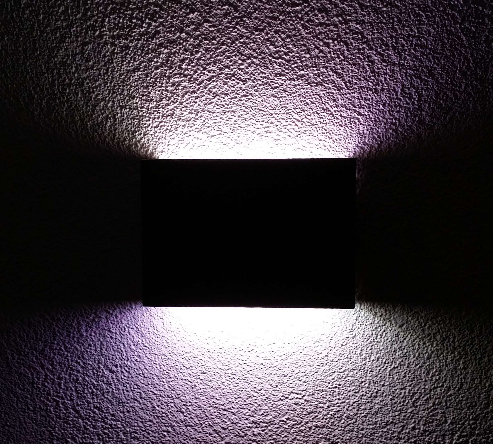
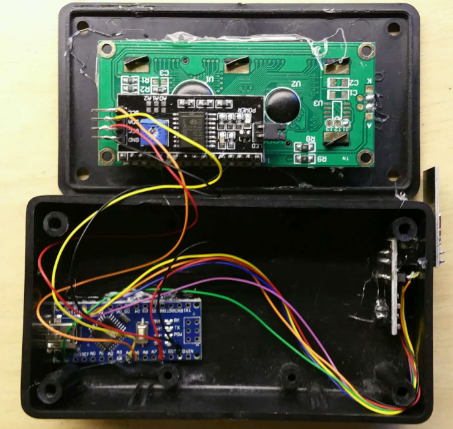
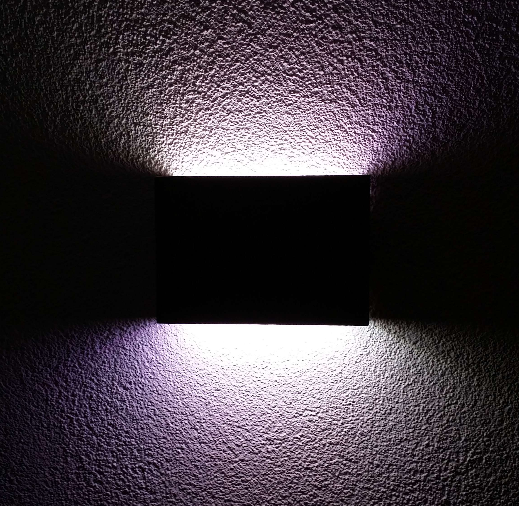
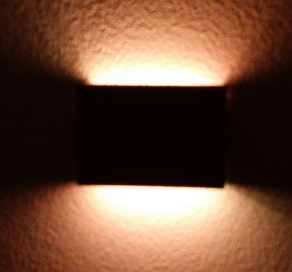
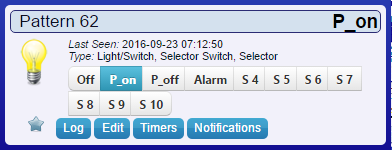
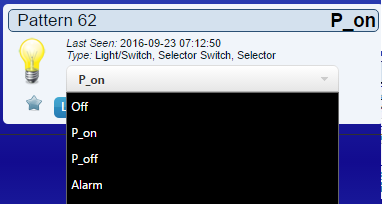
I made a few changes to my Wall mounted 'mood light' and translated it to MySensors v2.
