fody weather station, wind sensor
-
Anyone heard of this before?
https://www.kjell.com/se/sortiment/hem-kontor-fritid/fritid/termometrar-vaderstationer/vaderstationer/fody-tempus-pro-vaderstation-med-bluetooth-smart-p96552
For 400 SEK(~€40) you get temp, hum, wind and rain on the outdoor unit and temp, hum and pressure on the indoor unit.
Worth its price.
I will open up the outdoor unit and try to connect to it with an Arduino.
Other name for this is Alecto WS-48000 -
I have now opened the outdoor unit.
Anyone that have a code for collection data from 8 IR receivers?
I need to find out what voltage the IR emitter is using, so I don't burn it.
EDIT: google says 1,4-1,6 volt
For wind it is simple to use interrupt
Temperature and Humidity I don't know what kind of sensor it is, that one I can easily change to e.g. si7021/SHT21For wind direction it is using IR.
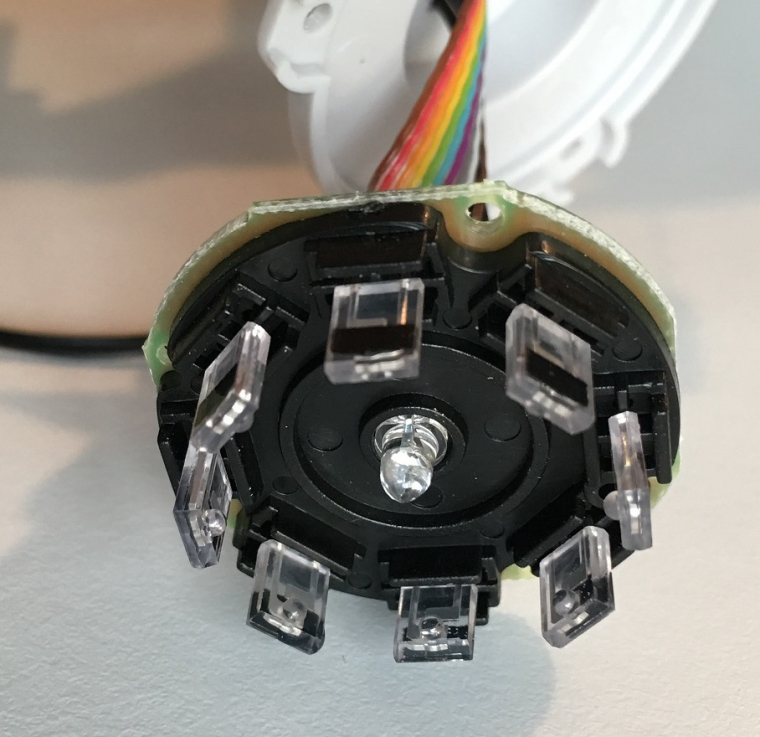
wheel to control where IR is pointing
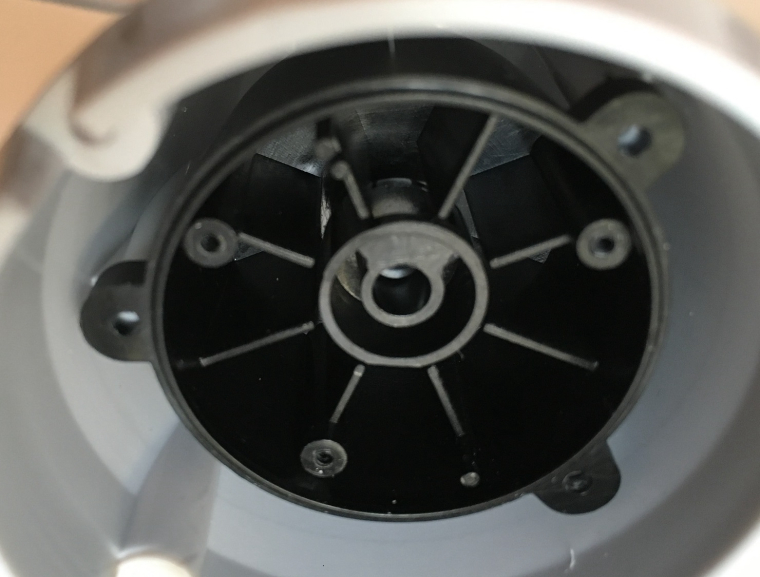
