanks for helping
 !
!
-
I have an Arduino Mesh network (see https://tmrh20.github.io/RF24Mesh/) (master and 4 nodes)
networkChannel 120, networkDataRate RF24_1MBPS, nodes 0-4Now I want to have my master be an RPi because it can talk to the real world.
It looks like I have the RPi wired up and software loaded (per https://www.mysensors.org/build/raspberry). Now I need to know how to talk to my Arduino's.
Now how do I talk to my Arduino's?
o- general description of what you are trying to do
Raspberry Pi controller with serial gateway with nrf24l01+ to connect to Arduino's
o- the exact configure command you used
git clone https://github.com/mysensors/MySensors.git --branch master
cd MySensors
./configure --my-transport=rf24 --my-gateway=serial --my-serial-is-pty --my-serial-port=/dev/ttyMySensorsGateway
make
sudo ./bin/mysgw
[reboot RPi]
cd MySensors
sudo make install
sudo systemctl enable mysgw.service
sudo systemctl start mysgw.service
ls -als /dev/ttyMySensorsGateway [yeilds: 0 lrwxrwxrwx 1 root root 10 Apr 9 19:22 /dev/ttyMySensorsGateway -> /dev/pts/1]o- the output from the test
Apr 09 18:47:32 INFO Config file /etc/mysensors.conf does not exist, creating new file.
Apr 09 18:47:32 INFO Starting gateway...
Apr 09 18:47:32 INFO Protocol version - 2.3.2
Apr 09 18:47:32 DEBUG Serial port /dev/ttyMySensorsGateway (115200 baud) created
Apr 09 18:47:32 INFO EEPROM file /etc/mysensors.eeprom does not exist, creating new file.
Apr 09 18:47:32 DEBUG MCO:BGN:INIT GW,CP=RNNGL---,FQ=NA,REL=255,VER=2.3.2
Apr 09 18:47:32 DEBUG TSF:LRT:OK
Apr 09 18:47:32 DEBUG TSM:INIT
Apr 09 18:47:32 DEBUG TSF:WUR:MS=0
Apr 09 18:47:32 DEBUG TSM:INIT:TSP OK
Apr 09 18:47:32 DEBUG TSM:INIT:GW MODE
Apr 09 18:47:32 DEBUG TSM:READY:ID=0,PAR=0,DIS=0
Apr 09 18:47:32 DEBUG MCO:REG:NOT NEEDED
Apr 09 18:47:32 DEBUG MCO:BGN:STP
Apr 09 18:47:32 DEBUG MCO:BGN:INIT OK,TSP=1
Apr 09 18:47:32 DEBUG TSM:READY:NWD REQ
Apr 09 18:47:32 DEBUG ?TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK:
[did not return to command prompt]
o- the settings you used in your controller
n/a
-
@OldSurferDude if you want your nodes to use MySensors, you'll need to upload MySensors sketches to them.
-
hi i am trying to install an MQTT type gateway on a raspberry pi 3,
I configured it as in the example:./configure --my-gateway = mqtt --my-controller-ip-address = 127.0.0.1 --my-mqtt-publish-topic-prefix = mysensors-out --my-mqtt-subscribe-topic-prefix = mysensors-in --my-mqtt-client-id = mygateway1
Then I do make and it does not generate errors.
and when i run
sudo mysgw
returns the following result, I do not understand what it can be or what it means.
Apr 10 15:12:21 DEBUG connected to 127.0.0.1
Apr 10 15:12:22 DEBUG! GWT: RMQ: FAIL
Apr 10 15:12:22 DEBUG GWT: RMQ: CONNECTING ...
Apr 10 15:12:22 DEBUG connected to 127.0.0.1
Apr 10 15:12:23 DEBUG! GWT: RMQ: FAIL
Apr 10 15:12:23 DEBUG GWT: RMQ: CONNECTING ...
Apr 10 15:12:23 DEBUG connected to 127.0.0.1I appreciate your time to explain this to me please, I am just starting to use Mysensors and it is incredible everything that can be generated.
Also I want to connect it to Mycontrroller.org to manage my devices from my sensor network with only 1 Gateway, I already downloaded it in my RPI3 and it runs fine, but when I connect or create the mqtt type gateway, it asks me for the broker host and I do not know what to put there, I thought of 127.0.0.1, but after that it tells me that the State is down and an error message with the IP of 127.0.0.1 and I do not know then that I need this. Thanks again for your time to explain this to you.
-
You're not being able to connect to your MQTT broker (Mosquitto or Moqutte as was in mycontroller.org). I havent used mycontroller so I cant help with that.
I use Mosquitto on the same Rpi (so just install mosquitto and mosquitto-clients). You should secure it but test first without credentials to get going. Remember to create credentials in mosquitto AND reconfig your gw
-
@MasMat I already managed to configure my gateway it already works with Mycontroller.org, I like the interface of this, but I was thinking if the nodes of my network, which are esp8266 can be configured an operating system like FreeRTOS, TinyOS or ApacHE MyNewt can be configured in my osp and handle all Mysensors processes?