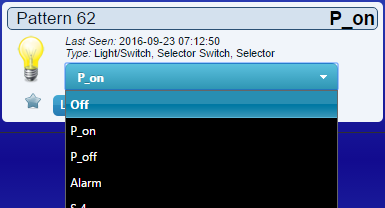
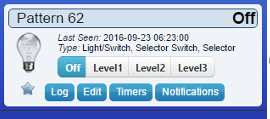
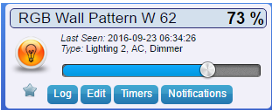
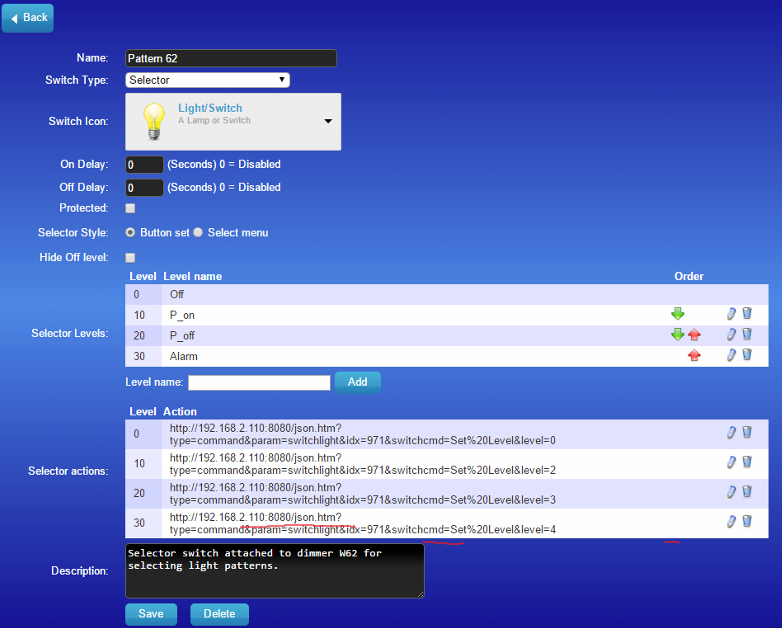
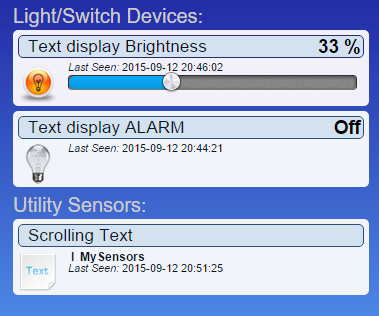
The sketch shows an example of using a Domoticz selector switch attached to a dimmer (V_PERCENTAGE) to switch between the different light patterns (line 413). I'm pretty sure you can use this trick for more controllers.
/*
PROJECT: MySensors / RGB light NEOPIXEL
PROGRAMMER: AWI
DATE: october 10, 2015/ last update: september 20, 2016
FILE: AWI_Wall_LIght_x.ino
LICENSE: Public domain
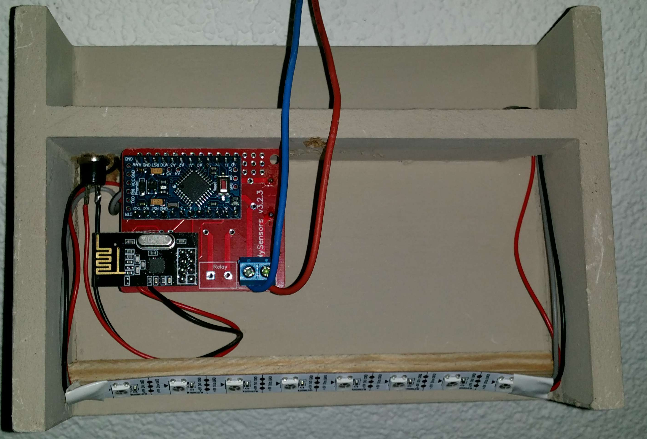
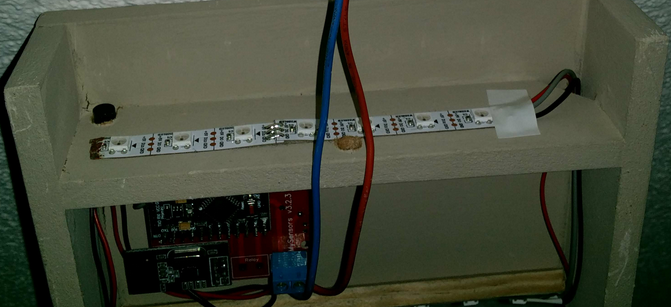
Hardware: Nano and MySensors 2.0, Wall light 16 WS2812B leds (neopixel)
Special:
uses Fastled library with NeoPixel (great & fast RBG/HSV universal library) https://github.com/FastLED/FastLED
SUMMARY:
Different patterns and brightness settings
Button switches on/off and cycles through all Color patterns on long press
Remarks:
Fixed node-id
Change log:
20160915 - Updated to MySensors 2.0
20160920 - Changed state change to dimmer i.s.o. switch()
*/
//**** MySensors *****
// Enable debug prints to serial monitor
#define MY_DEBUG
#define MY_RADIO_NRF24 // Enable and select radio type attached
//#define MY_RF24_CHANNEL 80 // radio channel, default = 76
#define MY_NODE_ID 62
#define NODE_TXT "W 62" // Text to add to sensor name
// #define MY_RF24_CE_PIN 7 // Ceech board, 3.3v (7,8) (pin default 9,10)
// #define MY_RF24_CS_PIN 8
// helpers
#define LOCAL_DEBUG // enable if print wanted
#ifdef LOCAL_DEBUG
#define Sprint(a) (Serial.print(a)) // macro as substitute for print, enable if no print wanted
#define Sprintln(a) (Serial.println(a)) // macro as substitute for println
#else
#define Sprint(a)
#define Sprintln(a)
#endif
#include <SPI.h> // My Sensors
#include <MySensors.h>
#include <FastLED.h> // https://github.com/FastLED/FastLED
#include "Button.h" // https://github.com/JChristensen/Button
const int stripPin = 5 ; // pin where 2812 LED strip is connected
const int buttonPin = 4 ; // push button
const int numPixel = 16 ; // set to number of pixels (x top / y bottom)
const int RGB_LightChild = 0 ; // Child Id's, standard light child on/off/ dim
const int RGB_RGBChild = 1 ; // RGB light child (on/off/dim/color, if controller supports V_RBG))
const int RGB_SolidColorChild = 2 ; // when set, node reads Color text from ColorTextChild
