Mysensors Gateway on OrangePi (Zero) (opi)
-
@jirm said:
Hi again to all OPI users.
I like see that are great movements here.
I think main goal here is achieve that OPI board can run mysensors for herself connected radio boards.
Of course that can work OPI (or any board) if we attach over some port the radio board, because use of any "conventional" port (means usb, serial, eth) is the same for any hardware from the software view.Said this, I would simplificate (and reduce all hardware to minimum) all things I can and with a powerful board I can concentrate much of the roles needed.
Attach directly (means through GPIO) all hardware the board can manage without issues is my goal, and I think other much people.I think the error posted @hausinger for run mysgw seems derived from de main problem we see when try compile mysensors on OPI, and is that the need (maybe although not always necessary) that SPIDEV driver are up and working properly and mysensors software can not detect SPI bus (then fail SPIDEV) on OPI while is not being adapted all software stuff from some mysensor coder.
I hope some mysensors coder hear our call and soon can help here.
Regards
In my case, why should it be necessary to have a working spi bus? I wanted to connect a working arduino with the mysensors gw scetch on it throug USB to the OPI and use this as a ethernet gateway.
My last goal is to use a USB to RS485 converter on my OPI (works as a Gateway) without a connected arduino, because my whole mysensors communication should be over RS485.
-
Of course you dont need any SPI bus.
And so sorry but before I checked so badly the error you posted.Not seems any related working error for mysgw. I think you have mysgw working fine, seems only they can not connect/work with sensor node.
You seems only need check node communication and adjust node configuration to have your mysgw working.
I don't see you found so much trouble to make working from usb-rs485 adapter if you can do it with usb/serial node, it's only matter that the driver of adapter can work with mysgw without so much issues.
Regards
-
@jirm said:
Of course you dont need any SPI bus.
And so sorry but before I checked so badly the error you posted.Not seems any related working error for mysgw. I think you have mysgw working fine, seems only they can not connect/work with sensor node.
You seems only need check node communication and adjust node configuration to have your mysgw working.
I don't see you found so much trouble to make working from usb-rs485 adapter if you can do it with usb/serial node, it's only matter that the driver of adapter can work with mysgw without so much issues.
Regards
Thank you for your fast answer.
I try to answer it as best as I can.I tried it once again:
connected the arduino to the USB port on my OPI
DMESG says it is port ttyUSB0If i start the Gateway with:
sudo ./bin/mysgw -dI got the same result as posted before. My CPU Usage is at 100% on one core.
if I kill the process of mysgw and start openhab2 (my used controller) it can connect direct to the Arduino (connected as USB as before) and it worked fine.
So my configuration of my nodes (currently only 1 for testing) is working fine through rs485.
Summary:
Connection node -> Arduino Gateway = OK
Connetion from openhab2 to Arduino Gateway = OK (openhab2 on same OPI as Arduino)
OPI as a Ethernet - Serial Gateway = NOT OK, Problem is shown on my screenshot.USB-RS485:
I also tried this, but after my configuration:
./configure --my-gateway=ethernet --my-port=5003 --my-transport=rs485 --my-rs485-serial-port=/dev/ttyUSB0 --my-rs485-baudrate=57600
I can do the "make" command.
After that I start it with:
sudo ./bin/mysgw -d
I only get this:

I can now type a new command in the console (Gateway quit itself)
-
Hi All,
Collected some info on the OPI zero CPU:root@orangepizero:/proc# more cpuinfo
Processor : ARMv7 Processor rev 5 (v7l)
processor : 0
BogoMIPS : 2400.00processor : 1
BogoMIPS : 2400.00processor : 2
BogoMIPS : 2400.00processor : 3
BogoMIPS : 2400.00Features : swp half thumb fastmult vfp edsp thumbee neon vfpv3 tls vfpv4 idiva idivt
CPU implementer : 0x41
CPU architecture: 7
CPU variant : 0x0
CPU part : 0xc07
CPU revision : 5Hardware : sun8i
Revision : 0000
Serial : 2467783d034e20000098
root@orangepizero:/proc#Dmesg Output:
[ 0.000000] Initializing cgroup subsys cpu
[ 0.000000] Linux version 3.4.113-sun8i (root@xenial) (gcc version 5.4.0 20160609 (Ubuntu/Linaro 5.4.0-6ubuntu1~16.04.1) ) #50 SMP PREEMPT Mon Nov
14 08:41:55 CET 2016
[ 0.000000] CPU: ARMv7 Processor [410fc075] revision 5 (ARMv7), cr=10c5387d
[ 0.000000] CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache
[ 0.000000] Machine: sun8iIt should be a H2+, but I have seen H3 (think that was with an FTDI interface on the debug port....
-
@hausinger That shouldn't happen (gateway quitting itself). Could you submit the debug log with MY_DEBUG_VERBOSE_RF24 enabled?
-
@marceloaqno said:
@hausinger That shouldn't happen (gateway quitting itself). Could you submit the debug log with MY_DEBUG_VERBOSE_RF24 enabled?
Yes i can check that, but how?
I tried it to enable it in "example_linux" => mysgw.cpp (added the line "#define MY_DEBUG_VERBOSE_RF24")
I also tried it in the file: "MyConfig.h" (also added the line "#define MY_DEBUG_VERBOSE_RF24")But my output is still the same in the console.
-
@Tag Just to make it clear, do you want to connect the RF24 radio directly on the OPi's GPIO pins? Or do you want to connect it first to an Arduino and then to the OPi?
I haven't used the mysgw because so far I only played with EasyIoT (directly attached RF24 to RPi GPIO - doesn't work on OPi) and MyController (using an Arduino connected to the OPi's serial port).
Since MySensors is open source you can definitely change the pin numbers to match the OPI's Sunxi pin numbering. I don't have a setup in place right now to point you in the exact direction but will cook one tomorrow and get back with the details.
Meanwhile you can burn the GatewaySerial sketch on your Arduino and either use /bin/mysgw or:apt-get -y update apt-get -y install minicom minicom -D /dev/ttyUSB0It's likely that the minicom will scramble the text on your screen but you can:
Ctrl+Z O Screen and Keyboard T Esc Save setup as df1Close the minicom window then open it again and all should be fine.
-
Hi!, my idea is to have the NRF24 radio directly attached to the GPIO header on the OPI, (got this already working on my RPI system). So the idea is to run mysgw on the OPI system.
(already got an extensive sensor network running with multiple arduinos and Mycontroller on thae RPI) On the RPI i had the arduino GW attached to USB and the NRF24 directly attached at the GPIO header at the same time, MyController saw 2 gateways") )
)The other option like you already mentioned is to attach the arduino using USB read from /dev/ttyUSB0. I see this as a last resort only if mysgw will never run on the OPI zero.
I read on the OPI website that the 26 pin header from the OPI is directly compatible with the RPI, however other sources of information tell me differently. So if you want to help out with the pin numbering this is greatly appreciated!
but again mysgw on the OPI with the radio on the GPIO header would be great!!
At this moment we try to build/compile mysgw on the OPI board, however that fails at the SPI part.
Thanks!
-
@hausinger The problem you are having with your serial gateway (./configure --my-gateway=serial --my-serial-port=/dev/ttyUSB0 --my-serial-baudrate=115200) may be related to this bug:
https://github.com/mysensors/MySensors/issues/720#issuecomment-270712256
-
@Tag I made the test setup and retraced my steps from the previous experiment. While the TMRh20 is working, the problem indeed lies with the ** mysgw** compilation. I'm getting the same error.
After spending quite some time trying to mitigate the errors I hit a wall and I concluded that the problem is not the different pin numbering but the mysgw source code. I believe the problem is the lack of support for this architecture and with MySensors being so complex and my C++ skills so average, I'm afraid I can't help.
However, if someone can mitigate the source code to successfully compile, the radio should be initialized with:
RF24 radio(7, 0);
7 - CE pin
0 - CS pin
More details here: https://github.com/TMRh20/RF24/issues/257
-
@mihai.aldea said:
us experiment. While the TMRh20 is working, the problem indeed lies with the ** mysgw** compilation. I'm getting the same error.