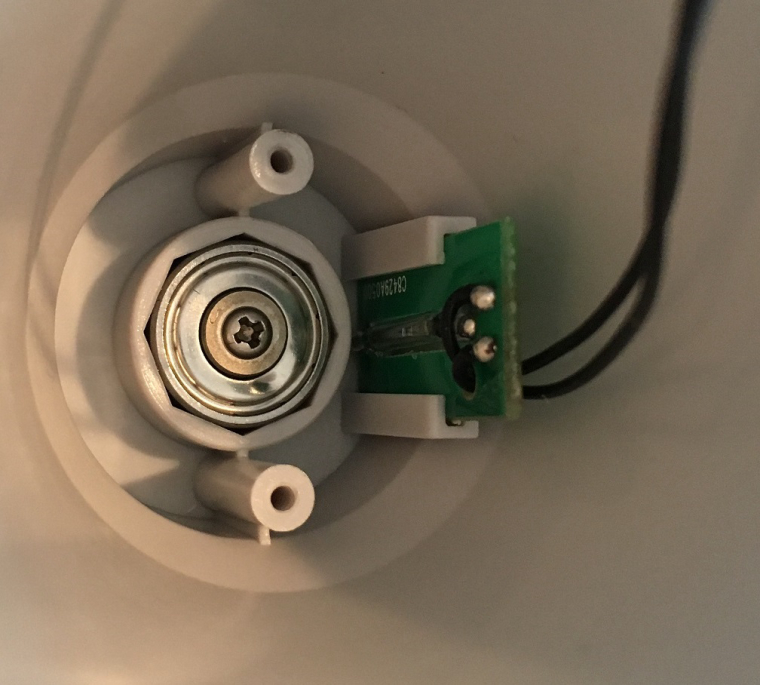
For wind speed it is reed switch
Control board
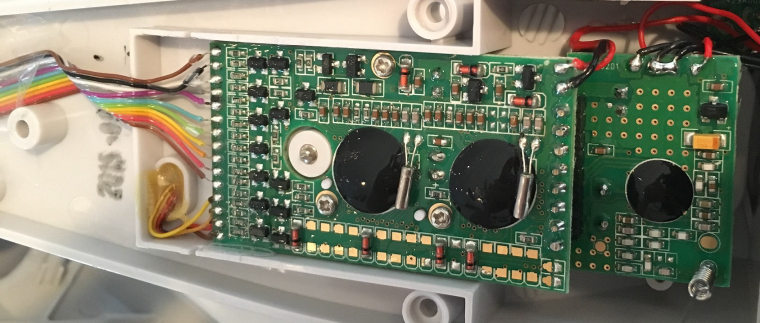
Temperature and Humidity, about 2 cm high
-
I have now opened the outdoor unit.
Anyone that have a code for collection data from 8 IR receivers?
I need to find out what voltage the IR emitter is using, so I don't burn it.
EDIT: google says 1,4-1,6 volt
For wind it is simple to use interrupt
Temperature and Humidity I don't know what kind of sensor it is, that one I can easily change to e.g. si7021/SHT21For wind direction it is using IR.
wheel to control where IR is pointing
For wind speed it is reed switch
Control board
Temperature and Humidity, about 2 cm high
-
@flopp the Ir 'emitter' is probably a led so you need a current of a few milli amps. Start low (1 kOhm in series) and find out when it starts to function.
-
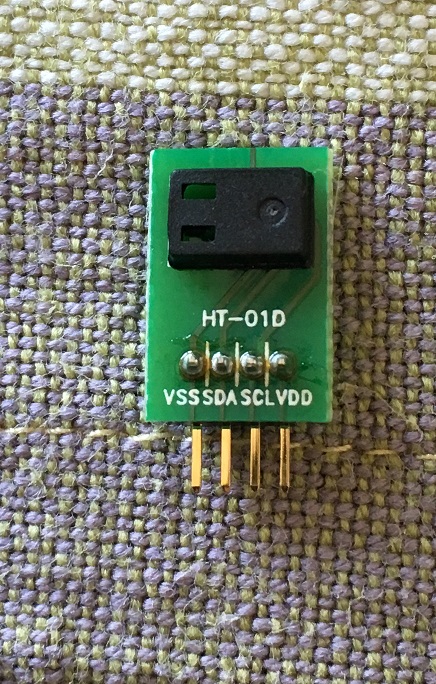
It was a HT-01D sensor for measuring temp/hum. It is I2C and address is 0x28.