const int RGB_TextColorChild = 3 ; // Holds Text value for color (custom colors from controller)
const int RGB_AlarmPatternChild = 4 ; // Switches to alarm status
const int RGB_NextPatternChild = 5 ; // Move to next pattern when set
CRGB leds[numPixel];
// Kelving colors: Light & daylight (in Fastled reference only)
/// 1900 Kelvin Candle=0xFF9329 /* 1900 K, 255, 147, 41 */,
/// 2600 Kelvin Tungsten40W=0xFFC58F /* 2600 K, 255, 197, 143 */,
/// 2850 Kelvin Tungsten100W=0xFFD6AA /* 2850 K, 255, 214, 170 */,
/// 3200 Kelvin Halogen=0xFFF1E0 /* 3200 K, 255, 241, 224 */,
/// 5200 Kelvin CarbonArc=0xFFFAF4 /* 5200 K, 255, 250, 244 */,
/// 5400 Kelvin HighNoonSun=0xFFFFFB /* 5400 K, 255, 255, 251 */,
/// 6000 Kelvin DirectSunlight=0xFFFFFF /* 6000 K, 255, 255, 255 */,
/// 7000 Kelvin OvercastSky=0xC9E2FF /* 7000 K, 201, 226, 255 */,
/// 20000 Kelvin ClearBlueSky=0x409CFF /* 20000 K, 64, 156, 255 */
char setRGBvalue[] = "FFC58F"; // Controller sent RGB value, default tungsten40W
uint16_t curBrightness = 0x7F, setBrightness = 0x7F ; // Brightness globals (actualBrightness)
unsigned long updateBrightnessDelay, lastBrightnessUpdate ; // Brightness timers
int RGBonoff ; // OnOff flag
enum { pSolid, pOff, pOn, pAlarm, pFire, pFire2, pCandle, pCircle, pSinelon, pRainbow} ; // Pattern states (stored in int for convenience)
const int lastPatternIdx = pRainbow + 1 ; // use last pattern for patterncount
int curPattern = pSolid ; // current pattern
int setPattern = pSolid ; // set pattern (controller)
unsigned long updatePatternDelay, lastPatternUpdate ; // Pattern timers
unsigned long idleTimer = millis() ; // return to idle timer
const unsigned long idleTime = 10000UL; // return to idle after 10 secs
const unsigned long dimTime = 1000UL; // dim period
const unsigned long heartbeatInterval = 1 * 60UL * 1000UL ; // heartbeatinterval, just to let the controller know I am alive
unsigned long heartbeatCounter = 0 ;
MyMessage lightRGBMsg(RGB_LightChild, V_RGB); // standard messages, light
MyMessage lightdimmerMsG(RGB_LightChild ,V_DIMMER);
MyMessage lightOnOffMessage(RGB_LightChild, V_STATUS);
Button myBtn(buttonPin, true, true, 20); //Declare the button (pin, pull_up, invert, debounce_ms)
// Simple state machine for button state
enum {sIdle, sBrightness, sPattern} ; // simple state machine for button press
int State ;
void setup() {
FastLED.addLeds<WS2812B, stripPin, GRB >(leds, numPixel); // initialize led strip (NEOPIXEL =WS...)