Thanks for the confirmation!!, now lets hope that mysgw, will be fixed/ported to the OPI boards soon!
would be great to expand the number of systems it will run on..
-
@Tag
Could you setup my sensors gateway on orange pi one? if you can please help me to build this . thank you
-
Unfortunately the mysgw software does not run native on the OPI systems at this moment.The only option today is to add an arduino to the USB port running i.e the serial gateway sketch (if you do not want to use the USB port, an other option would be using an UART trough the GPIO header, you data will show up on i.e. /dev/ttyS1 if UART 1 is used)
step 2 will be to install controller software.
(i tested MyController on the OPI and that works like a charm, and looks pretty cool!)See this link on how to build a serial gateway on the arduino. Using this setup you can follow the RaspberryPI tutorials.
Hopefully mysgw will run soon on the OrangePI systems! think this is work in progress......
-
I'm trying to add support for Orange Pi to MySensors, this is the work-in-progress repository:
https://github.com/marceloaqno/MySensors/tree/spidevIt would be great if someone could test and submit results from the configure and make commands:
git clone https://github.com/marceloaqno/MySensors marceloaqno-spidev cd marceloaqno-spidev git checkout spidev ./configure make
-
Hi!, really appreciate your hard work on this!!, below are the results,
(I was not able to execute the 1st command but... tried something else..
but... tried something else..root@orangepizero:~# git clone https://github.com/marceloaqno/MySensors.git marceloaqno-spidev
Cloning into 'marceloaqno-spidev'...
remote: Counting objects: 13834, done.
remote: Compressing objects: 100% (26/26), done.
remote: Total 13834 (delta 2), reused 0 (delta 0), pack-reused 13808
Receiving objects: 100% (13834/13834), 9.67 MiB | 3.16 MiB/s, done.
Resolving deltas: 100% (8289/8289), done.
Checking connectivity... done.
root@orangepizero:~# cd marceloaqno-spidev
root@orangepizero:~/marceloaqno-spidev# git checkout spidev
Branch spidev set up to track remote branch spidev from origin.
Switched to a new branch 'spidev'root@orangepizero:~/marceloaqno-spidev# ./configure
[SECTION] Detecting target machine.
[OK] machine detected: SoC=H3, Type=unknown, CPU=armv7l.
[SECTION] Detecting SPI driver.
[OK] SPI driver detected:SPIDEV.
[SECTION] Detecting init system.
[OK] init system detected: systemd.
[SECTION] Saving configuration.
[SECTION] Cleaning previous builds.
[OK] Finished.
root@orangepizero:~/marceloaqno-spidev# make
gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/log.c -o build/drivers/Linux/log.o
g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o
g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o
g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o
g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o
g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o
g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o
g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o
g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o
g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o
g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o
g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o
g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o
/tmp/ccVhf8xP.s: Assembler messages:
/tmp/ccVhf8xP.s:14808: Warning: IT blocks containing 32-bit Thumb instructions are deprecated in ARMv8
g++ -MT build/drivers/SPIDEV/SPI.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_GPIO_CAPABLE -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/SPIDEV/SPI.cpp -o build/drivers/SPIDEV/SPI.o
g++ -pthread -o bin/mysgw build/drivers/Linux/log.o build/drivers/Linux/noniso.o build/drivers/Linux/GPIO.o build/drivers/Linux/Print.o build/drivers/Linux/EthernetClient.o build/drivers/Linux/SerialPort.o build/drivers/Linux/Stream.o build/drivers/Linux/IPAddress.o build/drivers/Linux/compatibility.o build/drivers/Linux/interrupt.o build/drivers/Linux/SoftEeprom.o build/drivers/Linux/EthernetServer.o build/examples_linux/mysgw.o build/drivers/SPIDEV/SPI.oroot@orangepizero:~/marceloaqno-spidev# ll bin
total 640
-rwxr-xr-x 1 root root 654544 Jan 7 22:48 mysgwSeems we have a binary!!

-
Just hooked up a radio to the GPIO header. (used this link for the model 1 RPI https://www.mysensors.org/build/raspberry and attached the interrupt pin also to pin 15)
This is the result i get
root@orangepizero:~/marceloaqno-spidev/bin# mysgw
mysgw: Starting gateway...
mysgw: Protocol version - 2.2.0-beta
mysgw: Could not open /sys/class/gpio/gpio10/direction
Illegal instruction
root@orangepizero:~/marceloaqno-spidev/bin#
-
@Tag Great! The mapping of the physical GPIO number in OrangePi is not ready yet, so you need to figure out the correct value for the CE and CSN pins by adding this to the examples_linux/mysgw.cpp or MyConfig.h
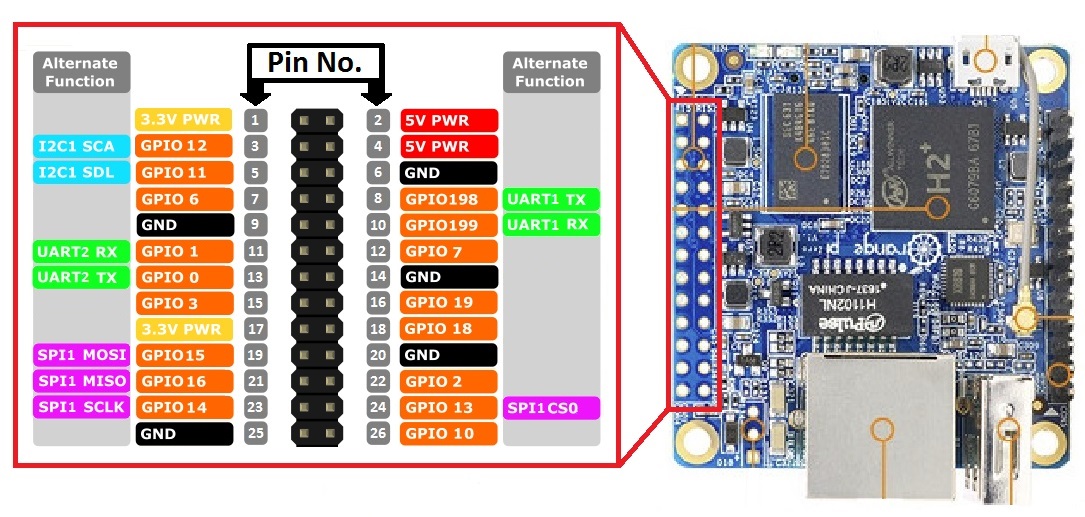
#define MY_RF24_CE_PIN X #define MY_RF24_CS_PIN YThis is the best pinout image I've found that could help:
https://oshlab.com/orange-pi-zero-pinout/This may also give you some hint:
cat /sys/kernel/debug/gpio
-
@Tag Maybe this one can help too:
http://orange314.com/WiringOP
-
@Tag also, please don't set the interrupt pin for now.
-
@Tag I found more information on the wiki page about the gpio pins:
http://linux-sunxi.org/GPIOIt seems that there is a calculation to be made to know which number to use

-
Hi!!, many thanks for the info!! really helpful!
Made some progress. first I created this table based on this page: http://linux-sunxi.org/GPIOPin - Num - Name - Calculated value A=1 ((1-1)*32 + Pin)
CE / 22 / PA02 / 2
SCK / 23 / PA14 / 14
MISO / 21 / PA16 / 16
CSN / 24 / PA13 / 13
MOSI / 19 / PA15 / 15Now it is important that you know which kernel is used on your systems the 4.x architecture is different compared to the 3.x arch...