There is a possibility or it is impossible
-
@Nicolás-Potier that's way way over my understanding and fluency with Mysensors. And way off topic, I think.
-
Hi all,
I want to launch gateway on RaspberryPi with a RS485 network.
I downloaded the software (MySensors Library v2.4.0-alpha).
And i made coniguration:
./configure --my-transport=rs485 --my-rs485-serial-port=/dev/ttyUSB0 --my-rs485-baudrate=9600 --my-gateway=serial --my-serial-is-pty --my-serial-port=/dev/ttyUSB20 -my-serial-baudrate=115200 -my-serial-groupname=ttyI have USB-RS485 (it uses FT232RL) converter connected to the /dev/ttyUSB0.
On the other side i have Arduino uno with UART-RS485 (MAX485) converter, and a MotionSensorRS485 example on it.After i made the program (make), and type sudo ./bin/mysgw, i've got this:
I'm able to add the hardware in domoticz (serial gateway ttyYSB20, 115200), but it doesn't see nodes.

Please help.
-
@rafal9318 please don't post the same question in multiple threads. Posting in multiple threads means the discussion is split. Important information might be available in one thread, but not the other, which means people have to ask you for that information multiple times. It is a waste of the community members' (including you) time.
If anyone can help @rafal9318 please respond in https://forum.mysensors.org/topic/11128/raspberrypi-4-as-a-gateway-controller
-
@mfalkvidd Okey, sorry.
-
I’m sorry if this is a newbie question. I have managed to create a controller using MyController on a Raspberry Pi. I have connected a NRF24l01 and created a gateway, and my controller picks up that I have a gateway present, so I assume my wiring is correct.
I have started to wire up the status LEDs, and this is where I am confused. I am used to using LEDs on PI, but connecting between he GPIO pin and ground, where the GPIO provides the voltage. The diagram above suggests that they should be permanently connected to the voltage and the GPIO provides the ground connection. Is this correct? And if it is, is it possible to test the LEDs? Thanks in advance.
-
@ej3-martin My LEDs come on when the Rpi boots (is that what you mean by testing?). Also you can invert the LEDs (on but blink off) if you want. I figured the wiring makes for better power delivery rather than feeding voltage from the GPIO
-
@MasMat I was purely wanting to find a way of testing them, to check my wiring, if they do come on during boot then this is a great way to test. It would also possibly be useful (for those of us less experienced) to have a script to run to check the wiring is correct. I think it much more useful to have them off, and blink on, and it was the wiring that confused me. I will have to see if I can investigate this further.
-
Since the pins are configurable before compilation, creating a script that uses the same settings as the compiled code would be pretty hard.
The easiest way with existing code is probably to add --my-leds-blinking-inverse to your configure command and start the gateway, as suggested by @MasMat
-
Just trying to figure out whether there is a switch or config file option for the channel, or whether the only option to change the channel is truly to recompile?!...
Just ran the Poor Man's scanner and channels 1-98 a a garbage mess, so I need to go >> 100, but am surprised the only option there seems to be a recompile?...
-
@Fear-na-Boinne yes that is correct
-
Sorry for the lack of response, life's been crazy... Thanks for the reply, I have since recompiled, but need to make some add'l changes to the sensor sketches, so I want to do all of that at once before I deploy to the new channel...
-
@Fear-na-Boinne if you want to be able to switch your rpi gateway between the old and the new channel while testing, you could try my patch which allows configurable service name
https://github.com/mysensors/MySensors/pull/1421
Or just skip running make install so you don’t overwrite the old gateway
-
@mfalkvidd Just a quick update...
Been extremely busy, so not a lot of time, but when I run the recompiled version (channel 109) gateway and use the existing - known good - sensor sketches with the channel 109 macro declaration included, it doesn't connect at all.
When I run the "old" version of the gateway and the same sensor sketches with channel 109 commented out, it just-works ...
...More testing and such due I guess!

-
Is it possible to have the RPi4B, that is being used as the Webthings Gateway, also be the My Sensor controller once I add a NRF24L01+ module and follow steps above?
-
To clarify, I have the Mozilla Webthings Controller and I want to know if I can use the instructions above to make the same RPi4B to be the MySensors gateway. Any help would be greatly appreciated.
-
In case someone has similar issue:
Running everything latest up to date.Raspberry pi zero w with nrf24 connected directly on GPIO and domoticz. Had to have startup delay on mysgw service since domoticz wouldn't or couldn't start automatically on boot.
So i added to:
sudo nano /etc/systemd/system/mysgw.service[Service]
ExecStartPre=/bin/sleep 10Maybe 10 seconds is overkill, but at least it works now.
With raspberry pi 3b+ there wasn't that issue.Also in domoticz had to use raspi ip address, when setting up mysensors LAN gateway address, instead of localhost 127.0.0.1
And myscontroller OTA updates are working too.