for(int i = 0 ; i < 6 ; i++) { // get color value from EEPROM (6 char)
setRGBvalue[i] = loadState(i) ;
}
setLightPattern(pSolid, 0) ; // default controller Solid
FastLED.show();
State = sIdle ; // Initial state
//randomSeed(analogRead(0));
}
void presentation(){
// MySensors
sendSketchInfo("AWI RGB Wall " NODE_TXT, "2.0");
present(RGB_RGBChild, S_RGB_LIGHT, "RGB Wall RGB " NODE_TXT);// present to controller
present(RGB_LightChild, S_LIGHT, "RGB Wall Light " NODE_TXT);
present(RGB_SolidColorChild, S_LIGHT, "RGB Set Solid color (text) " NODE_TXT);
present(RGB_TextColorChild, S_INFO, "RGB Wall textcolor " NODE_TXT);
present(RGB_AlarmPatternChild, S_BINARY, "RGB Wall Alarm " NODE_TXT);
present(RGB_NextPatternChild, S_DIMMER, "RGB Wall Pattern " NODE_TXT);
}
// read button and act accordingly
// short press: on/off
// longer press: set patterns with following short press
// long press: set brightness increase
void loop() {
myBtn.read(); //Read the button (only read)
unsigned long now = millis(); // loop timer reference
switch (State) {
case sIdle: // default state, browse through patterns
if (myBtn.wasReleased()){ // light on/ off in idle
RGBonoff = !RGBonoff ; // invert light state
setLightBrightness((RGBonoff == 1)?setBrightness:0, dimTime);
send(lightOnOffMessage.set(RGBonoff)); // and update controller
} else if (myBtn.pressedFor(800)){ // move to Pattern update state with long press
idleTimer = now ; // return to idle after ...
State = sPattern ;
}
break ;
case sPattern: // entered after long press
if (myBtn.pressedFor(4000)){ // when press even longer move to Brightness update
State = sBrightness ;
} else if (myBtn.wasPressed()){
setPattern = (setPattern + 1) % lastPatternIdx ; // increase pattern and wrap
setLightPattern((setPattern), 500 );
idleTimer = now ;
} else if ( now > idleTime + idleTimer ){ // return to idle after ...
State = sIdle ;
}
break ;
case sBrightness: // entered after looong press
if (myBtn.wasPressed()){ // if pressed again increase brightness
setLightBrightness((curBrightness+0x1F) % 0xFF, 0) ; // increase brightness and wrap (0..0xFF)
idleTimer = now ;
} else if ( now > idleTime + idleTimer ){ // return to idle after ...
State = sIdle ;
}
break ;
default :
State = sIdle ;
break ;
}
updateLightBrightness(); // update Brightness if time
updateLightPattern(); // update Pattern if time
if ( now > heartbeatCounter + heartbeatInterval){ // heartbeat every hour
sendHeartbeat();
heartbeatCounter = now ;
}
}
// Sets the light brightness, takes value and time (ms) as input
void setLightBrightness(int newBrightness, unsigned long updateTime){
// global: curBrightness, actualBrightness, updateBrightnessDelay
updateBrightnessDelay = updateTime / 0xFF ; // delay = time / max steps
curBrightness = newBrightness ; // set curBrightness to new value, rest is done in update
}
// Update the light brightness if time
void updateLightBrightness(){
// global: curBrightness, actualBrightness, updateBrightnessDelay, lastBrightnessUpdate ;
static byte actualBrightness ; // store real brightness state for slow dim
unsigned long now = millis() ;
if (now > lastBrightnessUpdate + updateBrightnessDelay){// check if time for update
if ( actualBrightness > curBrightness) {
FastLED.setBrightness( actualBrightness-- );
FastLED.show();
} else if ( actualBrightness < curBrightness){
FastLED.setBrightness( actualBrightness++ );
FastLED.show();
}
lastBrightnessUpdate = now ;
}
}
// **** Pattern routines *****
// Sets and initializes the light pattern if nescessary
void setLightPattern( int newPattern, unsigned long updateDelay){
// global: curPattern, updatePatternDelay
static int lastPattern = pSolid ; // last pattern for pOn / pOff virtual patterns
if (newPattern == pOff) lastPattern = curPattern ; // remember last pattern
if (newPattern == pOn) curPattern = lastPattern ; // only for pOn switch to last pattern
else curPattern = newPattern ;
updatePatternDelay = updateDelay ; // delay for next pattern update, can be changed in pattern
switch(curPattern){
case pSolid: // solid is set value in all pixels (and on)
for(int i = 0 ; i < numPixel ; i++) leds[i] = strtol( setRGBvalue, NULL, 16);