If the 4.x kernel is used you need to use the calculated value for the GPIO pin numbering, i could not test that since I am using the 3.x kernel, so this is what i did:
- load the GPIO kernel module:
modprobe gpio-sunxi- Create the GPIO device files since these were not available on my system by default.
for A in 1 2 3 4 5 6 7 8 9 10 11 12; do echo "$A" > /sys/class/gpio/export ; doneThis created the following entries in /sys/class/gpio
root@orangepizero:~/marceloaqno-spidev/bin# ls -l /sys/class/gpio total 0 --w------- 1 root root 4096 Jan 8 07:39 export lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio1 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio1 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio11 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio11 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio12 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio12 lrwxrwxrwx 1 root root 0 Jan 8 07:32 gpio13 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio13 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio2 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio2 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio3 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio3 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio4 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio4 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio5 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio5 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio6 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio6 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio7 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio7 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio8 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio8 lrwxrwxrwx 1 root root 0 Jan 8 07:16 gpio9 -> ../../devices/platform/sunxi-pinctrl/gpio/gpio9 lrwxrwxrwx 1 root root 0 Jan 1 1970 gpiochip0 -> ../../devices/platform/sunxi-pinctrl/gpio/gpiochip0 --w------- 1 root root 4096 Jan 1 1970 unexportModified mysgw.cpp to use:
#define MY_RF24_CE_PIN 2 #define MY_RF24_CS_PIN 13And did a clean build:
make clean ./configure makeNow some thing has changed!
root@orangepizero:~/marceloaqno-spidev/bin# ./mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=1 mysgw: TSM:FAIL:PDTWill do some more testing with an LED today see if the GPIO pin numbering that was created is okay,
will keep you posted!:
-
@marceloaqno
Did some testing,Setup the GPIO pins:
modprobe gpio-sunxi for A in 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 do echo "$A" > /sys/class/gpio/export done(The device files that are created by the commands above do not survive a reboot, so remember to execute the above commands after each reboot!)
Hooked up an led between ground and i.e. pin 22, this pin is linked to GPIO2
Then:
echo out > /sys/class/gpio/gpio2/direction echo 1 > /sys/class/gpio/gpio2/value echo 0 > /sys/class/gpio/gpio2/valueAnd eureka!! Led went on and off
Did this for all GPIO ports used by mysgw, below is the verified pin / GPIO table
Pin# - GPIO / NRF24 22 - GPIO2 / CE 23 - GPIO14 / SCK 21 - GPIO16 / MISO 24 - GPIO13 / CSN 19 - GPIO15 / MOSITested all pins and led went on and off on all
How i connected the radio: https://www.mysensors.org/build/raspberry (see the Pi1 part)
How to setup GPIO: http://linux-sunxi.org/GPIO (3.x kernel part, and added pin 13/14/15/16)
Pinout for the OPI Zero: https://i1.wp.com/oshlab.com/wp-content/uploads/2016/11/Orange-Pi-Zero-Pinout-banner2.jpg?fit=1200%2C628&ssl=1 (carefully look at the pin numbering!)Maybe it is usefull, I rebuild mysgw with NRF24 radio debugging enabled, this is the output I get:
root@orangepizero:~/marceloaqno-spidev/bin# ./mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: RF24:write register, reg=0, value=14 mysgw: RF24:write register, reg=3, value=3 mysgw: RF24:write register, reg=4, value=95 mysgw: RF24:write register, reg=5, value=76 mysgw: RF24:write register, reg=6, value=39 mysgw: RF24:write register, reg=16, value=115 mysgw: RF24:write register, reg=29, value=6 mysgw: RF24:read register, reg=6, value=0 mysgw: RF24:read register, reg=5, value=0 mysgw: !RF24:INIT:SANCHK FAIL mysgw: !TSM:INIT:TSP FAIL mysgw: TSM:FAIL:CNT=1 mysgw: TSM:FAIL:PDT mysgw: RF24:write register, reg=0, value=12 mysgw: RF24:PD ^Cmysgw: Received SIGINTkeeps looping, until ctrl-c is given.
-
@Tag said:
Made some progress. first I created this table based on this page: http://linux-sunxi.org/GPIO
Pin - Num - Name - Calculated value
CE / 22 / PA02 / 482
SCK / 23 / PA14 / 494
MISO / 21 / PA16 / 496
CSN / 24 / PA13 / 493
MOSI / 19 / PA15 / 495Are you sure this is correct?
The formula is: (position of letter in alphabet - 1) * 32 + pin number
For PA02 for instance the correct value is:
PA02 = (1 - 1) * 32 + 02 = 2Actually you don't need to use the formula at all with the PA ports, all you have to do is use the trailing number.
-
You are right, took the letter P, which is 16.... but is should have been A.... (for the 4.x kernel)
Updated the table!,Thx!!
-
i have problem in build gateway on orangepi one
root@OrangePI:~/marceloaqno-spidev# make Makefile:16: Makefile.inc: No such file or directory [Running configure] [SECTION] Detecting target machine. [OK] machine detected: SoC=H3, Type=unknown, CPU=armv7l. [SECTION] Detecting SPI driver. [OK] SPI driver detected:SPIDEV. [SECTION] Detecting init system. [OK] init system detected: systemd. [SECTION] Saving configuration. [OK] Finished. gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o drivers/Linux/interrupt.cpp: In function ‘void* interruptHandler(void*)’: drivers/Linux/interrupt.cpp:107:26: warning: ignoring return value of ‘ssize_t read(int, void*, size_t)’, declared with attribute warn_unused_result [-Wunused-result] (void)read (fd, &c, 1) ; ^ g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o In file included from ./MySensors.h:294:0, from examples_linux/mysgw.cpp:74: ./drivers/RF24/RF24.cpp:39:11: error: Not supported on this platform. hwDigitalWrite(MY_RF24_CS_PIN, level); ^ ./drivers/RF24/RF24.cpp:44:11: error: Not supported on this platform. hwDigitalWrite(MY_RF24_CE_PIN, level); ^ ./drivers/RF24/RF24.cpp:388:11: error: Not supported on this platform. hwPinMode(MY_RF24_CE_PIN,OUTPUT); ^ ./drivers/RF24/RF24.cpp:389:11: error: Not supported on this platform. hwPinMode(MY_RF24_CS_PIN,OUTPUT); ^ ./drivers/RF24/RF24.cpp:37:32: warning: unused parameter ‘level’ [-Wunused-parameter] LOCAL void RF24_csn(const bool level) ^ ./drivers/RF24/RF24.cpp:42:31: warning: unused parameter ‘level’ [-Wunused-parameter] LOCAL void RF24_ce(const bool level) ^ ./drivers/RF24/RF24.cpp: In function ‘uint8_t RF24_spiMultiByteTransfer(uint8_t, uint8_t*, uint8_t, bool)’: ./drivers/RF24/RF24.cpp:56:11: error: ‘LOW’ was not declared in this scope RF24_csn(LOW); ^ ./drivers/RF24/RF24.cpp:99:11: error: ‘HIGH’ was not declared in this scope RF24_csn(HIGH); ^ ./drivers/RF24/RF24.cpp: In function ‘void RF24_startListening()’: ./drivers/RF24/RF24.cpp:235:10: error: ‘HIGH’ was not declared in this scope RF24_ce(HIGH); ^ ./drivers/RF24/RF24.cpp: In function ‘void RF24_stopListening()’: ./drivers/RF24/RF24.cpp:241:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp: In function ‘void RF24_powerDown()’: ./drivers/RF24/RF24.cpp:251:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp: In function ‘bool RF24_sendMessage(uint8_t, const void*, uint8_t)’: ./drivers/RF24/RF24.cpp:269:10: error: ‘HIGH’ was not declared in this scope RF24_ce(HIGH); ^ ./drivers/RF24/RF24.cpp:276:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp: In function ‘bool RF24_initialize()’: ./drivers/RF24/RF24.cpp:395:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp:396:11: error: ‘HIGH’ was not declared in this scope RF24_csn(HIGH); ^ Makefile:114: recipe for target 'build/examples_linux/mysgw.o' failed make: *** [build/examples_linux/mysgw.o] Error 1 root@OrangePI:~/marceloaqno-spidev#i want build a gateway with orangepi one with channel 0 . what am i do ? thank you
-
-
@Tag Does the TMRh20 works in the way your radio is currently connected?