I found code for HYT 221 that worked fine.
https://github.com/stylesuxx/Arduino-HYT-221-I2C -
For anyone interested, I am in the process of designing a fully 3D printable weather station. The plan for the 3D printable parts will be:
- rain gauge
- combined wind speed and wind direction sensors
- radiation shield that will house sensors for temp, humidity, barometric pressure and possibly a lux sensor.
- central brain box for holding the MySensors electronics to control everything.
I am just finishing the wind speed and direction sensor parts today. I will post pics later. I have a post in this category for the rain gauge that will be part of the station. I am designing all the parts myself. I still need to figure out a few more parts plus the MySensors electronics and code. I'll post everything as I get the different parts done.
-
@flopp are you still using old library version? Are you going to make it a battery powered node or else? I noticed you didn't use any sleep in the code
@gohan said in fody weather station, wind sensor:
@flopp are you still using old library version?
Yes, this is for 1.5
Are you going to make it a battery powered node or else?I noticed you didn't use any sleep in the code
This is powered from a PC, not battery. I want data very often that's why it is not battery powered. I can also change the code if something is wrong.
-
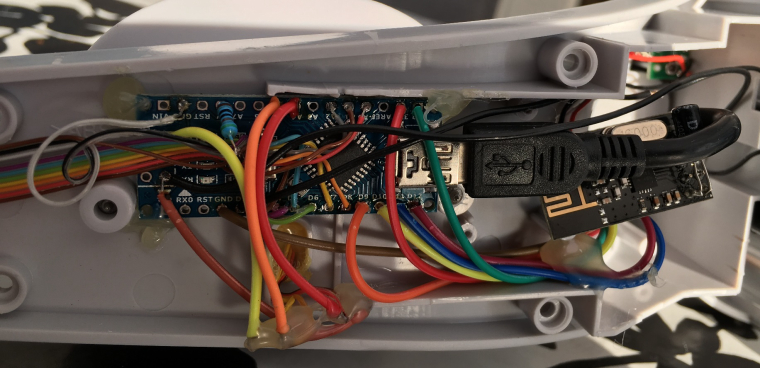
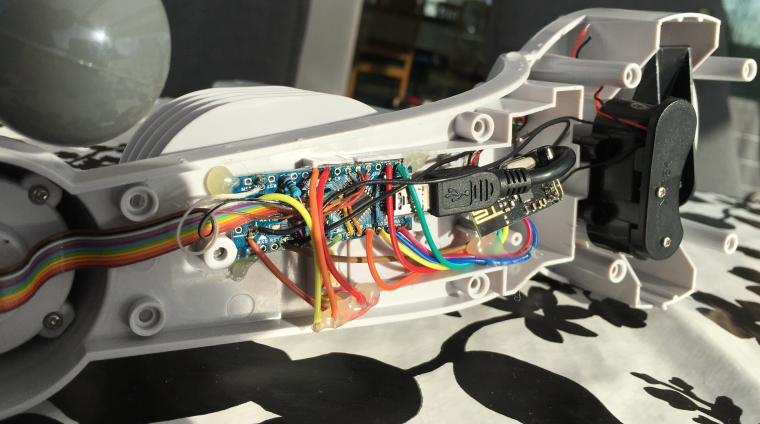
@flopp - any more images? :)
-
@flopp - any more images? :)
@sundberg84
Can upload some later today.
I found that I have some problem with the NRf, so I need to open it up.
Will upload new code later today, as well. -
I have not verify all the code yet.
Wind direction is correct.
Temp is little bit higher then another temp that I have on shadow so maybe the radiation shield is not working 100%
Hum: my other sensor that I have outdoor broke a few weeks ago, so nothing to compare with
Wind Speed: I want to verify with an RPM tool. I get some extra indication from reeed switch.
Every second indication is below 1000 micros which is 1 millisecond, which is 1000m/s
Rain: lucky or unlucky I have not had any rain when the mast was up and running -
@gohan said in fody weather station, wind sensor:
Maybe you need a better heat shield, did you try some aluminum foil?
Good idea :)
Should I have the foil inside the shield or outside?
Any pics if you done it yourself?
I think I need some air through the shield so it can cool down.


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login