setLightBrightness(setBrightness, dimTime) ; // slow dim to on
FastLED.show();
break ;
case pOn: // On is set Brightness in all pixels
setLightBrightness(setBrightness, dimTime) ; // slow dim to on
FastLED.show();
break ;
case pOff: // off state all pixels off (add dim and pOn)
setLightBrightness(0, dimTime) ; // slow dim to off
FastLED.show();
break ;
case pCircle: // all pixels off
for(int i = 0 ; i < numPixel ; i++) leds[i] = 0 ;
for(int i = 0 ; i < 2 ; i++){
leds[i] = strtol( setRGBvalue, NULL, 16) ; // 1 pixel on
}
FastLED.show();
break ;
default :
setLightBrightness(setBrightness, dimTime) ; // slow dim to on
FastLED.show();
break ;
}
}
// Update the light pattern when time for it
void updateLightPattern(){
// global: curPattern, updatePatternDelay, lastPatternUpdate
unsigned long now = millis() ;
if (now > lastPatternUpdate + updatePatternDelay){ // check if time for update
switch (curPattern) {
case pAlarm: // flash light
patternAlarm();
break ;
case pFire: // wild fire
patternFire();
break ;
case pFire2: // cosy fire
patternFire2();
break ;
case pCandle: // flame
patternCandle();
break ;
case pCircle: // flame
patternCircle();
break ;
case pRainbow: // rotating rainbow
patternRainbow();
break ;
case pSinelon: // rotating rainbow
patternSinelon();
break ;
case pSolid: // do nothing fall through
case pOff:
case pOn:
default : // def
break ;
}
lastPatternUpdate = now ;
}
}
// Define the different patterns
// Alarm - intermittent white and red color, full intensity, intermittent top & bottom half
void patternAlarm() {
static boolean topBot ; // indicates direction for next entry
const CRGB colorTop = CRGB(0xFF, 0, 0 ); // red color
const CRGB colorBottom = CRGB(0xFF, 0xFF, 0xFF ); // white color
FastLED.setBrightness(0xFF); // set the strip brightness to max for Alarm
for(int i=0; i <= (numPixel / 2 - 1) ; i++) { // for half of strip size
leds[i] = topBot?colorTop:colorBottom ;
leds[i+ (numPixel/2)] = topBot?colorBottom:colorTop ;
}
topBot = !topBot ; // switch direction
FastLED.show();
}
// Simulate fire with red color, varying number of leds intensity & tempo
void patternFire() {
byte numberLeds = random(0,numPixel); // start number and end of led's for flickering
int lum = ((random(100,255) * curBrightness)) / 0xFF ; // set brightness and scale
CRGB color = CRGB(200, random(70,230),0 ); // get red color with varying green
for(int i=0; i <= numberLeds; i++) {
leds[i] = color ;
FastLED.setBrightness(lum); // set the strip brightness
FastLED.show();
wait(random(0,10)); // (blocking, need to be changed)
}
updatePatternDelay = 100 ;
}
// Simulate fire with red color and varying intensity & tempo
void patternFire2() {
CRGB color = CRGB(200, random(100,150),0); // get red color with varying green
for (byte p=0; p < numPixel; p++) {
leds[p] = color;
}
FastLED.setBrightness((random(50,255) * curBrightness)/ 0xFF ); // set Brightness and scale
FastLED.show();
updatePatternDelay = random(20,300); // variable delay
}
// Simulate candle based on fire with red color, varying number of leds intensity & tempo
void patternCandle() {
byte numberLeds = random(0,numPixel); // start number and end of led's for flickering
byte lum = ((random(100, 255) * curBrightness)/ 0xFF); // set brightness
CRGB color = CRGB(200, random(90,130),0 ); // get red color with varying green
for(int i=0; i <= numberLeds; i++) {
leds[i] = color ;
FastLED.setBrightness(lum); // set the strip brightness
FastLED.show();
wait(random(5,10)); // (blocking, need to be changed)
}
updatePatternDelay = 100 ;
}
// a colored dot sweeping back and forth, with fading trails, adapted from Fastled sinelon
void patternSinelon()
{
fadeToBlackBy( leds, numPixel, 10); // fade all leds a small amount
int pos = beatsin8(25,0,numPixel); // get a new position for the led (BPM = 13, min, max, )
leds[pos] += strtol( setRGBvalue, NULL, 16);
FastLED.show();
updatePatternDelay = 2 ;
}
// Rotate all Leds with current content and trail
void patternCircle() {
static int currentLed ; // indicated current led to light
// CRGB tempLed = leds[0]; // temporary variable for color
fadeToBlackBy( leds, numPixel, 128); // fade all leds for trail..