-
@marceloaqno
The library compiled, but unfortunately i cannot get the examples for linux working.
need to edit i.e. gettingstarted.cpp with the correct pin setting, have tried a lot, but either it says that the radio is not connected, and if used with incorrect settings it will not compile at all....Maybe someone following this thread who has experince with this lib?
if there is any progress from my side will keep you posted...
-
If you used this wiring scheme:
nRF24L01 | Orange Pi _________|________________ VCC | VCC3V3-EXT GND | GND CSN | SPI0_CS0 (SPI-CE0) CE | PA7 (IO-7) MOSI | SPI0_MOSI (SPI-MOSI) SCK | SPI0_CLK (SPI-CLK) MISO | SPI0_MISO (SPI-MISO)Then you should initialize the radio with:
RF24 radio(7,0);Worked for me:
root@opi-pc-1:~/RF24-master/examples_linux# ./gettingstarted RF24/examples/GettingStarted/ STATUS = 0x0e RX_DR=0 TX_DS=0 MAX_RT=0 RX_P_NO=7 TX_FULL=0 RX_ADDR_P0-1 = 0x65646f4e32 0x65646f4e31 RX_ADDR_P2-5 = 0xc3 0xc4 0xc5 0xc6 TX_ADDR = 0x65646f4e32 RX_PW_P0-6 = 0x20 0x20 0x00 0x00 0x00 0x00 EN_AA = 0x3f EN_RXADDR = 0x02 RF_CH = 0x4c RF_SETUP = 0x07 CONFIG = 0x0e DYNPD/FEATURE = 0x00 0x00 Data Rate = 1MBPS Model = nRF24L01+ CRC Length = 16 bits PA Power = PA_MAX ************ Role Setup *********** Choose a role: Enter 0 for pong_back, 1 for ping_out (CTRL+C to exit)
-
@mihai.aldea Could you try the repo I'm working on (https://github.com/marceloaqno/MySensors/tree/spidev marceloaqno-spidev) adding your settings to the examples_linux/mysgw.cpp?
#define MY_RF24_CE_PIN 7 #define MY_RF24_CS_PIN 0
-
Hmmm.... checked the docs again and guess what. the 26 pin header on the OPI Zero has SPI1.... instead of SPI0
Expansion Port
The Orange Pi Zero has a 26-pin, 0.1" unpopulated connector with several low-speed interfaces. 2x13 Header 1 3.3V 2 5V 3 TWI0_SDA / PA12 4 5V 5 TWI0_SCK / PA11 6 GND 7 PWM1 / PA06 8 UART1_TX / PG06 9 GND 10 UART1_RX / PG07 11 UART2_RX / PA01 12 SIM_CLK/PA_EINT7 / PA07 13 UART2_TX / PA00 14 GND 15 UART2_CTS / PA03 16 TWI1-SDA / PA19 17 3.3V 18 TWI1-SCK / PA18 19 SPI1_MOSI / PA15 20 GND 21 SPI1_MISO / PA16 22 UART2_RTS / PA02 23 SPI1_CLK / PA14 24 SPI1_CS / PA13 25 GND 26 SIM_DET/PA_EINT10 / PA10From http://linux-sunxi.org/Xunlong_Orange_Pi_Zero
If i look at /dev I only see spi0, which is most probably used for the onboard flash...root@orangepizero:/# ll /dev | grep -i spi crw------- 1 root root 153, 0 Jan 8 11:12 spidev0.0So now i need to figure out a way to get SPI1 up and running
-
@marceloaqno Here's the output:
./MySensors.h:258:2: error: #error No support for nRF24 radio on this platform #error No support for nRF24 radio on this platform ^ In file included from ./drivers/RF24/RF24.cpp:23:0, from ./MySensors.h:294, from examples_linux/mysgw.cpp:77: ./drivers/RF24/RF24.h:52:17: fatal error: SPI.h: No such file or directory #include <SPI.h> ^ compilation terminated. Makefile:98: recipe for target 'build/examples_linux/mysgw.o' failed make: *** [build/examples_linux/mysgw.o] Error 1
-
@Tag Use this info:
http://linux-sunxi.org/Sunxi-tools
To export /boot/script.bin, edit the output file and enable SPI1, then compile it back and reboot your OPi with the SPI1 active.If you haven't done this before, it's quite simple.
apt-get install sunxi-tools cd ~ bin2fex /boot/script.bin > script.fexEdit the script.fex file, find the [spi1] section and change spi_used = 0 to spi_used = 1. Save the file and exit.
Thenfex2bin script.fex > /boot/script.binReboot, then you should have the SPI1 active.
-
@marceloaqno
i have error yet
orangepi is a good board. please work at this board and run mysensors gateway on this, i follow this topic when you can fix this on orange pi . thank you
-
Yep already found it
problem was the old version of the tools, it was not able to decompile the script.bin file...[update]
- modified the script file,
- changed spi_used = 1
- compiled back and rebooted
just 1 device file in called spidev0.0 no new device files are created.....
dmesg output:
[ 0.814287] sunxi_spi_chan_cfg()1376 - [spi-0] has no spi_regulator. [ 0.814316] sunxi_spi_chan_cfg()1376 - [spi-1] has no spi_regulator. [ 0.815569] spi spi0: master is unqueued, this is deprecated [ 0.816776] spi spi1: master is unqueued, this is deprecatedThx, will keep you posted!
-
@Reza Was /sys/class/gpio/export created after modprobe gpio-sunxi?
@mihai-aldea Could you send the complete make and configure output so I can check if your system is correctly detected?
-
@marceloaqno said:
@mihai-aldea Could you send the complete make and configure output so I can check if your system is correctly detected?
Here it is
root@opi-pc-1:~/rf24opi/MySensors# ./configure --soc=H3 [OK] init system detected: systemd [SECTION] Saving configuration. [SECTION] Cleaning previous builds. [OK] Finished. root@opi-pc-1:~/rf24opi/MySensors# make gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o In file included from examples_linux/mysgw.cpp:77:0: ./MySensors.h:258:2: error: #error No support for nRF24 radio on this platform #error No support for nRF24 radio on this platform ^ In file included from ./drivers/RF24/RF24.cpp:23:0, from ./MySensors.h:294, from examples_linux/mysgw.cpp:77: ./drivers/RF24/RF24.h:52:17: fatal error: SPI.h: No such file or directory #include <SPI.h> ^ compilation terminated. Makefile:98: recipe for target 'build/examples_linux/mysgw.o' failed make: *** [build/examples_linux/mysgw.o] Error 1
-
@mihai.aldea I think you're not in the right branch, could you start from scratch like this:
rm -rf marceloaqno-spidev git clone https://github.com/marceloaqno/MySensors marceloaqno-spidev cd marceloaqno-spidev git checkout spidev ./configure make
-
@marceloaqno
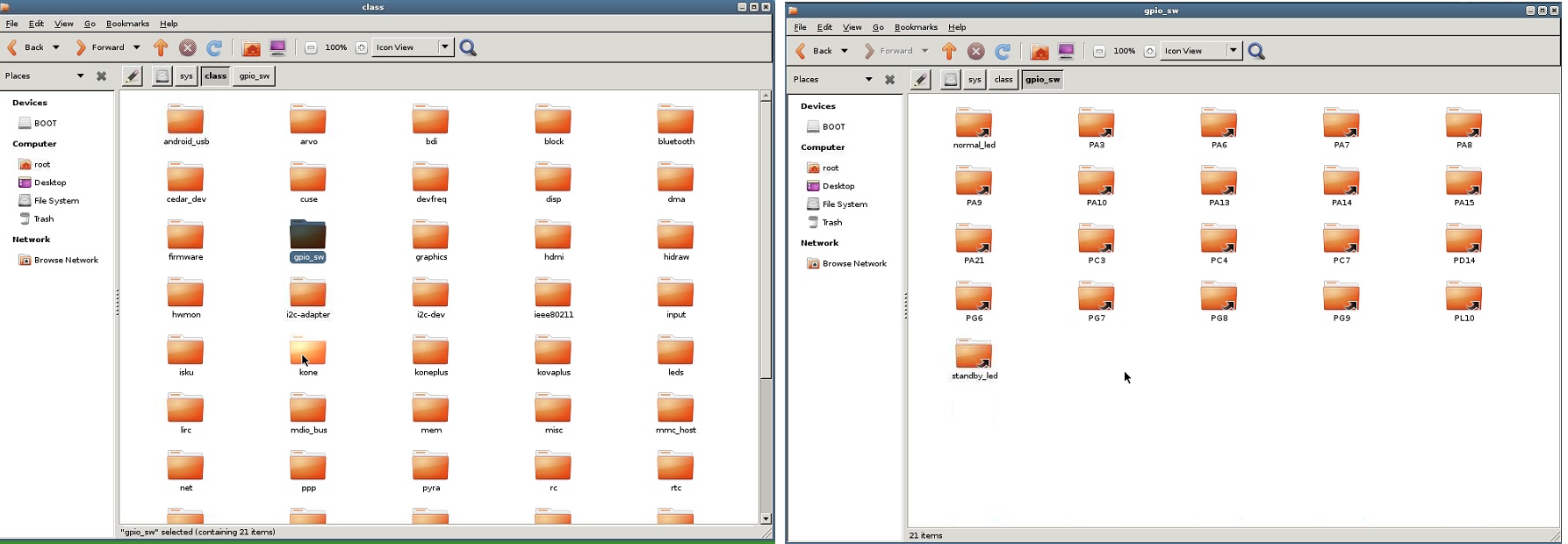
i have not any folder "gpio" in class folder .