leds[currentLed] = strtol( setRGBvalue, NULL, 16); // set to current color
currentLed = (currentLed + 1) % numPixel ; // wrap
FastLED.show();
updatePatternDelay = 100 ;
}
void patternRainbow() {
static uint16_t hue ; // starting color
FastLED.clear();
// for(hue=10; hue<255*3; hue++) {
hue = (hue+1) % 0xFF ; // incerease hue and wrap
fill_rainbow( leds, numPixel , hue /*static hue value */, 1);// set a rainbow from hue to last in stepsize 1
FastLED.show();
updatePatternDelay = 100 ;
}
// Incoming messages from MySensors
void receive(const MyMessage &message) {
int ID = message.sensor;
Serial.print("Sensor: ");
Serial.println(ID);
switch (ID){
case RGB_LightChild: // same behaviour as RGB child/ fall through
case RGB_RGBChild: // if controller can handle V_RGB
if (message.type == V_RGB) { // check for RGB type
strcpy(setRGBvalue, message.getString()); // get the payload
setLightPattern(pSolid, 0); // and set solid pattern
} else if (message.type == V_DIMMER) { // if DIMMER type, adjust brightness
setBrightness = map(message.getInt(), 0, 100, 0, 255);
setLightBrightness(setBrightness, dimTime) ;
} else if (message.type == V_STATUS) { // if on/off type, toggle brightness
RGBonoff = message.getInt();
setLightBrightness((RGBonoff == 1)?setBrightness:0, dimTime);
}
break ;
case RGB_SolidColorChild: // request color from controller
if (message.type == V_STATUS) { // if get color from text child
request(RGB_TextColorChild, V_TEXT);
setLightPattern(pSolid, 0); // and set solid pattern (if not alre)
}
break ;
case RGB_TextColorChild: // Text color from controller
if (message.type == V_TEXT) { // if get color from text child
strcpy(setRGBvalue, message.getString()); // get the payload
for(int i = 0 ; i < 6 ; i++) { // save color value to EEPROM (6 char)
saveState(i, setRGBvalue[i]) ;} // Save to EEPROM
}
break ;
case RGB_AlarmPatternChild: // set Alarm pattern
if (message.type == V_STATUS) { // if get color from text child
if (message.getInt() == 1){
setLightPattern(pAlarm, 500); // set slow alarm pattern
} else {
setLightPattern(setPattern, 0); // and reset pattern
FastLED.setBrightness(setBrightness);
}
}
break ;
case RGB_NextPatternChild: // next pattern
if (message.type == V_PERCENTAGE) { // Percentage indicates the pattern
setPattern = map(message.getInt(), 0, 100, 0, 15) % lastPatternIdx ; // mapper dimmer value to state 0..9 and wrap
setLightPattern((setPattern), 500 );
Sprint("Pattern: ") ; Sprintln(setPattern) ;
} else if (message.type == V_STATUS){ // if off switch pattern to default == 0
setPattern = 0 ;
setLightPattern((setPattern), 500 );
Sprint("Pattern: ") ; Sprintln(setPattern) ;
}
break ;
}
FastLED.show();
dispRGBstat();
}
// debug
// display the status of all RGB: controller, requested, real
void dispRGBstat(void){
Serial.print(" Color: "); Serial.print(setRGBvalue);
Serial.print(" Brightness: "); Serial.println(setBrightness);
}
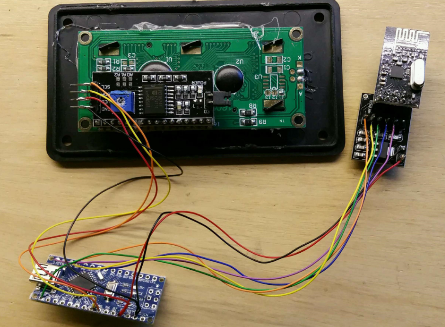

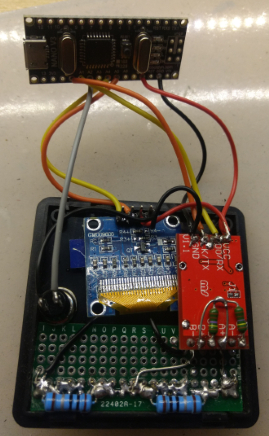





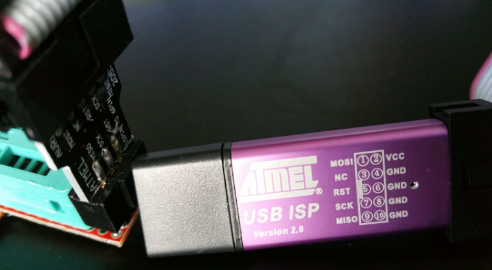
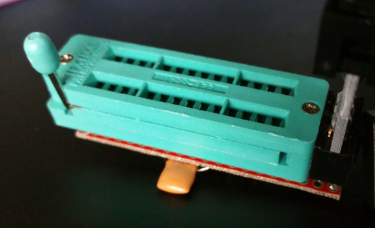

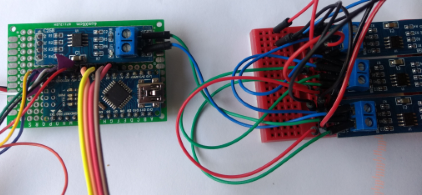
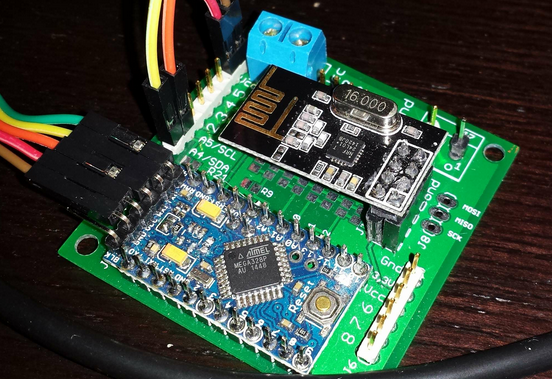
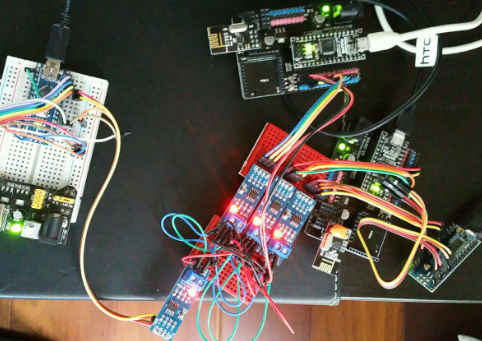
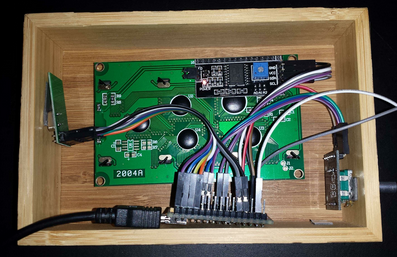
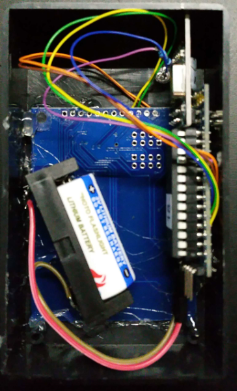
 a radio and a few cables
a radio and a few cables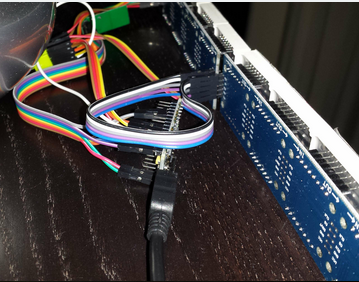
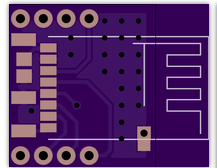
 The yellow part is a smd tantalum 4.7uF capacitor. I had the smd nRF24l01 already soldered on the board (takes a little exercise).