what am i do ?
can you create a new topic with all steps after full fix on orange pi ?
thank you. i follow this topic
-
@marceloaqno You were right, I wasn't using the correct branch. Your instructions though did not work for me
root@opi-pc-1:~# git clone https://github.com/marceloaqno/MySensors/tree/spidev marceloaqno-spidev Cloning into 'marceloaqno-spidev'... fatal: repository 'https://github.com/marceloaqno/MySensors/tree/spidev/' not foundAnyway, I found another way:
git clone https://github.com/marceloaqno/MySensors.git marceloaqno-spidev cd marceloaqno-spidev/ git pull origin spidev ./configure makeThis time it compiled successfuly, but when I fired up mysgw all I got was:
mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-betawith no other output.
Just to be sure we're on the same note, what is the wiring schematic I should use? When I first started to tinker with RF24 on OPi I found at least two wiring schematics.
For reference here's the gpio readall on my OPi PC:+-----+-----+----------+------+---+-Orange Pi+---+---+------+---------+-----+--+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | | | 3.3v | | | 1 || 2 | | | 5v | | | | 12 | 8 | SDA.0 | ALT5 | 0 | 3 || 4 | | | 5V | | | | 11 | 9 | SCL.0 | ALT5 | 0 | 5 || 6 | | | 0v | | | | 6 | 7 | GPIO.7 | ALT3 | 0 | 7 || 8 | 0 | ALT4 | TxD3 | 15 | 13 | | | | 0v | | | 9 || 10 | 0 | ALT4 | RxD3 | 16 | 14 | | 1 | 0 | RxD2 | ALT5 | 0 | 11 || 12 | 0 | ALT3 | GPIO.1 | 1 | 110 | | 0 | 2 | TxD2 | ALT5 | 1 | 13 || 14 | | | 0v | | | | 3 | 3 | CTS2 | ALT5 | 0 | 15 || 16 | 0 | ALT3 | GPIO.4 | 4 | 68 | | | | 3.3v | | | 17 || 18 | 0 | ALT3 | GPIO.5 | 5 | 71 | | 64 | 12 | MOSI | ALT4 | 0 | 19 || 20 | | | 0v | | | | 65 | 13 | MISO | ALT4 | 0 | 21 || 22 | 0 | ALT5 | RTS2 | 6 | 2 | | 66 | 14 | SCLK | ALT4 | 0 | 23 || 24 | 0 | ALT4 | CE0 | 10 | 67 | | | | 0v | | | 25 || 26 | 0 | ALT3 | GPIO.11 | 11 | 21 | | 19 | 30 | SDA.1 | ALT4 | 0 | 27 || 28 | 0 | ALT4 | SCL.1 | 31 | 18 | | 7 | 21 | GPIO.21 | ALT3 | 0 | 29 || 30 | | | 0v | | | | 8 | 22 | GPIO.22 | ALT3 | 0 | 31 || 32 | 0 | ALT5 | RTS1 | 26 | 200 | | 9 | 23 | GPIO.23 | OUT | 0 | 33 || 34 | | | 0v | | | | 10 | 24 | GPIO.24 | OUT | 1 | 35 || 36 | 0 | ALT5 | CTS1 | 27 | 201 | | 20 | 25 | GPIO.25 | ALT3 | 0 | 37 || 38 | 0 | ALT5 | TxD1 | 28 | 198 | | | | 0v | | | 39 || 40 | 0 | ALT5 | RxD1 | 29 | 199 | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+-Orange Pi+---+------+----------+-----+-----+
-
Just a question the command "gpio readall" does that does show the actual status of the system, or is it just a fixed table that is printed on screen....
Look at mine:
root@orangepizero:~# gpio readall +-----+-----+----------+------+---+-Orange Pi+---+---+------+---------+-----+--+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | | | 3.3v | | | 1 || 2 | | | 5v | | | | 12 | 8 | SDA.0 | ALT5 | 0 | 3 || 4 | | | 5V | | | | 11 | 9 | SCL.0 | ALT5 | 0 | 5 || 6 | | | 0v | | | | 6 | 7 | GPIO.7 | ALT3 | 0 | 7 || 8 | 1 | OUT | TxD3 | 15 | 13 | | | | 0v | | | 9 || 10 | 0 | ALT5 | RxD3 | 16 | 14 | | 1 | 0 | RxD2 | ALT5 | 0 | 11 || 12 | 0 | ALT3 | GPIO.1 | 1 | 110 | | 0 | 2 | TxD2 | ALT5 | 0 | 13 || 14 | | | 0v | | | | 3 | 3 | CTS2 | ALT3 | 0 | 15 || 16 | 0 | ALT3 | GPIO.4 | 4 | 68 | | | | 3.3v | | | 17 || 18 | 0 | ALT3 | GPIO.5 | 5 | 71 | | 64 | 12 | MOSI | ALT4 | 0 | 19 || 20 | | | 0v | | | | 65 | 13 | MISO | ALT4 | 0 | 21 || 22 | 0 | OUT | RTS2 | 6 | 2 | | 66 | 14 | SCLK | ALT4 | 0 | 23 || 24 | 0 | ALT4 | CE0 | 10 | 67 | | | | 0v | | | 25 || 26 | 0 | ALT3 | GPIO.11 | 11 | 21 | | 19 | 30 | SDA.1 | ALT4 | 0 | 27 || 28 | 0 | ALT4 | SCL.1 | 31 | 18 | | 7 | 21 | GPIO.21 | ALT3 | 0 | 29 || 30 | | | 0v | | | | 8 | 22 | GPIO.22 | ALT3 | 0 | 31 || 32 | 0 | ALT3 | RTS1 | 26 | 200 | | 9 | 23 | GPIO.23 | OUT | 0 | 33 || 34 | | | 0v | | | | 10 | 24 | GPIO.24 | OUT | 1 | 35 || 36 | 0 | ALT3 | CTS1 | 27 | 201 | | 20 | 25 | GPIO.25 | OUT | 1 | 37 || 38 | 0 | ALT5 | TxD1 | 28 | 198 | | | | 0v | | | 39 || 40 | 0 | ALT5 | RxD1 | 29 | 199 | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+-Orange Pi+---+------+----------+-----+-----+It is the same... and shows 40 pins while the OPI Zero only has 26.......