The yellow part is a smd tantalum 4.7uF capacitor. I had the smd nRF24l01 already soldered on the board (takes a little exercise).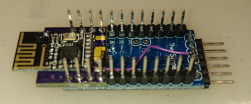
 You need wires from the board to Vcc and Gnd.
You need wires from the board to Vcc and Gnd.
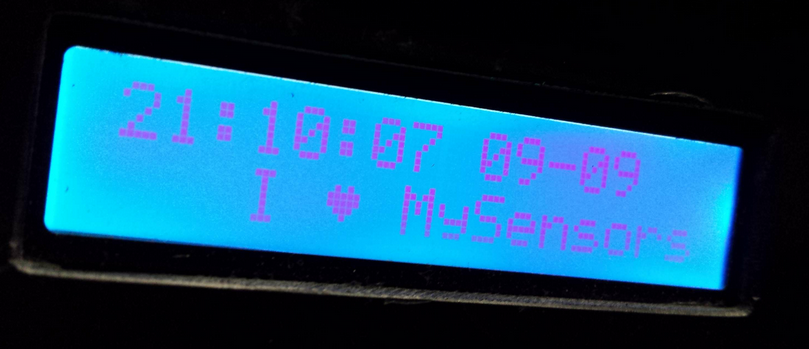
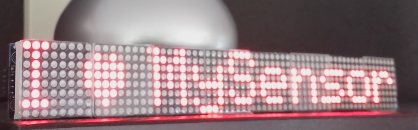
 (also added message communication to the display from the controller (V_TEXT).
(also added message communication to the display from the controller (V_TEXT).

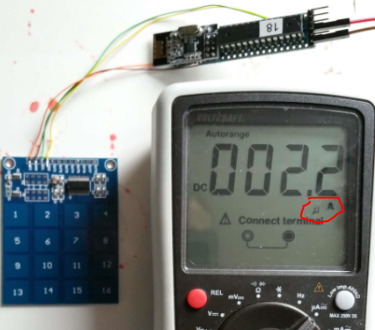


 . The bi-color LED was added to show the on/off state when toggling a scene. (and because
. The bi-color LED was added to show the on/off state when toggling a scene. (and because 
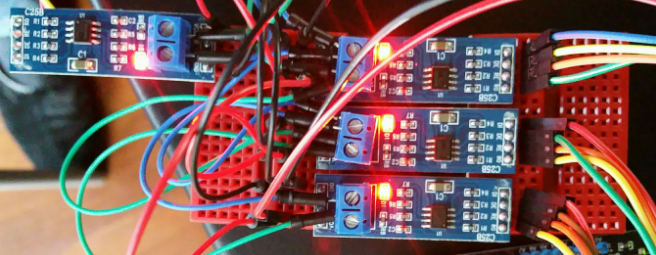
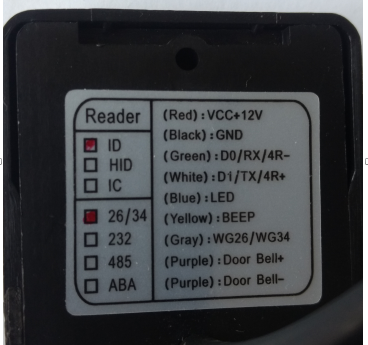 The back side shows the wiring: Wiegand wires are D0 and D1. I also use the LED and BEEP to get some feedback to the user. (the WG26/WG34 can be used to switch between 26 and 34 bit protocol, the "door bell" wires are not even there :confused: )
The back side shows the wiring: Wiegand wires are D0 and D1. I also use the LED and BEEP to get some feedback to the user. (the WG26/WG34 can be used to switch between 26 and 34 bit protocol, the "door bell" wires are not even there :confused: )