There are some small differences between our tables in the naming column... so i guess it really reads the status / names of the pins.. Anyhow still strange that 40 pins are shown instead of 26 for the zero..
-
@marceloaqno: are you planning to create a pull request? also, like @Reza suggested i think it would be smart to gather all information somehwhere, unfortunately mysensors does not seem to have a wiki. can we write an article somehow? i could take care of that.
-
@mihai.aldea sorry about the github link mistake.
@pansen Yes, I will.
Is the orientation of the pins correct in the image?
-
Nope pinout is reversed!,
The link below shows the correct one!
https://oshlab.com/orange-pi-zero-pinout/
-
@Tag Oops, did I get it right this time (I reuploaded the image)?
-
Build the RF24 lib, without erros on the OPI Zero. and am now able to start the tools and radio seems to be recognised!. (was a faulty breadboard wire....
)Used the follwing to for the radio:
RF24 radio(2,0);Output from gettingstarted:
root@orangepizero:~/rf24libs/RF24/examples_linux# ./gettingstarted RF24/examples/GettingStarted/ STATUS = 0x00 RX_DR=0 TX_DS=0 MAX_RT=0 RX_P_NO=0 TX_FULL=0 RX_ADDR_P0-1 = 0x0000000000 0xff00000000 RX_ADDR_P2-5 = 0xff 0xff 0xff 0xff TX_ADDR = 0xffffffffff RX_PW_P0-6 = 0xff 0xff 0xff 0xff 0xff 0xff EN_AA = 0xff EN_RXADDR = 0xff RF_CH = 0xbc RF_SETUP = 0xff CONFIG = 0xff DYNPD/FEATURE = 0xff 0xff Data Rate = 1MBPS Model = nRF24L01 CRC Length = 16 bits PA Power = PA_MAX ************ Role Setup *********** Choose a role: Enter 0 for pong_back, 1 for ping_out (CTRL+C to exit) >
-
@Tag Could you fill this table with your current setup?
nRF24L01 | OrangePi | OrangePi | phyPin | GPIO _________|_______________________ VCC | 3V3-PWR | 3V3-PWR GND | GND | GND CSN | | CE | | MOSI | 19 | 15 SCK | 23 | 14 MISO | 21 | 16
-
Sure here it is,
nRF24L01 | OrangePi | OrangePi | phyPin | GPIO _________|_______________________ VCC | 3V3-PWR | 3V3-PWR GND | GND | GND CSN | 24 | 13 CE | 22 | 2 MOSI | 19 | 15 SCK | 23 | 14 MISO | 21 | 16Radio seems to be recognised, still need to test data transfer...
-
I created the draft for the official article: https://www.mysensors.org/build/orange
-
@marceloaqno and everyone else involved in this effort: great work! I love when people come together to solve a problem.
-
@marceloaqno
@mfalkvidd @Tag @pansen @Reza @mihai.aldea @hausingerWooow woow woow !!!
Only few days "off" and the problem to make work Mysensors on OPI are solved.
So many many thanks to all people here that have been involved to make that OPI good little boards can work with Mysensors.
This is the proof that when good people join can reach the most difficult achievements and all humanity can benefit.
Awesome work !
Regards
-
Great work!!! the GPIO part most probably needs some additions for OPI zero on the topic of the spidev1.0 driver and the GPIO pins, send it to you once i got everything documented.
Really many thanks for your hard work here!!
-
This post is deleted!
-
@marceloaqno
thank you. but i have error:root@OrangePI:~# ls /sys/class/gpio/export ls: cannot access /sys/class/gpio/export: No such file or directory root@OrangePI:~# modprobe gpio-sunxi root@OrangePI:~# ls /sys/class/gpio/export ls: cannot access /sys/class/gpio/export: No such file or directoryin class folder i dont have gpio folder (i use a orangepi one with ubuntu os )
i
-
You need to create the files after each boot.
After the modprobe, Issue this command:
sudo for A in 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16; do echo "$A" > /sys/class/gpio/export ; doneThis will get you the files.
-
root@OrangePI:~# git clone https://github.com/marceloaqno/MySensors.git orangepi Cloning into 'orangepi'... remote: Counting objects: 13858, done. remote: Compressing objects: 100% (50/50), done. remote: Total 13858 (delta 17), reused 0 (delta 0), pack-reused 13808 Receiving objects: 100% (13858/13858), 9.68 MiB | 79.00 KiB/s, done. Resolving deltas: 100% (8304/8304), done. Checking connectivity... done. root@OrangePI:~# cd orangepi/ root@OrangePI:~/orangepi# git pull origin spidev From https://github.com/marceloaqno/MySensors * branch spidev -> FETCH_HEAD Updating 570b607..63e1a81 Fast-forward Makefile | 16 +++ MyConfig.h | 4 + MySensors.h | 2 +- configure | 79 ++++++++++--- core/MyHwLinuxGeneric.cpp | 17 +++ core/MyHwLinuxGeneric.h | 12 +- core/MyHwRPi.cpp | 1 + core/MyHwRPi.h | 28 ----- core/MyMainLinux.cpp | 30 ++--- drivers/{RPi => BCM}/SPI.cpp | 10 +- drivers/{RPi => BCM}/SPI.h | 116 ++++++++++++------- drivers/{RPi => BCM}/Wire.cpp | 0 drivers/{RPi => BCM}/Wire.h | 1 + drivers/Linux/Arduino.h | 22 +++- drivers/Linux/GPIO.cpp | 119 ++++++++++++++++++++ drivers/Linux/GPIO.h | 47 ++++++++ drivers/Linux/Stream.h | 1 + drivers/Linux/compatibility.cpp | 11 +- drivers/{RPi/rpi_util.cpp => Linux/interrupt.cpp} | 144 +++++------------------- drivers/Linux/interrupt.h | 45 ++++++++ drivers/RF24/RF24.cpp | 4 +- drivers/RF24/RF24.h | 2 +- drivers/RPi/RPi.cpp | 59 ++++++++++ drivers/RPi/RPi.h | 22 ++++ drivers/RPi/piHiPri.c | 49 -------- drivers/RPi/rpi_util.h | 76 ------------- drivers/RPi/wiring.cpp | 72 ++++++++++++ drivers/RPi/wiring.h | 24 ++++ drivers/SPIDEV/SPI.cpp | 223 +++++++++++++++++++++++++++++++++++++ drivers/SPIDEV/SPI.h | 178 +++++++++++++++++++++++++++++ 30 files changed, 1054 insertions(+), 360 deletions(-) rename drivers/{RPi => BCM}/SPI.cpp (100%) rename drivers/{RPi => BCM}/SPI.h (62%) rename drivers/{RPi => BCM}/Wire.cpp (100%) rename drivers/{RPi => BCM}/Wire.h (99%) create mode 100644 drivers/Linux/GPIO.cpp create mode 100644 drivers/Linux/GPIO.h rename drivers/{RPi/rpi_util.cpp => Linux/interrupt.cpp} (63%) create mode 100644 drivers/Linux/interrupt.h create mode 100644 drivers/RPi/RPi.cpp create mode 100644 drivers/RPi/RPi.h delete mode 100644 drivers/RPi/piHiPri.c delete mode 100644 drivers/RPi/rpi_util.h create mode 100644 drivers/RPi/wiring.cpp create mode 100644 drivers/RPi/wiring.h create mode 100644 drivers/SPIDEV/SPI.cpp create mode 100644 drivers/SPIDEV/SPI.h root@OrangePI:~/orangepi# ./configure [SECTION] Detecting target machine. [OK] machine detected: SoC=H3, Type=unknown, CPU=armv7l. [SECTION] Detecting SPI driver. [OK] SPI driver detected:SPIDEV. [SECTION] Detecting init system. [OK] init system detected: systemd. [SECTION] Saving configuration. [SECTION] Cleaning previous builds. [OK] Finished. root@OrangePI:~/orangepi# make gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o drivers/Linux/interrupt.cpp: In function ‘void* interruptHandler(void*)’: drivers/Linux/interrupt.cpp:107:26: warning: ignoring return value of ‘ssize_t read(int, void*, size_t)’, declared with attribute warn_unused_result [-Wunused-result] (void)read (fd, &c, 1) ; ^ g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv8-a -mtune=cortex-a53 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV -DLINUX_ARCH_ORANGEPI -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/SPIDEV -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o In file included from ./MySensors.h:294:0, from examples_linux/mysgw.cpp:74: ./drivers/RF24/RF24.cpp:39:11: error: Not supported on this platform. hwDigitalWrite(MY_RF24_CS_PIN, level); ^ ./drivers/RF24/RF24.cpp:44:11: error: Not supported on this platform. hwDigitalWrite(MY_RF24_CE_PIN, level); ^ ./drivers/RF24/RF24.cpp:388:11: error: Not supported on this platform. hwPinMode(MY_RF24_CE_PIN,OUTPUT); ^ ./drivers/RF24/RF24.cpp:389:11: error: Not supported on this platform. hwPinMode(MY_RF24_CS_PIN,OUTPUT); ^ ./drivers/RF24/RF24.cpp:37:32: warning: unused parameter ‘level’ [-Wunused-parameter] LOCAL void RF24_csn(const bool level) ^ ./drivers/RF24/RF24.cpp:42:31: warning: unused parameter ‘level’ [-Wunused-parameter] LOCAL void RF24_ce(const bool level) ^ ./drivers/RF24/RF24.cpp: In function ‘uint8_t RF24_spiMultiByteTransfer(uint8_t, uint8_t*, uint8_t, bool)’: ./drivers/RF24/RF24.cpp:56:11: error: ‘LOW’ was not declared in this scope RF24_csn(LOW); ^ ./drivers/RF24/RF24.cpp:99:11: error: ‘HIGH’ was not declared in this scope RF24_csn(HIGH); ^ ./drivers/RF24/RF24.cpp: In function ‘void RF24_startListening()’: ./drivers/RF24/RF24.cpp:235:10: error: ‘HIGH’ was not declared in this scope RF24_ce(HIGH); ^ ./drivers/RF24/RF24.cpp: In function ‘void RF24_stopListening()’: ./drivers/RF24/RF24.cpp:241:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp: In function ‘void RF24_powerDown()’: ./drivers/RF24/RF24.cpp:251:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp: In function ‘bool RF24_sendMessage(uint8_t, const void*, uint8_t)’: ./drivers/RF24/RF24.cpp:269:10: error: ‘HIGH’ was not declared in this scope RF24_ce(HIGH); ^ ./drivers/RF24/RF24.cpp:276:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp: In function ‘bool RF24_initialize()’: ./drivers/RF24/RF24.cpp:395:10: error: ‘LOW’ was not declared in this scope RF24_ce(LOW); ^ ./drivers/RF24/RF24.cpp:396:11: error: ‘HIGH’ was not declared in this scope RF24_csn(HIGH); ^ Makefile:114: recipe for target 'build/examples_linux/mysgw.o' failed make: *** [build/examples_linux/mysgw.o] Error 1 root@OrangePI:~/orangepi#```
-
root@OrangePI:~/orangepi# sudo for A in 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16; do echo "$A" > /sys/class/gpio/export ; done -bash: syntax error near unexpected token `do' root@OrangePI:~/orangepi# ```
-
@Tag said:
sudo for A in 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16; do echo "$A" > /sys/class/gpio/export ; done
orangepi one have 40 pins
-
@Reza Is there /sys/class/gpio/export file on your OPi?
-
@marceloaqno
no i have not folder "gpio" in my orangepi
-
@marceloaqno It still doesn't work on my OPi Zero

root@opi-zero-1:~/orangepi# bin/mysgw -d
mysgw: Starting gateway...
mysgw: Protocol version - 2.2.0-beta
mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta
mysgw: TSM:INIT
mysgw: TSF:WUR:MS=0
mysgw: !TSM:INIT:TSP FAIL
mysgw: TSM:FAIL:CNT=1
mysgw: TSM:FAIL:PDT
mysgw: Received SIGINTI do have the /sys/class/gpio/export and I ran for A in 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16; do echo "$A" > /sys/class/gpio/export ; done
For the record, here's my OS:
BOARD=orangepizero BOARD_NAME="Orange Pi Zero" VERSION=5.24 LINUXFAMILY=sun8i BRANCH=default ARCH=arm PRETTY_NAME="Debian GNU/Linux 8 (jessie)" NAME="Debian GNU/Linux" VERSION_ID="8" VERSION="8 (jessie)" ID=debian HOME_URL="http://www.debian.org/" SUPPORT_URL="http://www.debian.org/support" BUG_REPORT_URL="https://bugs.debian.org/"
-
@mihai.aldea The gateway does the exporting when needed, you don't need to run:
for A in 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16; do echo "$A" > /sys/class/gpio/export ; doneCould you send the output of this command?
ls -lah /dev/spidev*
-
Still issues here:
root@orangepizero:~/orangepi/bin# ll /dev/spi* crw------- 1 root root 153, 0 Jan 9 22:51 /dev/spidev0.0 crw------- 1 root root 153, 1 Jan 9 22:51 /dev/spidev1.0Then:
./configure --spi-spidev-device=/dev/spidev1.0added to examples_linux/mysgw.cpp
#define MY_RF24_CE_PIN 2 #define MY_RF24_CS_PIN 13end enabled radio debugging:
output:
root@orangepizero:~/orangepi/bin# ./mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-beta mysgw: MCO:BGN:INIT GW,CP=RNNG---,VER=2.2.0-beta mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: RF24:write register, reg=0, value=14 mysgw: RF24:write register, reg=3, value=3 mysgw: RF24:write register, reg=4, value=95 mysgw: RF24:write register, reg=5, value=76 mysgw: RF24:write register, reg=6, value=39 mysgw: RF24:write register, reg=16, value=115 mysgw: RF24:write register, reg=29, value=6 mysgw: RF24:read register, reg=6, value=39 mysgw: RF24:read register, reg=5, value=76 mysgw: RF24:write register, reg=2, value=2 mysgw: RF24:write register, reg=1, value=0 mysgw: RF24:write register, reg=28, value=3 mysgw: RF24:flushRX mysgw: RF24:flushTX mysgw: RF24:write register, reg=7, value=112 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: RF24:write register, reg=2, value=3 mysgw: RF24:write register, reg=1, value=1 mysgw: RF24:STRT LIS mysgw: RF24:write register, reg=0, value=15 mysgw: RF24:write register, reg=10, value=0 mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: RF24:read register, reg=23, value=17 Illegal instruction root@orangepizero:~/orangepi/bin#Almost there?
-
@marceloaqno
in "orangepi one"(ubuntu os) there is not gpio folder in sys/class. but i think after run "modprobe gpio-sunxi" built a folder that name is "gpio_sw" and in this folder there are this files: normal_led,pa3,pa6,pa8 and 9,10,13,14,15,21 ,...
-
@Reza Is it too complicated to switch to Debian?
-
@mihai.aldea said:
Is it too complicated to switch to Debian?
you told me i change my os ? to armbian ?
-
@Reza
More info on armbian.comI use the debian jessie, works like a charm!
-
@Reza I wouldn't even dream of not using Armbian on OrangePi and NanoPi. Compared to Raspbian it's years ahead in terms of optimization and tidyness. Armbian is the reason I'm avoiding RPi when possible. So go ahead and install a proper OS for your OPi. Not sure if Xenial or Debian, maybe we should wait for @marceloaqno to respond to my comment with the running OS.
-
@Tag
i worked with armbiam before. but my question is with armbian my problem is resolve ?
-
That I can not say.
-
-
I confirm it's not working on the OPi PC where TMRh20 works.
-
@marceloaqno said:
@Tag Oops, did I get it right this time (I reuploaded the image)?
Got it spot on!! looks great!
-
i have problem with compile source domoticz(i must use source domoticz for my changes) in armbian, so i have to use ubuntu.
@marceloaqno can you help me to run mysensors gateway in orangepi one (ubuntu os).thank you
-
Hi All,
I put together the steps to get MySensors running on the OrangePi Zero:
Take note of the SPI part, 1 typo and you will not see /dev/spidev1.0-
Download and Install the ARMbian(debian) OS image
https://www.armbian.com/orange-pi-zero/ -
Install sunxi-tools:
These tools are required to make changes in the boot area of the system
sudo apt-get update sudo apt-get install sunxi-tools- How to add /dev/spidev1.0 (which is required since /dev/spidev0.0 is used for the onboard NAND flash)
cd /boot bin2fex /boot/script.bin /root/myscript.txtNow edit /root/myscript.bin and add/change the following so it looks exactly like the part below:
[spi0] spi_used = 1 spi_cs_bitmap = 1 spi_mosi = port:PC00<3><default><default><default> spi_miso = port:PC01<3><default><default><default> spi_sclk = port:PC02<3><default><default><default> spi_cs0 = port:PC03<3><1><default><default> [spi1] spi_used = 1 spi_cs_bitmap = 1 spi_cs0 = port:PA13<2><1><default><default> spi_sclk = port:PA14<2><default><default><default> spi_mosi = port:PA15<2><default><default><default> spi_miso = port:PA16<2><default><default><default> [spi_devices] spi_dev_num = 2 [spi_board0] modalias = "spidev" max_speed_hz = 33000000 bus_num = 0 chip_select = 0 mode = 0 full_duplex = 1 manual_cs = 0 [spi_board1] modalias = "spidev" max_speed_hz = 33000000 bus_num = 1 chip_select = 0 mode = 0 full_duplex = 1 manual_cs = 0- Then recompile the script file:
fex2bin /root/myscript.txt /boot/script.binReboot the system
reboot2 device files should exist now:
root@orangepizero:~# ls -l /dev/spi* crw------- 1 root root 153, 0 Jan 11 16:31 /dev/spidev0.0 crw------- 1 root root 153, 1 Jan 11 16:31 /dev/spidev1.0Load the gpio module
modprobe gpio-sunxiTo load the module gpio-sunxi automagically load at boot time, add gpio-sunxi to /etc/modules
echo gpio-sunxi >> /etc/modules- Now it is time to install the GW.
cd /root git clone https://github.com/marceloaqno/MySensors.git orangepi cd orangepi/ git pull origin spidev ./configure --spi-spidev-device=/dev/spidev1.0 makeWorking like a charm!
If you tested "/bin/mysgw -d" and all works as expected, make the installation permanent:
make installAdditional
If you want to read data into a controller using a device file (i.e Mycontroller) use the build string below./configure --spi-spidev-device=/dev/spidev1.0 --my-gateway=serial --my-serial-is-pty --my-serial-pty=/dev/ttyMySensorsGatewayHope this helps!! have fun!!
-
-
@Tag great! Thanks for the detailed explanation

I will add to the instructions page
-
out of curiousity: this all relates to 3.x kernel in armbian right? which has proprietary stuff in there?
i read somewhere that mainline 4.10 SPI is "work in progress"
-
@pansen
Yes correct, for OPI Zero only ARMbian 3.x is available as a download image.
I used the debian jessie one
-
Instructions page updated, let me know if there is any mistake.
-
looks great!! thx!!

-
Excellent work !!! It finally works, I believe the slight mistake was with the damn SPI device ID. Now that I've enabled /dev/spidev1.0 everything works perfect. Really nice job and awesome commitment to showing people that it's time for them to pull their heads out of their a.... and spend less for way more awesome boards because let's face it, RPi has the greatest community support but it's a nothing more than an expensive closed source crappy board.
-
@mihai.aldea
Great!!, found out the SPI0 is used for the NAND flash, once you add SPI1 to the script.bin, also the need board paragraph with bus 1 needs to be added otherwise it will not work.... anyway great you got mysensors up and running!!
About the RPI, i like both boards, and in my opinion the enormous success of the RPI is responsible, for the large collection of OPI boards that is available these days")
-
There are few who know that lots of asian compaines were producing SBC's long before RPi ever existed. RPi has to take credit for the SBC boom, but the connaisseurs will always prefer a top notch SBC that costs less than half of an RPi and is piled with features. Take the OPi Zero for instance, it's way smaller than RPi 3, has half the RAM and doesn't have Bluetooth. But you can buy 4 OPi Zeros with the money you'd spend on an RPi 3.
Anyway it's an endless debate here, I'm just glad I could help a bit bringing this to life, even though you and @marceloaqno did the heavy lifting.
-
Thank you for the hard work guys, I have a fresh orange pi zero and I will install armbian and try this hack as soon as possible. Looks like a great way to have an ultra compact&cheap controller + gateway system !
-
Support for OrangePi is now part of the official MySensors development repository.
In the official version, it is necessary to define the CE and CS pins, as the default ones will not work. This will change in the future, but more work needs to be done to better detect the different types of Orange Pi and other H3 soc boards.
For now, if you have set your system in the same way as the wiring instructions, use:./configure --spi-spidev-device=/dev/spidev1.0 --my-transport=nrf24 --my-rf24-ce-pin=2 --my-rf24-cs-pin=13
-
Thank you for your hard work and continued support on this!!
-
@mihai.aldea
It's working on my OPi One with Armbian. MySensors and TMRh20 works!Only in ./MySensors: bin Only in ./MySensors: build diff -ruBdX ex ./_MySensors/drivers/RF24/RF24.cpp ./MySensors/drivers/RF24/RF24.cpp --- ./_MySensors/drivers/RF24/RF24.cpp<>2017-01-28 10:24:03.557215399 +0200 +++ ./MySensors/drivers/RF24/RF24.cpp<->2017-01-28 10:58:51.757543157 +0200 @@ -29,7 +29,7 @@ LOCAL RF24_receiveCallbackType RF24_receiveCallback = NULL; #endif . -#ifdef LINUX_SPI_BCM +#if defined (LINUX_SPI_BCM) || (LINUX_SPI_SPIDEV) uint8_t spi_rxbuff[32+1] ; //SPI receive buffer (payload max 32 bytes) uint8_t spi_txbuff[32+1] ; //SPI transmit buffer (payload max 32 bytes + 1 byte for the command) #endif @@ -56,7 +56,7 @@ <----->RF24_csn(LOW); <----->// timing <----->delayMicroseconds(10); -#ifdef LINUX_SPI_BCM +#if defined (LINUX_SPI_BCM) || (LINUX_SPI_SPIDEV) <----->uint8_t * prx = spi_rxbuff; <----->uint8_t * ptx = spi_txbuff; <----->uint8_t size = len + 1; // Add register value to transmit buffer diff -ruBdX ex ./_MySensors/Makefile.inc ./MySensors/Makefile.inc --- ./_MySensors/Makefile.inc<->2017-01-28 10:49:53.990638008 +0200 +++ ./MySensors/Makefile.inc<-->2017-01-28 11:12:57.601198157 +0200 @@ -1,5 +1,5 @@ SOC=H3 -CPPFLAGS=-march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_SPIDEV. +CPPFLAGS=-march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DLINUX_SPI_SPIDEV -DMY_RF24_CE_PIN=7 -DSPI_S LDFLAGS=-pthread. PREFIX=/usr/local CC=gcc
-
Hi all
I want to give feedback here.
Today i tried to build a orange pi gateway with a connected usb - rs485 converter on it. And what should I say - It worked without problems. Many thanks to you all
Great
-
Hi to all, I don't know if this is the right thread, but I'm trying to use an odroid c1 as a gateway. I'm posting here because I think you all could help me.
The original thread I have done is this one
https://forum.mysensors.org/topic/6083/odroid-c1-as-getaway
Feel free to go over there and give me advises.
{kind=link}